丘陵山區低矮樹型果園立式微耕機的設計與試驗
2021-03-05 10:01:24陳平錄翟因敏劉木華
機械設計與制造 2021年2期
陳平錄,許 靜,翟因敏,劉木華
(1.江西農業大學工學院,江西 南昌 330045;2.江西省現代農業裝備重點實驗室,江西 南昌 330045)
1 引言
微耕機是一種主要用于丘陵山區小塊田作業的小型農業耕作機械,以其靈活性強、質量輕、適應能力強等特點,能較好的解決大型機械在小田塊作業不便的問題,使得微耕機逐漸成為了較受廣大農民用戶歡迎的農業機械之一[1-5],隨著國家農機補貼政策的實施,微耕機在山地、丘陵等地區的需求量將進一步增加[6]。我國是世界上果園種植面積最大的國家之一,而有大約2/3 的種植地點是分布在丘陵山區及高原地區,其中,低矮樹型占絕大部分。因此,微耕機具有較大的需求市場。但現有微耕機在針對丘陵山區低矮樹型果園作業時,還存在高度太高,無法進入樹冠下作業區域;地勢起伏,耕深難以保持穩定;無施肥機構或施肥不均勻等問題,無法滿足該地區果園的作業要求。
國內外學者及企業對丘陵山區果園用機械進行不少研究,如氣爆松土注肥機[7]、液壓微耕機[8]、自走式茶園微耕機[9]田園作業的微耕機[10]以及振動式微耕機[11]等。目前市場上也有多種型號微耕機銷售,如重慶的合盛、鑫源、威馬等微耕機企業生產的1WG3.0型、95 型、WM610 型等機型,洛陽卓格哈斯生產的玉嬌龍微耕機、戰農公司生產的多功能微耕機。但上述微耕機都難以同時做到在機型高度、耕深穩定、施肥均勻三個方面滿足丘陵山區低矮樹型果園的作業要求。
因為丘陵山區果園樹型低矮,微耕機工作部件要伸入樹冠進行松土施肥作業,同時,微耕機要能適應丘陵山區地形調整耕深,保證施肥深度的一致性。因此,通過優化減速器傳動結構,降低微耕機前端高度;設計了一種耕深控制機構與施肥機構,保證耕深的穩定性和施肥的均勻性。為評價所設計的微耕機性能,以碎土率、平均耕深、施肥均勻性為指標,進行試驗測定。
2 立式微耕機設計需求
以江西省撫州市的南豐蜜桔果園為例,通過多次實地調研,總結出了丘陵山區低矮樹型果園微耕機作業的具體設計需求如下:
(1)果樹樹型低矮,樹冠離地面高度一般在(400~500)mm 之間。微耕機工作部件要伸入樹冠進行松土施肥作業,因此,微耕機前端高度應小于400mm。
(2)南豐蜜桔果樹根須較淺,一般在土層100mm 左右即會存在果樹根須,且受丘陵山區地形坡度的影響,微耕機松土作業應保持耕深100mm 較合適。
(3)根據果農的經驗,果樹的肥料施在地表以下100mm 左右,效果最佳。希望微耕機集松土、施肥功能于一身,松土的同時完成施肥作業,既保證了施肥的深度,又減少了田間作業強度。
3 立式微耕機設計
3.1 立式微耕機結構及原理
根據設計要求,微耕機采用立式結構,其工作原理圖,如圖1所示。由發動機、傳動系統、工作部件、耕深控制機構、施肥機構等部分組成。螺旋刀與減速器間設有耕深控制機構。傳動系統由離合器、聯軸器、錐齒輪傳動及直齒輪傳動等組成;工作部件為螺旋刀;施肥機構由肥料箱、施肥滾子及施肥鏈輪等組成。作業時,動力經發動機、離合器、聯軸器、錐齒輪、直齒輪,最后傳遞至螺旋刀,螺旋刀切削并運送土壤,土壤在離心力作用下甩至擋泥板內,土壤在自身重力作用下掉落地面,使土壤更細碎。整機主要技術參數,如表1 所示。
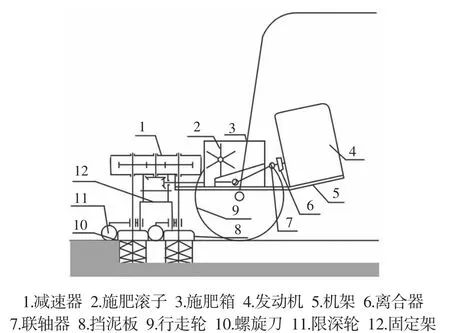
圖1 立式微耕機工作原理圖Fig.1 Working Principle of Vertical Micro-Cultivator

