時變時滯電力系統魯棒鎮定控制器設計
2021-02-15 12:22:20沈力沈媛周浩
電氣工程學報 2021年4期
沈力 沈媛 周浩
時變時滯電力系統魯棒鎮定控制器設計
沈力1沈媛2周浩2
(1. 江蘇省規劃設計集團有限公司市政規劃與工程設計院 南京 210036;2. 中國電子科技集團公司第二十八研究所 南京 210007)
為考慮時滯系統的不確定性,在常時滯電力系統模型基礎上建立不確定時滯電力系統模型。構建新的增廣型Lyapunov-Krasovskii泛函,引用Bessel-Legendre不等式方法處理所提Lyapunov-Krasovskii泛函導數中的積分項,計算得到不確定時滯穩定判據。通過和現有文獻對比,驗證所提方法的優越性。根據得到的穩定判據,應用參數調整法及線性矩陣不等式技術設計出無記憶狀態反饋控制器和有記憶狀態反饋控制器,通過典型二階時滯系統、單機無窮大系統分析驗證了兩種控制器的鎮定作用。
電力系統;時變時滯;魯棒鎮定控制器
1 引言
隨著智能電網發展,現代電力系統更加趨向于多互聯,大規模方向發展,因此僅依賴傳統的區域信號控制方法將無法滿足系統對性能的要求。近些年,隨著同步相量測量裝置技術,全球定位系統技術和現代電力通信技術的廣域測量系統的應用,使得將本地電力系統信息同步采樣并傳送至遠程控制中心成為可能,這就可以通過廣域控制器對電力系統進行協調控制[1]。但是,電網廣域監測系統(Wide area measurement system, WAMS)的應用將電力系統變成了一個時滯系統,各類廣域控制信道中難免存在時滯,直接影響到電力系統的穩定性。因此,研究電力系統所能承受的時滯穩定裕度是很有意義的。此外,為了保證電力系統穩定運行,研究電力系統時滯鎮定器的設計也具有非常重要的意義。

文章基于常時滯電力系統模型基礎上,建立了時變時滯(即時滯不確定)電力系統模型,構建新的增廣LK泛函,應用文獻[21]中Bessel-Legendre不等式估計該泛函的導數,以改善時變時滯電力系統的最大時滯上界。再應用參數調整法[22]進行時變時滯電力系統魯棒鎮定控制器設計,通過典型二階時滯系統和單機無窮大電力系統進行實例驗證、模型仿真,證明了文章方法的實用性和優越性。
2 系統模型
在進行時滯電力系統穩定性分析時,通常建立簡單的系統模型,達到對系統基本性能和概念的理解。本文主要從單機無窮大系統著手研究,以此為基礎,從而可以分析更加復雜的大型網絡系統。
單機無窮大系統模型主要由一個發電機組(原動機、發電機以及勵磁系統等)、變壓器、輸電線路以及理想化的無窮大母線端構成。單機無窮大系統簡化模型見圖1。

圖1 單機無窮大系統
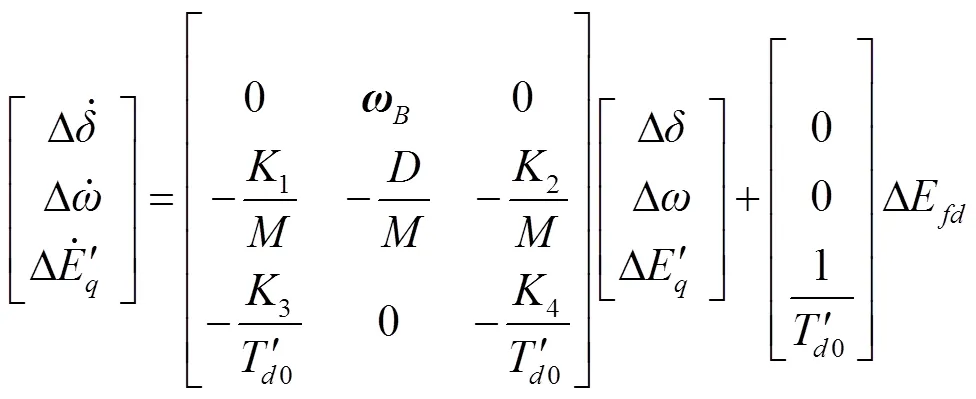
本節主要討論三階矩陣模型的單機無窮大電力系統,常用的模型方程如下
其中
發電機的機端電壓為
其中
文章討論基于自動電壓調節勵磁控制系統的時滯相關魯棒性,假定在機組電壓測量時存在時滯,得到下列狀態方程






式(7)轉變為下列時變時滯線性電力系統模型

考慮給系統設計反饋控制器

3 穩定判據
為了得到文章定理判據,下面介紹幾種引理。
引理1[21]:定義是在區間[,]?R上的可導函數,對于適當維數實對稱矩陣>0,任意適當維數矩陣,有積分不等式(11)成立

