一種正射影像拉花現象的處理方法
2021-01-26 08:37:06郭永春彭桂輝
地理空間信息 2021年1期
郭永春,柴 智,彭桂輝
(1.中煤航測遙感集團有限公司,陜西 西安 710054;2.北京市地質調查研究院,北京 102206)
正射影像制作是同時消除地形起伏和相片傾斜引起的影像變形的過程[1]。正射影像是對原始影像進行微分糾正和灰度重采樣的結果圖,而原始影像由于中心投影和地形起伏的影響并不能保證地面上的每個位置都能在影像中成像。因此,在數字微分糾正中,對于攝影信息充足的區(qū)域采樣較稀疏,將導致圖像出現顆粒感;而對于攝影信息匱乏的區(qū)域采樣過密或重復采樣,將出現圖像拉伸的現象,沿一個方向拉伸過度時將導致區(qū)域紋理失真,稱之為拉花現象。根據中華人民共和國測繪行業(yè)標準和國家標準的規(guī)定,正射影像在生產過程中應有嚴格的質量控制措施[2-7],拉花現象不允許出現在正射影像產品中[8-9]。
當生產過程中出現有拉花現象的正射影像時,通常是利用人工的方法尋找拉花區(qū)域,并到相應的糾正影像或原圖中去定位,從而尋找相應的紋理對拉花區(qū)域進行替補,以此來解決拉花問題[10-13]。這種人工方法費時費力,特別是在拉花區(qū)域較多的情況下,生產效率非常低。目前,針對拉花現象,已有學者展開了一些分析和研究[14],但在實際應用中對于拉花現象的處理精度和效率仍有待提高。本文深入分析了拉花現象的形成機理和深度測試的原理[15-16],并提出了基于Z-Buffer 的拉花區(qū)域檢測方法和拉花區(qū)域紋理的自動修復方法,較好地解決了拉花現象檢測和自動處理問題,在實際生產中取得了很好的應用效果,大大提高了正射影像的生產效率。
1 方法原理