表1 立式微耕機技術參數Tab.1 Technical Parameters of Vertical Micro-Cultivator
3.2 微耕機關鍵部件設計
螺旋刀、減速器、耕深控制機構與施肥機構是實現微耕機松土作業、耕深穩定及均勻施肥功能的重要機構,其中螺旋刀的設計過程參考相關文獻[12-14]。減速器采用三輸出軸結構,各輸出軸間相互平行,將輸出軸投影在其周向平面內,則其軸心線的投影點分別位于等邊三角形的三個頂點處,該結構布置方式下,有利于在輸出軸間放置錐齒輪傳動,使錐齒輪傳動處于直齒輪傳動下方位置,極大的降低了減速器高度。根據發動機轉速與螺旋刀轉速間的關系,減速器設計傳動比取為10。
3.2.1 耕深控制機構
在丘陵山區作業時,傳統限深輪機構在刀輥軸向方向很難保持耕深穩定,需要設計一種耕深控制機構,使得三個螺旋刀具能夠在高度方向上相互獨立,保證山地起伏地面的耕深穩定。設計了一種壓縮彈簧控制伸縮軸機構,通過彈簧伸縮變化來保持耕深穩定。
(1)耕深控制機構結構及原理
耕深控制機構原理,螺旋刀軸套筒軸7 安裝在減速器輸出管軸6 內,兩者采用間隙配合,兩軸上均有鍵槽,并通過滑動滾珠5 進行徑向固定,減速器輸出管軸6 內鍵槽較長,作為滑道使用,螺旋刀軸套筒軸7 可在減速器輸出管軸6 內做軸向滑動;在減速器輸出管軸6 內,放置一個壓縮彈簧4,彈簧兩端分別頂緊在螺旋刀軸套筒軸7、推力球軸承1 端面;螺旋刀軸12 通過銷釘固定在螺旋刀軸套筒軸7 內,套杯8 內放置有一軸承,該軸承一端與螺旋刀軸套筒軸7 接觸,并通過頂緊彈簧11 將套杯8 內推力球軸承頂緊;套杯8 上加工有螺栓孔,限深輪9 通過螺栓安裝在套杯8 上,如圖2 所示。
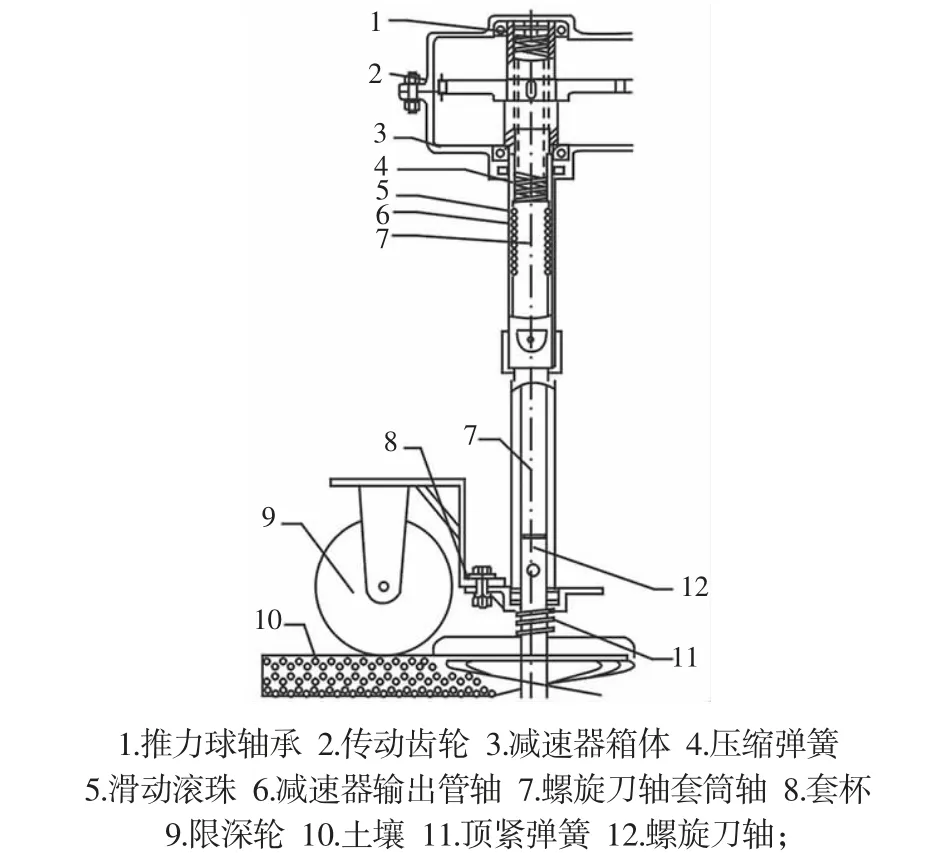
圖2 耕深控制機構原理圖Fig.2 Schematic Diagram of Tillage Depth Control Mechanism
耕深控制機構工作原理為:在松土作業時,限深輪9 與地面接觸并支撐微耕機部分重量,當地面伏起時,限深輪9 帶動螺旋刀軸套筒軸7 在減速器輸出管軸6 內同步向上運動;當地面下沉時,在壓縮彈簧4 作用下,螺旋刀軸套筒軸7 往下運動,保證刀具位置變化與地面起伏變化同步,從而保證耕深穩定。
(2)設計過程
由工作原理可知,壓縮彈簧是耕深控制機構的相關零件,其彈性特性對耕深控制機構的工作效果影響很大。彈簧彈性特性需要根據刀具入土過程的受力情況來設計。
螺旋刀入土作業時,入土的垂直阻力等于刀尖入土阻力F尖和刀片入土阻力F刀之和,使用經驗公式進行計算[15]。

