三相供電交流電機驅動系統無電解電容控制技術綜述*
2021-02-15 12:22:08丁大尉王高林張國強徐殿國
電氣工程學報 2021年4期
關鍵詞:系統
丁大尉 王高林 張國強 徐殿國
三相供電交流電機驅動系統無電解電容控制技術綜述*
丁大尉 王高林 張國強 徐殿國
(哈爾濱工業大學電氣工程及自動化學院 哈爾濱 150001)
隨著永磁電機驅動控制技術的發展,系統可靠性、壽命和功率密度逐漸成為該領域關注的重點。三相供電交流電機無電解電容驅動系統具有體積小、壽命長、可靠性高的優點,是高品質電機驅動系統發展的重要方向之一。目前,交流電機無電解電容驅動系統已經在工業領域得到應用。圍繞驅動系統穩定運行和機側性能控制技術兩方面,對交流電機無電解電容驅動系統的發展現狀進行歸納和總結,指出現有方案的優缺點。最后,對交流電機無電解電容驅動系統目前亟需解決的難點問題和未來發展趨勢進行總結和展望。
交流電機;無電解電容驅動系統;穩定性控制;機側性能控制
1 引言
交流電機驅動系統廣泛應用于工業領域,但是其直流側電解電容體積大、壽命短且存在爆炸風險。近年來,交流電機驅動系統無電解電容控制技術得到了廣泛關注,目前市場上采用無電解電容交流電機驅動方案的主要有西門子SED2、施耐德ATV212等,國內企業如美的、英威騰等正在加快無電解電容交流電機驅動系統的開發和應用。無電解交流電機驅動系統采用小容值薄膜電容替換原有的大容值電解電容,電容容值可降為原來的1/50左右。隨著直流側電容容值的降低,母線電壓大幅波動,網側和機側能量嚴重耦合,給電機驅動系統帶來一系列問題。
首當其沖的是驅動系統穩定性問題,為了防止開關頻率相關的高頻諧波電流饋入電網,增加公共點處諧波,無電解電容電機驅動系統通常需要適配一定量的直流或者三相交流電抗器[1-4]。交流電機可視為恒功率負載,其呈現負阻抗特性[5-9]。由于小容值薄膜電容幾乎不具備能量緩沖作用,網側和機側能量直接耦合,電機的負阻抗特性和LC諧振的存在將導致系統中諧振頻率處諧波的放大,在弱電網情況下甚至會出現系統失穩的情況[10-12]。因此,系統穩定性控制作為三相供電無電解電容電機驅動系統的核心問題被廣泛研究[13-17]。
在機側性能方面,現有的過調制以及弱磁控制策略大多基于恒定母線電壓進行設計,因此在無電解電容電機驅動系統中難以獲得理想的效果[18-22]。如何提升母線電壓利用率、降低電機電壓畸變,設計適合無電解電容電機驅動系統的過調制和弱磁控制策略是研究難點之一[23-26]。由于母線電壓采樣延遲的存在,其周期性波動導致電機電流諧波,導致機側電流含有非運行頻率整數倍諧波。此時機側相電流將呈現拍頻現象,從而增加電機噪聲[27]。此外,當電機負載周期性變化時,也會導致拍頻問題[28]。拍頻是電力電子系統的普遍問題之一[29-32],在電機驅動和在無電解電容電機驅動系統中也受到較多關注[33-36]。電機驅動系統通常需要配備制動單元,防止制動過程中的母線過壓[37]。在無電解電容電機驅動系統中,由于母線電容的進一步降低,更易發生母線過壓的情形[38-39]。同樣,無電解電容電機驅動系統也對低電壓穿越有更高的控制要求[40]。因此,在無電解電容驅動系統中,如何有效控制再生能量是值得關注的應用問題[41-43]。
本文將從三相供電交流電機無電解電容驅動系統穩定運行和機側性能控制兩方面進行闡述,首先對現有穩定性控制的方法進行歸類,并對方法的特點、實施方式以及性能等方面進行評述。此外,介紹母線電容大幅降低后對機側性能的控制要求,主要包括擴速運行、拍頻抑制、再生能量控制三個方面。在此基礎上,對三相供電交流電機驅動系統無電解電容控制技術未來的發展方向進行探討和 展望。
2 驅動系統穩定性控制方法
由于電機恒功率特性以及LC諧振的影響,無電解電容驅動系統容易產生失穩的問題[44]。三相供電無電解電容驅動系統拓撲如圖1所示。其可簡化為如圖2所示模型[45],驅動系統狀態方程可表示為
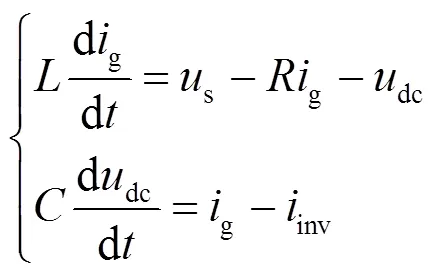
式中,us、ig、udc和iinv分別表示網側電壓、電感電流、母線電壓和逆變器輸出電流。L、R、C分別表示直流側電感、線路電阻以及母線電容。

