基于電流預測控制的BLDCM換相轉矩脈動抑制方法
2020-12-23 12:28:10王日茗楊建飛王浩亮王志偉樊溫新
微特電機 2020年12期
關鍵詞:方法
王日茗,楊建飛,2,邱 鑫,2,王浩亮,王志偉,樊溫新
(1.南京師范大學 電氣與自動化學院,南京 210046; 2.南京智能高端裝備產業研究院有限公司,南京 210042;3江蘇遠東電機制造有限公司,泰州 225500)
0 引 言
無刷直流電動機(以下簡稱BLDCM)由于其結構簡單、功率密度高、成本低等優點,非常適用于各種工業應用,受到了研究人員的廣泛關注[1-4]。然而,由于定子電感和有限的直流電壓限制了換相過程相電流的快速變化,導致在換相過程中產生轉矩脈動。而換相轉矩脈動過大又會導致電機振動和噪聲,極大限制了BLDCM的應用[5-6]。
由于以上原因,BLDCM換相轉矩脈動抑制一直是熱點研究問題[7-16]。文獻[7]分析了換相轉矩脈動成因,并指出保持非換相相電流恒定,可以抑制轉矩脈動。文獻[8]通過對電壓擾動進行補償,使非換相相電壓保持恒定,從而使該相電流保持穩定。