式中:q—系數,堅實土壤取3.2kN/m;
K—切應力變形阻力系數,1.7kN/m2;
s—垂直方向每轉進給量,取為0.01m;
D尖—刀尖直徑,取為0.015m。
刀片入土阻力計算經驗公式為:

式中:q0—土壤阻力比例系數,取為3.8kN/m;
φ—土壤內摩擦角,取值22.8°;
K0—土壤變形阻力系數,取值250kN/m;
δ—入土刀片切削角,取為30°;
γ—土壤與入土刀片外摩擦角,取為31°;
r0—刀尖半徑,取為0.0075m;
R—螺旋刀外半徑,取為0.06m。
已知入土阻力F=F尖+F刀,將式(1)和式(2)代入可得:

將相關參數代入式(3)可求得螺旋刀入土阻力F。
當微耕機在無起伏的水平地面作業時,螺旋刀具應處于其高度方向上的行程的一半位置,此時,壓縮彈簧的壓縮量為耕深h 的一半。為應對螺旋刀的行程變化,彈簧的壓縮范圍應大于等于耕深h。由于彈簧安裝在減速器輸出軸內,受減速器輸出軸的尺寸限制,彈簧大徑應小于減速器輸出軸內孔。假設彈簧剛度為pt,變形量為ΔL,則有:

3.2.2 施肥機構設計
作物的施肥方式包含基肥、種肥、追肥三種。這三種施肥方式的階段與方法都有所不同,本設計的施肥機構主要用于果樹追肥。追肥主要用于作物生長發育階段,以有機肥為主。設計時,機構需滿足以下設計要求:
(1)結構要求:需考慮到微耕機主要用于山地丘陵地區作業,要求輕便靈巧,微耕機兩車輪間距較小,所以肥料箱的尺寸不宜過大,結構緊湊簡單;
(2)作業參數要求:耕幅360mm,施肥寬度范圍也設置為360mm,肥料箱設計長度為360mm;
(3)根據刀具作業效率,一次裝肥量10kg 為宜;
(4)根據微耕機減速器與發動機安裝位置,肥料箱的寬度不能超過0.3m;
(5)肥料箱下方安裝有聯軸器,聯軸器傾斜角度25°,需預留聯軸器空間;
(6)以南豐蜜桔為例,每棵果樹的施肥量為(50~200)g。
施肥機構的結構及工作原理,如圖3 所示。施肥鏈輪2 安裝在車輪軸上,施肥鏈輪1 安裝在施肥滾子上。當微耕機車輪轉動時,通過鏈傳動,將動力傳遞至施肥滾子,施肥滾子轉動,帶動肥料從肥料箱入料口到出料口,完成施肥。整個過程中,行走輪行進速度與施肥滾子角速度同步,實現均勻施肥。
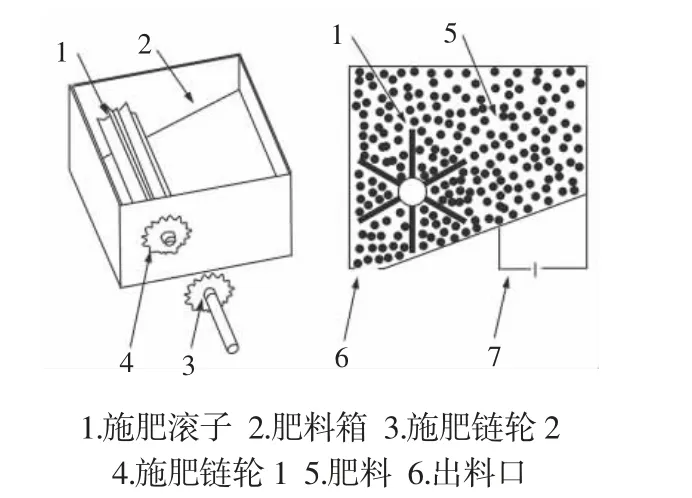
圖3 施肥機構工作原理圖Fig.3 Working Principle of Fertilizing Mechanism
經實驗測得,復合肥的平均密度為ρ肥=0.84×103kg/m3,顆粒平均直徑為0.54×10-3m,根據質量與體積關系,肥料箱可裝肥部分體積為V肥=1.2×10-2m3。
已知微耕機耕幅為360mm,設計肥料箱的外形長度為0.36m。為保證肥料釋放,出料孔設計為長腰孔,要求腰孔寬度略大于肥料顆粒直徑,保證出料不造成擁堵。設計出料口腰孔寬度為0.810-3m,長度為肥料箱外形長度與壁厚的差值,0.356m,兩排腰孔,中間間隔0.410-3m。假設肥料箱寬度為0.28m,與聯軸器傾斜角度相同,底板傾斜角度為25°,則肥料箱下方閑置三棱柱空間所占體積V為:

肥料箱總體積為:
V=V肥+V空=1.7×10-2m3
根據體積與邊長的關系,可求得肥料箱高度為:
考慮到施肥滾子在肥料箱中占一部分體積,將肥料箱的高度調整為h=0.18m。
綜上所述,肥料箱的外形尺寸設計為0.36m×0.28m×0.18m。
以樹冠直徑1.2m 的果樹為例,根據果農施肥經驗,6-7 月份南豐蜜桔每棵果樹的施肥量為1kg,則施肥密度為:
已知微耕機作業前進速度v0=0.3m/s,耕幅lg=0.36mm,作業效率為:
η=v0·lg=0.3×0.36=0.11m2/s
施肥效率為:
η肥=ρ施·η=885×0.11=97g/s
已知行走輪直徑d車=0.4m,行走輪的轉速為:

為減小機構重量,兩鏈輪的直徑相等時,兩鏈輪質量和最小,即傳動比i鏈=1。
假設施肥滾子外半徑為Rg,取滾子軸半徑為rg=7.5×103m,根據車輪軸與滾子軸傳動比關系可得:
代入數據得Rg=28mm。
綜上所述,施肥滾子的設計參數為外半徑Rg=28mm,滾子軸半徑rg=15mm,轉速n 滾子=0.12r/s,其三維圖,如圖4 所示。
圖4 施肥滾子三維圖Fig.4 The Three-Dimensional Map of Fertilized Roller
4 田間試驗
4.1 試驗方法
根據《農業機械生產試驗方法》[16],在本試驗中,分別在碎土效果、耕深穩定性、施肥均勻性三個方面進行試驗。其中:碎土效果試驗以土壤碎土率為試驗指標,來驗證所設計微耕機的碎土效果;耕深穩定性試驗以測定的平均耕深為試驗指標;施肥均勻性試驗將一定面積內拋灑的肥料質量作為施肥均勻性試驗指標[17],并與農藝要求施肥質量進行對比。在江西農業大學茶樹園進行試驗,試驗用地為紅壤,試驗面積(20×1)m,樣機試驗圖,如圖5 所示。

