滅火飛機投放試驗地面附著密度測量方法研究
2021-01-19 12:56:38王晨昱
計量學報 2020年12期
彭 冉, 王晨昱
(中國飛行試驗研究院, 陜西 西安 710089)
1 引 言
阻燃劑投放的地面附著特性是表征飛機滅火效能的關鍵參量,是腹箱式滅火飛機投放任務系統性能評估的主要指標,了解特定飛機投放圖案的特性也是指導阻燃劑使用的一個重要原則。每年平均有1 500萬gal(約5.678×107L)的阻燃劑用于滅火,這種阻燃劑通常是由飛機以適當的速度和高度運輸并投放在空氣中。森林航空消防的主要目的就是確認旋翼飛機和固定翼飛機的滅火阻燃劑投放系統的投放圖案。20世紀50年代,美國林業局提出了一種名為“跌落測試”的方法[1]來量化飛機投放液滴的地面形態,用于反饋評估飛行高度和速度、阻燃劑流量和性能、氣象條件等對投放系統的影響能力及相關性大小。1959年,戴維斯在加利福尼亞進行了第一次跌落試驗,通過杯測網格布置完成了空間數據統計,分析了阻燃劑粘性和用量對液滴行為的影響[2]。同年,斯托里等采用杯格法研究了一架TBM飛機在松木中投放的阻燃劑分布和滲透規律。Hodgson B S在1968年[3]對各種飛機進行了杯格測試,并通過線性插值對地面網格分布的覆蓋水平實現了細化處理。1989年,Bilonick R A[4]等通過這種空間統計的方法改進了飛機滅火投放系統的計算模型。實踐證明,杯格測量是一種采集飛機投放試驗數據的有效方法,可以用來對消防飛機投放系統的滅火性能進行輔助驗證。杯格測試法(杯格法)是現有的跌落試驗測量方法(塑料網格鋪陳法[5]、地面液體滲透傳感器測量法[6]和杯格測試法)中最經濟便捷的一種,目前在各個航空消防大國中得到了廣泛應用,而我國在相關領域的研究仍處于起步階段。2017年12月,我國完成了首架自主研發的大型水陸兩棲滅火救援飛機[7]的首飛,滅火任務系統作為該型飛機一個關鍵的子系統,完成支撐其性能鑒定的理論計算對型號的適航審定具有重要參考意義。本文結合國外文獻中的相關成果,對滅火飛機跌落試驗的杯格法進行了詳細介紹,并在此基礎上,結合大型水陸兩棲飛機的自身特性,建立了使用杯格法進行數據采集的試驗程序,通過線性插值法對網格布點的策略進行了求解論證,并提出了該種測量方法精度評估的具體計算方式,形成了液滴地面沉降特性效能評估的有效測量方法。
2 杯格法工作原理及試驗要求
杯格法是一種將容器按適當間距固定在地面方陣點上,用來測量空氣中釋放阻燃化學品產生的地面沉積模式的標準程序。滅火飛機以一定的速度和高度飛過測點矩陣的上方,將攜帶的阻燃劑投放在有規則間隔的網格杯子中,記錄每個杯子中阻燃劑的質量和在柵格中的位置,并通過計算機軟件繪制液滴沉積區域的邊界圖和等值線云圖,進而確定阻燃劑在預計投放區域的覆蓋水平和投水落到地面的區域輪廓,如圖1所示。由于試驗場地資源和費用成本的限制,杯格法獲得的有效數據通常都是稀疏的,因此研究學者們多采用線性插值的方法對點進行估計,擴充測試數據的數據庫,以便獲取更加精確的投水試驗評估結果。

圖1 飛機投放試驗的杯格測量過程Fig.1 Cup grid measurement process of aircraft launch test
2.1 試驗條件
投放試驗是最精確地測量阻燃劑地面附著效果的方法。試驗是在可控的條件下進行的,如平坦的地形,較低且穩定的風速,嚴密監控的飛行速度、高度和姿態。投放試驗的數據主要用來確認阻燃劑投放系統的性能,也是IAB制定性能需求的重要依據,該數據也可研究投放圖案和投放參數的關系,同時用來對比不同阻燃劑投放系統的性能差異。