圖2 無電解電容電機驅動系統簡化模型
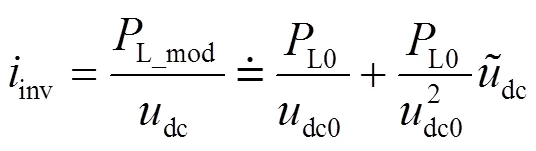
逆變器及電機系統呈現恒功率負載特性。忽略開關損耗前提下,逆變器輸出的平均功率和電機平均功率相等,逆變器平均輸出電流可以表示為


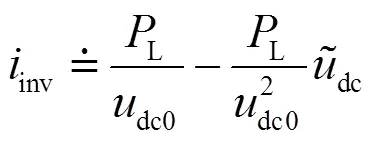
由式(3)可以看出,母線電壓波動和逆變器輸出電流諧波呈相反的變化趨勢,電機呈現負阻抗特性。
根據式(1)和式(3),可以獲得系統特征方程為
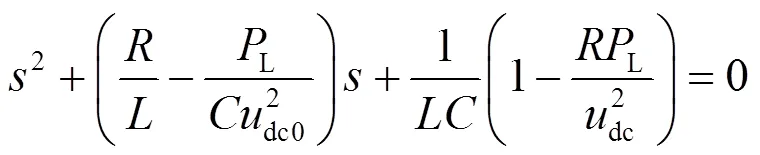
特征方程第三項系數通常為正,系統穩定性由第二項系數決定,即穩定條件為

在無電解電容電機驅動系統中,由于電容容值極小,當電機功率或者市電阻抗較大時,系統將面臨失穩問題。提升驅動系統穩定性是無電解電容電機驅動系統面臨的核心問題。目前,常用的方法主要包括:改變電機負阻抗特性的穩定性控制方法、基于并聯虛擬阻抗的穩定性控制方法以及改變驅動系統拓撲。無論是改變電機負阻抗特性的穩定性控制方法,還是基于并聯虛擬阻抗的穩定性控制方法,均通過改變電機的功率實現。
2.1 改變電機負阻抗特性的穩定性控制方法
通過改變電機電流或者電壓指令,在電機中注入母線電壓波動相關的擾動功率,可以改變電機負阻抗特性,從而達到提升無電解電容電機驅動系統穩定性的目的,具體實現方法總結如圖3所示。逆變器輸出電流可統一表示為



擾動功率可表示為

將式(8)代入式(7)中可得

式中,系數為id、iq、ud、uq的統一表達。
給定合理的值,可以將式(9)中第二項系數變為正值,即改變電機的負阻抗特性。與之對應的系統特征方程如式(10)所示,對比式(4)可以發現,改變電機負阻抗特性后,系統特征方程第二項系數為正值,即可實現驅動系統穩定控制。
在調制模塊中直接將母線電壓諧波反向,可以將電機轉化為正阻抗特性。具體實現方法如圖4所示,將母線電壓諧波反向用于調制模塊后,電機電壓可表示為
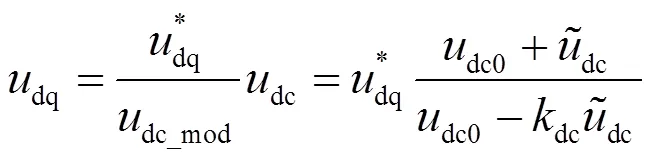
式中,dc_mod為將母線電壓諧波反向后的電壓指令;dc為諧波系數。
電機功率可表示為

由此,可以獲得逆變器輸出電流表達式為
對比式(3)和式(13)可知,此時的電機表現正阻抗特性。基于圖4的思路,丹佛斯公司MATHE等[7-8]將母線電壓諧波延遲半個周期后獲得母線電壓重構值,并對母線電壓采樣延遲進行了補償。奧爾堡大學WANG等[9]將母線電壓波動部分反向用于調制模塊,可以實現系統穩定控制。為了進一步提升阻尼控制效果,WANG等[10]利用鎖相環重構整流電壓,僅將母線電壓中被諧振放大的諧波分量反向。
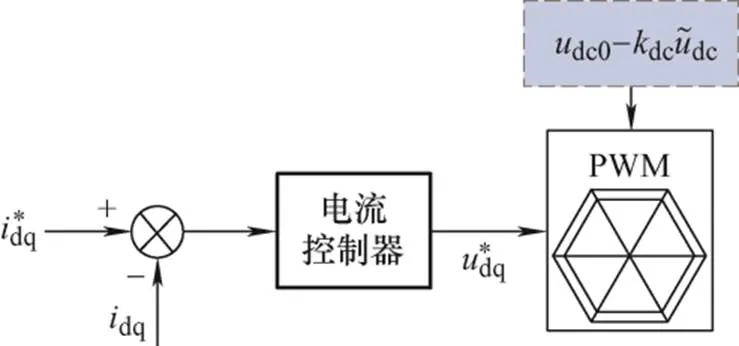
圖4 虛擬正阻抗穩定性控制方法
以上方案以經典控制理論穩定條件為基礎,利用母線電壓諧波建立合理的反饋控制環路改變電機負阻抗特性,提升了驅動系統穩定性。但是在實際應用中也存在各自的問題,基于電流指令調節的控制策略難以實現準確的功率調節,因此阻尼控制效果較差。基于電壓指令調節的控制策略,可能會產生較為嚴重的過電流問題。目前,也有方案通過改變電機轉矩或者轉速指令調節電機功率,達到系統穩定的目的,但是其本質上與基于電流或者電壓指令的方案類似。
2.2 基于并聯虛擬阻抗的穩定性控制方法
并聯虛擬阻抗的穩定性控制方法物理意義明確,廣泛應用于并網逆變器,可以有效抑制LCL諧振尖峰,提高驅動系統穩定性[46-49]。與之類似,并聯虛擬阻抗的有源阻尼方法同樣適用于無電解電容電機驅動器。
在交流電機無電解電容驅動系統中,虛擬阻抗的并聯方式通常有以下幾種,如圖5所示。首爾大學LEE等[11]提出一種在電感兩端并聯虛擬電阻的有源阻尼控制方案,如圖5a所示,利用整流電壓和母線電壓差生成阻尼電流,與此同時,設計了一種龍貝格觀測器獲得整流電壓,為了減小阻尼控制帶來的電機功率擾動,將阻尼電壓加在電機電流矢量方向。圖5b中,在母線電容兩端并聯虛擬電阻,本質上實際上是在電機中引入母線電壓諧波比例項。曼徹斯特大學LIU等[12]將母線電壓諧波比例項引入電機電流指令實現了驅動系統穩定控制,并分析了阻尼器參數對電機轉矩的影響。GREEN實驗室MAGNE等[13]基于圖5c的原理,提出并聯虛擬電容的穩定控制器,與此同時對加入穩定控制器前后的系統進行大信號建模,分析了不同虛擬電容容值下的吸引域。通過對系統頻域特性分析,圖5d中串聯電阻方案可以達到較好的綜合控制效果,據此哈爾濱工業大學ZHAO等[14]提出一種基于電感電流反饋的有源阻尼穩定性控制方法。