攝影光線是指從攝影中心到地面點的連線,投影基線是指攝影光線在地面上的投影。由中心投影的原理可知,影像上每個像素的攝影光線都通過同一個攝影中心。因此,拉花區(qū)域的紋理一般都是偏向影像投影中心方向的失真,且在這個方向上由于地形起伏的影響地面上很長一段距離在原始影像上的成像可能非常狹窄,甚至是不能成像的。糾正時,該區(qū)域由于原圖的信息不足,從而導致糾正片出現了拉花現象,如圖1 所示。拉花現象是由沿投影方向地面上的多個點對應同一個像點所造成的,即存在“多對一”的現象,因此在灰度重采樣時,多個地面點就會使用同一個灰度值,從而產生了紋理失真,即拉花現象。然而,這種拉花現象在相鄰影像上往往不是同時存在的(圖1b),因此在檢測到相片的拉花區(qū)域時可利用鄰片的紋理進行恢復。
拉花區(qū)域的紋理也不一定能利用相鄰影像完全彌補,如圖2 所示,相片1 的拉花區(qū)域和相片2 的拉花區(qū)域存在重疊,在這種情況下,重疊區(qū)域的紋理是無法恢復的,因為該區(qū)域是整個航空攝影的盲區(qū),攝影信息在整個測區(qū)的影像中都是缺失的。此時,就不能要求精確地糾正該區(qū)域了,可考慮近似地糾正它,如采用局部均高的辦法來糾正。
綜上所述,拉花區(qū)域一般都是沿攝影方向存在多個地面點對應同一個像點的現象,這種原理跟計算機圖形學中Z-Buffer 的原理一樣[2],區(qū)別在于無需再去判斷前視點和后視點的情況,因此可在每個點攝影方向上查找是否存在多個點對應同一個像點的情況來判斷該點是否屬于拉花區(qū)域。
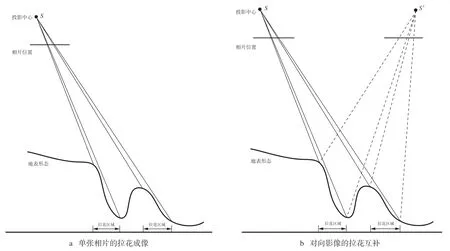
圖1 拉花現象的形成機理
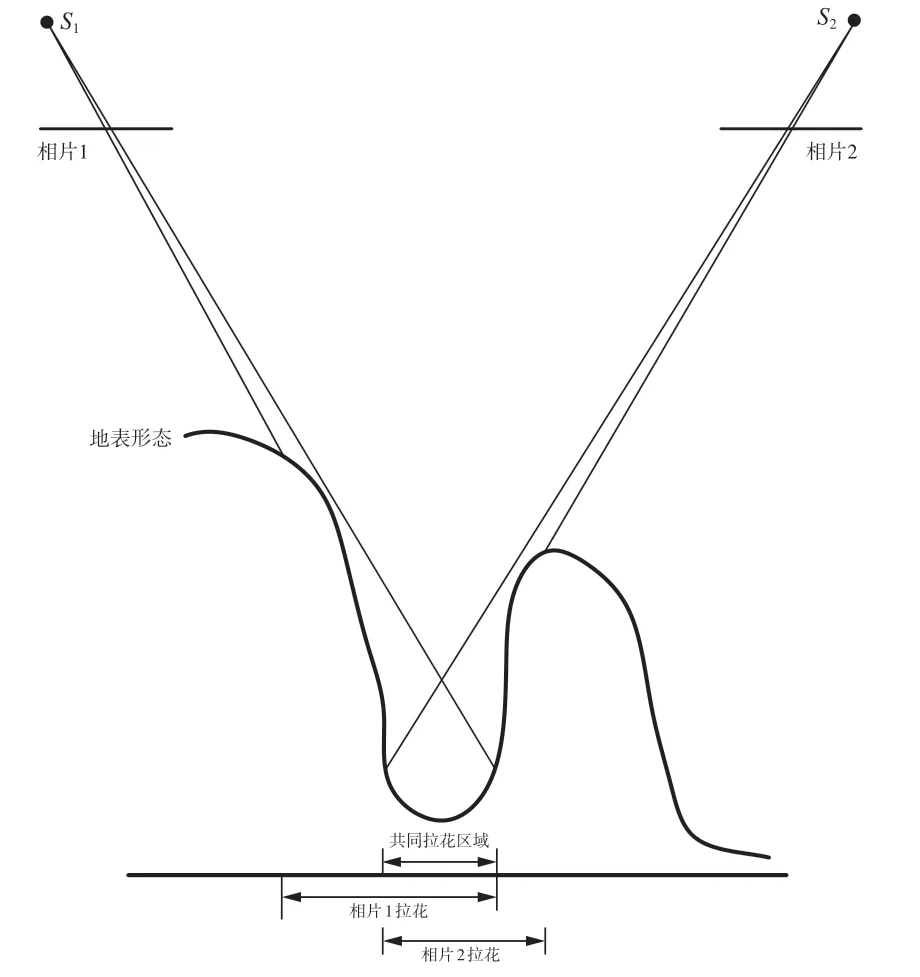
圖2 拉花盲區(qū)
由上述分析可知,若要確定某個地面點的可見性,就要搜索它到地底點之間每個點的高程與其攝影光線的高低關系,計算量很大。為了解決這個問題,本文做了3 個改進:
1)確定待檢測點相對于地底點的方位關系。已知待定點P的平面坐標(XP,YP)和地底點S的平面坐標(XS,YS),根據測量學的坐標反算公式,可得到向量PQ的方位角α為:
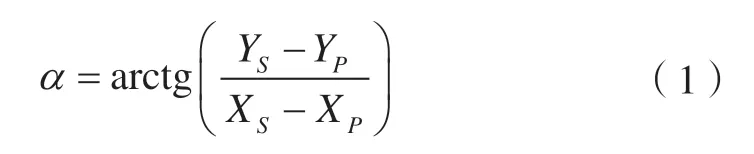
那么搜索路徑上點Q的坐標(XQ,YQ)則可由正算公式得出,即
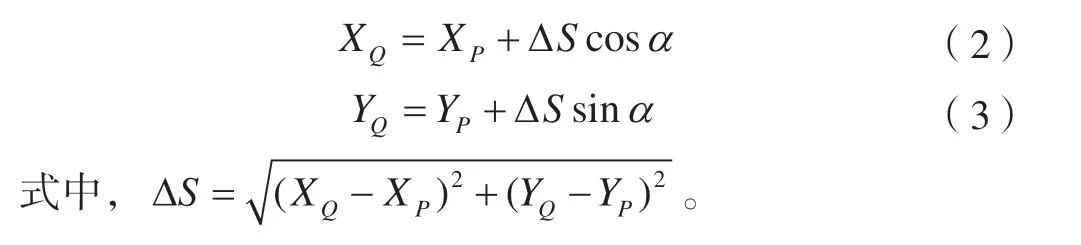
2)自適應確定搜索長度l。對于不同位置的攝影光線,根據它們到投影中心的距離,不斷調整其搜索長度。為了提高效率,無需搜索檢查點到地底點的整個長度,可根據這段長度按比例取它的一部分作為檢查路徑,即可確定其最佳的搜索長度,避免了多余的搜索路徑,大大提高了算法的運行效率。
3)基于窗口的拉花判斷策略。一般情況下,數字微分糾正是基于一個微小面元的糾正方法,因此在投影方向上選取一定的窗口對拉花面元進行檢測是比較合理的。窗口中心設置在該面元中心的投影方向上,窗口大小根據面元大小確定,如3×3、5×5 等。
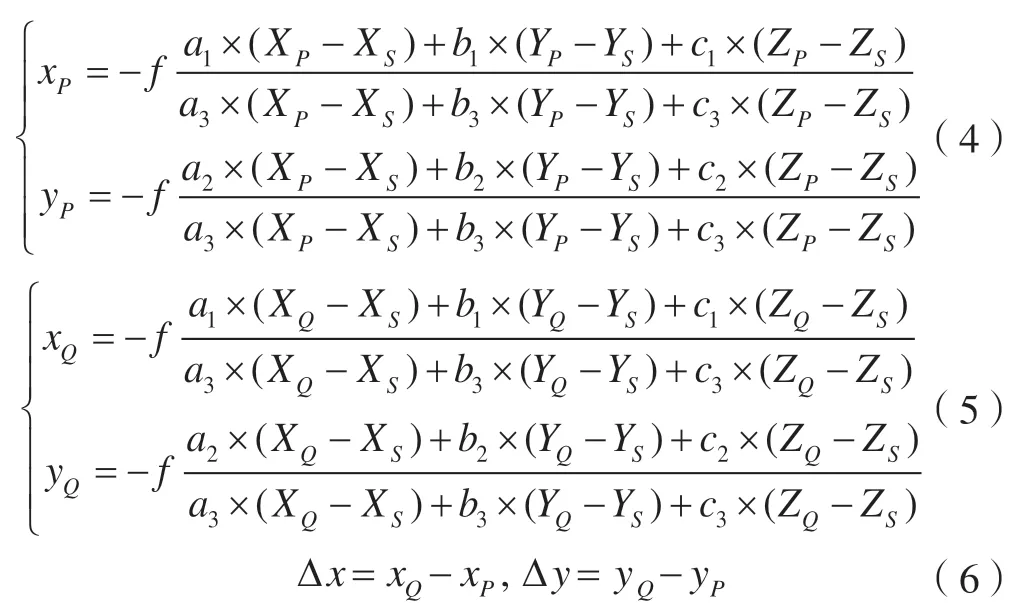
式中,XP、YP為糾正點地面坐標;XQ、YQ為移動窗口內各點地面坐標;a1、a2、a3、b1、b2、b3、c1、c2、c3為旋轉矩陣元素,由外方位元素(XS,YS,ZS,φ,ω,κ)角元素計算;f為焦距;xP、yP為糾正點像點坐標;xQ、yQ為移動窗口內各點像點坐標。
根據上述結果,判斷差值是否小于某一閾值(一般取一個像素),若小于則對該點進行標記,否則對該點進行數字微分糾正,即若Δx< ×δpixelsize且Δy< ×δpixelsize,則對地面點進行拉花標記;若Δx> ×δpixelsize 或Δy> ×δpixelsize,則對地面點進行數字微分糾正,δ為閾值范圍(一般取1 ~2 個像素),pixelsize 為像素大小。
2 方法步驟
1)獲取DEM 數據、原始影像數據和外方位等參數,計算正射糾正影像的地面格網范圍。首先利用已知數據和攝影測量共線方程的正算公式計算影像四角的地面坐標,并確定影像的地面范圍;再根據正射影像的比例尺計算其地面分辨率;最后根據影像的地面范圍和地面分辨率確定糾正影像的地面格網大小。