但是這種方法在高速范圍適用性差,針對寬速范圍換相轉矩脈動抑制,許多學者也進行了深入研究。文獻[9-11]采用可調變換器來調節輸入電壓。文獻[9]中,BLDCM在正常導通期間由直流電源供電,同時,由Sepic轉換器調節換相過程所需電壓,從而實現全速范圍內的換相控制。文獻[10]增加Cuk轉換器來改變逆變橋的輸入電壓。Cuk變換器在正常導通期間工作在buck模式,在換相期間通過開關選擇電路將Cuk變換器的輸出模式轉換為升壓模式,從而保持非換相相電流穩定。文獻[11]提出一種Z源逆變器的換相轉矩脈動抑制策略,通過引入矢量方法來提高直流電壓。上述方法存在硬件開銷大的問題,難以實現實用化。文獻[12-13]將電機轉速劃分為低速、高速兩個區間,根據這兩個區間在換相過程分別采用不同的控制策略來抑制轉矩脈動。文獻[12]中,低速段對非換相和關斷相進行PWM調制,高速段對關斷相進行PWM調制。文獻[13]中,低速段采用兩相導通方式,高速段采用兩相導通和三相導通相結合的控制方式,根據不同的轉速范圍選擇不同的電壓矢量。這些方法雖然能夠抑制全速范圍換相轉矩脈動,但是換相瞬間具有控制上的滯后性,難以對轉矩進行實時補償。