圖5 基于并聯虛擬阻抗的穩定性控制方案
通過模擬并聯無源器件,可以有效提升無電解電容電機驅動系統穩定性。但是此類方法中阻尼器參數的選擇依賴驅動系統模型,當市電阻抗寬范圍變化或者電機功率發生變化時,難以取得令人滿意的控制效果。
2.3 改變驅動系統拓撲穩定性控制方法
上述方案主要通過電機控制算法來實現無電解電容電機驅動系統的穩定控制,改變驅動系統拓撲的穩定性控制方案也得到了相應的關注。首爾大學SHIN等[15-17]在直流側并聯有源補償器(圖6),實現了驅動系統穩定控制,且根據IEC61000-3-12諧波標準對網側電流波形進行了重塑,有效降低了網側電流的部分加權諧波畸變率(Partial weighted harmonic distortion, PWHD)。改變驅動系統拓撲可以避免向電機引入擾動功率,也可以提升電機擴速和抗擾性能,但是會增加系統成本和體積,因此基于電機控制算法的穩定性控制策略更加受到青睞。

圖6 并聯補償器無電解電容電機驅動系統拓撲
3 機側運行性能控制技術
由于母線電容儲能能力的下降,母線電壓大幅波動會影響電機運行性能,造成電機轉矩脈動、電壓利用率低、母線過電壓等問題。因此,研究針對無電解電容電機驅動系統的機側運行性能控制技術十分必要。
3.1 擴速運行技術
圖7為三相輸入電壓和整流電壓,整流電壓波動幅度約為14%,其表達式如式(14)所示。整流電壓和母線電壓之間的傳遞函數如式(16)所示,由于LC諧振的存在,母線電壓諧振頻率附近諧波將被放大,母線電壓波動幅度可達20%。母線電壓的大幅波動,使得傳統的弱磁控制和過調制策略難以發揮作用。

圖7 三相輸入電壓和整流電壓關系


式中,=1,2,3,…;g表示電網電壓頻率;dN表示rect的直流部分。

在無電解電容電機驅動系統弱磁控制中,主要有以下兩個核心問題需要考慮[22]:①由于母線電壓呈周期性波動,需要采用特殊的弱磁控制策略以提升母線電壓利用率;②在弱磁控制區間,電機電磁轉矩諧波較為顯著,尤其是由電壓波動和過調制造成的電機低頻振蕩。嶺南大學KIM等[18-20]將基于模型的控制器和電壓六邊形控制器結合起來,指令電壓矢量直接由電機轉矩指令和電壓六邊形限制計算獲得。即使在母線電壓周期性波動情況下,該控制策略仍然可以實現最大的直流側電壓利用率,但是電機轉矩脈動較為嚴重。此外,該方案取消了電流環,因此對電機參數的依賴性較強。為降低弱磁控制區間內的電機轉矩脈動,阿爾托大學理工學院HINKKANEN等[21]采用母線電壓閉環的弱磁控制策略,其中弱磁控制的邊界選擇為最小母線電壓,且電壓指令未拓展至過調制區。因此,該弱磁控制策略電壓利用率較低。為了兼顧母線電壓利用率和電機轉矩脈動,首爾大學YOO等[22]利用交軸指令電壓和實際電壓之差經過低通濾波器后產生直軸去磁電流,通過價值函數的設計,取得了較好的弱磁控制性能。不同弱磁控制方法的特點如表1所示。
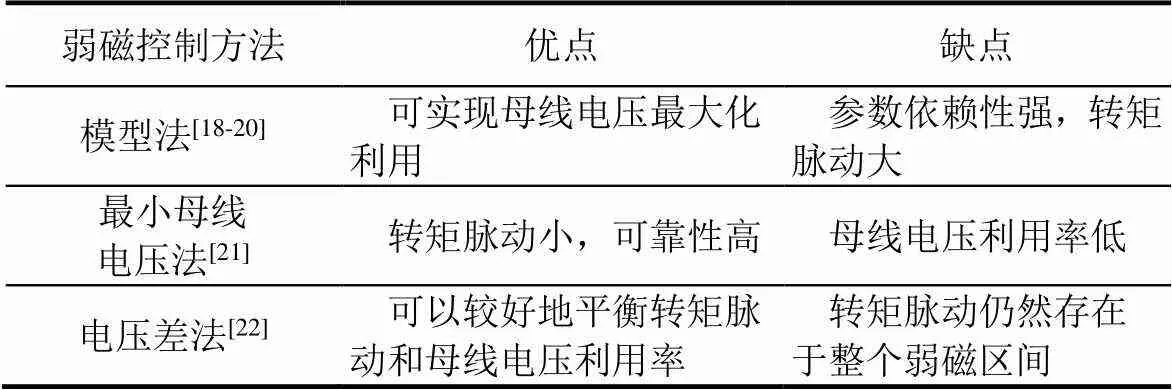
表1 不同弱磁控制方法特點
在無電解電容電機驅動系統中,由于母線電壓大范圍周期性波動,傳統的過調制策略難以取得較好的控制效果。為提升三相供電無電解電容電機驅動器的電壓輸出能力,拉普蘭塔理工大學SAREN等[23]分析了不同轉速和電壓初始角時電機電壓的諧波及有效值,設計了一種固定電壓矢量幅值過調制策略,根據母線電壓和電機電壓指令計算電壓矢量跳變角,電機電壓可以由過調制一區線性過渡到六步運行模式。為了進一步降低定子電壓諧波,哈爾濱工業大學WANG等[24]分析了傳統過調制策略在無電解電容永磁同步電機驅動系統中的電壓畸變問題,通過設定固定電壓邊界重新界定調制區域,消除了定子電壓矢量會跳畸變,有效降低了定子電壓諧波,隨著調制度的增加,定子電壓可以由線性區平滑過渡到六步運行狀態。
