基于LabVIEW的三維磁場與磁力測試系統(tǒng)
2021-02-27 03:23:58陳章龍陳博行方衛(wèi)強(qiáng)張凌飛
實(shí)驗(yàn)室研究與探索 2021年1期
陳章龍, 馬 俊, 陳博行, 方衛(wèi)強(qiáng), 張凌飛
(1.廣東茂名農(nóng)林科技職業(yè)學(xué)院機(jī)電工程系,廣東茂名,525000;2.青海師范大學(xué)計(jì)算機(jī)學(xué)院,西寧810008)
0 引 言
銅氧化物系列高溫超導(dǎo)體因其具有良好的物理性能,在磁懸浮搬運(yùn)系統(tǒng)和磁懸浮軌道交通等領(lǐng)域具有廣泛應(yīng)用[1-3],是目前最有希望作為超導(dǎo)磁懸浮實(shí)用化的材料之一,其和永磁體之間的磁懸浮力特性是超導(dǎo)磁懸浮系統(tǒng)設(shè)計(jì)和應(yīng)用的基礎(chǔ),直接決定了超導(dǎo)磁懸浮技術(shù)的成熟程度。磁場與磁力測量技術(shù)是研究磁懸浮力特性的重要技術(shù)手段,通過先進(jìn)的測量技術(shù)獲得高質(zhì)量的實(shí)驗(yàn)數(shù)據(jù),并對(duì)測量結(jié)果進(jìn)行分析,根據(jù)分析結(jié)果,揭示關(guān)鍵的磁場和磁力變化規(guī)律,更科學(xué)地研究高溫超導(dǎo)機(jī)理,為高溫超導(dǎo)磁懸浮系統(tǒng)走向?qū)嶋H應(yīng)用奠定基礎(chǔ)。研究先進(jìn)的磁場和磁力測試技術(shù)對(duì)促進(jìn)高溫超導(dǎo)磁懸浮的實(shí)用化發(fā)展,提供可靠的工具支撐,有著重要的意義。目前國內(nèi)外的磁場與磁力測試系統(tǒng),多數(shù)只能實(shí)現(xiàn)常溫下一維、二維、靜止單點(diǎn)測量,并且測量參數(shù)單一[4-6],這些測量方法,無法全面正確地揭示測試對(duì)象的磁場與磁力狀況,難以滿足連續(xù)多點(diǎn)的磁場與磁力測量要求,適應(yīng)不了高溫超導(dǎo)磁懸浮研究領(lǐng)域的三維動(dòng)態(tài)測試趨勢。針對(duì)這些不足,利用NI PCIe-6341 采集控制卡和自行設(shè)計(jì)的傳感器三維機(jī)械結(jié)構(gòu),進(jìn)行多通道、多傳感的三維數(shù)據(jù)高速采集和處理,利用LabVIEW外掛的PID控制工具包實(shí)現(xiàn)增量式PID算法,通過調(diào)用PID控制器子程序,準(zhǔn)確算出轉(zhuǎn)速增量、輸出增量對(duì)應(yīng)的PWM 波,按設(shè)定的運(yùn)動(dòng)模式控制受控驅(qū)動(dòng)電動(dòng)機(jī)的運(yùn)動(dòng),帶動(dòng)數(shù)據(jù)采集子系統(tǒng),實(shí)現(xiàn)運(yùn)動(dòng)控制與數(shù)據(jù)采集的同步運(yùn)行,快速完成測試對(duì)象宏觀磁性的三維動(dòng)態(tài)測試任務(wù),為高溫超導(dǎo)機(jī)理研究提供科學(xué)依據(jù)。
1 系統(tǒng)總體設(shè)計(jì)