圖5 樣機試驗Fig.5 Prototype Test
4.2 碎土效果測定
在試驗區對角線上取5 個點,在每個檢測點處取測定面積(0.5×0.5)m,高度方向為整個耕作土層,碎土率為最大邊長小于4cm 的土塊質量與檢測區域土壤質量百分比,碎土率的平均值為5 個點處碎土率平均值。
計算公式如下:

式中:si—i 點碎土率;
mai—i 點最大邊長小于4cm 的土塊質量;
mi—i 點檢測區域土壤質量。
平均碎土率為:

4.3 耕深穩定性
順著作業方向,取一基準線,在基準線上,每隔0.5m 取一檢測點,測試兩個來回,共20 個點,耕深直接使用耕深尺進行量取。則耕深平均值計算公式為:

式中:hj—點處耕深;
h—所有檢測點平均耕深;
k—檢測點個數。
4.4 肥料均勻性
使用碎土率測定取點位置,在每個檢測點處取測定面積(0.5×0.5)m,收集測定面積處所有肥料顆粒并稱重。在檢測點測定面積內,農藝要求施肥量為施肥密度與測定面積的乘積,為21g。
4.5 試驗結果與分析
參照上述試驗步驟,安排試驗,試驗結果,如圖6 所示。
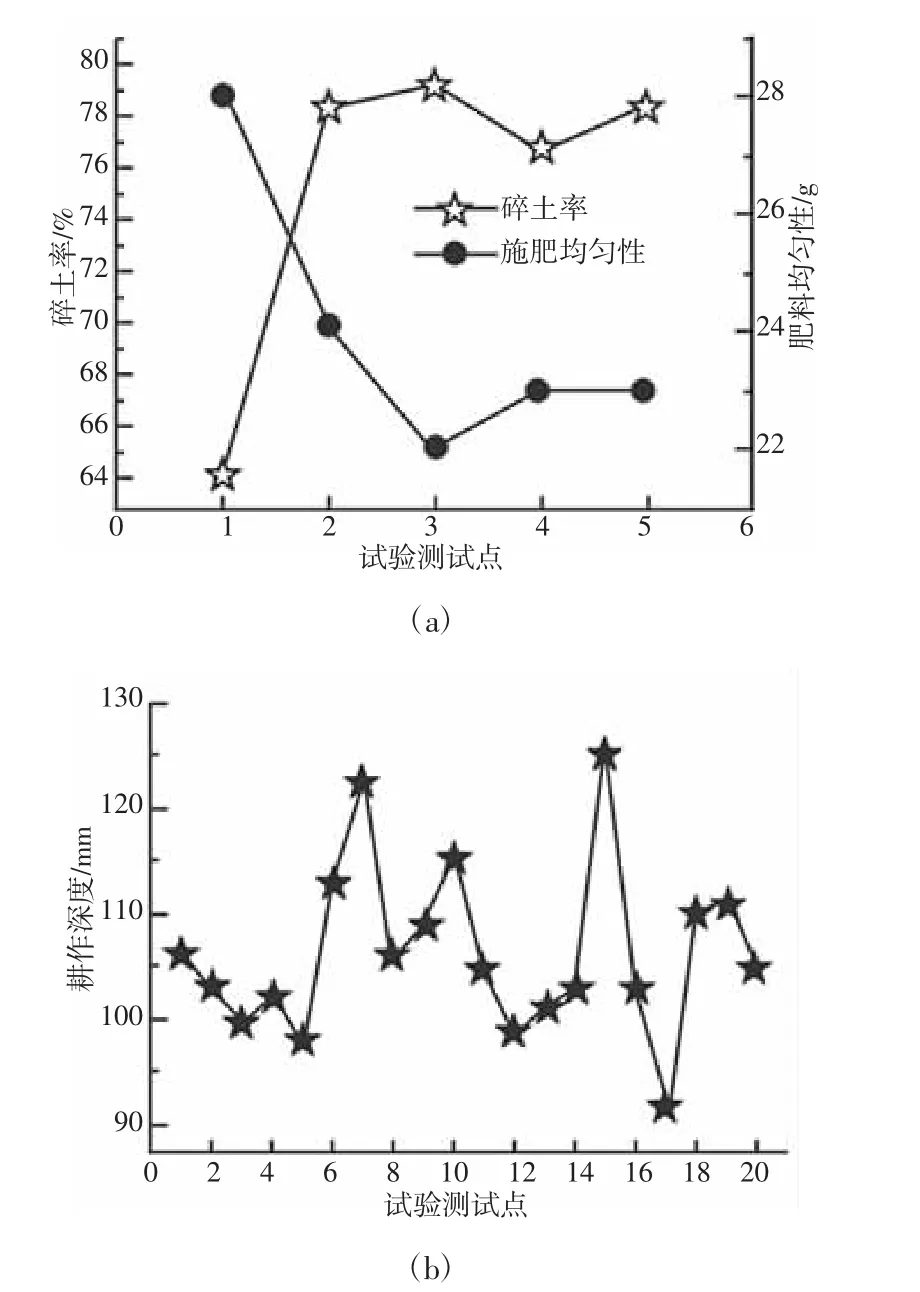
圖6 試驗結果Fig.6 Experimental Results
根據以上測得數據,求得各項目參數值,如表2 所示。可知,所設計的微耕機作業碎土率符合微耕機作業標準要求。但耕深標準偏差在相關國家標準中,并無標準要求,僅能通過該數據來判斷耕深穩定的程度,實際作業耕深平均值為106mm,與需求耕深100mm 非常接近,故認為耕深穩定性較好,滿足作業要求。