為解決這一問題,預測控制方法得到廣泛應用。文獻[14]提出了一種基于有限狀態模型的預測控制方法,該方法根據非換相相電流預測模型和代價函數選擇最優開關狀態,但是模型建立過于復雜。文獻[15]采用電流預測控制對BLDCM的進行控制,但是對預測電流的給定值計算過程中進行了估算,計算過于粗糙。文獻[16]在BLDCM直接轉矩控制換相轉矩分析過程中引入了三相交流電機分析過程使用的坐標變換理論,得到換相電流和換相時間的相關約束,最后使用圖解法實現換相轉矩脈動抑制。但是該方法使用的坐標變換增加了計算復雜度,并且在公式推導過程使用到電感參數,而實際電機電感難以精確測量,導致算法實現更加困難,算法有待優化。
由于直接轉矩控制(以下簡稱DTC)有優異的轉矩響應性能,大量學者對其展開了深入研究[17-20],文獻[17]通過選擇6個電壓矢量和零矢量建立了傳統6扇區BLDCM DTC矢量控制方案。文獻[18]發現由于二極管續流,傳統全關斷零矢量作用效果相當于反矢量。文獻[19]重新構造了BLDCM DTC零矢量,消除了二極管續流現象,同時建立了一種12扇區BLDCM DTC控制方案,有效消除了關斷相電流,較大降低了轉矩脈動。