系統(tǒng)上位機(jī)選用LabVIEW 平臺(tái)開發(fā),下位機(jī)以PCIe-6341 數(shù)據(jù)采集卡作為下位機(jī)核心處理器。其中,下位機(jī)包括傳感器信息采集和運(yùn)動(dòng)控制兩部分,信息采集主要通過在x、y、z軸上分別設(shè)置3 個(gè)磁場傳感器和3 個(gè)磁力傳感器完成對(duì)模擬信號(hào)的采集,經(jīng)過NI信號(hào)調(diào)理設(shè)備進(jìn)行濾波放大,送進(jìn)PCIe-6341 完成A/D轉(zhuǎn)換和進(jìn)一步計(jì)算處理,通過PCIe總線將數(shù)據(jù)傳輸?shù)缴衔粰C(jī);運(yùn)動(dòng)控制通過PCIe-6341 主控模塊產(chǎn)生相應(yīng)頻率的步進(jìn)電機(jī)控制波PWM,以實(shí)現(xiàn)受控驅(qū)動(dòng)步進(jìn)電機(jī)帶動(dòng)傳感器在測量范圍內(nèi)運(yùn)動(dòng)的目的,同時(shí),在系統(tǒng)加入反饋支路,實(shí)時(shí)監(jiān)測步進(jìn)電機(jī)運(yùn)動(dòng)狀態(tài),與PCIe-6341 實(shí)現(xiàn)運(yùn)動(dòng)的閉環(huán)控制;上位機(jī)可實(shí)現(xiàn)對(duì)采集數(shù)據(jù)的實(shí)時(shí)動(dòng)態(tài)展示及存儲(chǔ),同時(shí),上位機(jī)具備精確運(yùn)動(dòng)控制和高速數(shù)據(jù)采集。系統(tǒng)的總體結(jié)構(gòu)如圖1 所示。

圖1 系統(tǒng)的總體結(jié)構(gòu)
2 傳感器的三維結(jié)構(gòu)
2.1 磁場傳感器的三維結(jié)構(gòu)
選用HGA-3030 磁場傳感器,工作溫度范圍可達(dá)-273.15 ~100 ℃,即使在液氮低溫環(huán)境下都可以正常啟動(dòng)工作。三維結(jié)構(gòu)選用3 片靈敏度相同的磁場探頭,每片磁場探頭的感應(yīng)區(qū)域?yàn)?.2 mm ×0.2 mm,將這3 片探頭先后放置在左平面(X)、前平面(Y)、底平面(Z)三個(gè)維度上,互相成90°排列,組成體積為0.2 mm×0.2 mm×0.2 mm的立方體,通過該三維結(jié)構(gòu)的磁場探頭,即可同時(shí)測得待測對(duì)象某點(diǎn)磁感應(yīng)強(qiáng)度在3 個(gè)方向上的分量。
2.2 磁力傳感器的三維結(jié)構(gòu)
磁力測量采用具有金屬電阻應(yīng)變效應(yīng)的SLS410模擬式稱重傳感器。在緊貼三維磁場探頭處安裝L形中空測試盒,將3 塊靈敏度相同的磁力傳感器,分別放置在測試盒直角頂點(diǎn)處空心立體的右側(cè)(X)、前側(cè)(Y)、頂側(cè)上表面(Z)中心位置。3 個(gè)磁力傳感器互相成90°分布在同一測量點(diǎn)的三個(gè)維度,形成三維布置,通過各軸磁力傳感器,可同時(shí)測出磁性材料之間的磁力在三維空間的分布。
3 下位機(jī)軟件
系統(tǒng)下位機(jī)軟件主要由主控板卡的驅(qū)動(dòng)、傳感器模塊的數(shù)據(jù)采集、運(yùn)動(dòng)控制、信號(hào)調(diào)理板卡驅(qū)動(dòng)等程序構(gòu)成。
