基于機器學(xué)習(xí)算法的交通標志圖像智能識別
2021-01-28 03:35:42曹海燕張大維
微型電腦應(yīng)用 2021年1期
曹海燕, 張大維
(中國傳媒大學(xué)南廣學(xué)院 傳媒技術(shù)學(xué)院, 江蘇 南京 211172)
0 引言
隨著道路交通不斷的增長,再加上我國經(jīng)濟迅速發(fā)展,機動車保有量的數(shù)量增長十分明顯,尤其家用汽車數(shù)量增速最快,道路交通需求與機動車數(shù)量之間矛盾越來越突出,道路交通安全面臨嚴峻的挑戰(zhàn),在此背景下出現(xiàn)了智能輔助駕駛系統(tǒng)[1-2]。智能輔助駕駛系統(tǒng)集成了人工智能、計算機視覺等先進技術(shù),可以實時感知車輛周圍環(huán)境,降低事故發(fā)生概率[3]。交通標志圖像智能識別是智能輔助駕駛系統(tǒng)最為關(guān)鍵的內(nèi)容,通過計算機視覺技術(shù)對交通標志圖像進行檢測和識別,然后將結(jié)果反饋給駕駛員,從而對行駛車輛進行及時控制,因此交通標志圖像識別具有十分重要的社會和學(xué)術(shù)價值[4]。
交通標志圖像識別從本質(zhì)上講是一種分類問題,國外一些發(fā)達國家對識別交通標志圖像的研究時間早,交通標志圖像識別成熟,而國內(nèi)由于機動車出現(xiàn)時間晚,對交通標志圖像識別起步晚,但由于我國對交通標志圖像識別研究投入大,目前存在許多交通標志圖像識別方法[5-6],當(dāng)前主要有最近鄰域法的交通標志圖像識別方法、決策樹分類法的交通標志圖像識別方法、人工神經(jīng)網(wǎng)絡(luò)的交通標志圖像識別方法、支持向量機的交通標志圖像識別方法[7-9],這些方法均有各自的優(yōu)勢,但是缺陷也十分明顯,如最近鄰域法的交通標志圖像識別時間長、實時性差;決策樹分類法的交通標志圖像識別速度快,但是交通標志圖像的誤識率極高;人工神經(jīng)網(wǎng)絡(luò)的交通標志圖像識別的抗干擾能力差、結(jié)果不穩(wěn)定;支持向量機的交通標志圖像識別時間長、速度慢[10-12]。
針對當(dāng)前交通標志圖像識別過程中存在的問題,以提高交通標志圖像識別準確率和識別速度為目標,提出基于機器學(xué)習(xí)算法的交通標志圖像智能識別方法,與傳統(tǒng)交通標志圖像識別方法進行了仿真對照測試結(jié)果表明,本文方法的交通標志圖像識別正確率得到了提高,可以滿足交通標志圖像識別實際要求,減少了交通標志圖像識別時間,可以實現(xiàn)實時的交通標志圖像識別。
1 機器學(xué)習(xí)算法的交通標志圖像智能識別方法
1.1 交通標志圖像的預(yù)處理
由于外界環(huán)境的干擾,采集原始交通標志圖像存在的噪聲,同時交通標志圖像采集通常在戶外進行,易受光照變化的影響,使得交通標志圖像對比度低,各種交通標志圖像尺寸不一樣,因此需要對原始交通標志圖像進行預(yù)處理,基本過程為:首先采用小波變換對原始交通標志圖像進行濾波處理,去掉交通標志圖像中的噪聲,消除噪聲對交通標志圖像識別特征的不利影響;然后采用直方均衡算法對去噪后的圖像進行增強處理,消除光照變化的干擾,提高交通標志圖像的對比度,使交通標志圖像更加清晰;最后對所有交通標志圖像尺寸進行歸一化操作,使它們具有大小相同。
綜合上述,交通標志圖像的預(yù)處理流程,如圖1所示。
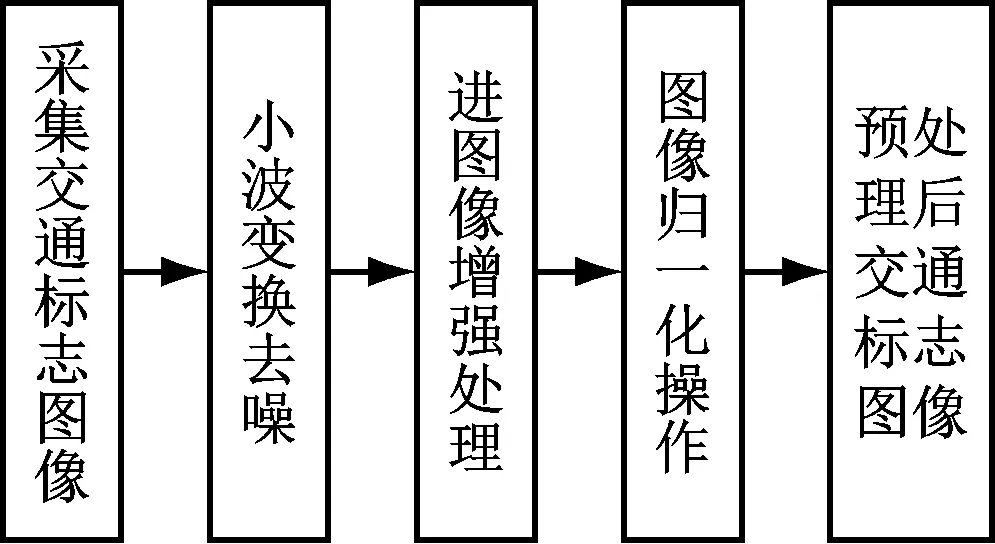
圖1 交通標志圖像預(yù)處理流程
對于一幅視覺效果差的交通標志圖像,如圖2所示。