其中
為得到文章的判據,首先定義向量、矩陣如下
=1, 2








基于Bessel-Legendre不等式并結合自由權矩陣方法,得到時變時滯電力系統的穩定判據如下。
證明:根據Lyapunov穩定理論,構建新的增廣型LK泛函如下


由引理1得
對于適當維數任意矩陣,有以下等式成立

考慮到適當維數任意矩陣(=1, 2, 3),有以下等式成立
結合式(16)~(20),得

4 控制器設計
4.1 無記憶反饋控制器設計

式中,表示適當維數的常數矩陣。


其中
其他各項參考定理1。
4.2 有記憶反饋控制器設計

式中,表示適當維數的常數矩陣。
其中
其他各項參考定理2。
5 算例分析
5.1 典型二階系統
常見的二階系統如下所示

若使用無記憶狀態反饋控制器鎮定時,所得時滯穩定裕度為h=0.691 6 s,此時控制器的反饋增益[K1]= [0.598 8-2.208 3],圖2為該系統狀態變量響應曲線。
若使用有記憶狀態反饋控制器鎮定時,所得時滯穩定裕度為=0.691 6 s,此時控制器的反饋增益如下,此時的狀態變量響應曲線如圖3所示。
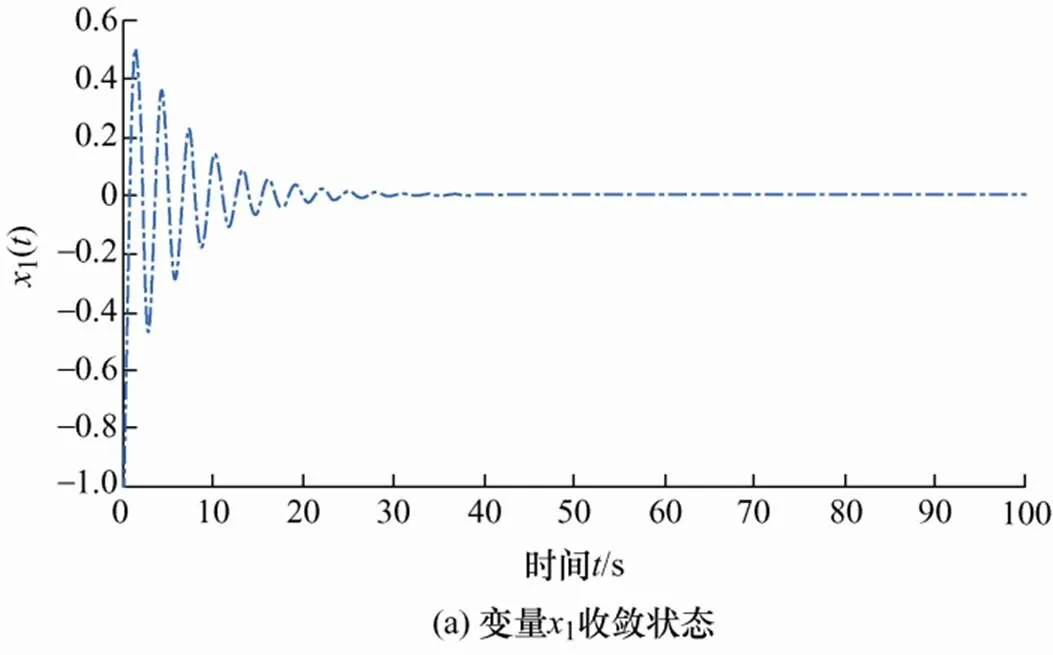
通過對比文獻[23]獲得的時滯上界=0.656 9 s,體現出所提方法有一定的優越性。雖然無記憶控制器和有記憶控制器求得的最大時滯上界相同,但是可以從圖2、3中看出,有記憶反饋控制器在收斂速度上明顯優于無記憶控制器。
5.2 單機無窮大系統
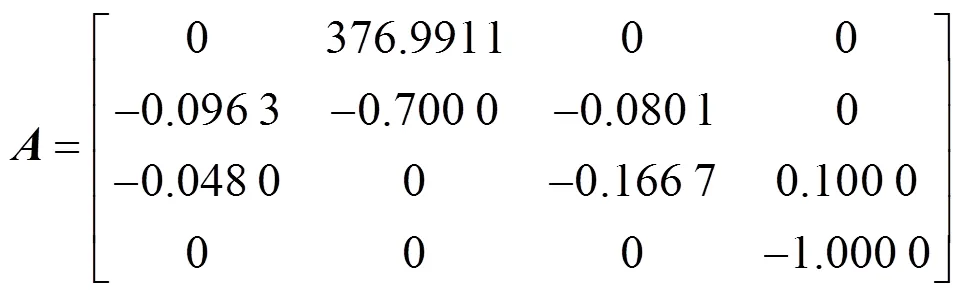
考慮單機無窮大系統時,參照文獻[23],系統矩陣參數、1和分別為
若使用無記憶狀態反饋控制器鎮定時,所得時滯穩定裕度為=0.143 2 s,此時控制器的反饋增益圖4為該系統狀態變量響應曲線。