3.1 主控板卡的驅(qū)動(dòng)程序
PCIe-6341 主控板卡的驅(qū)動(dòng)程序下位機(jī)系統(tǒng)軟件的核心,它往上為上位機(jī)界面程序提供API函數(shù)接口,往下通過寄存器訪問主控板卡。驅(qū)動(dòng)程序通常遵循先軟件后硬件的原則,主要分為3 個(gè)步驟:
步驟1啟動(dòng)NI-DAQmx9.1.7 安裝程序,完成光盤安裝;
步驟2啟動(dòng)MAX工具選擇物理通道和配置NIDAQmx任務(wù);
步驟3設(shè)置DAQ 助手完成主控板卡硬件資源的分配并測試NI-DAQmx 任務(wù),以確認(rèn)是否正確配置及按功能運(yùn)行,開發(fā)流程圖略。
3.2 增量式PID算法的參數(shù)整定
為對(duì)測試平臺(tái)進(jìn)行實(shí)時(shí)運(yùn)動(dòng)控制,本設(shè)計(jì)采用增量式PID算法進(jìn)行閉環(huán)控制:

式中:ΔUi為控制增量;KP、KI和KD分別為比例、積分和微分參數(shù);ei-2、ei-1和ei分別是第i -2 次、第i -1次和第i次反饋采樣時(shí)的偏差值[7-8]。
由式(1)可知,當(dāng)主控板卡的反饋采樣周期恒定時(shí),一旦該模型的3 個(gè)參數(shù)值KP、KI和KD確定后,只要連續(xù)測出前后3 次的速度偏差值ei-2、ei-1和ei,即可得到控制增量。該算法的核心是調(diào)出最優(yōu)的3 個(gè)參數(shù)值。在PID參數(shù)整定過程中,采用試湊法[9],通過步長和步數(shù)設(shè)定電動(dòng)機(jī)的運(yùn)動(dòng)位移為橫向?qū)挾?0 mm,并給定目標(biāo)轉(zhuǎn)速為10 r/s,對(duì)應(yīng)速度值為20 mm/s;根據(jù)工程經(jīng)驗(yàn),設(shè)置不同的PID經(jīng)驗(yàn)參數(shù),啟動(dòng)測試卡具在水平面內(nèi)沿直線往返運(yùn)動(dòng),在不同的PID 參數(shù)調(diào)節(jié)下,通過將編碼器反饋回來的速度值保存在工控機(jī)的文檔中,利用Matlab軟件繪出不同PID參數(shù)下的速度響應(yīng)曲線,在現(xiàn)場試驗(yàn)中不斷地調(diào)整修正,逐步確定PID控制器的3 個(gè)參數(shù),直至得到滿意的輸出為止,經(jīng)過反復(fù)調(diào)試和修正,最后采用一組最佳的PID參數(shù),KP=19.12,KI=4.67,KD=0.03,其速度響應(yīng)曲線如圖2 所示。由圖2 可見,運(yùn)動(dòng)控制的超調(diào)量是20%,調(diào)節(jié)時(shí)間是150 ms,穩(wěn)態(tài)誤差是±0.5%,150 ms后實(shí)際速度基本與目標(biāo)速度相同,最大偏差小于0.1 mm,控速精度為±0.1 mm,滿足測試系統(tǒng)運(yùn)動(dòng)控制的要求。
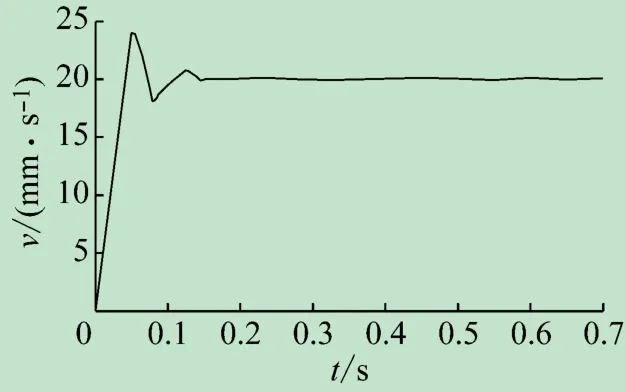
圖2 速度響應(yīng)曲線
3.3 運(yùn)動(dòng)控制模塊的程序
