基于高頻方波電壓注入法和改進(jìn)龍伯格觀測(cè)器的永磁同步電機(jī)轉(zhuǎn)速估計(jì)的研究*
2021-02-15 12:22:18巫慶輝黃成鑫侯元祥
電氣工程學(xué)報(bào) 2021年4期
關(guān)鍵詞:系統(tǒng)
巫慶輝 黃成鑫 侯元祥
基于高頻方波電壓注入法和改進(jìn)龍伯格觀測(cè)器的永磁同步電機(jī)轉(zhuǎn)速估計(jì)的研究*
巫慶輝1黃成鑫1侯元祥2
(1. 遼寧工程技術(shù)大學(xué)電氣與控制工程學(xué)院 葫蘆島 125105;2. 渤海大學(xué)工學(xué)院 錦州 121013)
針對(duì)傳統(tǒng)矢量控制方法難以獲得精確的轉(zhuǎn)子位置和轉(zhuǎn)速的問(wèn)題,提出一種基于高頻方波注入法和改進(jìn)龍伯格觀測(cè)器的永磁同步電機(jī)的轉(zhuǎn)速研究方法。因高階系統(tǒng)穩(wěn)定性較差,微機(jī)控制難度較高,并且由于高階的傳遞函數(shù)中參數(shù)對(duì)電機(jī)參數(shù)和控制器參數(shù)的依賴性較大,因此很難對(duì)于永磁同步電機(jī)具有通用的控制性能。為解決上述問(wèn)題,將龍伯格觀測(cè)器中的電磁轉(zhuǎn)矩前饋?lái)?xiàng)替換為一個(gè)由速度指令組成的二階系統(tǒng),并用最小二乘法得到該二階系統(tǒng)。仿真結(jié)果表明,改進(jìn)方案在負(fù)載擾動(dòng)下具有更好的跟蹤精度和魯棒性。
永磁同步電機(jī);無(wú)傳感器控制;方波電壓注入法;龍伯格觀測(cè)器;最小二乘法
1 引言
永磁同步電動(dòng)機(jī)(Permanent magnet synchronous motor,PMSM)由于其高效率、高功率密度和無(wú)直流磁場(chǎng)等優(yōu)點(diǎn),近年來(lái)被廣泛應(yīng)用于交流傳動(dòng)領(lǐng)域[1]。特別是隨著高精度伺服控制和電動(dòng)汽車(chē)領(lǐng)域的高速發(fā)展,對(duì)永磁同步電機(jī)的磁場(chǎng)定向控制提出了更高的要求。矢量控制的核心是如何獲得精確的轉(zhuǎn)子位置和轉(zhuǎn)速。目前已有許多無(wú)傳感器技術(shù)用于估計(jì)轉(zhuǎn)子的位置和速度。