若使用有記憶狀態反饋控制器鎮定時,所得時滯穩定裕度為=0.143 2 s,此時控制器的反饋增益如下,此時的狀態變量響應曲線如圖5所示。
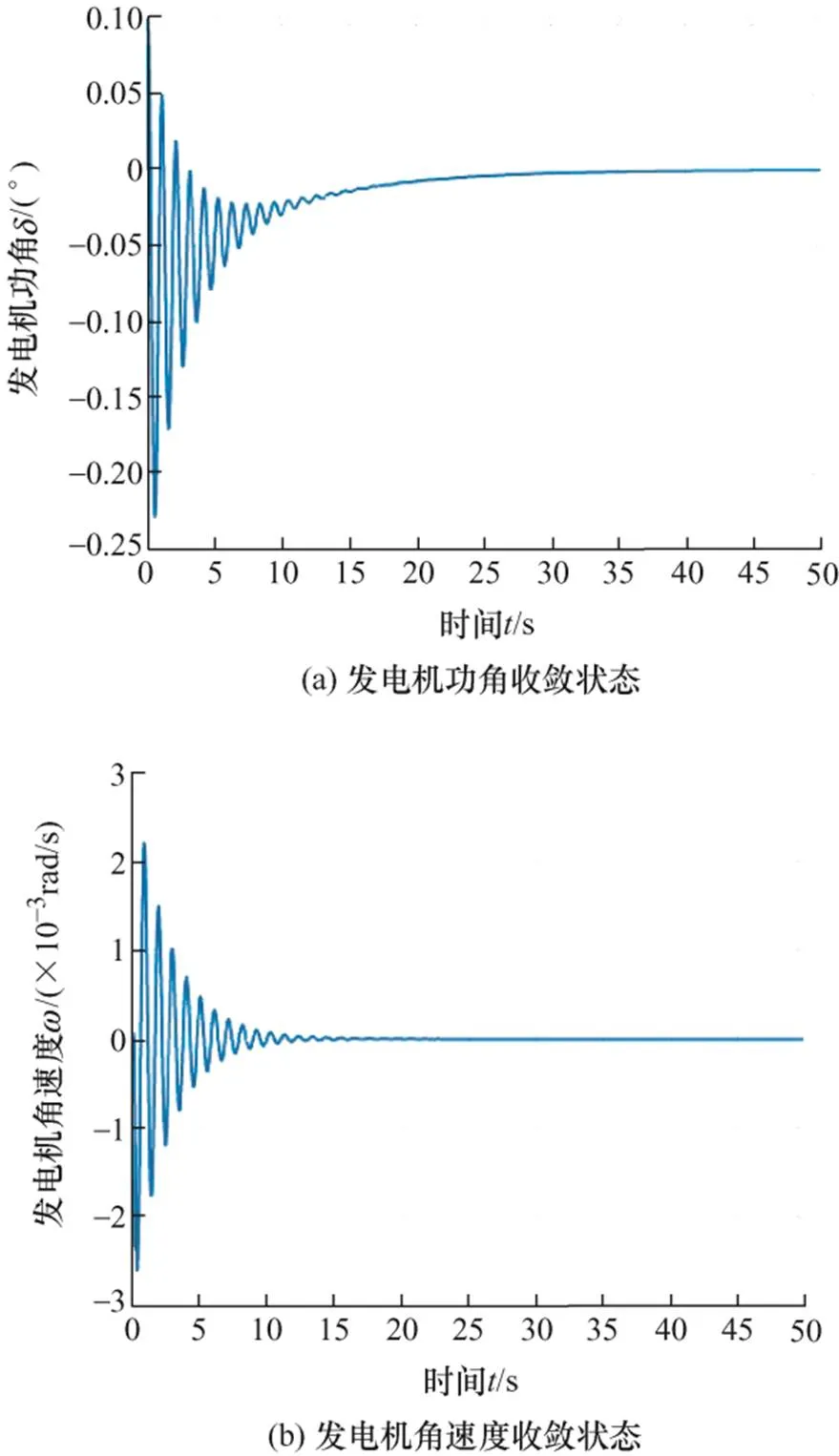
圖5 有記憶控制器作用下的系統仿真結果
通過對比文獻[23]的時滯上界=0.140 7 s,體現出所提方法有一定的優越性。
當取0.1 s/0.01 s/0.001 s時,在無記憶控制器作用下,求得控制器增益參數見表1,單機無窮大系統的仿真結果如圖6所示。
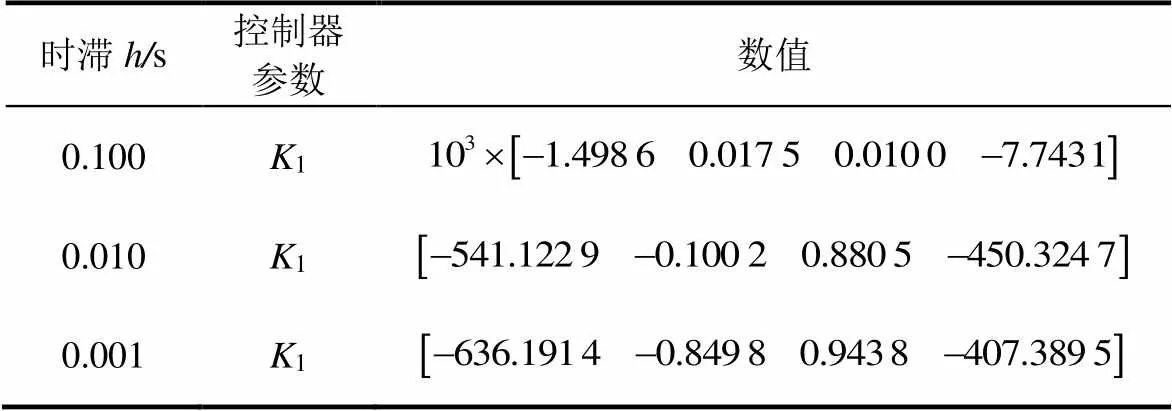
表1 不同h值下的無記憶控制器參數
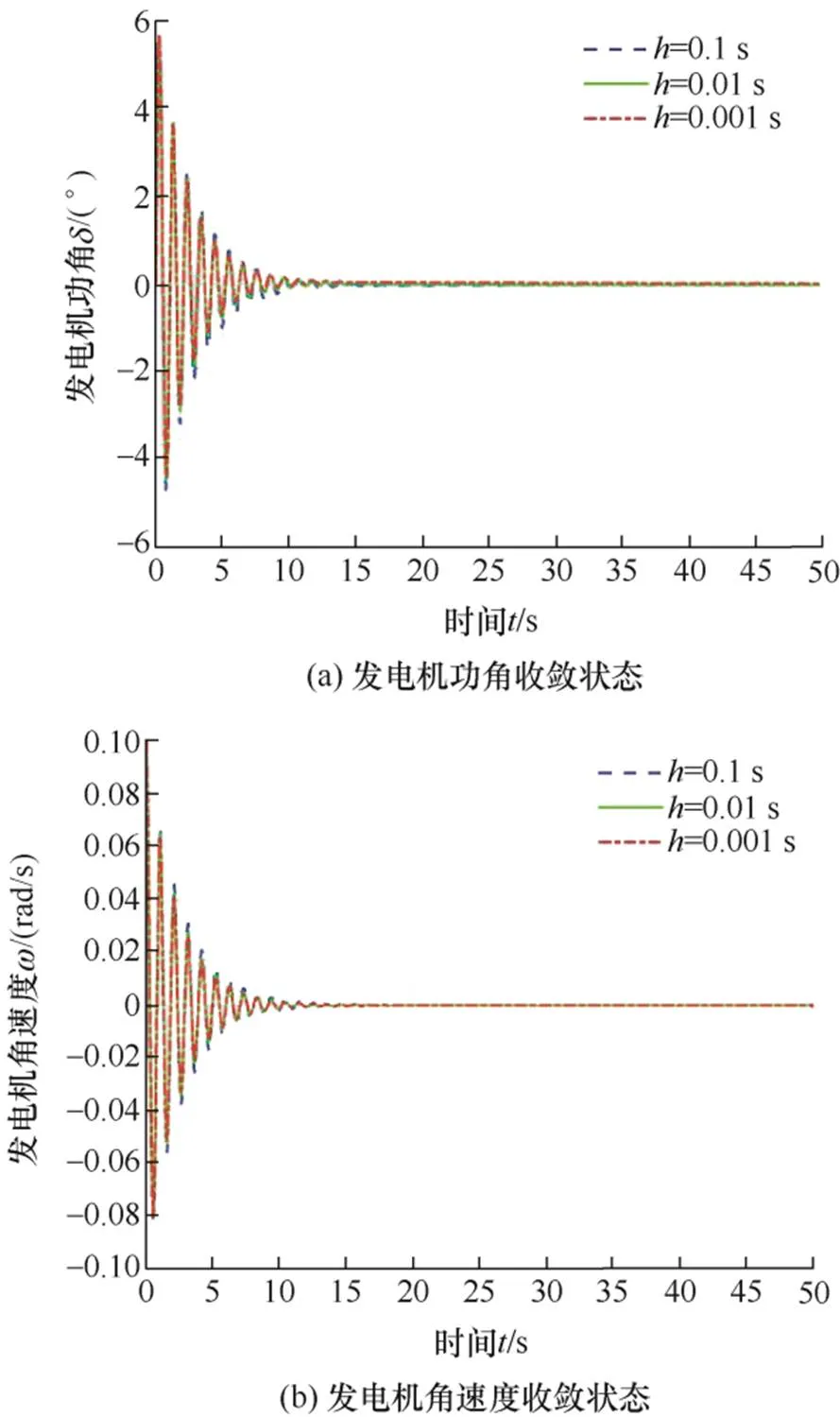
圖6 不同h值下無記憶控制器作用下的仿真結果
當取0.1 s/0.01 s/0.001 s時,在有記憶控制器作用下,求得控制器增益參數見表2,單機無窮大系統的仿真結果如圖7所示。
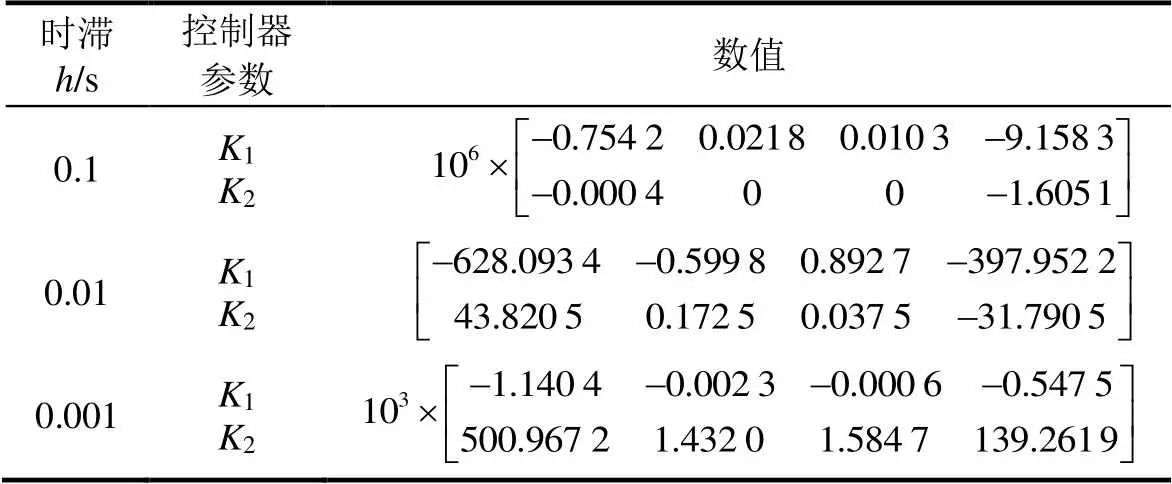
表2 不同h值下的有記憶控制器參數
由圖6、7可知,在單機無窮大系統中,無論是記憶狀態反饋控制器還是有記憶狀態反饋控制器,在不同時滯中的鎮定控制效果差異不大。
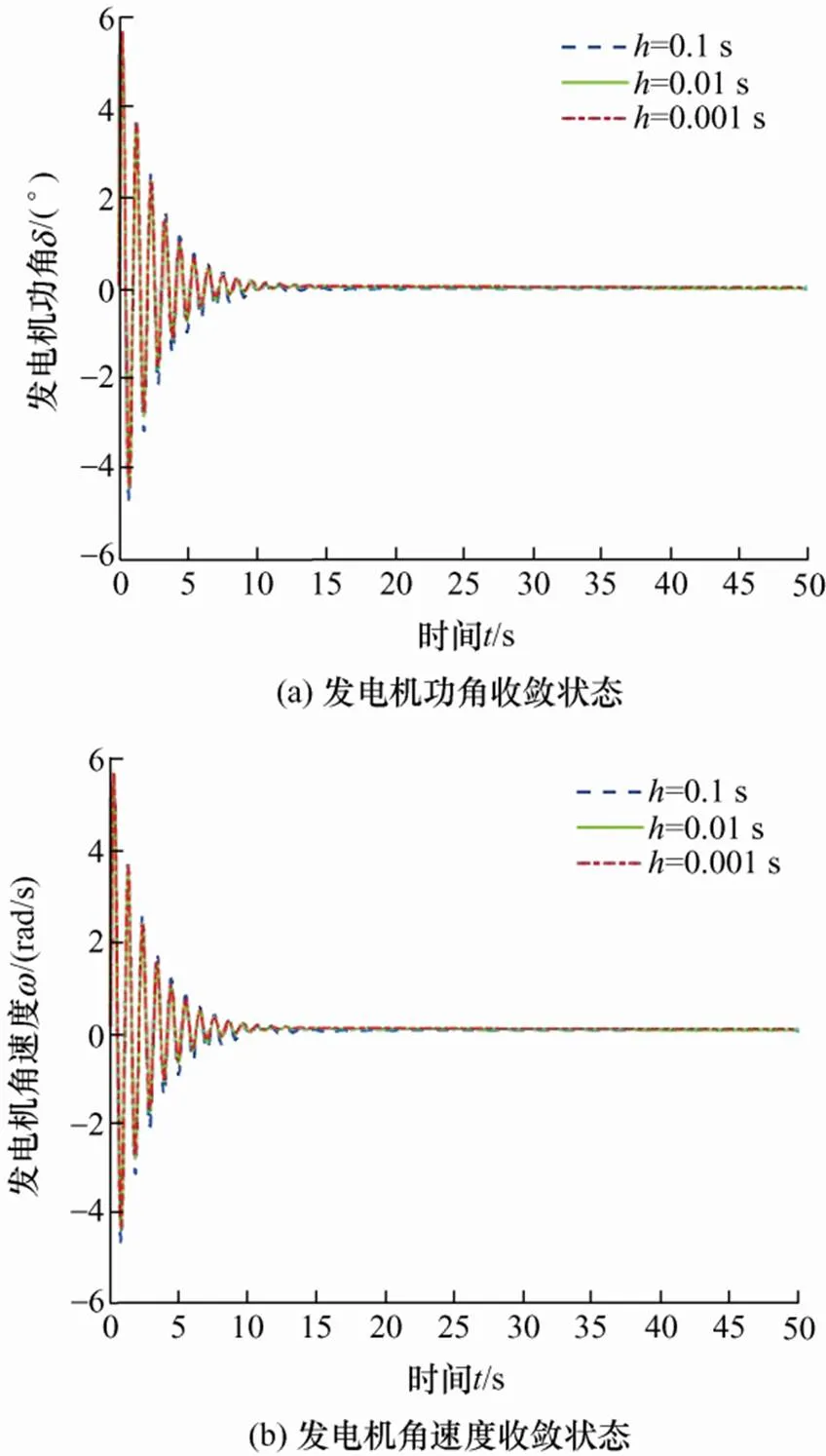
圖7 不同h值下有記憶控制器作用下的仿真結果
由圖8可知,在=0.143 2 s時,有記憶狀態反饋控制器和無記憶狀態反饋控制器對系統鎮定控制作用幾乎相同;但是沒有控制器作用時,單機無窮大系統是不穩定的。
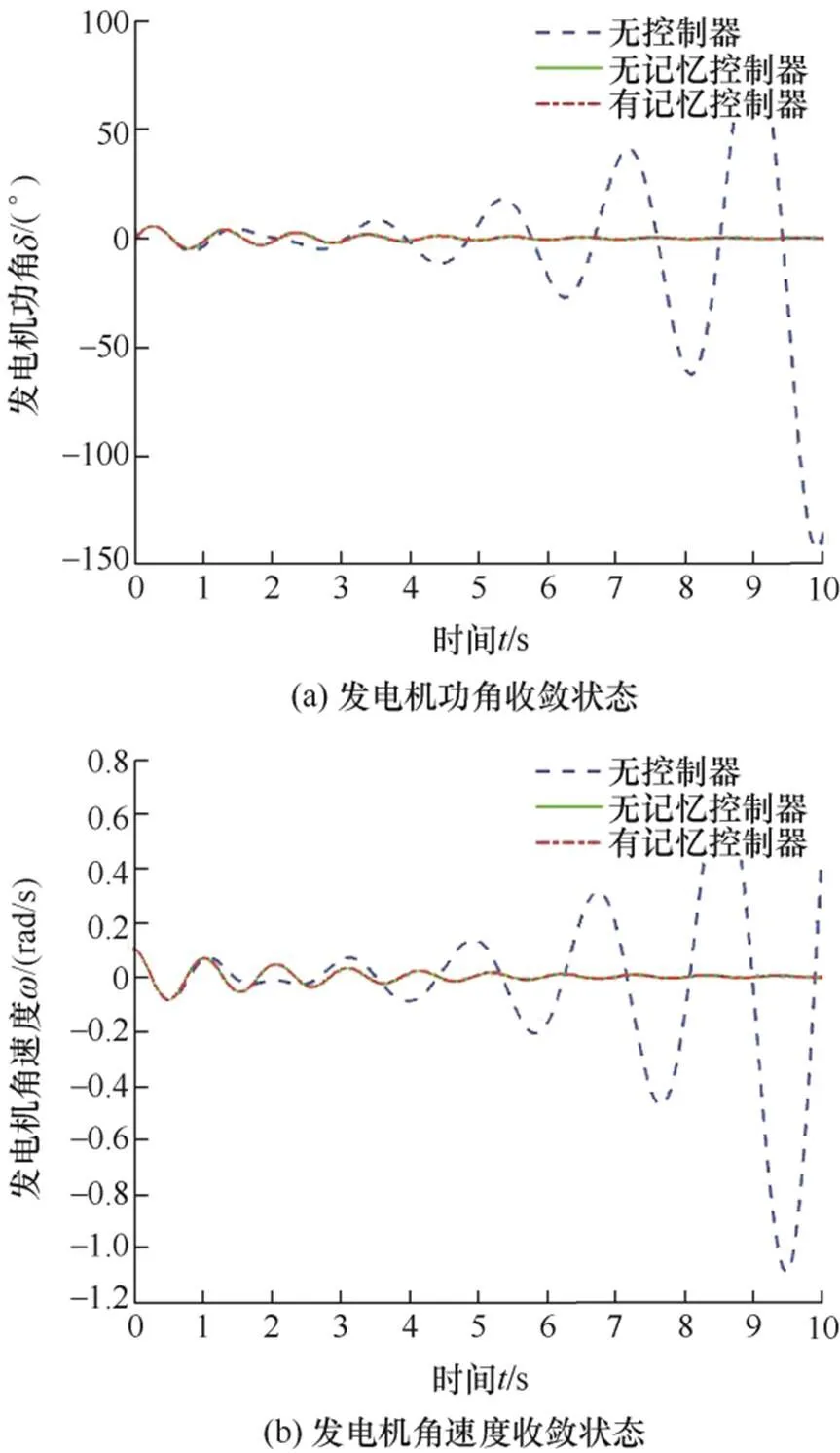
圖8 有控制器與無控制器的系統響應曲線
6 結論
(1) 建立了時變時滯(即時滯不確定)電力系統模型,考慮時滯情況比較全面。
(2) 通過構建合適的增廣Lyapunov泛函,應用Bessel-Legendre不等式處理泛函導數中的積分項,大大提高了時變時滯電力系統的時滯上界。
(3) 再應用參數調整法進行時變時滯電力系統無記憶和有記憶魯棒鎮定控制器設計,通過分析和比較,兩種實例驗證、模型仿真證明了文章方法的優越性和實用性。
[1] MEESSINA A R. Inter-area oscillations in power systems[M]. New York:Springer,2009.
[2] ZHANG X M,HAN Q L. State estimation for static neural networks with time-varying delays based on an improved reciprocally convex inequality[J]. IEEE Trans. Neural Netw. Learn Syst.,2018,29(4):1376-1381.
