面向海洋牧場的水下機器人強度校核
2021-01-26 01:36:48卓悅悅高潔許煒燦樸金寶
水產養殖 2021年1期
卓悅悅,高潔,許煒燦,樸金寶
(南通理工學院電氣與能源工程學院,江蘇 南通 226001)
近年來隨著水下機器人在海洋牧場中的廣泛應用,常規水下機器人的潛航深度已經不能滿足航行任務的需要。發展大深度的水下機器人逐漸被各國重視起來[1]。但隨著水下機器人潛航深度的增加,耐壓殼體的承壓能力問題也就越來越突出。迎流耐壓殼體是水下航行器的重要承壓部分,必須對其強度進行計算。近年來,國內外許多優秀學者對水下機器人耐壓殼體進行了大量的強度計算與優化,為我們校核水下機器人的強度提供了經驗。如何雪浤[2]等應用有限元和理論分析相結合的方法,對水下機器人進行了結構優化及全面的結構分析。陳永華等[3]將AUV 模型前部設計成具有正高斯曲率的橢球面,相對于平端面提升了耐壓性能。基于前人經驗,該團隊設計的一款面向海洋牧場的水下機器人,其耐壓前罩殼體的受力相對要大一點,所以該項目選取水下機器人的耐壓前罩殼體進行強度分析。
該文采用有限元分析軟件ANSYS,通過建立合理的有限元模型、加載、分析強度,獲得迎流耐壓殼體的應力情況,為其結構設計提供重要的理論依據。
1 概念設計
1.1 外觀設計
目前,主流的ROV 主要造型有3 種:框架型、流線型、混合型。這3 種外觀造型各有千秋,能夠適應不同的水域環境。該項目研制的水下機器人結構采用流線型,這樣的設計既保證了縱橫向水流對水下機器人的影響最小,又能減少船體的重量,還可以提升整體的美觀。小型水下機器人在左右側各設計了一個水平推進器及在尾部設計一個垂直推進器作為它的主要推動設備。這樣的設計可以有效地減少水下機器人在水中前行時的阻力,提高它的航行速度。水平推進器和尾部垂直推進器中間夾著設備艙,設備艙是前罩為圓弧狀、殼體為圓柱體的密封空間,所有的電子設備都被安裝在設備艙中,內部還裝有一塊4 串1 并的鋰電池。在設備艙外部用自制的3D 打印機打印了外板固定設備艙和推進器[4]。圖1 所示為水下機器人三維設計整體效果圖。
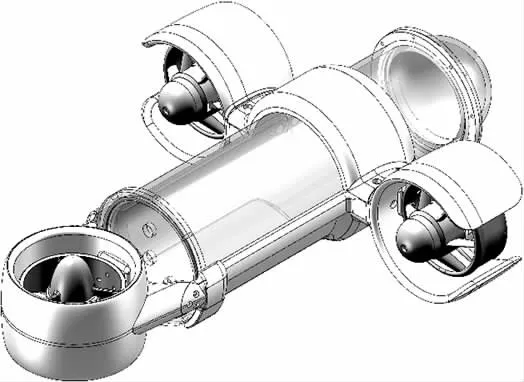
圖1 三維設計整體效果圖
1.2 工作方式
水域環境復雜、水流速度快、潛水人員體力有限等因素都易導致水下作業受阻,水深若是超過30 m 其安全風險將會更大。水下機器人可在工作人員在不用下水的情況下,完成許多水下作業,如水下捕撈、水下環境監測、水下視頻觀測和水下目標定位等。