為保證轉(zhuǎn)速測量的準(zhǔn)確性以及PWM 調(diào)節(jié)電動(dòng)機(jī)轉(zhuǎn)速的有效性,采用了定時(shí)中斷技術(shù),在定時(shí)器中斷服務(wù)子程序中完成轉(zhuǎn)速的計(jì)算、增量式PID 算法的實(shí)現(xiàn)和PWM 調(diào)節(jié)電機(jī)轉(zhuǎn)速等功能,其程序流程如圖3所示。

圖3 運(yùn)動(dòng)控制程序流程
首先打開主控板卡的總中斷,啟動(dòng)定時(shí)器和各軸計(jì)數(shù)器,定時(shí)50 ms,各軸計(jì)數(shù)器接收到編碼器的反饋脈沖信號(hào)并累加統(tǒng)計(jì),直至定時(shí)到達(dá)50 ms,進(jìn)入定時(shí)中斷,根據(jù)統(tǒng)計(jì)的脈沖總數(shù),計(jì)算出各軸電動(dòng)機(jī)的實(shí)際轉(zhuǎn)速和轉(zhuǎn)速偏差,若偏差大于0.1 mm,則將偏差送入增量式PID 模型進(jìn)行運(yùn)算處理,進(jìn)一步再通過PWM調(diào)節(jié)轉(zhuǎn)速模塊,完成電動(dòng)機(jī)轉(zhuǎn)速的調(diào)節(jié),最后初始化各軸計(jì)數(shù)器和定時(shí)器,重新定時(shí)50 ms,只要偏差仍大于指標(biāo)要求,就一直進(jìn)行以上循環(huán),不斷調(diào)節(jié)轉(zhuǎn)速。若轉(zhuǎn)速偏差小于指標(biāo)要求,則退出本模塊程序,進(jìn)入數(shù)據(jù)采集子程序。
4 上位機(jī)軟件
本系統(tǒng)的上位機(jī)部分是以“LabVIEW2012”作為開發(fā)平臺(tái),由前面板界面和后面板程序框圖兩部分組成[10-15],其開發(fā)過程采用模塊化、層次化和層層遞進(jìn)式的設(shè)計(jì)思想,并融合子VI技術(shù),將其分解成主程序、登錄管理、標(biāo)定前手動(dòng)移位、手動(dòng)定位原點(diǎn)、移至測量起點(diǎn)、啟動(dòng)數(shù)據(jù)采集、保存數(shù)據(jù)、運(yùn)動(dòng)軌跡設(shè)置和緊急停止等模塊。每個(gè)功能模塊都對(duì)應(yīng)著一個(gè)或者多個(gè)子VI,在這9 個(gè)功能模塊中,主程序模塊設(shè)置為頂層VI,并保存為main.vi 文件,作為上位機(jī)軟件執(zhí)行的入口點(diǎn),剩余的每個(gè)功能模塊都是由多個(gè)子VI組成的次頂層VI,頂層VI 與次頂層VI 之間,存在先后執(zhí)行步驟的次序關(guān)系,首先從頂層的main.vi 開始執(zhí)行,然后再從次頂層的登錄管理VI、第1 步(手動(dòng)定位原點(diǎn))VI一直執(zhí)行到保存數(shù)據(jù)VI,從通過執(zhí)行步驟的先后關(guān)系,層層調(diào)用不同的子VI,實(shí)現(xiàn)預(yù)定先后的操作順序和整個(gè)上位機(jī)系統(tǒng)的功能。圖4 為上位機(jī)功能模塊結(jié)構(gòu)圖,圖5 為上位機(jī)程序流程圖。圖5 中,Login 操作為觸發(fā)登錄控件,MTSet 為運(yùn)動(dòng)軌跡設(shè)置命令,CM 為手動(dòng)移位命令,Step1 為手動(dòng)定位原點(diǎn)命令。