為了在有效的時間里獲取并記錄一些關鍵的信息,需要排除部分非關鍵變量的影響,如投水速度、投水高度、艙門狀態以及地形等。所有投水任務都需要按照飛行速度和高度以及飛機水箱投水艙門的配合狀態來進行,見表1所示。地形因素是限制試驗進行的主要條件,由于峭壁和破碎的地形會降低飛機的效率,同等投水量下地勢高的位置比低的地方著水區域大(詳細比對結果可參見表3),因此所有投水地點均選擇相對平坦的地區,以便于減少投水高度的影響。
表1 投放試驗飛機狀態參數表Tab.1 Drop test aircraft status parameter table
投放試驗的主要目的是量化投水的地面分布形狀,因此試驗矩陣的安放原則一定程度上決定著數據采集的效率和有效性。試驗矩陣的范圍應該包括該投水系統所有可用投水任務模式的覆蓋區域。試驗測試矩陣的布局需要全面理解投水任務系統的設計和操作、使用者的需求和目標、時間和成本限制。試驗矩陣會給出地面網格測點的布置范圍、試驗持續的天數、需要的阻燃劑數量以及試驗人數,具體搭建過程如圖2所示。

圖2 試驗矩陣實際搭建過程示意圖Fig.2 Schematic diagram of actual construction process of test matrix
由于投水試驗涉及到氣象投水模式、飛機狀態和試驗場地等多方面因素,所以試驗矩陣會依據測試試驗任務的變化而變化。為了減少工程試驗中試驗場景反復變更帶來的不確定性,文中全面考慮了飛機不同使用操作模式下的落水圖案響應,制定出了符合型號執行投水試驗的通用性試驗矩陣。
2.2 試驗裝置
現場試驗時除了對環境條件中的地形有要求外,氣象數據也是影響測量結果的重要因素,若條件允許,通常會在現場布置一個標準的風速計和風向標,并與附近的氣象站進行聯合評估,記錄平均風速、陣風風速、風向、溫度和相對濕度等變量。
投水試驗屬于大規模的外場飛行測量試驗,需要至少在試驗開始3個月前確認飛機執行投水任務的狀態,進而準備杯測試驗的相應設備。表2中列出了投水試驗杯測的通用設備,該列表主要幫助試驗人員減少需要考慮的項目,持續跟蹤相關設備的情況,并可以依據試驗系統的情況對列表進行更新。例如,地面上的測點杯柱需要依據測點的范圍進行變化;應該建立儲存區域去儲存一些還未運輸到試驗地點的設備;大量的長期設備應該打包并進行標簽運輸。綜上,須確認具有充足的協調時間以準備量杯、量杯固定架以及量杯固定桿。新的量杯和杯蓋應該在空的情況下進行稱重以獲得空杯和杯蓋的平均質量。
表2 杯格法通用試驗設備列表Tab.2 List of universal test equipment for cup method
水體破裂于地面分散后,從投水區域中心向外邊界擴散覆蓋密度逐漸減少(見圖3所示),定義投水區域的邊界很困難,因此,用杯格法測試投水區域時,其外邊界的確定可以根據等值線的密度大小使用特定的覆蓋等級來定義。對于其它的投水區域,可以使用投水后地面評估方法和航掃儀進行估計。航掃儀可以檢測到投水區域和周圍環境之間的溫度差異,提供投水區域的地形校正圖像。
圖3 飛機投放12 t水落水密度分布云圖Fig.3 The distribution of falling water in 12 tons of water dropped by aircraft
