一種基于FCM的道路提取算法
2021-01-18 04:37:36肖馳田小霞
現代計算機 2020年33期
肖馳,田小霞
(韓山師范學院計算機與信息工程學院,潮州 521041)
0 引言
遙感圖像語義分割是將圖像中表示特定類別地物的像素進行劃分并標注[1]。道路是地圖制圖和地理信息系統主要的記錄和標識對象,在智能交通、城市規劃和地圖更新中扮演重要角色。遙感影像的道路提取算法是根據遙感影像中不同物體的光譜特征、像素特征、邊緣特征、空間幾何特征等信息,選擇符合道路特征的部分[2]。圖像采集的角度和高度、圖像的尺度、光照條件、樹木或者其他遮擋物等因素導致遙感圖像的復雜性和多變性,因此,從遙感圖像中提取道路信息最主要的問題是遙感影像的復雜性[3]。
圖像中同一類型地物像素的值總是在一定范圍內的。根據遙感圖像灰度特征的連續性,可設定合適的閾值來分割圖像的特定地物,但是尋找合適的閾值是一個難題。Mu等人[4]在圖像的灰度特征基礎上,采用大律算法(Ostu)將圖像像素劃分為道路和非道路。該方法通過圖像的直方圖來計算最佳閾值,但非道路的特征會干擾閾值計算,且計算量大。Shanmugam等人[5]采用動態閾值來提取道路,但通用性差,算法復雜度高和計算量大。左娟和李勇軍[6]人根據遙感影像的紋理特征和光譜特征,提出一種基于K均值聚類的遙感圖像分割方法,該方法能提取道路主體框架,但對道路中被樹木等遮擋物的部分處理效果不理想。Shi等人[7]提出了一種自適應的光譜特征空間分類,該方法未能對道路末節、環形路口、被遮擋的道路很好處理。
模糊C均值(FCM)作為一種模糊聚類算法,具有同時處理圖像分割和噪聲去除兩個問題的潛力,是當前研究的熱點之一。王榮淼等人[8]將FCM算法用于醫學圖像分割,Wu等人[9]則將該算法應用于彩色圖像的前景分割。但是由于FCM聚類算法在圖像分割時關注點是像素,對噪聲比較敏感。康家銀和張文娟[10]提出核FCM來提高算法的抗噪能力。洪紹軒等[11]將FCM與支撐向量機結合來提高算法的有效性和可靠性,
為了更好提取道路信息,本文提出一種基于FCM算法來提取高分辨率遙感圖像道路。首先,使用FCM對圖像分割,得到道路信息。其次,提取入戶道路信息,通過異或操作去除道路信息中的入戶道路。然后,采用區域互通實現道路連續,包括分叉道路的連續性。最后使用生態學方法對分割圖像進行后期處理,輸出道路圖。該道路信息為后續的智能交通研究打下堅定的基礎。
1 FCM算法及相關研究
FCM是一種基于目標函數的模糊聚類算法,它屬于無監督學習,主要用于數據的聚類分析。模糊C均值聚類是一種,它的核心思想就是通過不斷地更新聚類中心與隸屬度函數,直到最佳聚類中心。在圖像分割中,該算法是通過最佳聚類中心得到最優的分割。
圖像的像素數據集合為X={x1,x2,…,xn},其中xi代表圖像像素的灰度值,n是像素個數。圖像分割問題就是將n個樣本分成c類的聚類問題,聚類中心可以表示為V={v1,v2,…,vc}。FCM算法旨在對目標函數進行最小化,將圖像分割過程轉化為優化特征函數的過程,以實現樣本數據的模糊劃分。FCM算法的目標函數為:
式中的m為模糊因子,控制樣本在不同類別間的模糊程度。m值過大,聚類模糊性大,不利于圖像分割;m值過小,分割的結果接近于硬化分。U={uij,0<i<n,0<j<c}是隸屬度函數,uij表示像素點xi屬于第j類聚類中心的隸屬度值,且滿足:

采用拉格朗日乘子法對目標函數J進行處理,令:

上式取極值的必要條件是:
對公式求解,可得到目標函數J可能的極值點。因此,得到U和V的迭代公式為:

根據最大隸屬度原則,確定各像素所屬的類別,Cj表示第i個樣本點所屬的類別。

算法具體流程:
輸入:一張圖像
輸出:圖像中像素的聚類
(1)確定c,m,迭代次數T,收斂精度ε等初值;
(2)初始化聚類中心V,初始化隸屬度矩陣U;
(3)迭代次數t=t+1;
(4)根據式迭代更新V;
(5)根據式迭代更新U;
(6)計算Vt和Vt-1的差值。若差值小于ε小或者t>T,算法結束,同時輸出Vt-1和Ut-1,否則跳至(4)繼續循環;
(7)根據最大隸屬度原則,由式確定各像素所屬類別。
2 基于FCM的道路提取算法
遙感圖像中的道路信息易受光照、尺度、遮擋物等影響,在復雜場景中提取道路信息具有一定的挑戰性。本節提出基于FCM的道路提取算法主要包括三部分內容:利用FCM提取基本道路信息;去除道路信息中的入戶道路信息;區域互通算法實現道路的連續。
2.1 利用FCM提取基本道路信息
假設遙感圖像I,其灰度圖像為:

道路與非道路信息在圖像灰度空間存在顯著差異,本節采用FCM算法,設置最佳的m來分割灰度圖像的道路信息,得到道路信息聚類圖:

2.2 去除入戶道路信息
由于聚類中道路信息中包含有入戶道路信息,且入戶道路信息的灰度級比主干道路的灰度低,為了更好地將入戶道路從主干道路中分離,掩膜矩陣定義:
其中k是控制因子,主要控制入戶道路的灰度級。T是設定的閾值,通過給定閾值來分割出入戶道路信息。
將遙感信息聚類圖中的入戶道路去除,得主干道路信息,表達式如下:

其中⊕表示異或操作。
2.3 區域互通算法實現道路的連續
由于噪聲的存在,道路信息會有丟失,出現不連續狀況。本節提出一種區域互通算法,計算出每個區域與其他區域的最小距離,并將該區域標記,使得道路互通。設圖像中不同區域標記為Labeli(i=1,…,l),其中l為區域個數。區域i的最短距離:

其中j表示與區域i距離最短區域編號,將該區域i和區域j中距離最短的點標記,記錄這些點組成的區域(最左、最右、最上和最下),實現區域互通。
基于FCM的道路提取算法描述如下:
輸入:一張彩色遙感圖像I
輸出:道路信息圖road
(1)將圖像轉為灰度圖像;
(2)利用FCM對灰度圖像G進行聚類,得到L;
(3)根據公式和公式,得到非主干道的掩膜;
(4)根據公式,得到主干道路信息圖;
(5)采用區域互通算法,實現道路連續;
(6)生態學方法對主干道路進行優化處理,并輸出。
3 實驗結果與分析
本節針對CASNET中的圖像進行處理,圖1顯示待處理的圖像,該圖像中主干道路具有明顯特征,但是不同區域主干道路顏色特征不同,如紅色方框中主干道顏色偏暗,紅色橢圓中顯示了樹木和建筑物對道路遮擋,以及道路上行駛的車輛等造成道路信息的缺失。

