基于空間相關性的混合RSS-AOA 定位*
2020-12-23 06:11:52郭道省
通信技術 2020年10期
張 俊,郭道省
(陸軍工程大學,通信工程學院,江蘇 南京 210007)
0 引言
近年來,隨著5G 技術的飛速發展和設備通信范圍的穩定增長,以及對基于位置的服務的需求,目標定位已廣泛用于軍事和民用領域,如環境監控,路由和頻譜共享,物聯網,人群感知,應急服務[1-5]。
為了保持較低的執行成本、計算復雜度和對所有地形的適用性,限制了現有全球導航衛星系統(global navigation satellite system,GNSS) 的 使用。從測量中估計位置信息的方法主要有到達時間(time of arrival,TOA)、到達時差(time difference of arrival,TDOA)、接收信號強度(received signal strength,RSS)和到達角(angle of arrival,AOA),文獻[6]中對以上方法都有相關介紹。盡管基于單一測量的目標定位估計具有低復雜度、低成本的優點,但估計精度仍有很大的提高空間。因此,為了提高定位系統的精度和可靠性,提出了基于多量測的混合定位系統[7-10]。
使用混合RSS 和AOA 數據定位目標位置是一個非凸優化問題。為了真正解決這個問題,文獻[7]中使用RSS 和AOA 信息從發射器地理位置推導了最小二乘估計和最大似然估計,由于未考慮傳感器的陰影衰落,會導致比較大估計誤差。文獻[8]中作者使用球坐標轉換和可用的AOA 觀測值建立了測量值與未知目標位置之間的新關系,并在未知發射功率下推導了簡單的閉式解。在文獻[9]中,當傳感器在未知的傳輸功率和路徑損耗系數下隨機部署時,作者提出了加權最小二乘法估計器來估計位置。在文獻[10]中,作者通過在非合作和合作定位問題下使用凸松弛技術,將這些混合估計量轉化為半定規劃(semi-definite programming,SDP)和二階錐規劃(second-order cone programming,SOCP)問題。上述研究并未充分考慮實際環境中節點之間陰影衰落的相關性。
在本文中,假設陰影衰落在傳感器之間具有空間相關性,從觀測模型開始,提出的路徑損耗模型考慮了許多因素。通過貝葉斯層次模型,將度量模型轉化為數據模型、過程模型和參數模型三階段模型。該模型能較好地說明空間相關的陰影衰落問題。然后,利用貝葉斯理論得到未知信道模型參數的后驗概率分布,并用馬爾可夫鏈蒙特卡洛(Markov chain Mento Carlor,MCMC)計算出后驗概率分布,并用于估計未知位置的位置。
1 RSS-AOA 定位問題描述
1.1 問題介紹
本文考慮了一個二維混合RSS-AOA 定位網絡結構,規則的節點部署分布如圖1 所示,其中包含一個目標節點、一個初始節點和N個錨節點(ANs)。未知的目標節點為s=[sx,sy]∈?2,已知的隨機初始節點i=[ix,iy]∈?2,錨節點為ai=[aix,aiy]∈?2,i=1,2,…,N,利用一個分層模型來整合距離和角度來估計目標位置,通過結合RSS 和AOA 測量來提高估計精度。
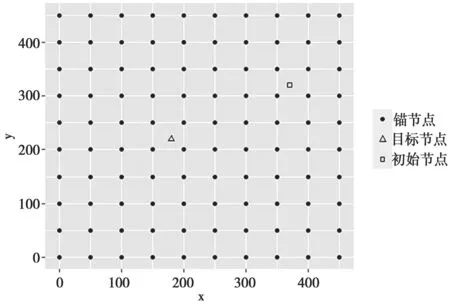
圖1 規則的節點分布圖
初始點l=[lx,ly]∈?2傳輸信號,其他的錨節點接受信號生成訓練集,用于在貝葉斯分層模型匯總計算空間相關性和估計參數。訓練集的結構表示如下:

其中P=[P1,P2,…,PN],?=[?1,?2,…,?N]分別表示RSSs 和AOAs 的測量值,Pi,?i表示第i個錨節點的RSS 和AOA 值。L=[a1,a2,…,aN]表示錨節點的位置坐標。通過設置不同的初始節點位置和發射功率來生成多組數據集,提高了貝葉斯分層模型中未知參數的準確度,提高了定位精度。
1.2 測量模型
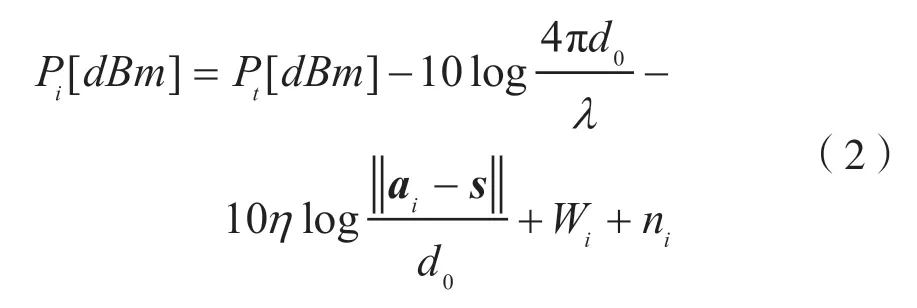
根據發射功率和信號傳播模型,可將錨節點處接收的信號分解為路徑損耗、陰影衰落、小尺度衰落和噪聲。通過長期觀測,可以求出小尺度衰減和噪聲的平均值。RSS 和AOA 測量模型如圖2 所示,由此可得到i的RSS 值:
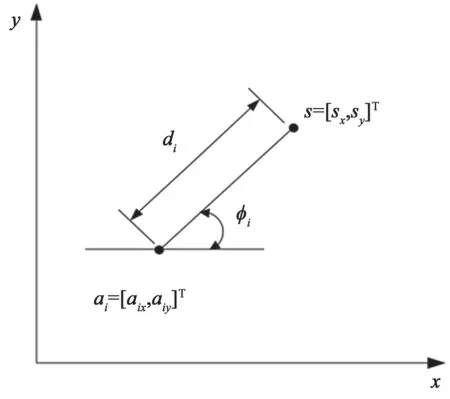
圖2 2D RSS-AOA 測量模型
其中Pt[dBm]是傳輸功率,d0是參考距離,在本文中假設d0=1[m]。λ是輻射的波長,η是路徑損失系數,||ai-s||表示目標節點和錨節點i間的歐式距離。Wi是一個服從高斯分布的陰影衰落,ni是由錨節點造成的測量誤差,是一個服從零均值標準差為σn的高斯隨機變量。
在實際的無線信號觀測環境中,存在著由相似地形或同一障礙物而導致的陰影衰落。由以往的研究中可以得出,陰影衰落的相關性隨著節點間距離的增大而減小。因此,在RSS 測量中有必要考慮錨節點之間的空間相關性。這里我們假設錨節點間的陰影衰落服從一個N維的高斯分布,其均值是零向量,方差由一個函數定義的協方差矩陣表示。這里我們選擇Matérn 協方差函數[11]:
其中dij表示錨節點i,j間的歐式距離,函數Γ(·)是普通的伽馬函數,Kv(·)是改良的v階 Bessel函數,它控制著實現隨機域的平滑度,本文中我們選擇v=3。φ是空間相關性系數,它控制著衰減程度,σw是邊際差,它控制著函數在預期范圍內的輸出。
根據圖2 中的測量模型,假設錨節點處配備(如定向天線、天線陣列等)去獲得AOA 測量值。因此,仰角?可以通過簡單的幾何結構建模為:

其中mi是角度的測量誤差,是一個零均值標準差為σm的高斯隨機變量。在測量向量Y=[P,?]T基礎上,我們可以得到未知目標節點的條件概率密度函數:
由于ML 估計的高度非凸性以及無封閉解,算法可能陷入局部極小值,導致定位誤差較大。因此,引入BHM 來分別考慮空間相關的陰影衰落分量。
2 貝葉斯分層模型和定位估計
在本節中,提出了應用于測量模型的BHM,以及使用空間相關陰影衰落的MCMC 的混合 RSS和AOA 定位方法。
2.1 貝葉斯分層模型
根據RSS和AOA測量模型,錨節點處的 RSS值由路徑損失系數η,測量方差σn2所影響;AOA值由測量方差σm2所約束。且都與目標節點的位置信息有關。與此同時,潛在的陰影衰落過程由相關系數φ和方差σw2所約束。就中的測量模型,引入三層貝葉斯分層模型[2]轉換,詳細模型如下:
● 數據模型:

測量向量Y在隱過程和相關參數下,服從一個多維高斯分布。均值向量μ=[μ1,μ2,…,μ2N]∈?2N×1協方差矩陣為σ=[σn2IN×N,σm2IN×N]∈?2N×2N。均值向量μ為:
這里,假設所有的參數都是相互獨立的,可以得到:

2.2 參數估計
假設我們有一些關于參數的先驗信息。如表1所示,我們可以選擇均值為4,方差為4 的高斯分布作為路徑損失系數的先驗分布。當參數的先驗信息不存在時,可以選擇弱信息的先驗分布。選擇的分布對參數估計的影響不大,參數估計主要是由數據決定的,須將參數的先驗分布控制在合理的范圍內。

表1 不同環境下的路徑損失系數
根據上述貝葉斯分層模型,可以得到參數的后驗分布:

其中p(θ|Y)表示參數的先驗概率密度函數,在測量數據和生成數據下的條件,通過貝葉斯理論,可以得到參數的后驗分布函數,以路徑損失系數η為例:

上式積分難求閉式解,應用MCMC 方法對(12)進行采樣,然后計算采樣結果的均值作為仿真參數。
2.3 RSS-AOA 混合定位估計
根據上述三層貝葉斯分層模型,提出了一種基于MCMC 方法估計目標節點位置信息后驗分布的方法。在初始節點發送功率,在錨節點接收到的測量數據Y和錨節點位置信息已知的條件下,可以得到目標節點在發射功率Pt時位置信息s=[sx,sy]的后驗概率分布:

由參數的先驗分布p(θ|Y,L),采樣一組參數θ的樣本{θ(i)},i=1,2,…,K。根據采樣的參數樣本在p(s|Y,θ(i),Pt)上對每一組θ(i)采樣{s(i),Pt(i)}。考慮在實際監測環境中,目標節點的發射功率未知,因此,在上述貝葉斯分層模型中,將Pt當作一個未知參數去估計。新的參數模型如下:

由于陰影衰落受錨節點間的距離和相關系數影響,因此,數據模型和過程模型沒有改變。根據在未知目標節點發送功率,以及接收到的測量數據,應用MCMC 算法去估計參數模型θ^ 中的s,Pt的后驗預測分布:

首先,從p(θ|Y,L)中采樣{θ(i)},然后對每一個θ(i)從p(s,Pt|Y,L)中采一組,最后計算目標節點的估計信息:

3 仿真結果與分析
在本節中,考慮在500m×500m 的二維區域中的定位問題。如圖1 所示,在觀測區域中均勻部署100 個錨節點。
3.1 仿真數據
根據隨機生成的初始節點i位置發射功率設置為Pt=30[dBm],生成用于估計參數模型中的相關參數的M=100 組數據,格式如(1)所示。表2 中給出了相關參數先驗信息,并對其進行MCMC 采樣得出其參數的后驗預測分布,如圖3 所示,描述了四條采樣樣本鏈收斂于同一分布。左列為5000 個有效樣本的估計參數核密度,從上至下分別表示η,φ,σw,σn,σm;右列為有效樣本的軌跡圖,說明了算法的收斂性。根據得出采樣有效樣本,計算出樣本均值,作為位置估計的仿真參考數值。

表2 參數的預設先驗信息
3.2 性能指標
(1)均方根誤差
定位性能由均方根誤差 (Root Mean Squares Error,RMSE)來給出:

其中s′表示目標節點的估計位置,Mc的有效采樣次數為5000。
(2)累積分布函數
用預先設定的定位精度,去衡量位置估計的成功概率,選用累計分布函數來評價算法的精度:
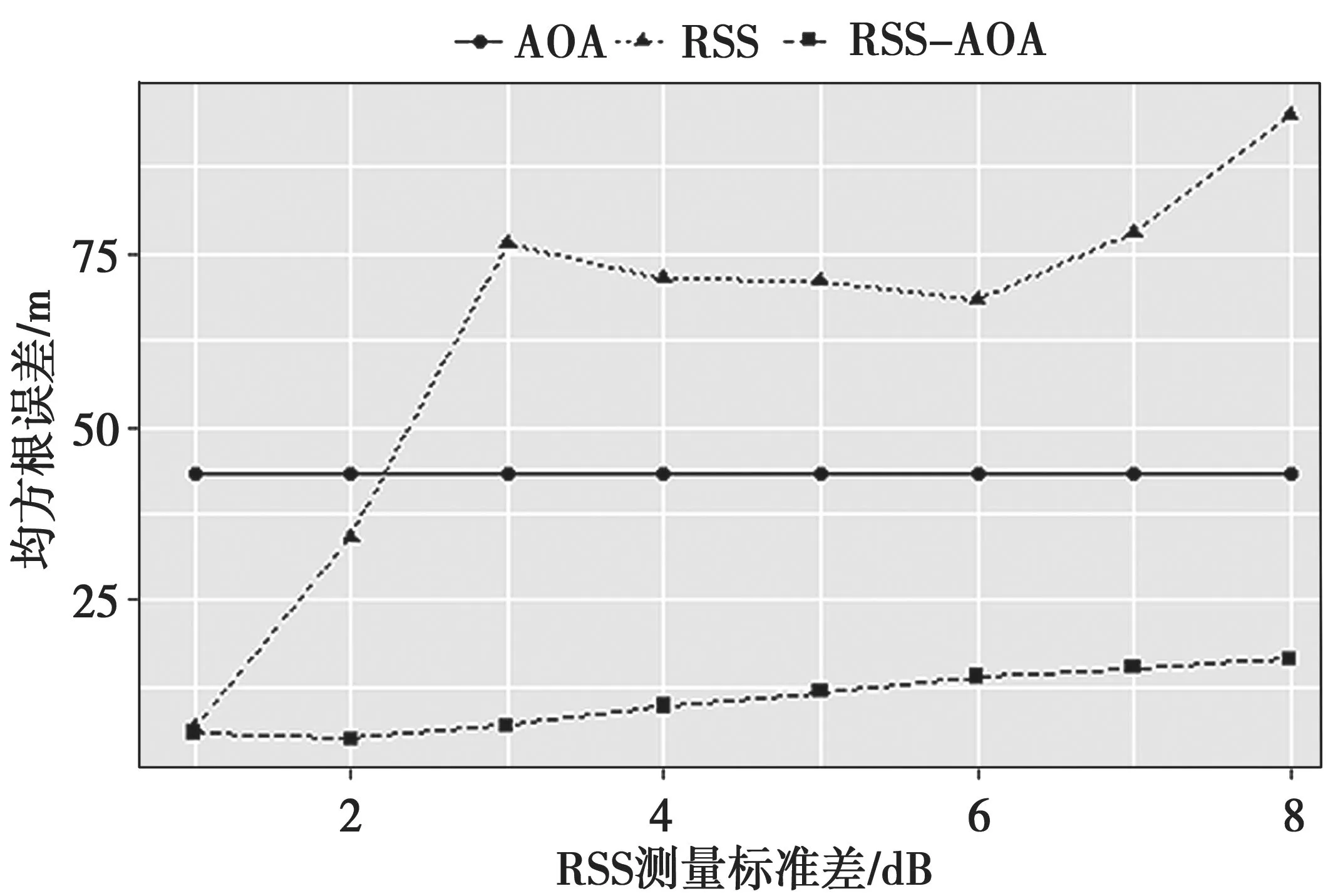
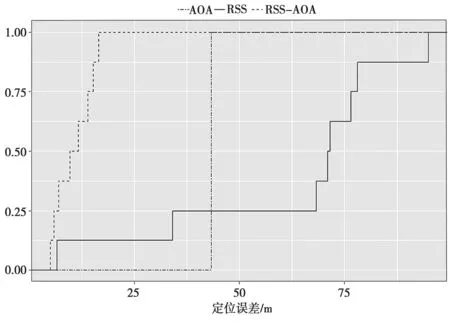
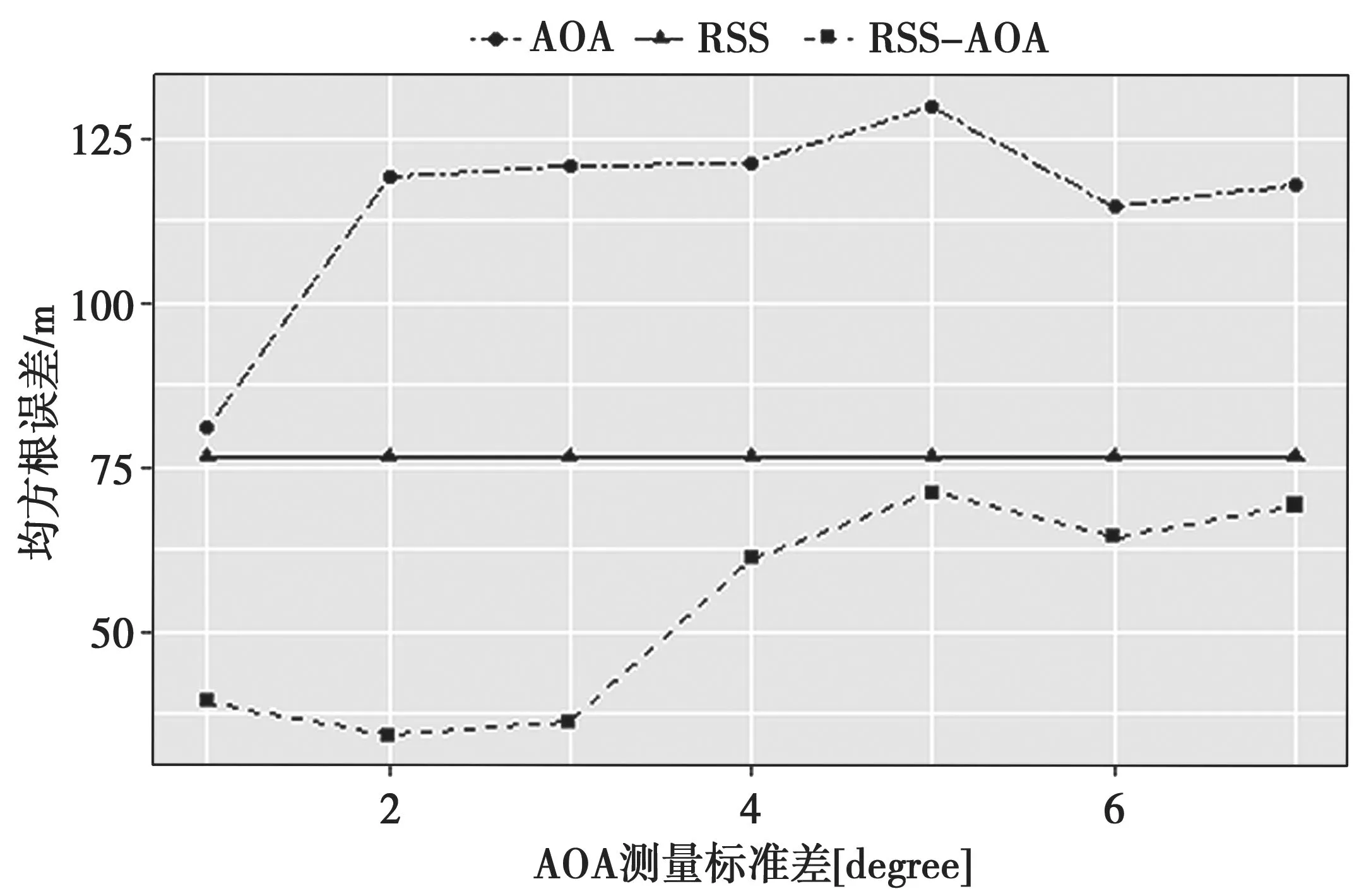
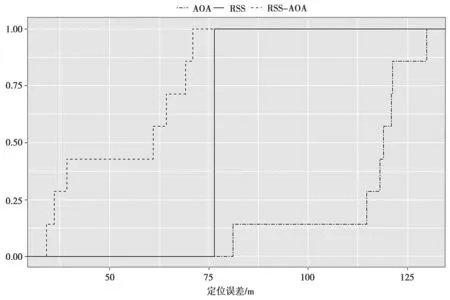
CDF(e)=P(||s′-s|| 其中e表示目標節點和估計節點間的定位誤差距離。 圖3 參數的后驗預測核密度圖以及采樣跡圖 使用Python 環境下的PyStan 包在Jupyter Lab上進行建模仿真工作,實驗參數設置如下:已知位置信息的錨節點數N=100,隨機位置的初始節點發射功率Pt=30[dBm],參數先驗分布如表2 