由于地面條件限制了視頻的拍攝視角,所以進行測量試驗時,通常會添加航拍鏡頭進行輔助拍攝。飛機多點位置拍攝技術的使用可以獲得投水過程的寬視景效果,能夠提供全畫幅的液滴下落沉降過程,極大地提高了研究投水特性的有效性。沿著飛行方向的軸線可捕捉到水體迎著側風擴散和漂移的特性;若垂直于飛行軸線,便可捕捉到投水高度、投水的相對速度以及投水水體的破裂過程,進而獲得完善落水地面分布圖案的更多信息。
3 落水密度測量試驗程序
3.1 測點布局
建立杯測試驗矩陣前,需要對測點的布局進行分析,達到減少試驗成本和工序的目的。本文根據大型水陸兩棲飛機的投水任務系統投水特性的仿真計算[8],獲得了理論上的液滴地面沉降結果(見圖3),并以此為依據,給出了進行杯測測點矩陣布置的參考建議。
測點分布的范圍取決于著水區域的覆蓋面積,不同的投水狀態對應的分布區域也存在差異性,表3中量化統計了不同飛行速度、投水高度和投水量多種組合投水構型下的落水分布范圍,用以分析和確定投放區域的設定面積。連續投水模式下平均著水區域長度大于單投模式,寬度略小于單投模式,且同一飛行速度下,落水軸向長度隨著高度的增大而減小,縱向寬度隨著高度的增大而增大;同等飛行高度,落水區域的軸向和縱向距離都隨著速度的增大逐漸減小。由此分析可知,若飛機的4個水箱同時打開,12 t水齊投,其對應的著水區域長度不大于110 m,寬度不大于85 m;若是4個水箱分為兩組分次打開,著水區域的長度不大于250 m,寬度不大于60 m。由于測點網格矩陣涉及的地面工作量大,并且一旦布置完就很難更改,所以要求試驗矩陣擺放的范圍需能夠覆蓋不同投水構型的落水區域,因此選取這2種計算結果的長寬最大值來量化測點矩陣的大小。
不同投水構型的著水區域中心位置不同,為了覆蓋不同構型的著水區域中心,選擇在測點網格矩陣長度方向的中心1/3區域進行加密,以滿足不同構型投水時著水密度對于測點的精度要求。通過線性插值分析,文中確定了該種型號飛機測點布局的網格最小間距為4 m,并在落水密度梯度較大的區域進行間距縮小,與落水分布云圖的狀態相適應。經過對過去數百次投水試驗的比較分析可知,正交于飛行方向的橫向著水覆蓋量的變化速率要大于飛行路線方向上的著水覆蓋量的變化速率[9],特別是在投水速度較大的情況下,因此文中只對沿著正交于飛行方向的測點進行了加密處理,如圖4所示。若是有條件限制或成本滿足要求,也可以縮小網格最大間距,采用同等間距的常規網格處理,詳細布局參見表4所示。

表3 不同投水構型下的落水區域分布范圍Tab.3 The regional distribution range of falling water under different influent configurations
圖4 杯格法加密網格的基本平面圖Fig.4 Basic plan of encrypted grid by cup lattice method
基于分析,規劃了杯格法網格的加密和不加密2種情況的基本平面圖,并給出了杯測加密測點網格矩陣的布置方案的俯視圖,如圖5所示。

圖5 杯格法加密網格布點俯視圖Fig.5 The top view of the point layout of the encrypted net by the cup lattice method
3.2 測點數據采集