水下機器人由兩部分組成。一是水下部分,包括四個推進器、一個高清攝像頭、聲吶系統、水下照明設備等;二是水上部分,信號控制終端通過臍帶纜與水下機器人互聯互通,為其提供控制信號,水下機器人所采集的視頻信號和傳感器信號也將通過臍帶纜傳輸回控制終端。
同時,海洋牧場的水下機器人設計有自主規劃路徑系統和監測識別系統等關鍵技術[5],保證了水下機器人在水中穩定地航行和檢測水下環境,其中自主設計的高清攝像頭可清晰地拍攝水下周圍環境。
2 迎流耐壓殼體有限元分析
2.1 建模
應用有限元軟件ANSYS 對水下機器人的耐壓殼體進行強度分析,首先我們建立了耐壓殼體前罩模型。據分析可知,前罩部分的受力最大,這部分滿足強度要求可代表水下機器人的耐壓殼體滿足強度要求。這樣既可以縮小計算規模,也不會對分析結果造成較大的影響。
我們采用三維輔助設計軟件如Solidworks 建立幾何模型,然后通過輸入接口導入有限元分析軟件ANSYS 中,采用ANSYS 軟件完成分析過程[6]。迎流耐壓前罩殼體的初始模型如圖2 所示,其殼體為半圓形薄壁結構,殼體壁厚為5 mm,端蓋厚度為5 mm。耐壓殼體選用有機玻璃加工制造,密度為1.19 kg/cm3,楊氏模量3E+09pa,泊松比為0.33,沖擊強度≥16 kg/cm3,拉伸強度≥61 kg/m3。將迎流耐壓殼體的端蓋模型導入ANSYS 平臺后,進行網格劃分,起初我們嘗試采用自由網格劃分,由ANSYS 軟件自主生成,操作方便。但是自由劃分的網格在前罩殼體的螺紋孔處計算結果有較大的誤差,為了減少誤差,我們采用Solid186 單元劃分六面體網格,其單元總數為24 715,節點數為 1 105 502。
2.2 邊界條件設置
邊界條件的確定是根據球體幾何結構來添加載荷與支撐邊界條件。在球頭施加載荷壓力,根據迎流耐壓殼體的實際工作水深,同時考慮適當的安全系數,在耐壓殼體外表面施加3 MPa 的壓力。固定支撐是在尾部法蘭端面加固定約束,迎流耐壓殼體端蓋有限元模型如圖3、圖4 所示。
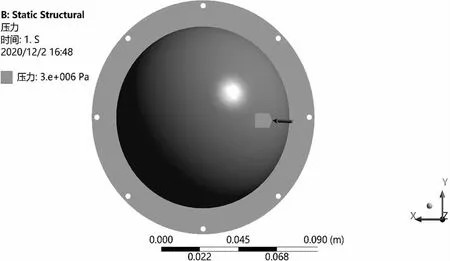
圖3 載荷壓力
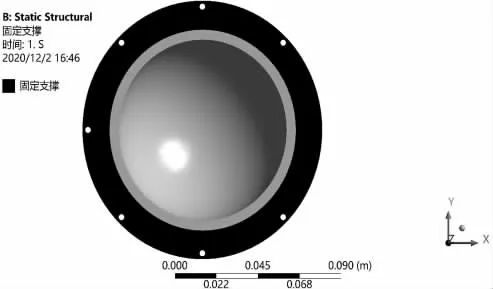
圖4 固定支座
2.3 迎流耐壓殼體的強度分析
使用ANSYS Workbench 進行仿真計算,在很大程度上減小了工程難度,由于其具有分析計算數據結果準確、計算過程便捷等優點,不僅可以極大提高工作效率,還使過程更簡捷化。