[3] 賈宏杰,謝星星,余曉丹. 考慮時滯影響的電力系統小擾動穩定域[J]. 電力系統自動化,2006,30(21):1-5.
JIA Hongjie,XIE Xingxing,YU Xiaodan. Power system small signal stability region with time delay considered[J]. Automation of Electric Power Systems,2006,30(21):1-5.
[4] 賈宏杰,陳建華,余曉丹. 時滯環節對電力系統小擾動穩定性的影響[J]. 電力系統自動化,2006,30(5):5-8,17.
JIA Hongjie,CHEN Jianhua,YU Xiaodan. Impact of time delay on power system small signal stability[J]. Automation of Electric Power Systems,2006,30(5):5-8,17.
[5] 賈宏杰,尚蕊,張寶貴. 電力系統時滯穩定裕度求解方法[J]. 電力系統自動化,2007,31(2):5-11.
JIA Hongjie,SHANG Rui,ZHANG Baogui. Computation of delay stability margin of electric power systems[J]. Automation of Electric Power Systems,2007,31(2):5-11.
[6] 賈宏杰,安海云,余曉丹. 電力系統改進時滯依賴型穩定判據[J]. 電力系統自動化,2008,32(19):15-19.
JIA Hongjie,AN Haiyun,YU Xiaodan. An improved delay-dependent stability criteria for power system with multiple time delays[J]. Automation of Electric Power Systems,2008,32(19):15-19.
[7] ZENG H B,HE Y,WU M,et al. New results on stability analysis for systems with discrete distributed delay[J]. Automatica,2015,60(10):189-192.