文獻[20]在此控制方案基礎上加以延伸,提出了12扇區BLDCM DTC占空比控制方法,其對非換相期間和換相期間轉矩脈動都具有較強抑制作用。本文在此12扇區BLDCM DTC占空比控制方法基礎上進行換相轉矩脈動控制研究,提出一種以轉矩控制環輸出為預測電流給定的換相轉矩脈動抑制策略。仿真驗證了此算法的有效性。
1 兩相導通BLDCM DTC數學模型
兩相導通控制方式下,具有理想梯形反電動勢波形的BLDCM能夠得到最大轉矩輸出。BLDCM反電動勢和電流波形圖如圖1所示。圖1中,ea,eb,ec表示定子相反電動勢;ia,ib,ic表示定子相電流。
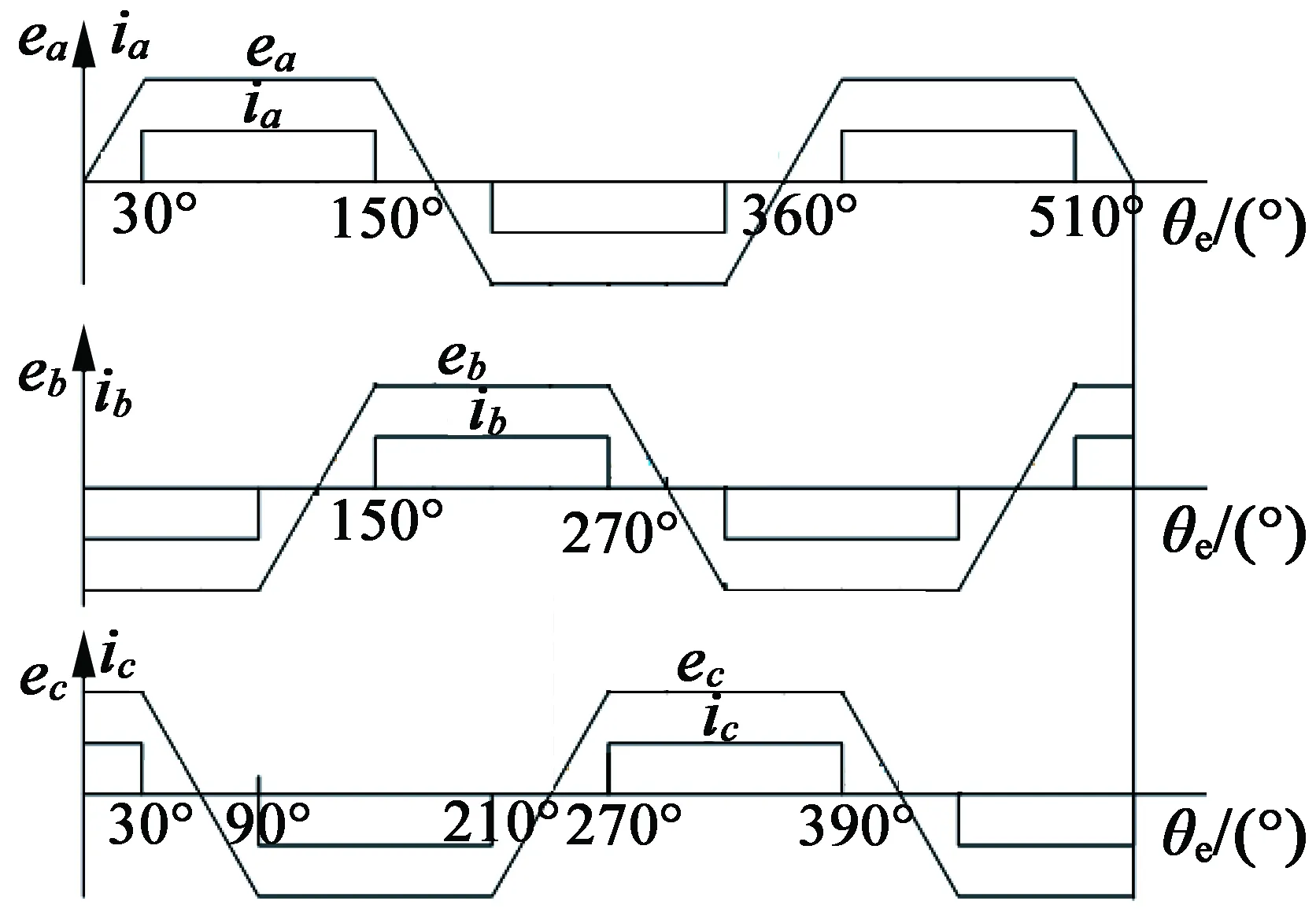
圖1 BLDCM三相反電動勢和電流波形
對于定子采用三相星型、無中線連接的BLDCM,其與電壓型逆變器等效電路如圖2所示。
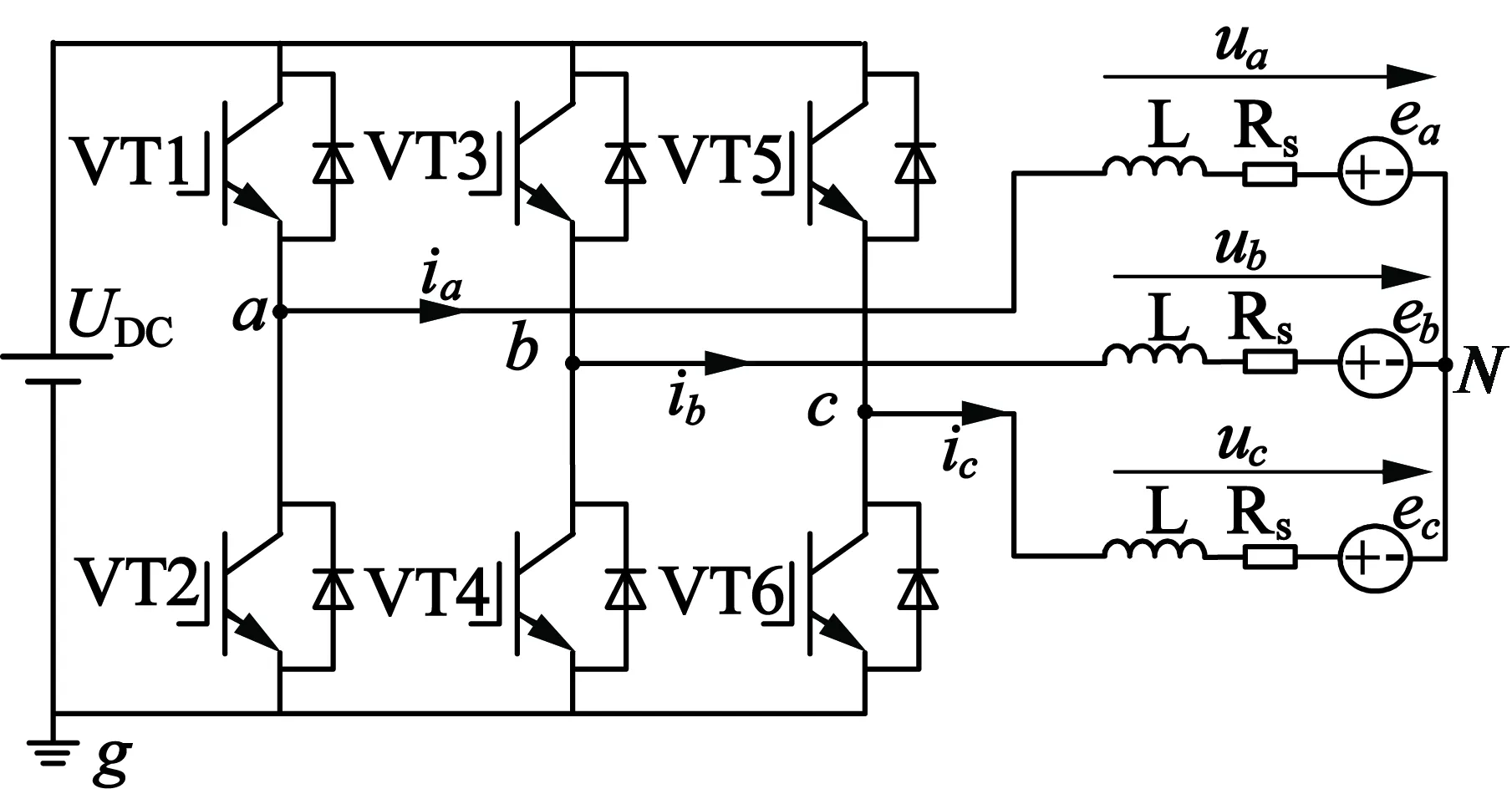
圖2 BLDCM與逆變器等效電路圖