圖1 道路圖
本研究的軟硬件環境為:DELL筆記本,處理器為Intel i7-9750H,內存為16GB,Win10操作系統,仿真軟件MATLAB 2018。
FCM中類的個數設置為2,圖2顯示不同模糊度m的聚類情況,模糊度越大,目標函數J越小。子圖(d)顯示模糊度為3時,盡管其J的值最小,但聚類效果為單一的黑色。故本節中模糊度m設置為2.5。
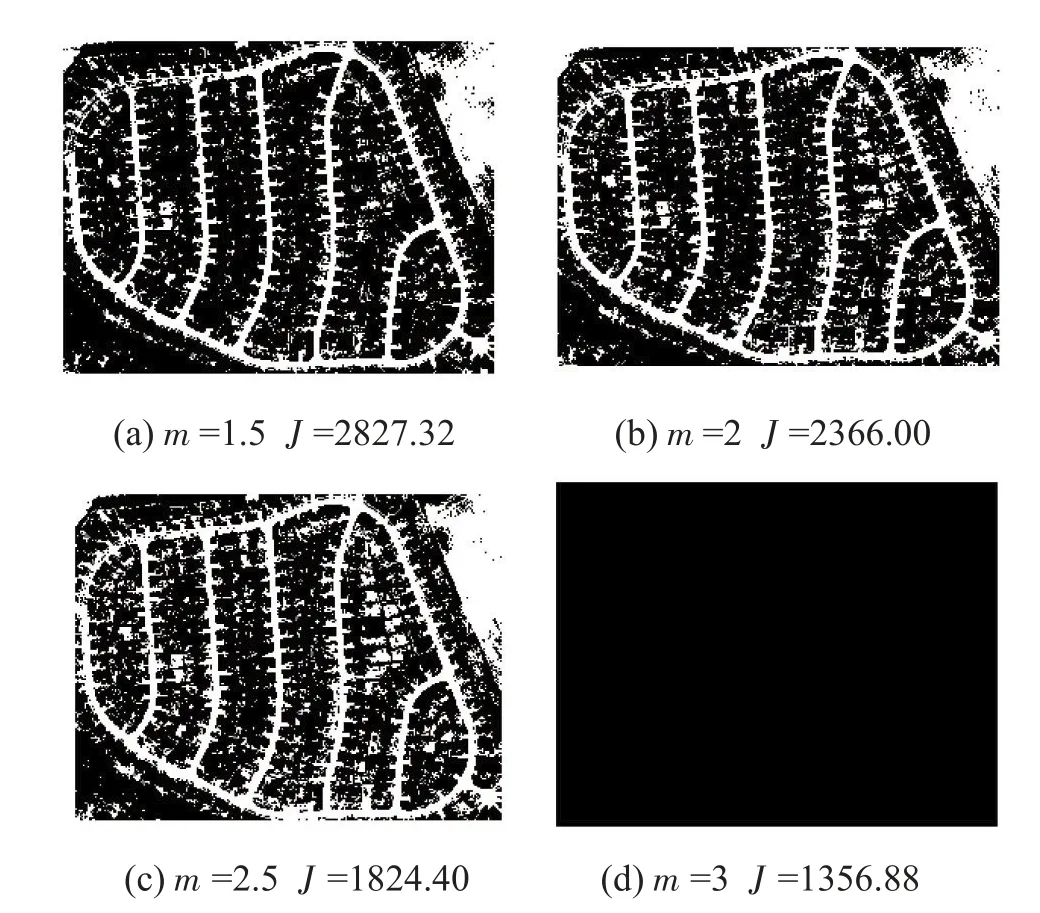
圖2 不同模糊度的聚類效果
為了更好地提取主干道路信息,將入戶道路從主干道路分割,圖3顯示了控制因子k和閾值T取不同值時入戶道路的信息圖。當控制因子k為3和T為0.1,子圖(a)顯示了過多的主干道路信息。同樣,子圖(d)也存在過多的主干道路信息。當控制因子k為7和T為0.1、k為5和T為0.15、k為5和T為0.2時,子圖(c)、(e)、(f)都存在入戶道路信息缺失,其中子圖(f)缺失入戶道路信息最多。故在本節選擇控制因子k=5和閾值T=0.1。
通過將入戶道路的信息圖與聚類圖進行異或操作,去除主干道路上的入戶道路信息,保留主體道路信息,如圖4所示。
圖5中的子圖(a)顯示去除圖4中非道路信息的道路聚類圖,但是道路出現了不連續。本節采用區域互通算法實現道路的連續,如子圖(b)。
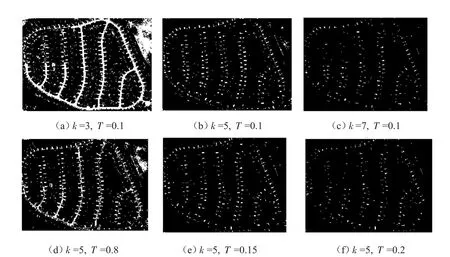
圖3 不同k和T的效果
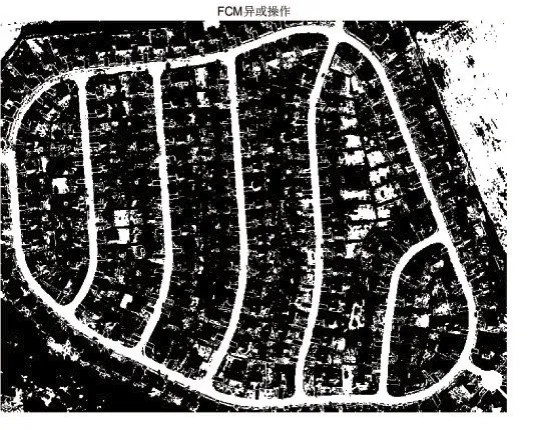
圖4 去除入戶道路的聚類圖
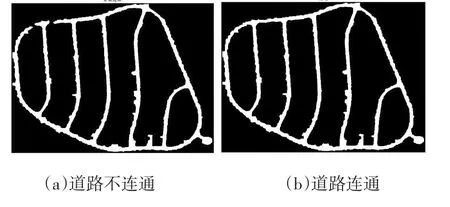
圖5 道路圖
從圖中可以觀察到,主干道路基本被提取,但仍有部分邊緣被誤提取,主要是因為該處的地物物質與道路相似。
4 結語
本文提出一種基于FCM的道路提取算法,該方法也是基于像素點的道路提取方法。首先利用FCM在圖像的灰度特征上劃分出道路與非道路信息;其次,道路信息中需要去除入戶道路信息,故提取入戶道路信息,通過異或操作將入戶道路信息去除;然后,標記道路不連續區域塊,采用區域互通算法實現道路連續;最后采用形態學方法優化并輸出道路圖。實驗仿真顯示算法的有效性。由于遙感道路場景的復雜性和多變性,本方法不適用所有場景下的道路提取,僅對遙感道路的提取提供一種方案。
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
中華手工(2017年2期)2017-06-06 23:00:31
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
中外會展(2014年4期)2014-11-27 07:46:46
民生周刊(2012年10期)2012-10-14 09:06:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32