圖2 原始交通標志圖像
通過預(yù)處理后,如圖3所示。

圖3 預(yù)處理后的交通標志圖像
由圖3可知,交通標志圖像效果得到了明顯的改善。
1.2 提取交通標志圖像特征
1.2.1 交通標志圖像的形狀特征
方向梯度直方圖特征是一種交通標志圖像局部特征,可以描述交通標志圖像的形狀,因此本文將方向梯度直方圖特征作為交通標志圖像識別的一種特征,具體提取步驟如下。
(1) 對預(yù)處理的交通標志圖像進行g(shù)amma標準化處理,降低圖像的局部陰影,如式(1)。
I(x,y)=I(x,y)gamma
(1)
(2) 計算交通標志圖像像素點(x,y)的水平和垂直梯度,如式(2)、式(3)。
Gx(x,y)=H(x+1,y)-H(x-1,y)
(2)
Gy(x,y)=H(x,y+1)-H(x,y-1)
(3)
式中,H(x,y)表示點(x,y)的像素值。
點(x,y)的梯度幅值和梯度方向,如式(4)、式(5)。

(4)

(5)
(3) 將交通標志圖像劃分為多個單元,統(tǒng)計每一個單元的梯度信息,對交通標志圖像的全部像素點、梯度方向進行投影和加權(quán),得到方向梯度直方圖的特征向量。
(4) 由于方向梯度直方圖的特征向量的值不一樣,因此對它們進行歸一化,得到歸一化后的方向梯度直方圖的特征向量,如圖4所示。

圖4 方向梯度直方圖特征的提取流程
1.2.2 交通標志圖像的紋理特征
局部二值模式特征也是一種交通標志圖像局部特征,可以描述交通標志圖像的紋理分布情況,因此本文將局部二值模式特征作為交通標志圖像識別的一種特征,具體提取步驟如下。
(1) 確定檢測窗口,并根據(jù)檢測窗口的大小將交通標志圖像劃分為多個單元;
(2) 計算交通標志圖像檢測窗口的中心像素點局部二值模式特征;
(3) 計算交通標志圖像計算所有單元的直方圖;
(4) 將計算所有單元的直方圖連接在一起,得到交通標志圖像的局部二值模式特征,并進行歸一化處理,如圖5所示。
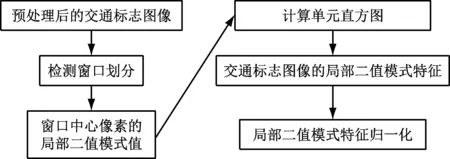
圖5 局部二值模式特征的提取流程
1.3 極限學(xué)習(xí)機算法設(shè)計交通標志圖像識別的分類器
極限學(xué)習(xí)機算法是一種新型的機器學(xué)習(xí)算法,采用單隱含層,與傳統(tǒng)人工神經(jīng)網(wǎng)絡(luò)不一樣,避免了反復(fù)迭代調(diào)整連接權(quán)值的過程,訓(xùn)練時間大幅度減少,訓(xùn)練效率高[13],為此本文引入其設(shè)計交通標志圖像識別的分類器。
設(shè)交通標志圖像訓(xùn)練樣本集合為(xi,yi),i=1,2,…,n,xi表示輸入向量,yi表示輸出向量,L表示隱含層節(jié)點數(shù),那么極限學(xué)習(xí)機算法,如式(6)。