其中,VT1~VT6表示6個開關管;ua,ub,uc為定子三相電壓;Rs,L為定子每相電阻與等效電感;UDC為直流母線電壓;N為中性點;g為直流母線地。
定子繞組采用星型接線的BLDCM端電壓測量簡單,其端電壓方程:
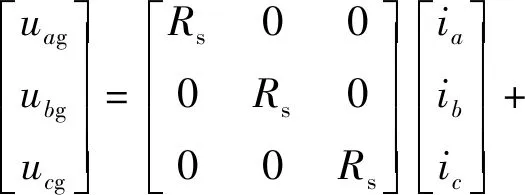
(1)
uag,ubg,ucg分別表示三個端點的對地電壓;Rs是定子相電阻;ia,ib,ic是定子三相電流;LM是定子等效電感;ea,eb,ec是三相反電動勢;ung表示中性點對地電壓。
轉矩方程:
(2)
式中:Te表示電機轉矩;Ωr表示轉子機械角速度。
本文算法是基于12扇區BLDCM DTC占空比控制方案,將電機旋轉360°電角度周期分為6個大扇區,每個大扇區根據不同零矢量劃分為2個小扇區,矢量選擇表如表1所示。
表1中,τ為轉矩狀態信號,τ=1是轉矩增加信號,τ=0是轉矩減小信號。Vxy為零矢量,其中x表示開關管導通狀態:7表示導通兩個上橋臂開關管,0表示導通兩個下橋臂開關管;y表示扇區:由于4、5、6大扇區分別與1、2、3大扇區的零矢量開關狀態一致,因此統一采用1、2、3大扇區內的零矢量標定,不再另行編號。