多年前,基于高頻正弦信號(hào)注入的無(wú)位置傳感器控制方法開(kāi)辟了永磁同步電機(jī)無(wú)位置傳感器控制的新領(lǐng)域[2-4]。在零頻或低頻情況下,轉(zhuǎn)子的位置可以通過(guò)注入旋轉(zhuǎn)高頻電壓或脈動(dòng)高頻電壓,并使用跟蹤算法或外差法獲得[5]。但是當(dāng)采用旋轉(zhuǎn)或脈動(dòng)的高頻電壓注入方法時(shí),需要使用低通濾波器(Low pass filter, LPF)I來(lái)獲得誤差信號(hào),這些低通濾波器由于其固有的時(shí)延而降低了無(wú)位置傳感器的控制性能[6]。近十年來(lái),基于方波信號(hào)注入的方法得到了發(fā)展,該方法不需要LPFs,而是通常使用一個(gè)龍伯格位置觀測(cè)器來(lái)收斂估計(jì)誤差,將電流控制器的帶寬提高到250 Hz,速度控制器的帶寬提高到50 Hz[7]。通常,龍伯格位置觀測(cè)器采用電磁轉(zhuǎn)矩前饋來(lái)提高轉(zhuǎn)子位置跟蹤性能。通過(guò)仿真試驗(yàn),研究發(fā)現(xiàn)觀測(cè)器的穩(wěn)定性取決于負(fù)載轉(zhuǎn)矩的預(yù)測(cè)精度,當(dāng)負(fù)載擾動(dòng)頻繁變化時(shí),傳統(tǒng)的方法無(wú)法快速跟蹤轉(zhuǎn)子位置[8]。
基于以上研究成果和存在的問(wèn)題,本文對(duì)龍伯格位置觀測(cè)器進(jìn)行了改進(jìn)。首先,分析了永磁同步電機(jī)的矢量控制和方波高頻電壓注入法的原理[9];然后,利用矢量控制中的速度指令構(gòu)造了一個(gè)新的二階系統(tǒng)。作為一個(gè)新的前饋控制參數(shù),前饋?lái)?xiàng)不再受負(fù)載的影響。仿真結(jié)果表明,改進(jìn)的轉(zhuǎn)子位置觀測(cè)器在負(fù)載擾動(dòng)下具有較好的性能。
2 永磁同步電機(jī)矢量控制系統(tǒng)