3.2 拍頻抑制技術
實際上,拍頻現象是電力電子系統中存在的普遍問題之一[27-30]。電力電子變換器的低頻阻抗通常較小,即使很小的低頻擾動也會造成嚴重的波形畸變。電機拍頻問題多見于軌道牽引系統,母線電壓和電機輸出電壓交互產生了低頻振蕩現象[31-33]。在無電解電容電機驅動系統中同樣存在拍頻現象,奧爾堡大學WANG等[36]對無電解電容驅動系統諧波進行了系統分析,指出母線電壓采樣延遲,將導致PWM輸出電壓誤差,在定子電流中形成母線電壓波動相關頻次諧波,導致電機電流拍頻問題。與此同時,周期性波動負載也會和母線電壓諧波交互產生拍頻現象。
圖8為常用的采樣更新及PWM時序圖,在1時刻執行母線電壓采樣,在2時刻開始PWM更新,此間母線電壓的等效延遲為1.5個開關周期。在電無電解電容電機驅動系統中,由于母線電壓大幅波動,母線電壓采樣延遲對系統影響較大。例如,當開關頻率為6 kHz時,電壓采樣誤差即可達9%,且開關頻率越低,母線電壓采樣誤差越大。為了抑制母線電壓采樣延遲造成的拍頻問題,華中科技大學OUYANG等[35]設計了一種母線電壓重復觀測器,預測下一個開關周期的母線電壓均值用于SVPWM更新,有效抑制了軌道牽引系統拍頻問題。但是在無電解電容電機驅動系統中,母線電壓并非嚴格的周期信號,重復觀測器將不能有效工作。為此,哈爾濱工業大學DING等[27]對母線電壓采樣延遲導致的拍頻問題進行了理論分析,獲得了拍頻包絡線的數學表達式,通過對母線電壓主要諧波成分進行重構,有效抑制了拍頻現象,該方案不要求母線電壓具有嚴格的周期特性,易于工程應用。

圖8 采樣更新及PWM時序圖
無電解電容電機驅動系統常用于暖通空調系統,圖9為單轉子壓縮機負載變化曲線,可以發現負載轉矩隨機械角度呈周期性變化,此時也會導致驅動系統拍頻問題。對此,哈爾濱工業大學ZHAO等[28]設計了一種基于陷波器拍頻抑制策略,通過構建電機電流和電壓之間的控制環路,有效抑制了負載波動頻次諧波,從而消除了拍頻現象。不同拍頻抑制方法的特點如表2所示。
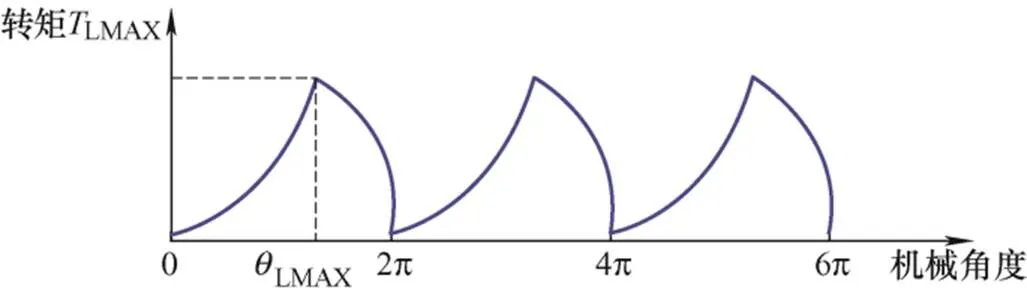
圖9 壓縮機負載變化曲線
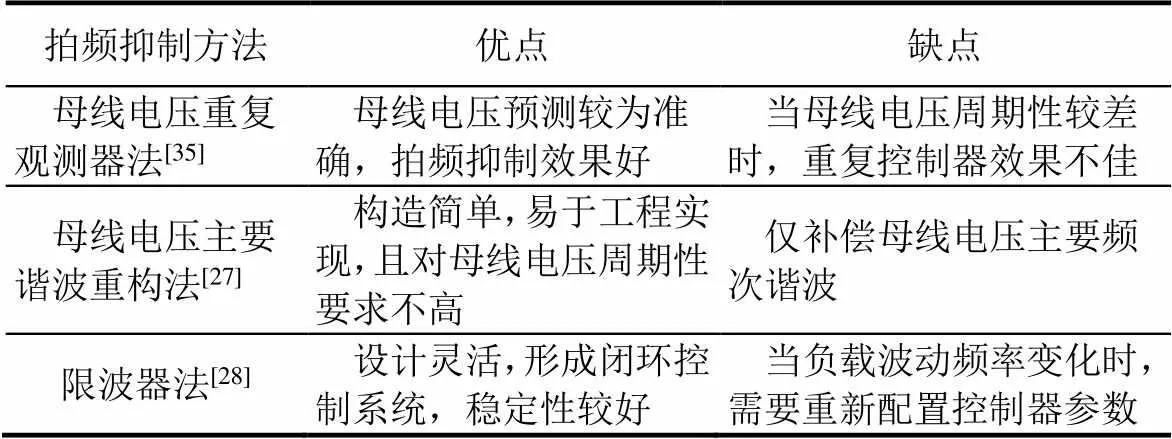
表2 不同拍頻抑制方法特點
電機拍頻現象通常是由兩個及以上頻率不呈比例關系的諧波交互產生。目前來看,抑制電機拍頻的常用方法是抑制其中某個導致拍頻的諧波成分,從而在源頭上解決拍頻問題。
3.3 再生能量控制技術
母線電容容值的大幅降低,使得母線端對驅動系統網側和機側的能量變化更加敏感,因此針對三相供電無電解電容電機驅動系統的防過壓控制和低電壓穿越控制成為學者們關注的話題。
為了實現再生制動過程中母線防過壓控制,常用的方法是加入有源制動單元。圖10為附加制動單元的驅動系統拓撲,當母線電壓超過設定值時制動單元開關管導通,再生能量可以消耗在制動電阻上,防止母線電壓泵升。但是該方法并不是無電解電容電機驅動系統的優選方案。首先,無電解電容電機驅動系統常用于風機、水泵類負載場合,這類場合通常對電機動態性能要求不高;其次,附加硬件單元會增加系統體積和成本,與無電解電容電機驅動系統的設計初衷不符。因此,通過電機控制算法實現防過壓控制更加受到人們的青睞。針對無電解電容電機驅動系統的防過壓控制有以下幾點要求: ①確保可靠的防過壓控制;②在此基礎上盡可能提升電機動態性能;③制動過程是可逆的,即可以恢復為電動運行狀態。

圖10 附加制動單元驅動系統拓撲
實際上,針對傳統變頻器的再生制動控制算法已有較多研究。其中具有代表性的是伍珀塔爾大學JIANG等[37]提出的基于電機損耗的制動方法,通過交軸電流邊界限制電機電磁能量,抑制母線電壓上升;根據電機轉速信息產生直軸電流諧波,增加電機損耗,提升電機動態性能。圖11為永磁電機能量流圖,實際上,為了實現再生制動和低電壓穿越過程中驅動器安全可靠運行,均需要合理調配電機各項損耗,將母線電壓維持在安全范圍內。由于無電解電容電機驅動系統的母線電容僅為傳統變頻器的1/50,其再生制動過程中母線電壓控制難度更大,此時采用上述再生制動算法難以取得令人滿意的控制效果。浙江大學QIAN等[38]針對無電解電容電機驅動系統設計了一種自適應母線電壓控制器,用于交軸電流邊界給定,該方案可以可靠抑制再生制動過程中的母線電壓泵升,但是電機動態性能較差。為此,哈爾濱工業大學DING等[39]分析了防過壓控制過程中的能量誤差,設計了一種雙重防過壓控制策略,并將電機轉速信息引入電壓控制器,控制系統在全速域內可以維持設定的幅頻特性,電機動態性能得到進一步提升。