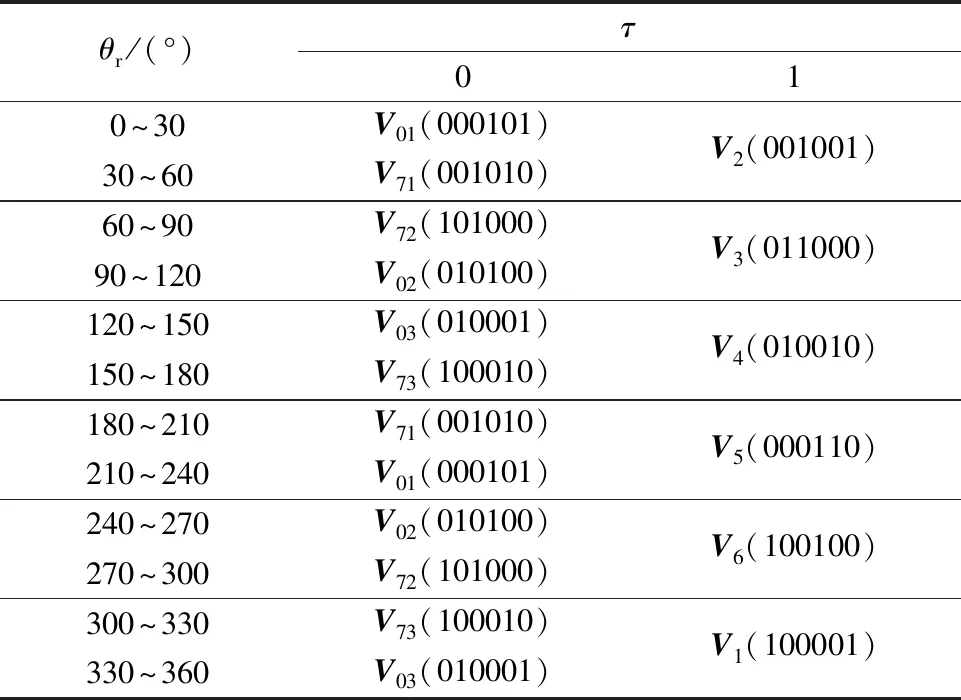
表1 BLDCM DTC 12扇區矢量選擇表
2 兩相導通BLDCM換相轉矩脈動分析
由于相電感的存在,實際電機在換相時,導通相與關斷相的電流變化率不同,導致非換相相電流波動,從而引起換相轉矩脈動。換相過程電流轉矩可能出現如圖3所示的情況。
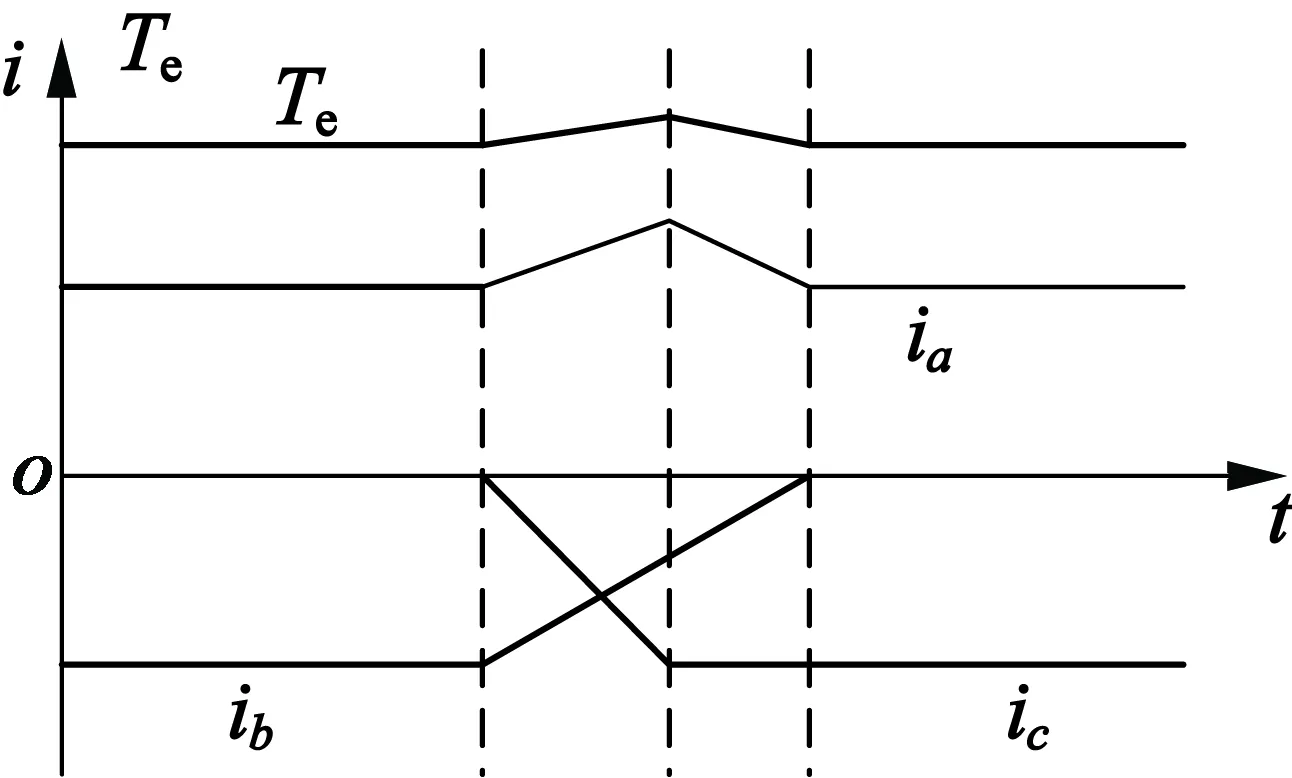
(a) 低速段

(b) 高速段
低速段,開通相電流上升速度大于關斷相電流下降速度,導致換相轉矩脈動。通過對開通相進行PWM斬波控制,抑制開通相電流上升速度,強制其與關斷相電流下降速度相等,進而達到抑制換相轉矩脈動的目的,同時,采用電流預測算法解決控制滯后的問題。
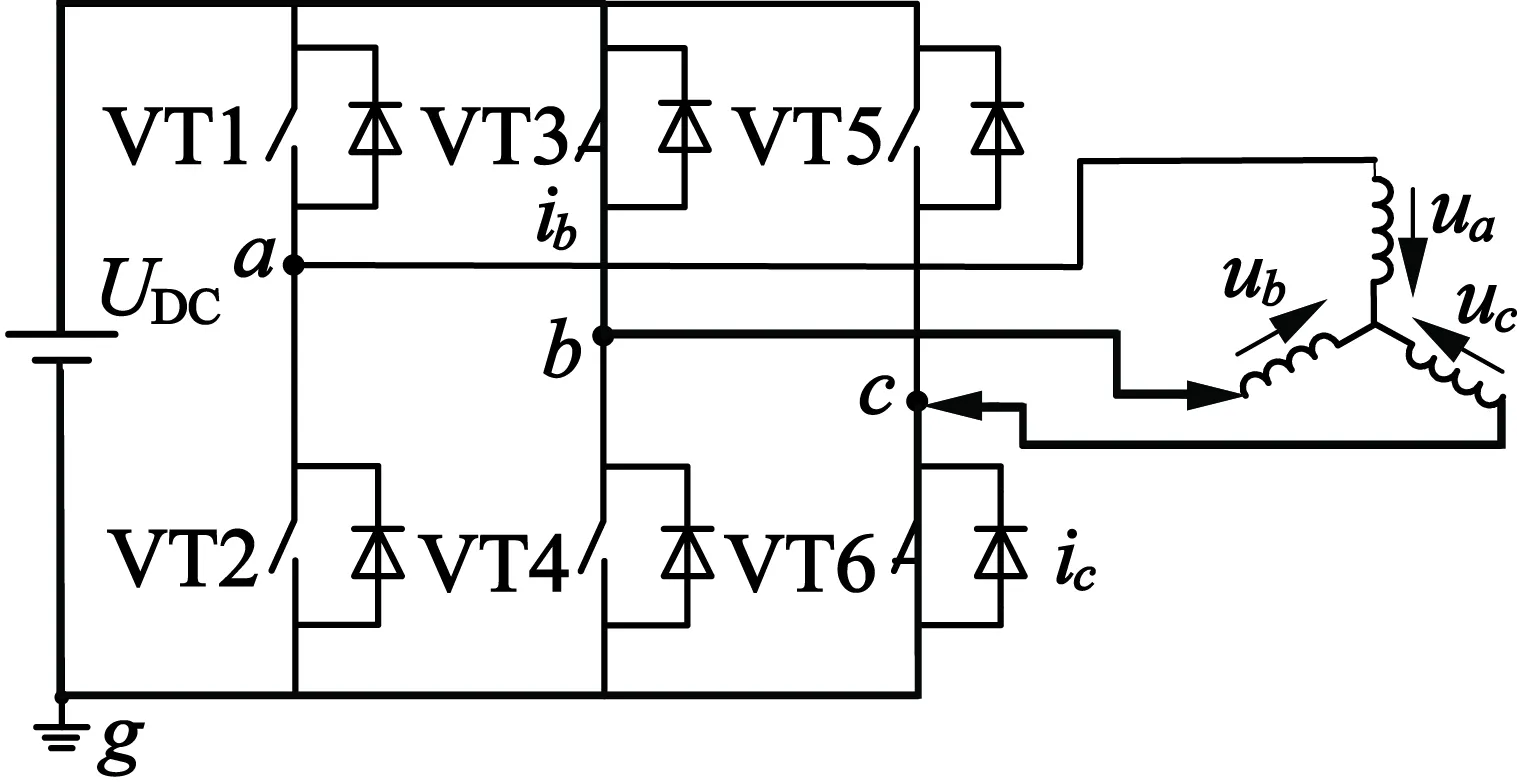
以A+C-到B+C-換相過程為例,換相過程開關狀態和電流方向如圖4所示。
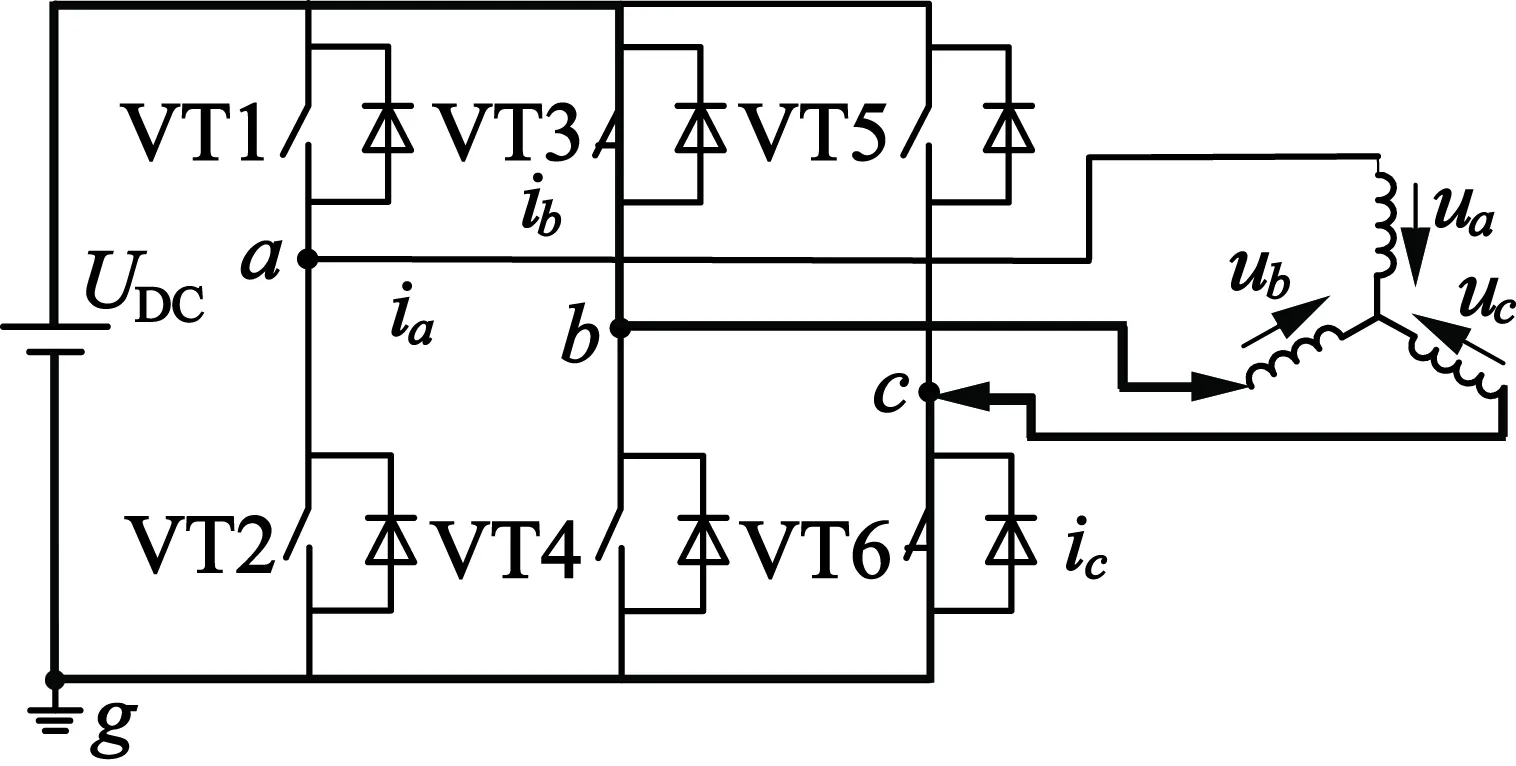
(a) 換相期間開通相導通

(b) 換相期間開通相關斷