[8] WU M,HE Y,SHE J H. New delay-dependent stability criteria and stabilizing method for neutral systems[J]. IEEE Trans. on Automatic Control,2004,49(12):2266-2271.
[9] PARK P G,KO J W. Stability and robust stability for systems with a time-varying delay[J]. Automatica,2007,43(10):1855-1858.
[10] 賈宏杰,安海云,余曉丹. 電力系統時滯依賴型魯棒穩定判據及其應用[J]. 電力系統自動化,2010,34(3):6-11.
JIA Hongjie,AN Haiyun,YU Xiaodan. A delay-dependent robust stability criterion for power system amd its application[J]. Automation of Electric Power Systems,2010,34(3):6-11.
[11] 董朝宇,賈宏杰,姜懿郎. 含積分二次型的電力系統改進時滯穩定判據[J]. 電力系統自動化,2015,39(24):35-40.
DONG Chaoyu,JIA Hongjie,JIANG Yilang. Time-delay stability criteria for power system with integral quadratic from[J]. Automation of Electric Power Systems,2015,39(24):35-40.
[12] 李曉萌,賈宏杰. 電力系統改進時滯依賴型魯棒穩定判據[J]. 電力系統及其自動化學報,2018,30(4):114-120.
LI Xiaomeng,JIA Hongjie. Improved time-delay- dependent robust stability criteria for power system[J]. Proceedings of the CSU-EPSA,2018,30(4):114-120.
[13] 李寧,孫永輝,衛志農,等. 基于Wirtinger不等式的電力系統延時依賴穩定判據[J]. 電力系統自動化,2017,41(2):108-113.
LI Ning,SUN Yonghui,WEI Zhinong,et al. Delay-dependent stability criteria for power system based on Wirtingers intergral inequality[J]. Automation of Electric Power Systems,2017,41(2):108-113.