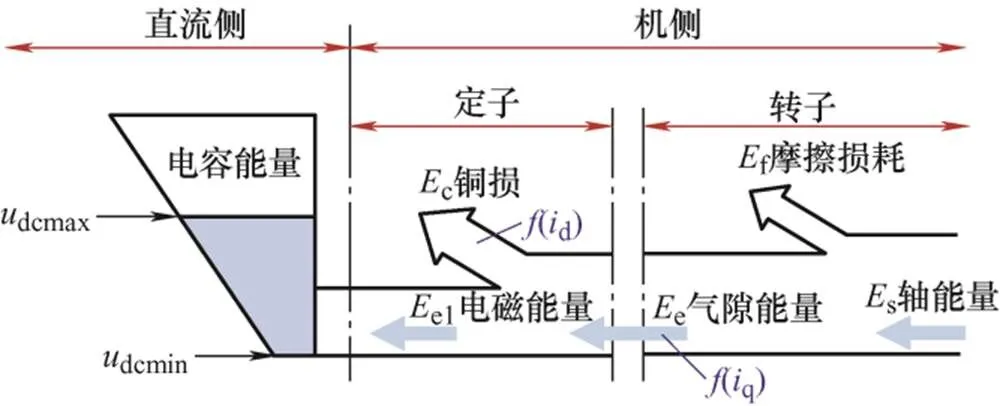
圖11 永磁電機能量流圖
母線電容通常需要承擔為輔助電路供電的功能,當網側電壓跌落,母線電壓仍需要維持在閾值電壓以上為輔助電路供電。由于母線電容容值極小,無電解電容電機驅動系統低電壓穿越的控制難度更大,尤其是在網側電壓長時間深度跌落時。浙江大學QIAN等[40]分析了網側斷電情況下無電解電容電機驅動系統能夠維持工作的最長時間,并設計了一種母線電壓控制器,利用電機動能維持母線電壓,提升了驅動系統低電壓穿越能力。ABB公司PIETILAINEN等[1]借助于弱磁控制器和交軸電流限幅提升低電壓穿越能力,在1 s內30%電壓跌落條件下驅動系統仍能夠正常運行。
目前,針對無電解電容電機驅動系統再生能量的控制方式多基于電流指令調控,由于電流環帶寬的限制,電流指令和實際電流之間存在偏差,這部分偏差導致的能量控制誤差可能造成母線電壓大范圍波動。因此,在控制策略設計過程中需要考慮如何降低能量控制誤差,基于電壓指令的調控是可能的途徑之一。
4 總結與展望
無電解電容電機驅動系統有著體積小、可靠性高等優勢,在工業領域獲得了廣泛的關注。本文主要圍繞驅動系統穩定性控制方法和機側性能控制技術兩方面,對三相供電交流電機驅動系統無電解電容控制技術進行歸納和總結。
(1) 通過電機控制算法或者改變拓撲均能實現驅動系統穩定控制。目前,研究熱點主要集中在電機控制算法的研究上。實際上,多種有源阻尼控制方法均能夠起到穩定系統的作用,但是當負載功率或者市電阻抗寬范圍變化時,如何實現有源阻尼器參數的自適應,是難點問題之一。此外,目前的研究多集中于單個無電解電容電機驅動系統的控制,當多臺無電解電容電機驅動系統并聯運行或者與小功率傳統電機驅動系統并聯運行,系統的穩定性控制及諧波問題將更為復雜。
(2) 為避免開關頻次的諧波流入電網,常用的方法是在網側加入電抗器,構成LC濾波網絡,通過電容電感值的合理設計達到抑制開關頻率相關諧波的目的。目前,學者們也正在對低電感或者無電感的無電解電容驅動系統展開研究,以低諧波為目標設計新的調制策略替換SVPWM調制,但是如何設計調制策略以有效抑制網側電流諧波還有待進一步研究。
(3) 相對于傳統驅動系統,無電解電容電機驅動系統對電機的控制能力會在一定程度上減弱。已有的控制策略,如弱磁控制、過調制策略,需要針對母線電壓周期性波動這一特點進行改進,在提高母線電壓利用率和降低輸出電壓諧波的同時,還需要為穩定控制留下足夠的母線電壓裕度。電容容值的大幅降低,也給驅動系統再生能量的控制提出了更高的要求。
(4) 驅動系統綜合性能調控也是無電解電容電機驅動系統面臨的難題。其需要同時兼顧網側、直流側、機側的控制性能,相較于傳統驅動系統,控制目標更多,且存在控制器之間的配合問題。因此,如何實現有效的多目標控制,提升驅動系統綜合性能具有重要的研究價值。
[1] PIETILAINEN K,HARNEFORS L,PETERSSON A,et al.DC-link stabilization and voltage sag ride-through of inverter drives[J]. IEEE Transaction on Industry Electronics,2006,53(4):1261-1268.
[2] JUNG J H,HEO H J,KIM J M,et al. DC-link voltage stabilization and source THD improvement using d-axis current injection in reduced DC-link capacitor system[C]// 42ndAnnual Conference of the IEEE Industrial Electronics Society,2016:2737-2742.