矢量控制(Field-oriented control,F(xiàn)OC)采用空間矢量表示定子電流。它將三相定子電流(,,)轉(zhuǎn)換為兩相時(shí)變系統(tǒng)(,)。從該時(shí)變系統(tǒng)通過(guò)旋轉(zhuǎn)變換得到一個(gè)雙坐標(biāo)時(shí)不變系統(tǒng)(,)。這兩個(gè)組成部分相互垂直,相互獨(dú)立。這樣,它們可以分開(kāi)調(diào)節(jié),類(lèi)似于直流電機(jī)的雙閉環(huán)控制系統(tǒng)。
永磁同步電機(jī)在電源頻率和實(shí)際轉(zhuǎn)子坐標(biāo)系(-坐標(biāo)系)下的電壓方程的矩陣形式為

忽略阻尼力矩和扭轉(zhuǎn)彈性力矩,力學(xué)方程為

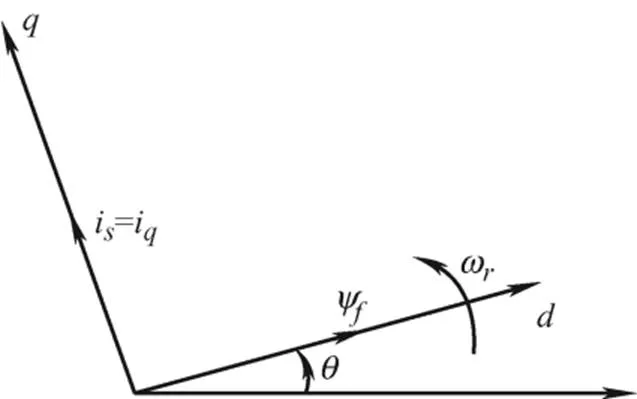
圖1 最大轉(zhuǎn)矩電流比控制矢量圖
3 高頻方波注入法原理
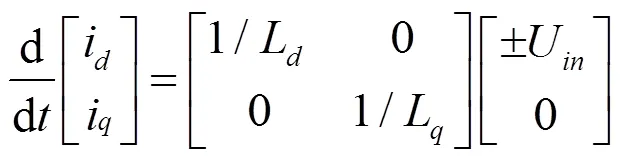
一般情況下,高頻注入信號(hào)的頻率遠(yuǎn)高于電機(jī)運(yùn)行的基頻[14],幅值較低。因此,當(dāng)將方波電壓注入估計(jì)轉(zhuǎn)子參考系-軸時(shí),感應(yīng)高頻電流與電壓的關(guān)系可以描述為
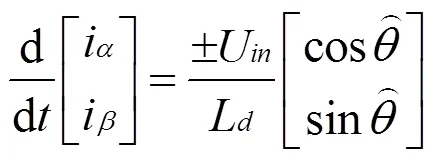
因此,感應(yīng)高頻電流可以推導(dǎo)如下


圖2 轉(zhuǎn)子參考系和估計(jì)轉(zhuǎn)子參考系電壓平面

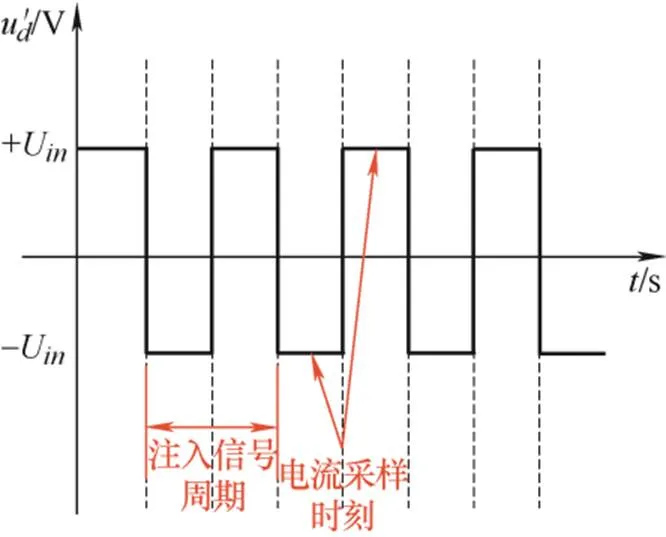
圖3 方波注入信號(hào)示意圖
在兩相時(shí)變系統(tǒng)(,)中對(duì)電流進(jìn)行采樣,式(6)通過(guò)反派克變換為
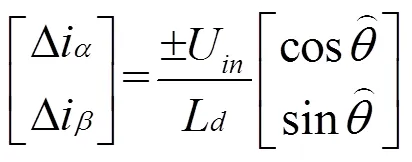
因此,轉(zhuǎn)子位置可以通過(guò)atan2函數(shù)得到
4 龍伯格位置觀測(cè)器的設(shè)計(jì)與改進(jìn)
龍伯格觀測(cè)器屬于全狀態(tài)觀測(cè)器,通過(guò)輸出和輸入實(shí)現(xiàn)對(duì)系統(tǒng)狀態(tài)的觀測(cè)。永磁同步電機(jī)的力學(xué)方程如式(3)所示,其狀態(tài)空間方程式為
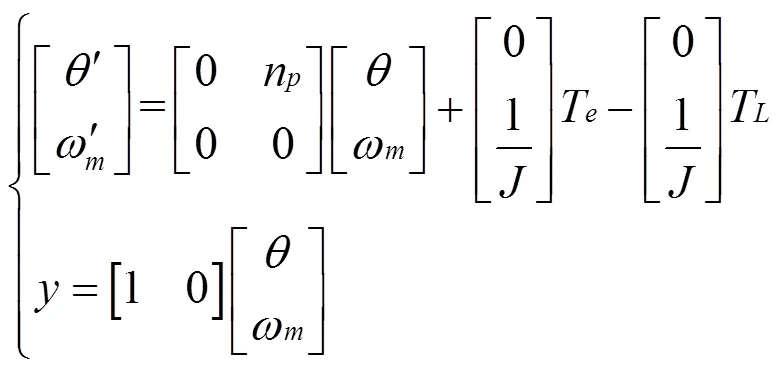
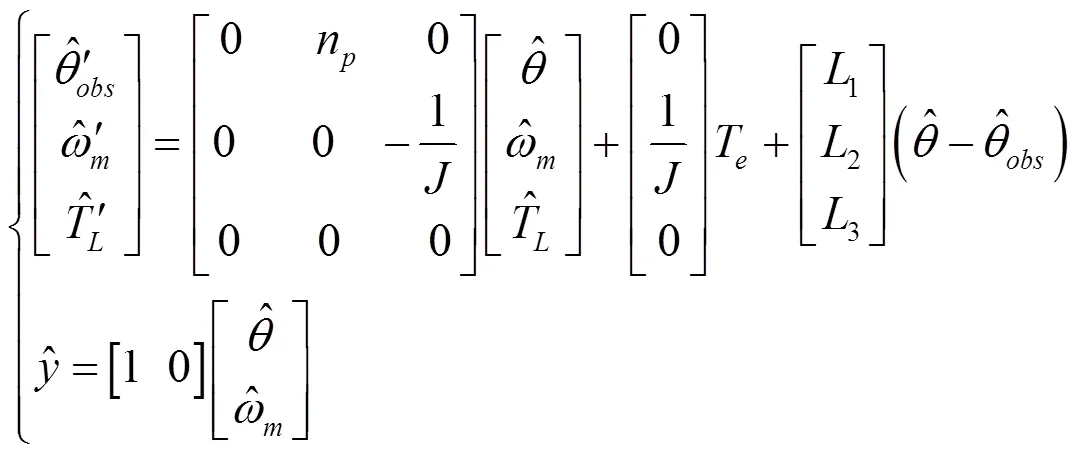