2)計算糾正地面點在成像時相對于投影中心的攝影光線方位。利用式(1)計算當前糾正點的成像方位角。
3)沿該點方位按照一定的窗口大小,基于Z-Buffer 原理計算是否存在同名像素,判斷是否“拉花”;對拉花點位或面元進行標記,對未拉花的點位或面元進行數字微分糾正。若糾正未結束返回步驟2),否則進行下一步。
4)對于糾正影像中的拉花區(qū)域,優(yōu)先采用其相對于投影中心對角線上的相鄰影像進行數字微分糾正,再依次考慮其他相鄰影像。
5)對剩余的拉花區(qū)域以相應的均高進行平面糾正。對于相鄰影像無法處理的拉花死角區(qū)域,采用該區(qū)域的局部平均高程重新進行數字微分糾正。
6)對糾正影像進行高斯平滑處理。利用當前主影像灰度進行糾正的區(qū)域和利用相鄰影像灰度進行糾正的區(qū)域,必定存在色差或“硬邊界”問題,對于這些區(qū)域再進行色彩調整和平滑處理。方法流程如圖3 所示。
3 實驗分析
本文選取拉花現象較明顯的一塊山地影像對上述方法進行驗證。
實驗一:選取一幅城區(qū)的DMC 影像,相機焦距為120 mm,航高約為2 800 m,最小高程為1 603.018 m,最大高程為2 025.668 m,像素為0.012 mm,影像大小為7 680×13 824。因此,可推算該地區(qū)航片的近似地面分辨率約為0.11 m,正射影像按照0.2 m 分辨率進行糾正。采用本文方法進行拉花糾正的過程如圖4 所示,可以看出,本文方法取得了非常好的糾正效果,解決了拉花區(qū)域的變形問題。
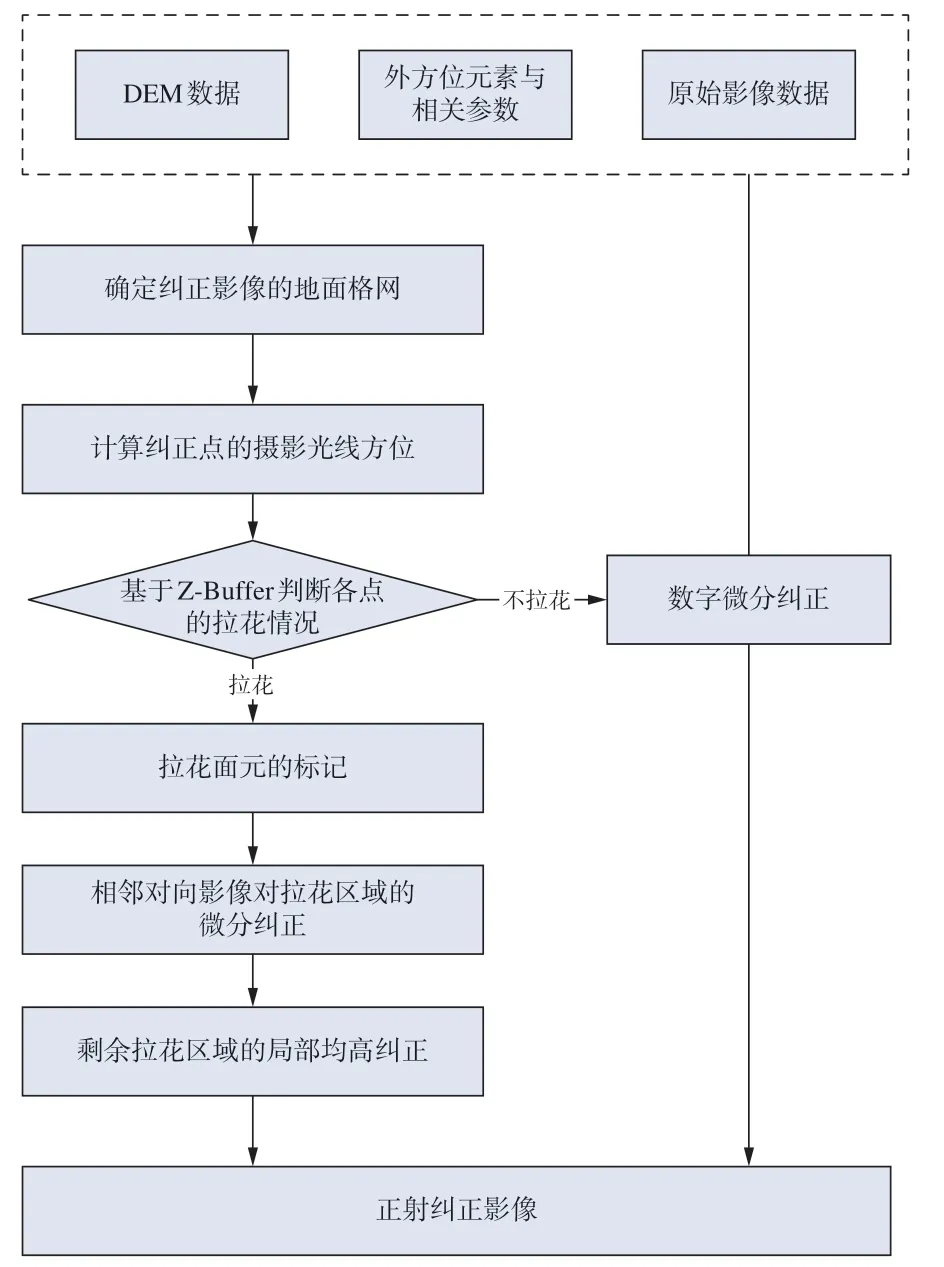
圖3 方法流程圖
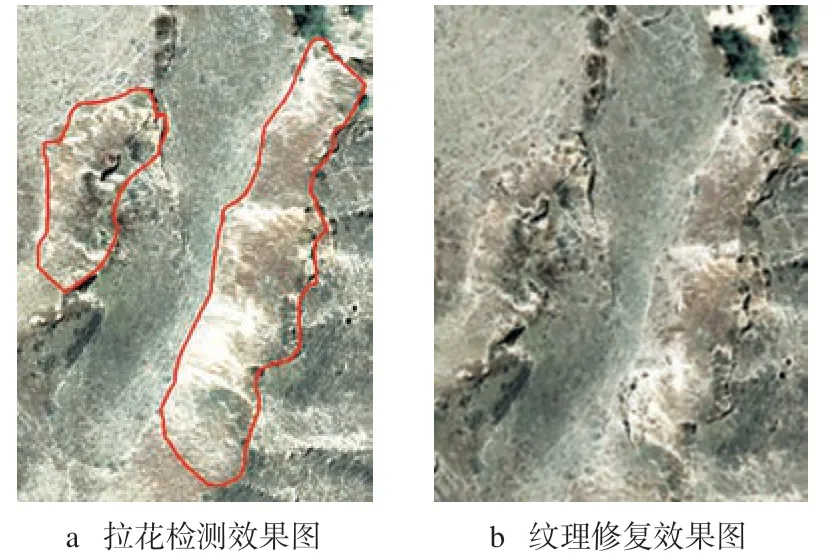
圖4 實驗一拉花糾正過程