肥料均勻性在相關國家標準中,無標準要求,在測定面積內,施肥量24g 與農藝要求21g 較接近,故認為滿足施肥均勻性較好,滿足施肥要求。
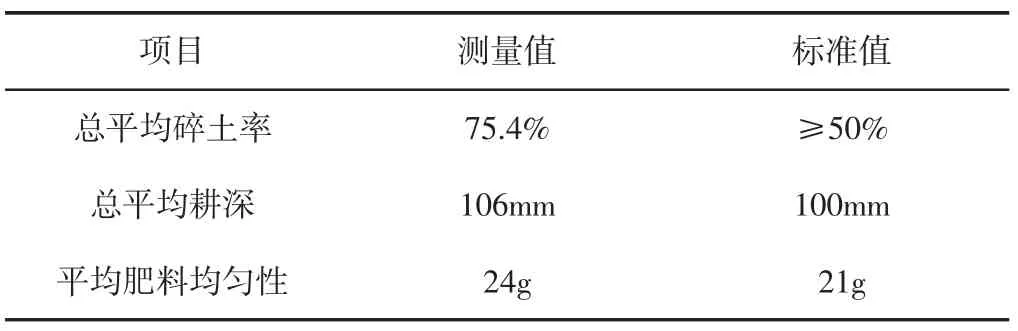
表2 微耕機作業效果參數Tab.2 Working Effect Parameters of Micro-Cultivator
5 結論
(1)研制了一種適合立式微耕機的耕深控制機構,該機構三個螺旋刀在高度方向相互獨立,每把螺旋刀都能根據自身作業處的地面起伏情況,自動調節高度,保證了山地起伏地面耕深穩定。結合農藝要求,設計出了一種結構簡單,操作簡單,重量較小的自動施肥機構,理論計算表明所設計的機構既能滿足農藝施肥量要求,又具備施肥均勻的特點。
(2)將所設計的立式微耕機進行田間試驗,并獲得作業效果的相關數據,與國家標準要求及農藝要求對比,微耕機能夠滿足丘陵山區低矮樹型果園的作業要求。
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
現代裝飾(2020年7期)2020-07-27 01:27:42
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
故事大王(2016年7期)2016-09-22 17:30:08
兒童故事畫報(2013年3期)2013-06-24 05:40:30