由于負(fù)載轉(zhuǎn)矩T不可測(cè)量,為了提高觀測(cè)器的穩(wěn)態(tài)性能,增加積分環(huán)節(jié)對(duì)T進(jìn)行估計(jì),最終使觀測(cè)器的角度誤差趨于零。龍伯格觀測(cè)器可以設(shè)計(jì)如下
程序框圖如圖4所示。
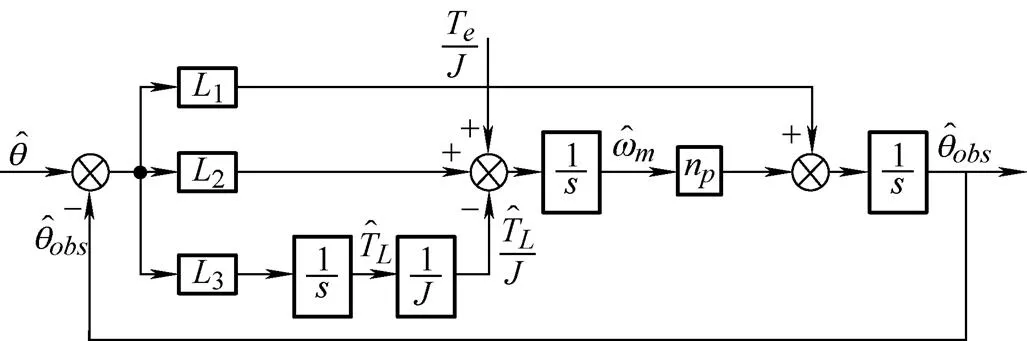
圖4 龍伯格觀測(cè)器結(jié)構(gòu)框圖
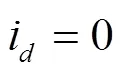
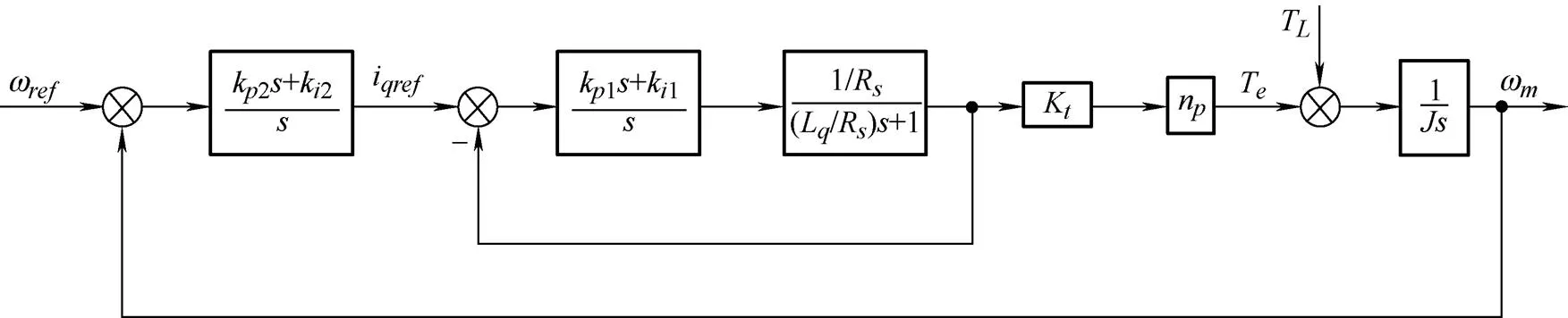
圖5 FOC傳遞函數(shù)框圖

其中
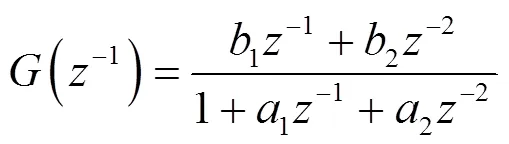
式(12)為六階6極點(diǎn)5零點(diǎn)系統(tǒng),階數(shù)較高,不易由微機(jī)控制,傳遞函數(shù)參數(shù)嚴(yán)重依賴于電機(jī)參數(shù)和控制器參數(shù),不具有通用性。因此對(duì)于該高階模型進(jìn)行降階為二階模型[12],本文采用二階系統(tǒng)代替式(12)所示系統(tǒng),二階系統(tǒng)的基本模型如式(13)所示,模型參數(shù)的整定計(jì)算采用最小二乘系統(tǒng)辨識(shí)方法實(shí)現(xiàn),減少觀測(cè)器對(duì)模型的依賴性。此外,最小二乘系統(tǒng)辨識(shí)方法是基于離散系統(tǒng)的,易于在微機(jī)控制系統(tǒng)中應(yīng)用。降階后的二階域傳遞函數(shù)標(biāo)準(zhǔn)型為
綜上所述,改進(jìn)后的龍伯格位置觀測(cè)器結(jié)構(gòu)圖如圖6所示。

圖6 改進(jìn)后的龍伯格觀測(cè)器結(jié)構(gòu)示意圖
5 仿真與結(jié)果分析
為了驗(yàn)證上述算法的可行性,在Matlab中進(jìn)行了仿真。整個(gè)系統(tǒng)的結(jié)構(gòu)圖如圖7所示。
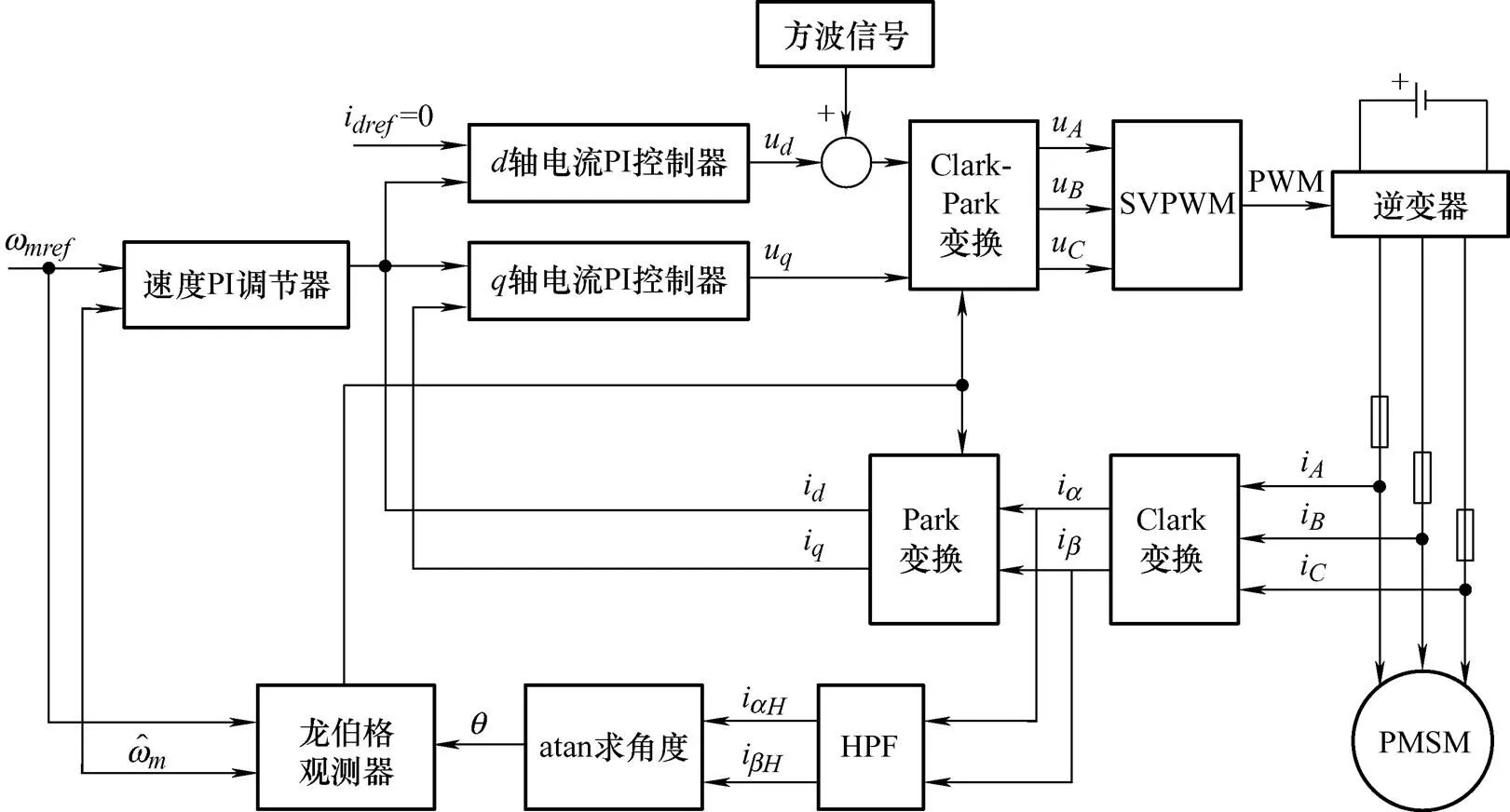
圖7 無(wú)傳感器FOC系統(tǒng)結(jié)構(gòu)圖
仿真所用的永磁同步電機(jī)參數(shù)如表1所示。
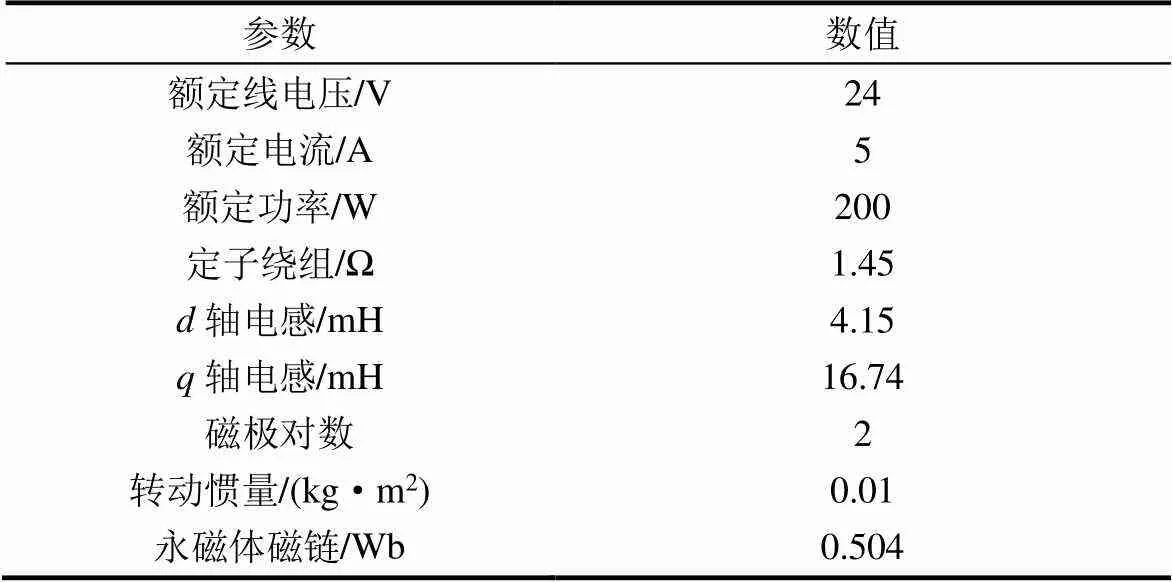