[14] 孫永輝,李寧,衛志農,等. 多時滯不確定電力系統的改進時滯依賴魯棒穩定判據[J]. 電力系統自動化,2017,41(16):117-122.
SUN Yonghui,LI Ning,WEI Zhinong,et al. Improved robust delay-dependent stability crriteria for power systems with multiple time delays and uncertain parameters[J]. Automation of Electric Power Systems,2017,41(16):117-122.
[15] 孫勇,李志民,于繼來. 基于最小熵H控制的降階電力系統穩定器設計[J]. 吉林大學學報,2010,40(2):523-528.
SUN Yong,LI Zhiming,YU Jilai. Design of reduced-order power system stabilizer based on minimum entropyHtheory[J]. Journal of Jilin Unversity,2010,40(2):523-528.
[16] 石頡,王成山. 基于線性矩陣不等式理論的廣域電力系統狀態反饋控制器設計[J]. 電網技術,2008,32(6):36-41.
SHI Jie,WANG Chengshan. Design of state feedback controller for wide-area power system based on linear matrix inequalities theory[J]. Power System Technology,2008,32(6):36-41.
[17] 俞立. 魯棒控制:線性矩陣不等式處理方法[M]. 北京:清華大學出版社,2002.
YU Li. Robust control:Linear matrix inequality approach[M]. Beijing:Tsinghua University Press,2002.
[18] QI J,JIANG Q Y,WANG G Z,et al. Wide-area time-delay robust damping control for power system[J]. European Trans. on Electrical Power,2009,19(7):899-910.
[19] 袁金鵬,王秀明,姜志國. 基于LMI的電力系統廣域附加阻尼控制[J]. 東北電力大學學報,2009(4):50-54.