[3] MAHESHWARI R K,NIELSEN S M. Closed loop control of active damped Small DC-link capacitor based drive[C]// IEEE Energy Conversion Congress and Exposition,2010:4187-4191.
[4] MAHESHWARI R K,NIELSEN S M,HENRIKSEN B,et al. Active damping technique for small DC-link capacitor based drive system[C]// IEEE International Symposium on Industrial Electronics,2010:1205-1209.
[5] MAHESHWARI R K,NIELSEN S M,HENRIKSEN B, et al. An active damping technique for small DC-Link capacitor based drive system[J]. IEEE Transaction on Industry Informatics,2013,9(2):848-858.
[6] HINKKANEN M,HARNEFORS L,LUORNI J. Control of induction motor drives equipped with small DC-Link capacitance[C]//European Conference on Power Electronics and Applications,2007:1-10.
[7] MATHE L,ANDERSEN H R,LAZAR R,et al. DC-link compensation method for slim DC-link drives fed by soft grid[C]// IEEE International Symposium on Industrial Electronics,2010:1236-1241.
[8] MATHE L,TOROK L,WANG D,et al. Resonance reduction for AC drives with small capacitance in the DC link[J]. IEEE Transaction on Industry Application,2017,53(4):3814-3820.
[9] WANG D,LU K,RASMUSSEN P O,et al. Analysis of voltage modulation based active damping techniques for small DC-link drive system[C]// IEEE Energy Conversion Congress and Exposition (ECCE),2015:2927-2934.
[10] WANG D,LU K,RASMUSSEN P O,et al. Voltage modulation using virtual positive impedance concept for active damping of small DC-link drive system[J]. IEEE Transaction on Power Electronics,2018,33(12):10611-10621.
[11] LEE W J,SUL S K. DC-link voltage stabilization for reduced DC-link capacitor inverter[J]. IEEE Transaction on Industry Application,2014,50(1):404-414.