表1 仿真用永磁同步電機(jī)參數(shù)
5.1 前饋控制參數(shù)識(shí)別


圖8為采用速度步進(jìn)命令時(shí)的仿真結(jié)果對(duì)比。可以看出,雖然模型的階數(shù)降低了,但是主要的動(dòng)態(tài)信息仍然保留,離散域的二階模型在微機(jī)控制系統(tǒng)中很容易實(shí)現(xiàn)。
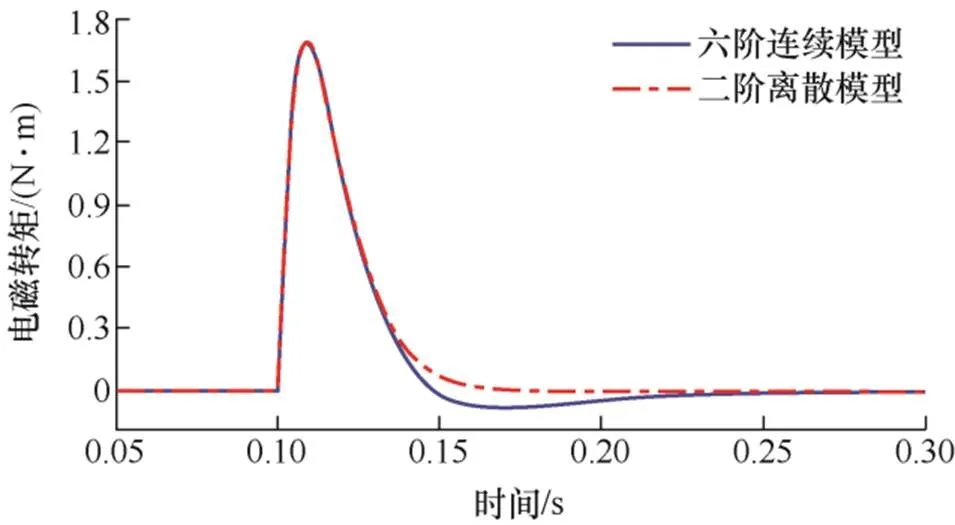
圖8 原模型和簡(jiǎn)化模型的階躍響應(yīng)
5.2 仿真試驗(yàn)和結(jié)果分析
離散系統(tǒng)的仿真進(jìn)行了采樣時(shí)間為0.001 s,軸注入信號(hào)的頻率是5 kHz,振幅是4 V,二階巴特沃斯高通濾波器的截止頻率是1 kHz,用于過(guò)濾電流信號(hào)。電機(jī)穩(wěn)定后,在向軸注入高頻電壓后 圖9a為、軸電流波形,圖9b為、軸經(jīng)過(guò)高通濾波后的電流波形。
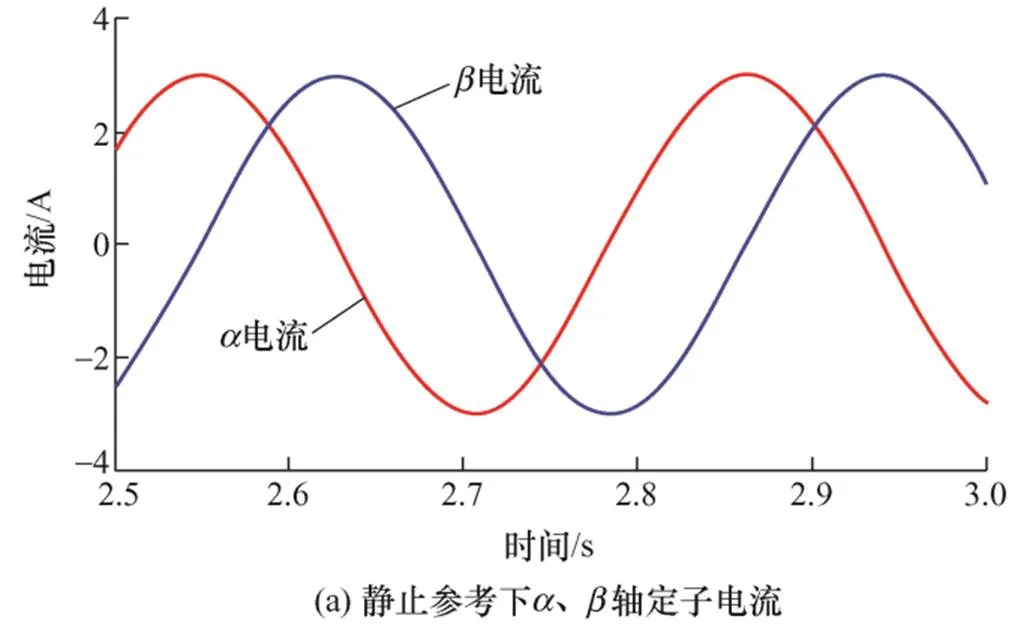
由于高頻方波信號(hào)的注入,在、軸的電流波形中存在大量的高次諧波。通過(guò)提取高頻信號(hào),可以通過(guò)式(8)和式(9)得到永磁同步電機(jī)轉(zhuǎn)子位置 信息。
為了進(jìn)一步驗(yàn)證本文提出的改進(jìn)方法的效果和觀測(cè)器的動(dòng)態(tài)性能,在仿真過(guò)程中加入了速度指令和負(fù)載擾動(dòng)。仿真過(guò)程如下:電機(jī)空載起動(dòng),期望轉(zhuǎn)速為5 rad/s,電機(jī)穩(wěn)定后,1 s處增加10 rad/s階躍速度指令,2 s處增加3 N ?m階躍負(fù)載擾動(dòng)。圖10為傳統(tǒng)觀測(cè)器和改進(jìn)觀測(cè)器對(duì)電機(jī)轉(zhuǎn)速的觀測(cè)結(jié)果對(duì)比,實(shí)線是電機(jī)的實(shí)際速度。
根據(jù)圖6,位置信息直接由速度信息積分而來(lái),因此速度的跟蹤性能間接反映了位置的估計(jì)效果。為了更直觀地比較,將速度命令的跟蹤時(shí)間和誤差的標(biāo)準(zhǔn)差作為觀測(cè)器性能的評(píng)價(jià)標(biāo)準(zhǔn),結(jié)果如表2所示。