(6)
極限學(xué)習(xí)機學(xué)習(xí)和訓(xùn)練的目標是輸出誤差最小,如式(7)。
(7)
存在一組:βi,wi,bi,滿足如下條件,如式(8)。
(8)
采用矩陣表示式(8),如式(9)。
Hβ=T
(9)
(10)

(11)
1.4 機器學(xué)習(xí)算法的交通標志圖像智能識別原理
機器學(xué)習(xí)算法的交通標志圖像智能識別原理具體為:首先采集交通標志圖像,并對其進行預(yù)處理,提高交通標志圖像質(zhì)量;然后提取交通標志圖像的方向梯度直方圖特征和局部二值模式特征,將其作為極限學(xué)習(xí)機的輸入,并將交通標志圖像類型作為輸出;最后確定極限學(xué)習(xí)機的相關(guān)參數(shù),并通過學(xué)習(xí),建立可以描述交通標志圖像類型和特征之間的分類器,如圖6所示。

圖6 機器學(xué)習(xí)算法的交通標志圖像智能識別原理
2 應(yīng)用實例
2.1 測試環(huán)境
為了分析機器學(xué)習(xí)算法的交通標志圖像智能識別效果,對其進行仿真分析,如表1所示。
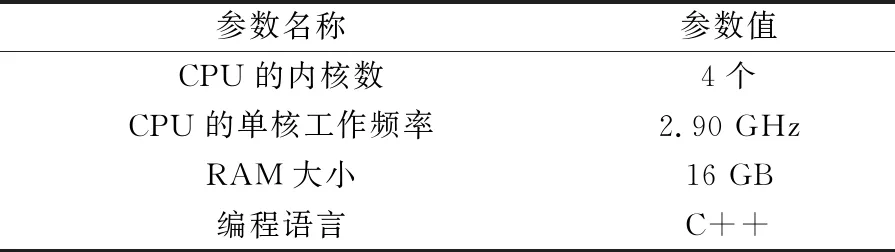
表1 交通標志圖像智能識別的測試環(huán)境
在相同測試環(huán)境下,選擇BP神經(jīng)網(wǎng)絡(luò)的交通標志圖像識別方法和支持向量機的交通標志圖像識別方法、最近鄰域法的交通標志圖像識別方法、決策樹分類法的交通標志圖像識別方法進行對比測試。
2.2 測試數(shù)據(jù)
采用交通標志圖像識別數(shù)據(jù)集(German Traffic Sign Recognition Benchmark,GTSRB)作為實驗對象,該數(shù)據(jù)集包括43類交通標志圖像,代表性的交通標志圖像,如圖7所示。

圖7 部分交通標志圖像
2.3 測試結(jié)果與分析
采用5種方法對交通標志圖像進行識別測試,統(tǒng)計它們的正確率和識別時間,如表2所示。
由表2可知,
(1) 最近鄰域法、決策樹分類法的交通標志圖像識別正確率低,這是因為它們認為交通標志圖像類型和特征向量是一種線性變化關(guān)系,這與實際情況相不符,雖然它們的交通標志圖像識別時間短、速度快,但無法應(yīng)用于實際的交通智能管理系統(tǒng)中。
(2) BP神經(jīng)網(wǎng)絡(luò)和支持向量機的交通標志圖像識別正確率要高于最近鄰域法、決策樹分類法,這是因為它們屬于傳統(tǒng)機器學(xué)習(xí)算法,可以較好描述交通標志圖像類型和特征向量是非線性變化關(guān)系,但它們的交通標志圖像識別時間長、效率低,無法滿足交通智能管理的實時性要求。
(3) 本文方法的交通標志圖像識別正確率要明顯高于當(dāng)前其它方法,而且識別的速度快,獲得了整體性能更優(yōu)的交通標志圖像識別結(jié)果,主要是由于引入極限學(xué)習(xí)機算法加快了交通標志圖像識別的訓(xùn)練速度,解決了當(dāng)前交通標志圖像識別過程中存在的難題,對比測試結(jié)果驗證了本文交通標志圖像識別方法的優(yōu)越性。
3 總結(jié)
為了減少交通標志圖像識別錯誤率,加快交通標志圖像識別速度,在分析當(dāng)前交通標志圖像識別方法的基礎(chǔ)上,提出了基于機器學(xué)習(xí)算法的交通標志圖像智能識別方法,結(jié)果表明,交通標志圖像識別正確率較高、結(jié)果穩(wěn)定、可靠,為交通標志圖像識別研究提供了一種新的工具。
猜你喜歡
數(shù)學(xué)小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
世界科學(xué)技術(shù)-中醫(yī)藥現(xiàn)代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
表面工程與再制造(2019年6期)2019-08-24 06:40:04
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46