相對應地,ANSYS 有4 種應力工具:最大等效應力工具,最大剪切應力工具,摩爾庫倫應力工具,最大拉應力工具。前兩種主要評估韌性金屬材料強度,后兩中主要評估脆性材料強度。我們采用第四強度理論(又稱最大形狀改變比能理論),也就是我們常用的等效應力,由下式表示:

這一理論認為形狀改變比能是引起材料屈服破壞的主要因素,無論什么應力狀態,只要構件內一點處的形狀改變比能達到單向應力狀態下的極限值,材料就要發生屈服破壞。我們取前罩殼體上的一點切成微小正六面體進行單元應力分析,如果受應力最大點的主力方向的應力小于許用應力[σ],則不會發生破壞。
ANSYS 軟件的結構靜力分析是用來計算固定不變載荷或近似為等價靜力隨時間變化的載荷作用下結構的響應,即由于穩態外載引起的系統或部件的總變形,等效彈性應變,等效應力等。迎流耐壓殼體整體總變形如圖5 所示,等效彈性應變如圖6所示,等效應力如圖7 所示。通過圖7 所示,最大等效應力為0.4 Mpa,發生在前法蘭與殼體連接處,未超出材料許用應力,所以滿足要求。通過圖5 所示,變形可得最大變形0.27 mm,滿足設計要求。
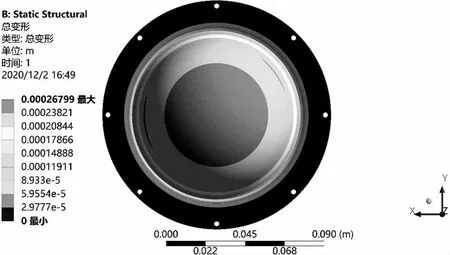
圖5 迎流耐壓殼體整體總變形
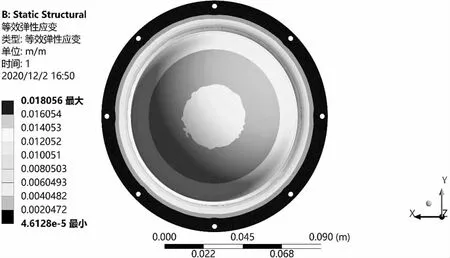
圖6 等效彈性應變
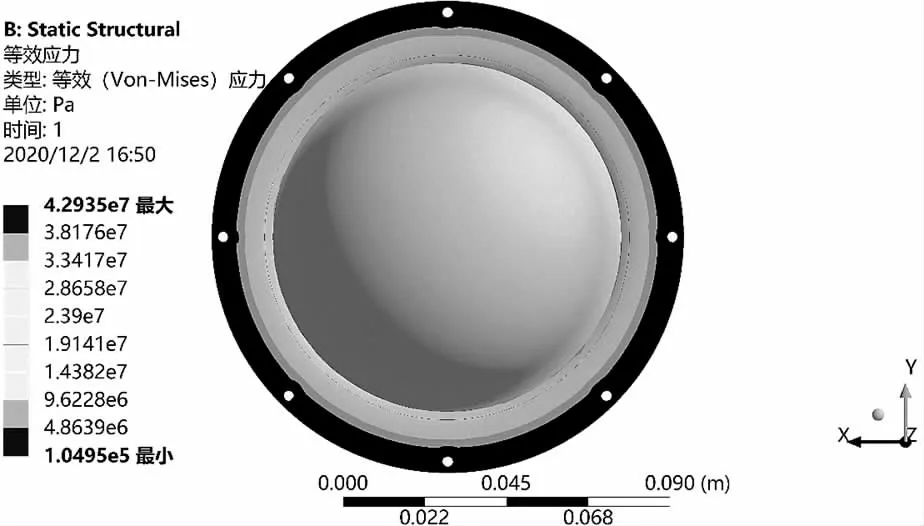
圖7 等效應力
3 結論
運用Solidworks 軟件建立了迎流耐壓殼體的三維模型,模型簡化后導入 ANSYS 軟件中進行了強度分析。通過有限元分析軟件Workbench 仿真,對水下機器人有機玻璃殼體進行有限元分析,得到理想的仿真結果,這對于水下機器人的設計與改進,提高其耐壓性能有著重要意義,是既經濟又有效的科學化方法。該文迎流耐壓殼體已在某水下航行器模型中實際應用,經外壓試驗和湖試驗證,其耐壓強度滿足設計要求,使用安全可靠。

猜你喜歡
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
山東工業技術(2016年15期)2016-12-01 05:31:22
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18
船海工程(2013年6期)2013-03-11 18:57:27