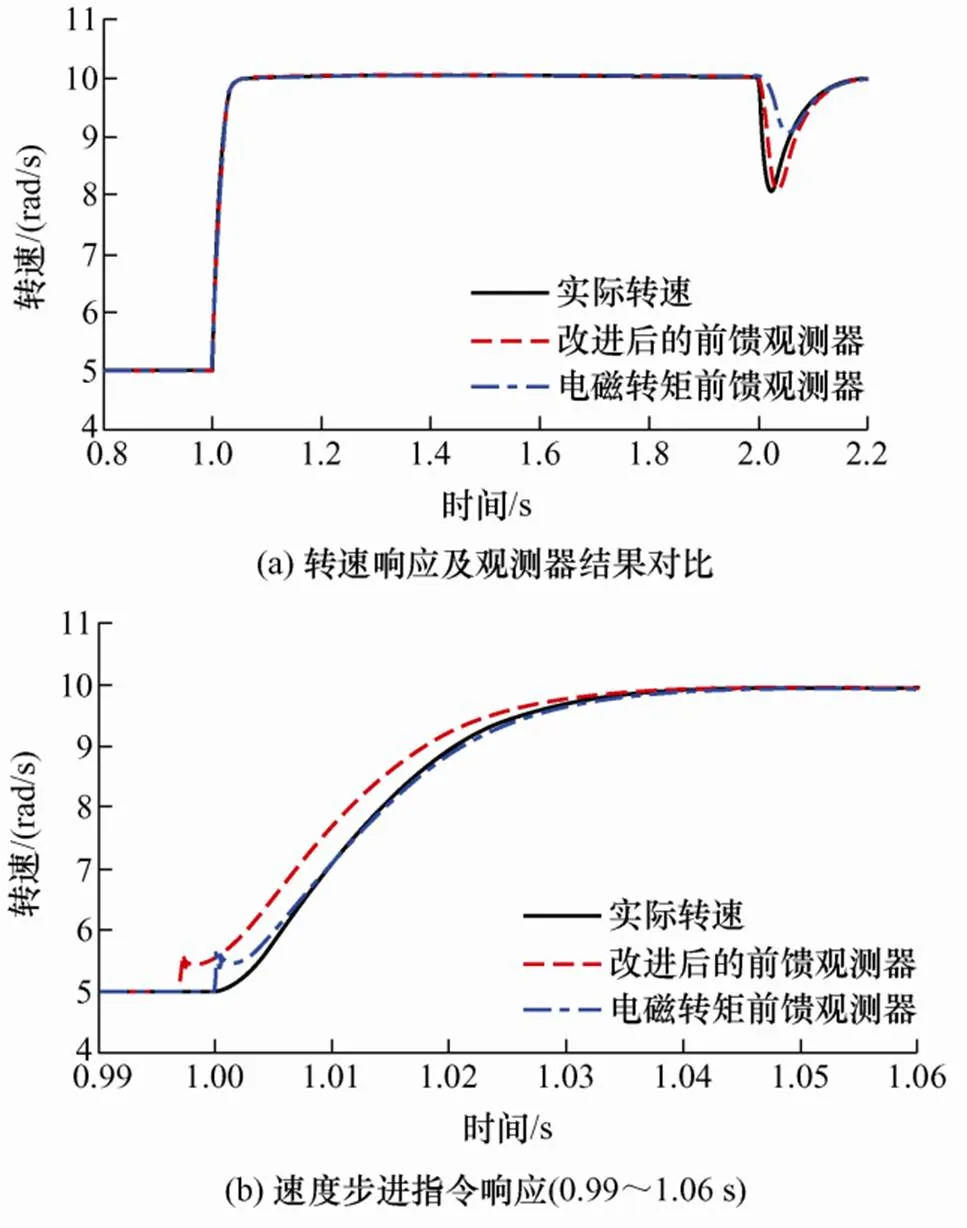
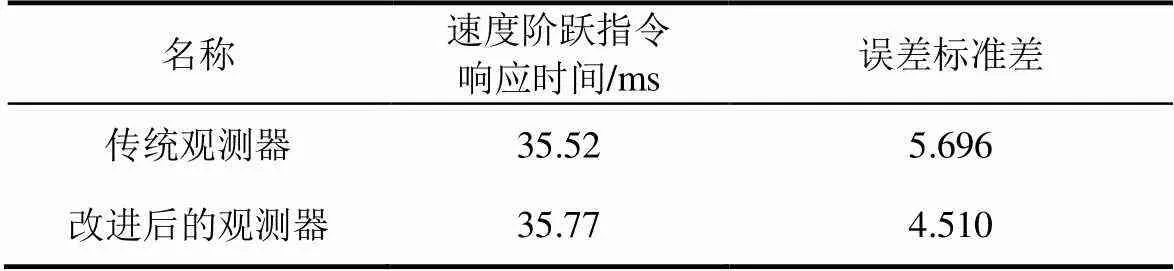
表2 觀測(cè)器的性能比較
從圖10和表2可以看出,改進(jìn)的龍伯格觀測(cè)器在速度指令階躍擾動(dòng)下的跟蹤效果與傳統(tǒng)觀測(cè)器基本相同,基本可以實(shí)現(xiàn)對(duì)電機(jī)轉(zhuǎn)速的無(wú)延時(shí)跟蹤。由于改進(jìn)龍伯格觀測(cè)器的前饋?lái)?xiàng)不受負(fù)載轉(zhuǎn)矩影響,負(fù)載的抗擾性顯著提高。在試驗(yàn)的第2 s時(shí),速度的跟蹤效果明顯優(yōu)于常規(guī)觀測(cè)器。在整個(gè)試驗(yàn)過(guò)程中,速度跟蹤誤差的標(biāo)準(zhǔn)差為4.510,降低了約20%。
6 結(jié)論
(1) 本文對(duì)永磁同步電機(jī)無(wú)傳感器FOC系統(tǒng)中的轉(zhuǎn)子位置觀測(cè)器進(jìn)行了改進(jìn)。利用速度指令構(gòu)造的離散二階系統(tǒng)作為位置觀測(cè)器的前饋,解決了傳統(tǒng)位置觀測(cè)器易受負(fù)載擾動(dòng)的問(wèn)題。
(2) 利用最小二乘法辨識(shí)二階系統(tǒng)的參數(shù),該方法不依賴于永磁同步電機(jī)的模型和控制器參數(shù),方便應(yīng)用于DSP控制系統(tǒng)。
(3) 仿真結(jié)果表明,改進(jìn)后的觀測(cè)器具有更好的跟蹤效果和更快的誤差收斂速度。該方法可以有效地提高同步電機(jī)矢量控制的性能,具有很高的實(shí)用價(jià)值。
[1] 尹忠剛,靳海旭,張彥平,等. 基于擾動(dòng)觀測(cè)器的交流伺服系統(tǒng)低速爬行濾波反步控制方法[J]. 電工技術(shù)學(xué)報(bào),2020,35(S1):203-211.
YIN Zhonggang,JIN Haixu,ZHANG Yanping,et al. Backstepping control method of low speed crawling filter for AC servo system based on disturbance observer[J]. Acta Electrotechnics Sinica,2020,35(S1):203-211.