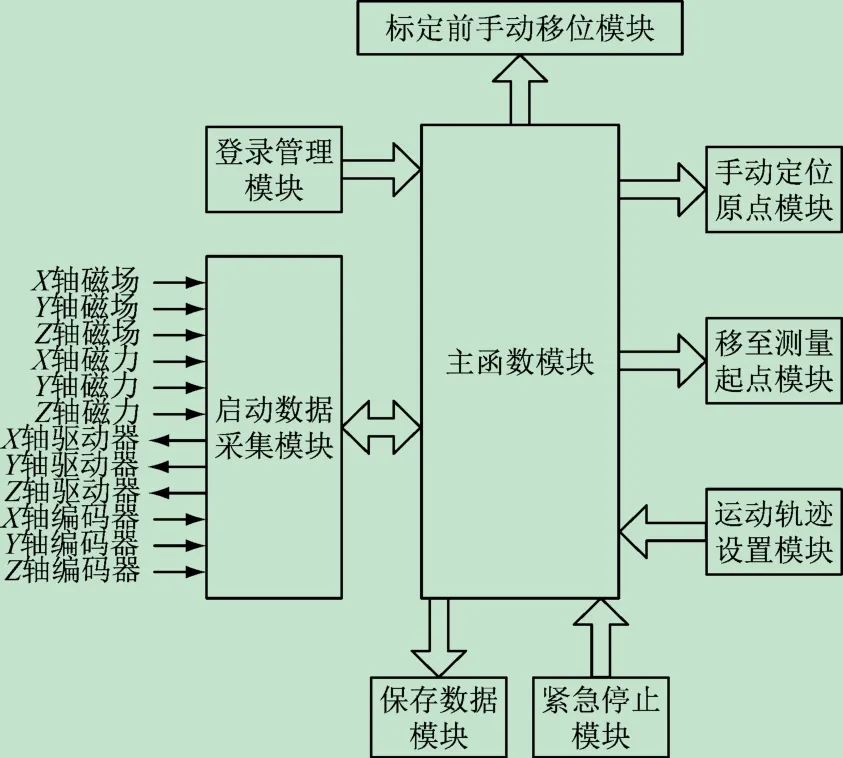
圖4 上位機(jī)功能模塊結(jié)構(gòu)
4.1 上位機(jī)前面板設(shè)計(jì)
上位機(jī)前面板由用戶登錄管理、標(biāo)定前手動(dòng)移位、運(yùn)動(dòng)軌跡設(shè)置、啟動(dòng)數(shù)據(jù)采集前、啟動(dòng)數(shù)據(jù)采集、保存數(shù)據(jù)和緊急停止等界面組成,整個(gè)開發(fā)過程通過調(diào)用I/O函數(shù)庫、計(jì)數(shù)器/定時(shí)器操作函數(shù)、各輸入控件和顯示控件來完成。其前面板界面圖略。

圖5 上位機(jī)程序流程圖
4.2 上位機(jī)程序框圖
在上位機(jī)程序框圖設(shè)計(jì)中,采用由頂向下和細(xì)分模塊的設(shè)計(jì)方法,通過開發(fā)一系列的子VI,每一個(gè)子VI完成對(duì)應(yīng)模塊的功能,子VI 與子VI 之間環(huán)環(huán)相扣,共同完成整個(gè)上位機(jī)的功能。簡要的開發(fā)過程如下:在程序框圖的最外層使用平鋪式順序結(jié)構(gòu),將順序結(jié)構(gòu)設(shè)置為4 幀,并從第1 幀到第4 幀依次先后分別命名為初始化控件、讀取系統(tǒng)設(shè)置與說明信息、讀取運(yùn)動(dòng)軌跡設(shè)置信息和主控循環(huán)。其中,主控循環(huán)這一幀的程序框圖又劃分為用戶登錄管理、測量通道標(biāo)定、手動(dòng)移位操作、運(yùn)動(dòng)軌跡設(shè)置、定位原點(diǎn)和和移至測量起點(diǎn)、啟動(dòng)數(shù)據(jù)采集、保存數(shù)據(jù)和緊急停止子程序7 部分。部分程序框圖如圖6 所示。
5 系統(tǒng)測試
為了驗(yàn)證系統(tǒng)在動(dòng)態(tài)測量方面的可靠性、處理采集數(shù)據(jù)的實(shí)時(shí)性、運(yùn)動(dòng)控制和數(shù)據(jù)采集同步運(yùn)行的穩(wěn)定性,在實(shí)驗(yàn)室環(huán)境下分別對(duì)空心圓柱形永磁體的三維磁場、超導(dǎo)體與永磁體之間的三維磁力進(jìn)行了實(shí)際測試,具體測試流程如下:
(1)首先,進(jìn)行磁場測試,選用外徑為45 mm,內(nèi)徑為5 mm的空心圓柱形永磁體作為測試對(duì)象;
(2)接線組裝搭建測試系統(tǒng),開啟系統(tǒng)各模塊供電開關(guān);
(3)啟動(dòng)main.vi主程序,運(yùn)行上位機(jī)軟件,按照預(yù)定的操作步驟,操作上位機(jī)界面的各控件按鈕,測試機(jī)構(gòu)的三維霍爾探頭以Z型的運(yùn)動(dòng)軌跡、設(shè)定10 mm/s的運(yùn)動(dòng)速度、2 mm/ s的采集速度,在距測試對(duì)象上表面1 mm處的50 mm×50 mm的掃描平面內(nèi)進(jìn)行三維磁場測量試驗(yàn),掃描結(jié)束后,保存數(shù)據(jù)至Excel 表,并利用Matlab軟件進(jìn)行數(shù)據(jù)處理,處理后的分布結(jié)果如圖7 所示。