投放試驗前,在平整的土地上按照測點矩陣方案布置金屬樁并且固定牢靠,每一個木樁的頂部都系著一個塑料或紙質的杯子,并通過橡皮筋將其配套的杯蓋固定在木樁周圍。待投水試驗結束后,所有粘有投水痕跡的杯子都必須盡快地蓋上杯蓋以減小蒸發,并根據每個陣列末尾提前放好的標記版數字,在蓋子上面快速標記行號和列號,以標識量杯在測點陣列當中的位置(見圖6)。這些杯子隨后會被收集到稱重的區域,記錄每個杯子里的阻燃劑質量和位置信息,用于完成投水圖案的特性報告。

圖6 杯測試驗測量工具和布置效果圖Fig.6 Cup test measuring tool and layout effect diagram
飛行試驗人員會均勻地分布在工人當中,使用手持式對講機,全程監控整個投水區域中工作的每一步,試驗過程中完成任務的工人就可以隨時幫助正在進行工作的人員。
沿測點區域每隔10~50 m會布置一些新的量杯和蓋子,這樣工作人員就能快速地進行反應處置,以保證被投水損壞的杯子可以及時得到更換并保持干燥。同時,沿著測點的布局區域放置箱子以收集量杯。當把所有量杯收集好以后,觀察員需要逐步檢查測點區域以確認所有附著有投水的量杯都蓋好杯蓋,打好標簽,送往稱重區域。
投水試驗期間,攝影師用3臺攝影機對投放的過程進行實時監測,獲取測點陣列的尺寸信息。空中的1號航拍儀(攝影機)用于監測地面信息,應縮放畫面以盡可能多地囊括整個飛機的圖像[10],如滅火云的信息和水的下落特性等。若想得到最佳圖像,2號攝影機應放置在陣列的上三角直角處縮放調整鏡頭,一旦水下落,攝影師跟拍滅火云從形成到消失的整個過程。3號攝影機處于試驗矩陣的下三角直角位置,與2號攝影機對角線正對,以便更清楚地得到全范圍的測點陣列信息和飛機飛行的方式。
3.3 稱重及計算
常溫條件下,即使當天投水試驗的所有稱重杯子都有密封蓋,一些材料也會隨著時間慢慢蒸發掉。另外,若標記和分類整理出現錯誤,也會導致投水實驗當天的數據作廢。因此,若情況允許,當天實驗的杯子盡量保證即時稱重,以減小誤差。
稱重程序的設計應盡可能地滿足需要,但過程指令無法包含所有可能出現的程序錯誤,最佳的解決方式是3人同時進行,單人稱重,單人記錄,單人監看。在進行稱重的過程中,每個量杯的質量和位置信息被錄入計算機。空杯及蓋子的質量會被從總質量中減去,得到阻燃劑質量x/g。為了與仿真計算結果進行對比,將質量單位換算為L/m2,對于密度為1.0 g/cm3的阻燃劑(水)的投水密度:
ρt=(x÷0.001 g/L)÷0.005 026 m2/杯
(1)
圖7為文獻[11]利用杯格法進行投水試驗后的采樣計算結果,沒有進行采集的量杯位置處為0.0,挑選出精確的數據描繪了滅火區域的云圖,將其與圖4中的測點布陣方案比對發現,試驗矩陣的布點規律和落水區域的分布情況基本吻合,能夠滿足投水試驗落水數據測量的實際需要。
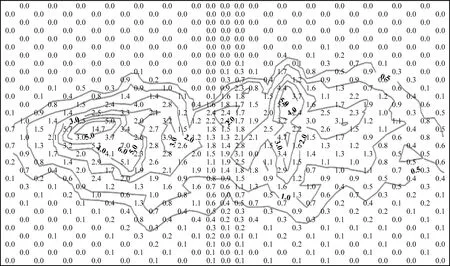
圖7 杯測試驗數據計算機繪制云圖, 投水高度46 m,投水率950 L/sFig.7 Cup test data drawing cloud map by compute
4 落水精度評估
飛機在執行投水任務時,飛行速度、溫度、風速和觀察員的判斷等因素都在一定程度上影響投水的位置和效能,落水的位置和落水區域存在偏離期望值的情況,致使測點矩陣無法發揮出預期的功效。針對上述情況,文中對這種由于落水偏離引起的有效投水量(即恰好掉落在火災發生區域的落水量)進行了分類計算,進而確定了杯測法在不同情況下的相對有效性。
假設測點矩陣所在的位置為目標區域,則整個投水過程可能會遇到3種情況:1) 若地面沉降的水體完全覆蓋投水目標區域,將其定義為全覆蓋;2) 若地面沉降的水體只有部分落在目標區域內,稱其為部分覆蓋;3) 若地面沉降的水體全未落在目標區域內,則視其為偏離覆蓋,具體情況如圖8所示。