YUAN Jinpeng,WANG Xiuming,JIANG Zhiguo. Design of additional damped controller using LMI in power system[J]. Journal of Northeast Electric Power University,2009(4):50-54.
[20] SOLIMAN A H,ELSHAFEI A L,BENDARY F,et al. LMI static output-feedback design of fuzzy power system stabilizers[J]. Expert Systems with Applications,2009,36(3):6817-6825.
[21] ZHANG X M,HAN Q L,SEURET A,et al. Overview of recent advances in stability of liner systems with time-varying delay[J]. IET Control Theory and Applications,2019,13(1):1-16.
[22] BOYD S,GHAOUI L,FERON E,et al. Linear matrix inequalities in system and control theory[M]. Philadelphia:SIAM,1994.
[23] 王真. 廣域測量時變時滯電力系統穩定性分析與控制[D]. 株洲:湖南工業大學,2019.
WANG Zhen. Wide-area measurement of time-varying delay power system stability analysis and control[D]. Zhuzhou:Hunan University of Technology,2019.
Robust Stabilization Controller Design for Power Systems with Time Varying Delay
SHEN Li1SHEN Yuan2ZHOU Hao2
(1. Municipal Planning and Engineering Design Institute of Jiangsu Provincial Planning and Design Group, Nanjing 210036;2. The 28thResearch Institute of China Electronics Technology Group Corporation, Nanjing 210007)