所示,在位置估計仿真中,位置坐標sx,sy是[0,500]上的均勻分布,其他參數設置為表2 中的后驗預測分布的均值。 (1)圖4 為單一RSS、AOA 定位方法和混合RSS-AOA 定位方法在RSS 測量標準差σn的對比圖,如圖所示,在較低的標準差下,單RSS 和混合方法誤差較低,達到6m 左右,隨著標準差的變化,混合方法有較好的穩定性,在較大的RSS 測量標準下,可以結合角度信息對目標節點進行較高精度的定位。由圖5 可以看出,在定位誤差e=16.5m 下,即可達到精確定位。 圖4 定位誤差隨標準差σn 變化趨勢 圖5 定位誤差的累計分布變化 (2)圖6 為在AOA 測量標準差σm下的對比圖,混合定位方法有更高的精度,由于定位場景存在的陰影衰落,導致AOA 測量偏差較大,單一的方法無法進行較為精確的估計。考慮空間相關性的混合定位方法更有效。 圖6 定位誤差隨標準差σm 變化趨勢 圖7 可以看出,混合定位在更低的定位誤差下,可達到精確定位。 圖7 定位誤差累計分布變化 在本文中,提出了一種基于貝葉斯分層模型的混合RSS-AOA 定位方法,通過將陰影衰落轉換成過程模型,考慮了節點間的空間相關性,提高了對目標節點的位置估計精度。仿真結果驗證了定位方法的有效性。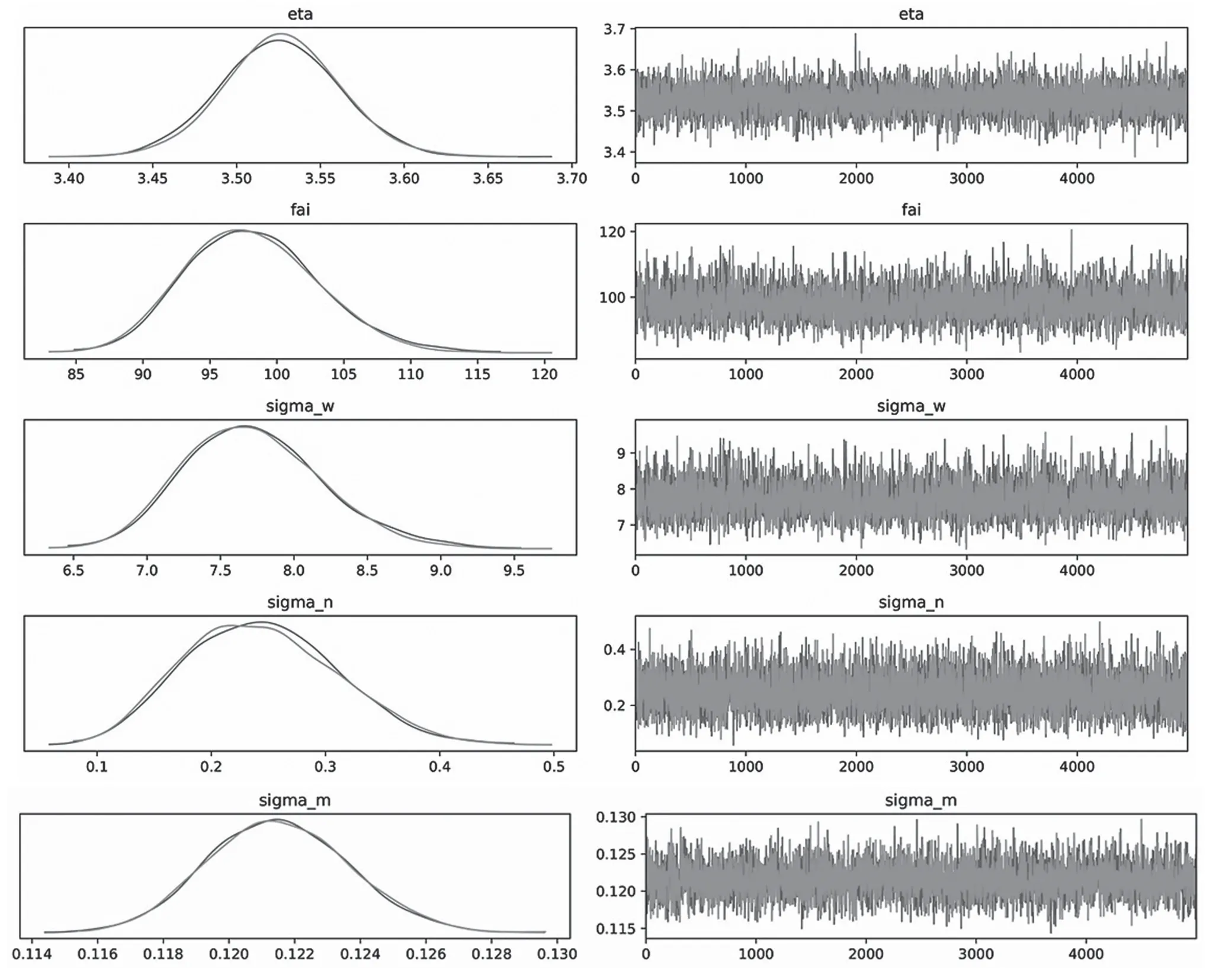
3.3 仿真結果
4 結語
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
光學精密工程(2016年6期)2016-11-07 09:07:19
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
核科學與工程(2015年4期)2015-09-26 11:59:03