實驗二:選取一幅UCE 影像,相機焦距為79.8 mm,航高約為3 400 m,平均高程為1 250 m,像素為0.005 2 mm,影像大小為13 080×20 010。采用本文方法對該區(qū)域進行拉花糾正(圖5),可以看出,本文方法對微小拉花區(qū)域也具有較高的檢測精度和修復精度,可靠性高、應用效果明顯。
為了驗證本文方法的精度和效率,在兩個實驗區(qū)各選取一幅圖的數據,分別采用人工選擇拉花區(qū)域并進行人工修復的方法和本文方法進行對比分析。將人工處理的結果假定為正確結果,兩種方法的統計結果如表1 所示,其中有效修復區(qū)域為算法修復完成后達到目標的正確修復區(qū)域面積與實際正確修復區(qū)域面積的比例,誤修復區(qū)域為算法識別錯誤的修復區(qū)域與正確修復區(qū)域的比例。兩種方法的效率比較如表2 所示,可以看出,本文方法具有很高的時間效率,處理結果精度可靠,可解決98%以上的拉花區(qū)域問題,大大減少或杜絕了人工處理的問題,應用價值很高。

a 拉花檢測效果圖b 紋理修復效果圖

表2 兩種方法的時間效率比較
4 結 語
本文提出了基于Z-Buffer 的正射影像區(qū)域拉花檢測方法以及相鄰影像的紋理修復策略,以解決正射影像中的拉花現象。實驗結果表明,本文方法可準確、高效地生產正射影像。本文主要研究了正射影像生產中的拉花現象檢測和修復問題,未提及相鄰影像之間的色差問題,嚴重時將導致拉花修復后的紋理區(qū)域與未修復的紋理區(qū)域之間色彩變化明顯,因此相鄰影像的色彩調整問題將是本文后續(xù)將要繼續(xù)研究的課題。
猜你喜歡
今日農業(yè)(2021年9期)2021-11-26 07:41:24
發(fā)明與創(chuàng)新·小學生(2021年3期)2021-03-25 11:48:49
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
電測與儀表(2015年5期)2015-04-09 11:30:52