[2] 李柏玉,陸永耕,黃禹銘. 基于改進(jìn)龍貝格觀測(cè)器的控制系統(tǒng)的研究與仿真[J]. 儀表技術(shù),2019(9):32-36.
LI Baiyu,LU Yonggeng,HUANG Yuming. Research and simulation of control system based on improved Luenberger observer[J]. Instrumentation Technology,2019(9):32-36.
[3] 胡榮光. 開(kāi)關(guān)磁阻電機(jī)位置傳感器故障診斷與低速無(wú)位置傳感器方法研究[D]. 南京:南京航空航天大學(xué),2015.
HU Rongguang. Fault diagnosis of switched reluctance motor position sensor and research on low speed sensorless method[D]. Nanjing:Nanjing University of Aeronautics and Astronautics,2015.
[4] 王逸之. 永磁同步牽引電機(jī)全速域無(wú)位置傳感器控制研究[D]. 北京:北京交通大學(xué),2019.
WANG Yizhi. Research on full speed sensorless control of permanent magnet synchronous traction motor[D]. Beijing:Beijing Jiaotong University,2019.
[5] 孟柳. 基于半實(shí)物的高速永磁電機(jī)無(wú)速度傳感器運(yùn)行研究[D]. 北京:北方工業(yè)大學(xué),2019.
MENG Liu. Research on speed sensorless operation of high speed permanent magnet motor based on hardware in the loop[D]. Beijing:North University of Technology,2019.