For the uncertain time-delay systems, the uncertain time-delay power system model is established based on the constant time-delay power system model. By using Bessel-Legendre inequality method to deal with the integral term in the derivative of the new augmented Lyapunov-Krasovskii functional, an uncertain delay stability criterion with less conservativeness is obtained. Compared with the existing literature, the superiority of the proposed method is verified. According to the obtained stability criteria, the memoryless feedback controller and the feedback controller with memory are designed by parameter adjustment method and LMI technology. The stabilization of the controllers is verified by the analysis of the typical second-order delay system and the single machine infinite bus system.
Power systems;time-varying delay;robust controller
10.11985/2021.04.022
TM712
20201228收到初稿,20211101收到修改稿
沈力,男,1992年生,碩士,工程師。主要研究方向為電力系統穩定性、市政電力規劃。E-mail:18219920108@163.com
沈媛(通信作者),女,1989年生,碩士,工程師。主要研究方向為信息系統總體與集成技術。E-mail:shenyuan1989@126.com
周浩,男,1989年生,碩士,工程師。主要研究方向為信號與信息系統、系統集成方向。E-mail:563361587@qq.com
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
作文周刊·小學一年級版(2016年27期)2017-06-03 23:21:17
光學精密工程(2016年6期)2016-11-07 09:07:19
新湘評論·下半月(2016年4期)2016-05-05 22:12:41