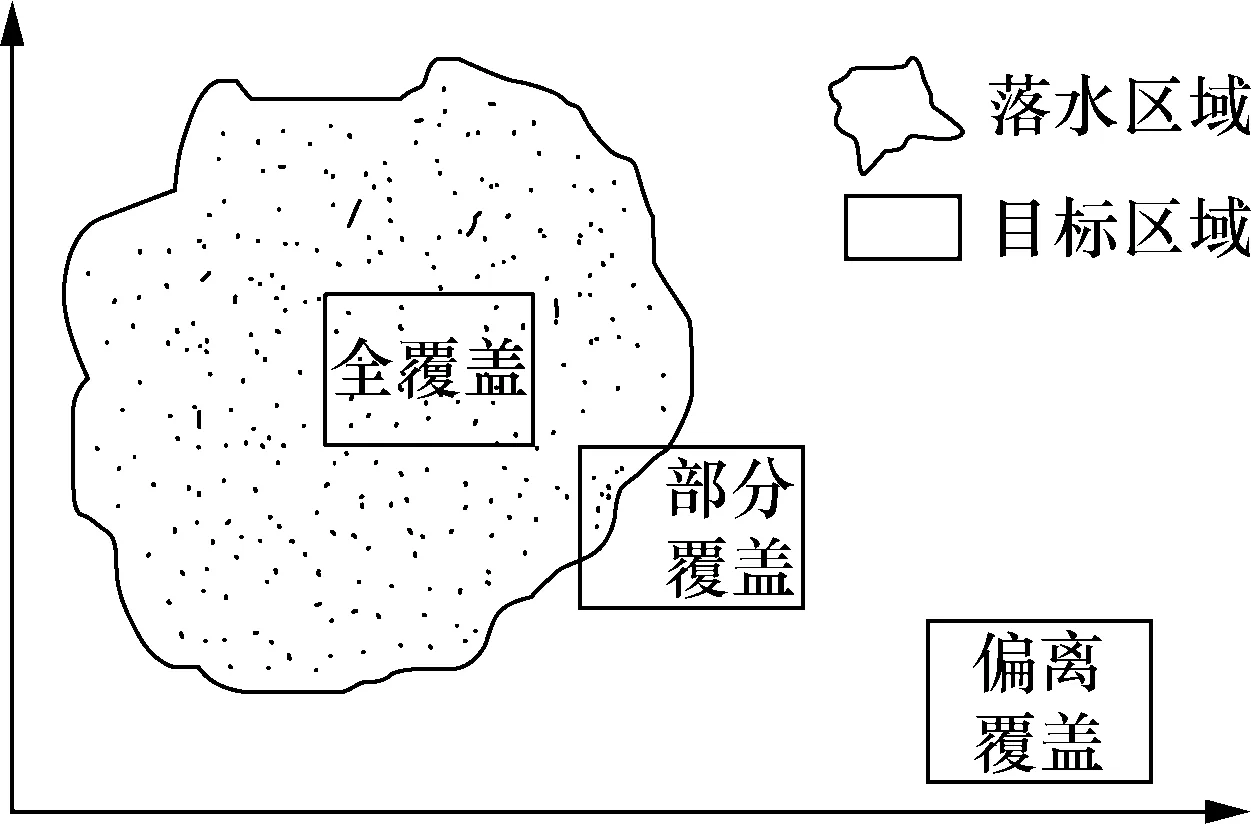
圖8 落水位置地面測量效果圖Fig.8 Effect diagram of ground measurement of falling water position
每種覆蓋方式所對應的有效投水計算量會有一些差別,以杯格法的布置方案為樣本,假設目標區域是n×m的方陣,飛機水箱載水總質量(投水質量)為Ms,則進入目標區域的通用落水質量為:
M=∑∑ρzijdxdy
(2)
式中:M為目標區域的實際落水量;ρ為水的密度;z為每個測點的落水高度。求和的上下限由目標區域圈定的測點個數確定,若目標區域全覆蓋,則總落水質量為:
(3)
則整個投水過程中實際落入投水區域的有效投水比r為:
r=M/Ms
(4)
有效投水量落入目標區域的相對百分比為:
p=M/M1
(5)
由式(4)和式(5)知,由于投水過程中的蒸發、汽化等物理過程的影響,r始終小于1。若為全覆蓋狀態,p=1;若處于部分覆蓋狀態,式(3)中的M1仍假定為全覆蓋狀態下的計算結果,p<1;若投水結果為偏離覆蓋,有效投水量為0,r=0,p將無物理意義。3種狀態下的有效投水比的關系為:
ra>rp>ro=0
式中ra,rp,ro分別為全覆蓋、部分覆蓋和偏離覆蓋投水比。
5 結 語
針對大型水陸兩棲飛機投水任務系統性能鑒定的要求,設計了投水試驗的地面附著密度測量方法,基于對飛機投水仿真地面層落水數據的計算和分析,可知落水測量試驗矩陣的最小間距不小于4 m,即落水區域的中心位置可采用最小間距,其它位置可結合仿真落水的實驗結果和工程試驗的造價成本適當擴寬。文中給出了該型飛機地面杯測的具體布陣方案,并對杯格法進行試驗數據采集的有效性和精度進行了評估。同時,與國外杯測獲得的投水結果進行了對比,確定了文中測量方法的合理性與可行性。
[參考文獻]
[1] Satoh K, Maeda I, Kuwahara K,etal. A Numerical Study of Water Dump In Aerial Fire Fighting [J].FireSafetyScience, 2005, 8(8): 777-787.
[2] Legendre D, Becker R, Elise Alméras,etal. Air tanker drop patterns [J].InternationalJournalofWildlandFire, 2014, 23(2): 272.
[3] Hodgson B S. Procedure to evaluate ground distribution patterns for water dropping aircraft [R]. Ottawa:Forest Fire Research Institute, 1968.
[4] Bilonick R A. An Introduction to Applied Geostatistics [J].Technometrics, 1989, 33(33): 483-485.
[5] Satoh K, Kuwahara K, Yang K T. A Numerical Study of Forest Fire Progression and Fire Suppression by Aerial Fire Fighting [C]// ASME International Mechanical Engineering Congress & Exposition. 2004.