[12] LIU X,FORSYTH A J,CROSS A M,et al. Negative input-resistance compensator for a constant power load[J]. IEEE Transaction on Industry Electronics,2007,53(6):3188-3196.
[13] MAGNE P,MARX D,MOBARAKEH B N,et al. Large-signal stabilization of a DC-link supplying a constant power load using a virtual capacitor:Impact on the domain of attraction[J]. IEEE Transaction on Industry Application,2012,48(3):878-887.
[14] ZHAO N,WANG G,ZHANG R,et al. Inductor current feedback active damping method for reduced DC-link capacitance IPMSM drives[J]. IEEE Transaction on Power Electronics,2019,34(5):4558-4568.
[15] SHIN H,CHOI H G,HA J I. DC-link shunt compensator for three-phase system with small DC-link capacitor[C]// 9th International Conference on Power Electronics and ECCE Asia (ICPE-ECCE Asia),2015:33-39.
[16] WON I,CHO Y,LEE K B. Predictive control algorithm for capacitor-less inverters with fast dynamic response[C]// IEEE International Conference on Power and Energy (PECon),2016:479-483.
[17] SHIN H,SON Y,HA J I. Grid current shaping method with DC-link shunt compensator for three-phase diode rectifier-fed motor drive system[J]. IEEE Transaction on Power Electronics,2017,32(2):1279-1288.
[18] KIM S H,SOEK J K. Induction motor control with a small DC-link capacitor inverter fed by three-phase diode front-end rectifiers[J]. IEEE Transaction on Power Electronics,2015,30(5):2713-2720.
[19] KIM S H,KIM G R,YOO A,et al. Induction motor control with small DC-link capacitor inverter fed by three-phase diode front-end rectifiers[C]// IEEE Energy Conversion Congress and Exposition (ECCE),2014:3584-3591.
[20] SEOK J K,KIM S H. Hexagon voltage manipulating control (HVMC) for AC motor drives operating at voltage limit[J]. IEEE Transaction on Industry Application,2015,51(5):3829-3837.
[21] HINKKANEN M,LUOMI J. Induction motor drives equipped with diode rectifier and small DC-link capacitance[J]. IEEE Transaction on Industry Electronics,2008,55(1):312-320.
[22] YOO A,SUL S K,KIM H,et al. Flux-weakening strategy of an induction machine driven by an electrolytic-capacitor-less inverter[J]. IEEE Transaction on Industry Application,2011,47(3):1328-1336.
[23] SAREN H,PYRHONEN O,RAUMA K,et al. Overmodulation in voltage source inverter with small DC-link capacitor[C]//IEEE 36th Power Electronics Specialists Conference,2005:892-898.
[24] WANG G,HU H,DING D,et al. Overmodulation strategy for electrolytic capacitorless PMSM drives:Voltage distortion analysis and boundary optimization[J]. IEEE Transaction on Power Electronics,2020,35(9):9574-9585.
[25] SAREN H,PYRHONEN O,LUUKKO J,et al. Verification of frequency converter with small DC-link capacitor[C]//European Conference on Power Electronics and Applications,2005:1-10.
[26] CHOE S,SUL S K,CHO J H,et al. Electrolytic capacitorless 3-level inverter with diode front end for PMSM drive[C]// IEEE Energy Conversion Congress and Exposition (ECCE),2015:1603-1610.
[27] DING D,ZHAO N,WANG G,et al. Suppression of beat phenomenon for electrolytic capacitorless motor drives accounting for sampling delay of DC link voltage[J]. IEEE Transaction on Industry Electronics,DOI:10.1109/TIE.2021.3063984.
[28] ZHAO N,WANG G,LI B. Beat phenomenon suppression for reduced DC-link capacitance IPMSM drives with fluctuated load torque[J]. IEEE Transaction on Industry Electronics,2019,66(11):8334-8344.
[29] TIAN S,LEE F C,LI Q. A simplified equivalent circuit model of series resonant converter[J]. IEEE Transaction on Power Electronics,2016,31(5):3922-3931.
[30] YUE X,BOROYEVICH D,LEE F,et al. Beat frequency oscillation analysis for power electronic converters in DC nano-grid based on crossed frequency output impedance matrix model[J]. IEEE Transaction on Power Electronics,2018,33(4):3052-3064.
[31] KAWAMURA W,CHIBA Y,HAGIWARA M,et al. Experimental verification of an electrical drive fed by a modular multilevel TSBC converter when the motor frequency gets closer or equal to the supply frequency[J]. IEEE Transaction on Industry Application,2017,53(3):2297-2306.
[32] ITOH J I,CHIANG G T,MAKI K. Beatless synchronous PWM control for high-frequency single-pulse operation in a matrix converter[J]. IEEE Transaction on Power Electronics,2013,28(3):1338-1347.
[33] CHEOK A,KAWAMOTO S,MATSUMOTO T,et al. AC drive with particular reference to traction drives[C]// Fourth International Conference on Advances in Power System Control,1997:348-353.
[34] ENJETI P N,SHIREEN W. A new technique to reject DC-link voltage ripple for inverters operating on programmed PWM waveforms[J]. Transaction on Power Electronics,1992,7(1):171-180.
[35] OUYANG H,ZHANG K,ZHANG P,et al. Repetitive compensation of fluctuating DC link voltage for railway traction drives[J]. Transaction on Power Electronics,2011,26(8):2160-2171.
[36] WANG D,LU K. Analysis of system interharmonics of VSI-fed small DC-link drive with varying power load[C]// IEEE Energy Conversion Congress and Exposition (ECCE). IEEE,2018:3347-3354.