[6] 杜思宸,全力,朱孝勇,等. 基于高頻注入的永磁同步電機(jī)零低速下位置傳感器失效故障容錯(cuò)控制[J]. 中國(guó)電機(jī)工程學(xué)報(bào),2019,39(10):3038-3047.
DU Sichen,QUAN Li,ZHU Xiaoyong,et al. Fault tolerance control of position sensor failure at zero low speed of permanent magnet synchronous motor based on high frequency injection[J]. Proceedings of the CSEE,2019,39(10):3038-3047.
[7] 張凱泉. 基于龍伯格觀測(cè)器法的永磁同步電機(jī)無(wú)感矢量控制算法改進(jìn)研究[D]. 長(zhǎng)沙:湖南工業(yè)大學(xué),2018.
ZHANG Kaiquan. Research on improvement of sensorless vector control algorithm of permanent magnet synchronous motor based on Luenberger observer method[D]. Changsha:Hunan University of Technology,2018.
[8] 劉立佳. 鏜桿鏜削過(guò)程振動(dòng)控制[J]. 科學(xué)技術(shù)創(chuàng)新,2017(27):1-3.
LIU Lijia. Vibration control in boring process of boring bar[J]. Science and Technology Innovation,2017(27):1-3.
[9] 高福隆. 面貼式永磁同步電機(jī)無(wú)位置傳感器控制技術(shù)研究[D]. 哈爾濱:哈爾濱工程大學(xué),2016.
GAO Fulong. Research on sensorless control technology of surface mounted permanent magnet synchronous motor[D]. Harbin:Harbin Engineering University,2016.
[10] 徐東,王田苗,劉敬猛,等. 基于參數(shù)辨識(shí)的永磁同步電機(jī)電流精確控制方法[J]. 電力自動(dòng)化設(shè)備,2008(11):30-35.
XU Dong,WANG Tianmiao,LIU Jingmeng,et al. Accurate current control method of permanent magnet synchronous motor based on parameter identification[J]. Electric Power Automation Equipment,2008(11):30-35.
[11] 何曉會(huì). 基于慣量辨識(shí)的永磁同步電機(jī)自抗擾控制策略研究[D]. 哈爾濱:哈爾濱工業(yè)大學(xué),2020.
HE Xiaohui. Research on ADRC strategy of permanent magnet synchronous motor based on inertia identification[D]. Harbin:Harbin Institute of Technology,2020.
[12] 侯利民,王紅發(fā),劉建雙,等. 基于NDOB的PMSM調(diào)速系統(tǒng)最優(yōu)滑模控制[J]. 控制工程,2017,24(S1):64-68.
HOU Limin,WANG Hongfa,LIU Jianshuang,et al. Optimal sliding mode control of PMSM speed regulation system based on NDOB[J]. Control Engineering,2017,24(S1):64-68.
[13] 侯本帥. 基于滑模觀測(cè)器與預(yù)測(cè)控制的永磁同步電機(jī)優(yōu)化控制研究[D]. 北京:北方工業(yè)大學(xué),2017.
HOU Benshuai. Research on optimal control of permanent magnet synchronous motor based on sliding mode observer and predictive contro[D]. Beijing:North China University of Technology,2017.
[14] 劉慶飛. 旋轉(zhuǎn)高頻信號(hào)注入法在電梯門(mén)機(jī)無(wú)位置傳感器驅(qū)動(dòng)系統(tǒng)中的應(yīng)用[D]. 天津:天津大學(xué),2016.
LIU Qingfei. Application of rotating high frequency signal injection method in sensorless driving system of elevator door motor[D]. Tianjin:Tianjin University,2016.
[15] 矯日華. 抓捕工具控制器及伺服控制策略研究[D]. 哈爾濱:哈爾濱工業(yè)大學(xué),2019.
JIAO Rihua. Research on capture tool controller and servo control strategy[D]. Harbin:Harbin Institute of Technology,2019.
Sensorless FOC of PMSM Based on High Frequency Square-wave Voltage Injection and Improved Luenberger Position Observer
WU Qinghui1HUANG Chengxin1HOU Yuanxiang2
(1. Faculty of Electrical and Control Engineering, Liaoning Technical University, Huludao 125105;2. College of Engineering, Bohai University, Jinzhou 121013)
Aiming at the problem that the traditional vector control method is difficult to obtain accurate rotor position and speed, a speed research method of permanent magnet synchronous motor based on high frequency square wave injection method and improved Luenberger observer is proposed. Because of the poor stability of the high-order system, the microcomputer control is difficult. Besides, the parameters in the high-order transfer function are highly dependent on the motor parameters and controller parameters, it is difficult to have general control performance for permanent magnet synchronous motor. In order to solve these problems, the electromagnetic torque feedforward term in the Luenberger observer is replaced by a second-order system composed of speed commands, and the second-order system is obtained by the least square method. Simulation results show that the improved scheme has better tracking accuracy and robustness under load disturbance.
PMSM;sensorless control;square-wave voltage;Luenberger observer;least square method
10.11985/2021.04.015
TM561
*遼寧省教育廳重點(diǎn)攻關(guān)資助項(xiàng)目(LZ2020001)。
20210705收到初稿,20211030收到修改稿
巫慶輝,男,1974年生,博士,教授。主要研究方向?yàn)殡娏﹄娮优c電力傳動(dòng)。E-mail:qinghuiwu@qq. com
黃成鑫,男,1998年生,碩士研究生。主要研究方向?yàn)殡娏﹄娮优c電力傳動(dòng)。E-mail:1204391187@qq.com
侯元祥,男,1995年生,碩士研究生。主要研究方向?yàn)殡娏﹄娮优c電力傳動(dòng)。E-mail:1451582076@qq. com
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(xiāo)(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