圖6 部分程序框圖

圖7 距空心圓柱形永磁體上表面1mm的掃描平面內(nèi)磁場分布圖
(4)進(jìn)行磁力測試,選用直徑為20 mm,厚度為12 mm的單疇GdBCO超導(dǎo)體和外徑為45 mm,內(nèi)徑為2 mm的空心圓柱形永磁體作為測試對(duì)象;
(5)往超導(dǎo)體容器內(nèi)連續(xù)倒入液氮,大約10 min后,超導(dǎo)體被冷卻至77 K 超導(dǎo)態(tài),此時(shí)讓測試機(jī)構(gòu)的磁力傳感器從垂直高度距超導(dǎo)體50 mm的初位置處,沿著超導(dǎo)體的中心軸線向下運(yùn)動(dòng)至距超導(dǎo)體的垂直高度為2 mm 時(shí),反方向返回至初位置,運(yùn)動(dòng)結(jié)束后,保存數(shù)據(jù)至Excel 表,并利用Origin 軟件對(duì)Z 軸磁力數(shù)據(jù)進(jìn)行處理,處理后的結(jié)果如圖8 所示。
無論是磁場測試,還是磁力測試,在整個(gè)試驗(yàn)過程中,系統(tǒng)運(yùn)行非常穩(wěn)定,觀察到上位機(jī)軟件的各功能模塊均正常運(yùn)行,效果明顯。圖9 為上位機(jī)界面的運(yùn)行效果,下位機(jī)的實(shí)現(xiàn)圖略。
6 結(jié) 語

圖8 空心圓柱形永磁體與超導(dǎo)體之間的磁力與垂直高度的關(guān)系曲線

圖9 上位機(jī)運(yùn)行界面
本文根據(jù)超低溫環(huán)境下三維磁場與磁力測試的具體要求,利用運(yùn)動(dòng)控制技術(shù)和三維測試技術(shù),通過PCIe-6341 和LabVIEW軟硬結(jié)合的方式,設(shè)計(jì)了數(shù)據(jù)采集與運(yùn)動(dòng)控制協(xié)同工作的三維磁場與磁力測試系統(tǒng),經(jīng)過實(shí)驗(yàn)測試和數(shù)據(jù)分析,系統(tǒng)既能對(duì)測試機(jī)構(gòu)進(jìn)行運(yùn)動(dòng)控制,也能同步進(jìn)行三維磁性信息的動(dòng)態(tài)多點(diǎn)連續(xù)采集,系統(tǒng)運(yùn)動(dòng)控制的魯棒性較高且測試結(jié)果具有一定的精度,滿足國標(biāo)要求。相比于傳統(tǒng)的嵌入式系統(tǒng)設(shè)計(jì)方法,本系統(tǒng)的開發(fā)周期短,性價(jià)比高,維護(hù)方便,通用性和可擴(kuò)展性好,在宏觀磁性測量領(lǐng)域中有很好的使用價(jià)值,并且可以加入融合神經(jīng)網(wǎng)絡(luò)的自適應(yīng)PID控制方法,使系統(tǒng)的運(yùn)動(dòng)控制更加智能化。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
當(dāng)代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
中學(xué)生數(shù)理化·高二版(2016年12期)2017-02-28 10:08:42