[37] JIANG J,HOLTZ J. An efficient braking method for controlled AC drives with a diode rectifier front end[J]. IEEE Transaction on Industry Application,2001,37(5):1299-1307.
[38] QIAN Z,YAO W,LEE K. Dynamic DC-link over-voltage mitigation method in electrolytic capacitor-less adjustable speed drive systems[C]// IEEE Energy Conversion Congress and Exposition (ECCE),2018:4628-4632.
[39] DING D,ZHANG G,WANG G,et al. Dual anti-overvoltage control scheme for electrolytic capacitorless IPMSM drives with coefficient auto regulation[J]. IEEE Transactions on Power Electronics,2020(3):2895-2907.
[40] QIAN Z,YAO W,LEE K. Voltage sag ride-through capabilities of electrolytic capacitor-less adjustable speed drive system during power interruptions[C]// IEEE Energy Conversion Congress and Exposition (ECCE),2018:763-768.
[41] HINKKANEN M,LUONI J. Braking scheme for vector-controlled induction motor drives equipped with diode rectifier without braking resistor[J]. IEEE Transaction on Industry Application,2006,42(5):1257-1263.
[42] LEE W J,SUL S K. DC-link voltage stabilization for reduced dc-link capacitor inverter[C]//IEEE Energy Conversion Congress and Exposition,2009:1740-1744.
[43] MARCETIC D,MATIC P R. Nonregenerative braking of permanent magnet synchronous motor[J]. IEEE Transaction on Industry Electronics,2020,67(10):8186-8196.
[44] 周星野. 無電解電容逆變器驅動下的永磁同步電機的應用研究[D]. 南京:南京航空航天大學,2015.
ZHOU Xingye. Research on application of PMSM driven by the inverter without electrolytic capacitor[D]. Nanjing:Nanjing University of Aeronautics and Astronautics,2015.
[45] 尹泉,李海春,羅慧,等. 無電解電容永磁同步電機驅動系統諧振抑制[J]. 華中科技大學學報,2021,49(6):1-6.
YIN Quan,LI Haichun,LUO Hui,et al. Resonance suppression for electrolytic capacitor-less IPMSM drive system[J]. J. Huazhong Univ. of Sci. & Tech.,2021,49(6):1-6.
[46] 潘冬華,阮新波,王學華,等. 增強LCL型并網逆變器對電網阻抗魯棒性的控制參數設計[J]. 中國電機工程學報,2015,35(10):2558-2566.
PAN Donghua,RUAN Xinbo,WANG Xuehua,et al. Controller design for LCL-type grid-connected inverter to achieve high robustness against grid-impedance variation[J]. Proceedings of the CSEE,2015,35(10):2558-2566.
[47] 吳文進,蘇建徽,汪海寧,等. 一種改進型的有源阻尼方法與諧振抑制機理分析[J]. 太陽能學報,2020,41(11):71-78.
WU Wenjin,SU Jianhui,WANG Haining,et al. An improved active damping method and harmonic suppression mechanism analysis[J]. Acta Energiae Solaris Sinica,2020,41(11):71-78.
[48] 楊明,楊杰,趙鐵英,等. 弱電網下采用電容電壓前饋的LCL并網逆變器諧振頻率偏移抑制策略[J/OL]. 電機與控制學報,2021:1-15. http://kns.cnki.net/kcms/ detail/23.1408.TM.20210616.1822.013.html.
YANG Ming,YANG Jie,ZHAO Tieying,et al. Resonant frequency offset suppression strategy of LCL grid-connected inverter using capacitor voltage feedforward in weak grid[J/OL]. Electric Machines and Control,2021:1-15. http://kns.cnki.net/kcms/detail/ 23.1408.TM.20210616.1822.013.html.
[49] 陶海軍,周猶松,張國澎,等. LCL型并網逆變器并聯諧振機理分析及抑制方法[J]. 上海交通大學學報,2020,54(10):1065-1073.
TAO Haijun,ZHOU Yousong,ZHANG Guopeng,et al. Parallel resonance mechanism analysis and suppression method for LCL type grid connected inverter[J]. Journal of Shanghai Jiao Tong University,2020,54(10):1065-1073.
Review of Control Technology for Electrolytic Capacitorless AC Motor Drives with Three-phase Power Supply
DING Dawei WANG Gaolin ZHANG Guoqiang XU Dianguo
(School of Electrical Engineering and Automation, Harbin Institute of Technology, Harbin 150001)
Along with the development of the control technology of PMSM motor, reliability, life time and power density have become important issues. The electrolytic capacitorless AC motor drive with three-phase power supply holds advantages of small volume, long service time and high reliability, which is an important development direction of motor drives. Currently, electrolytic capacitorless AC motor drives are already applied in industry. Based on the stable operation of the drive and the performance control technology of the machine side, the development status of the electrolytic capacitorless AC motor drive is summarized and the advantages and disadvantages of the existing schemes are pointed out. Finally, the current difficult problems and future development trend of the electrolytic capacitorless AC motor drive are summarized and prospected.
AC motor;electrolytic capacitorless drive;stability control;motor side performance control
10.11985/2021.04.002
TM341
* 國家自然科學基金資助項目(51877054)。
20210726收到初稿,20211022收到修改稿
丁大尉,男,1991年生,博士研究生。主要研究方向為永磁電機無電解電容驅動技術。E-mail:dingdawei_hit@foxmail.com
王高林(通信作者),男,1978年生,博士,教授。主要研究方向為交流電機驅動與控制技術。E-mail:WGL818@hit.edu.cn
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