[6] Satoh K, Maeda I, Kuwahara K,etal. A Numerical Study Of Water Dump In Aerial Fire Fighting [J].FireSafetyScience, 2005, 8(8): 777-787.
[7] 孫偉, 李楠. “蛟龍”出水—中航工業將研制大型滅火/水上救援水陸兩棲飛機[J]. 國際航空, 2009, (9): 42-43.
Sun W, Li N. Jiaolong effluent-Air China Industry will develop large-scale fire-fighting/water rescue am phibious aircraft [J].InternationalAirways, 2009, (9): 42-43.
[8] Zhao X, Zhou P, Yan X,etal. Numerical simulation of the aerial drop of water for fixed-wing airtankers[C]//31st Congress of the International Council of the Aeronautical Sciences, 2018, 9-14.
[9] Amorim J H. Numerical modelling of the aerial drop of firefighting agents by fixed-wing aircraft. Part I: model development [J].InternationalJournalofWildlandFire, 2011, 20(20): 384-393.
[10] 王艷, 謝廣蘇, 沈曉宇. 一種基于MSER和SWT的新型車牌檢測識別方法研究[J]. 計量學報, 2019, 40(1): 82-90.
Wang Y, Xie G S, Shen X Y. A New Vehicle Licence Plate Recognition Method Based on MSER and SWT[J].ActaMetrologicaSinica, 2019, 40(1): 82-90.
[11] Plucinski M P, Pastor E. Criteria and methodology for evaluating aerial wildfire suppression[J].InternationalJournalofWildlandFire, 2013, 22(8): 1144.
猜你喜歡
小哥白尼(軍事科學)(2022年3期)2022-06-09 03:11:24
環球時報(2022-05-30)2022-05-30 15:16:57
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
民用飛機設計與研究(2020年4期)2020-11-27 17:34:02
當代陜西(2019年11期)2019-06-24 03:40:28
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