列寫三相電壓方程:
(3)
式中:Ua,Ub,Uc是定子三相相電壓;D1為開通相占空比。由式(3)可得:
(4)
式中:Uac,Ubc為兩相線電壓;E為反電動勢峰值,由式(4)可得:
(5)
要使換相期間轉矩穩定,三相電流變化率需滿足:
(6)
所以開通相占空比公式:
(7)
對式(7)進行離散化,可得:
(8)
(9)
式中:Ka=E/Ωr為反電動勢系數。故非換相相電流預測值:
(10)
下一周期開通相預測占空比又可寫:
(11)
高速段,開通相電流上升速度小于關斷相電流下降速度,導致換相轉矩脈動。此時開通相常開,通過對關斷相進行PWM斬波控制,延遲關斷相電流下降速度,強制其與開通相電流上升速度相等,進而達到抑制換相轉矩脈動的目的;同時,采用電流預測算法解決控制滯后的問題。
仍以A+C-到B+C-換相過程為例,換相過程開關狀態和電流方向如圖5所示。

(a) 換相期間關斷相導通
(b) 換相期間關斷相關斷
列寫三相電壓方程:
(12)
同理,經過離散化可預測下一周期關斷相占空比:
(13)
又可寫為:
(14)
系統采用純轉矩環控制,控制框圖如圖6所示。
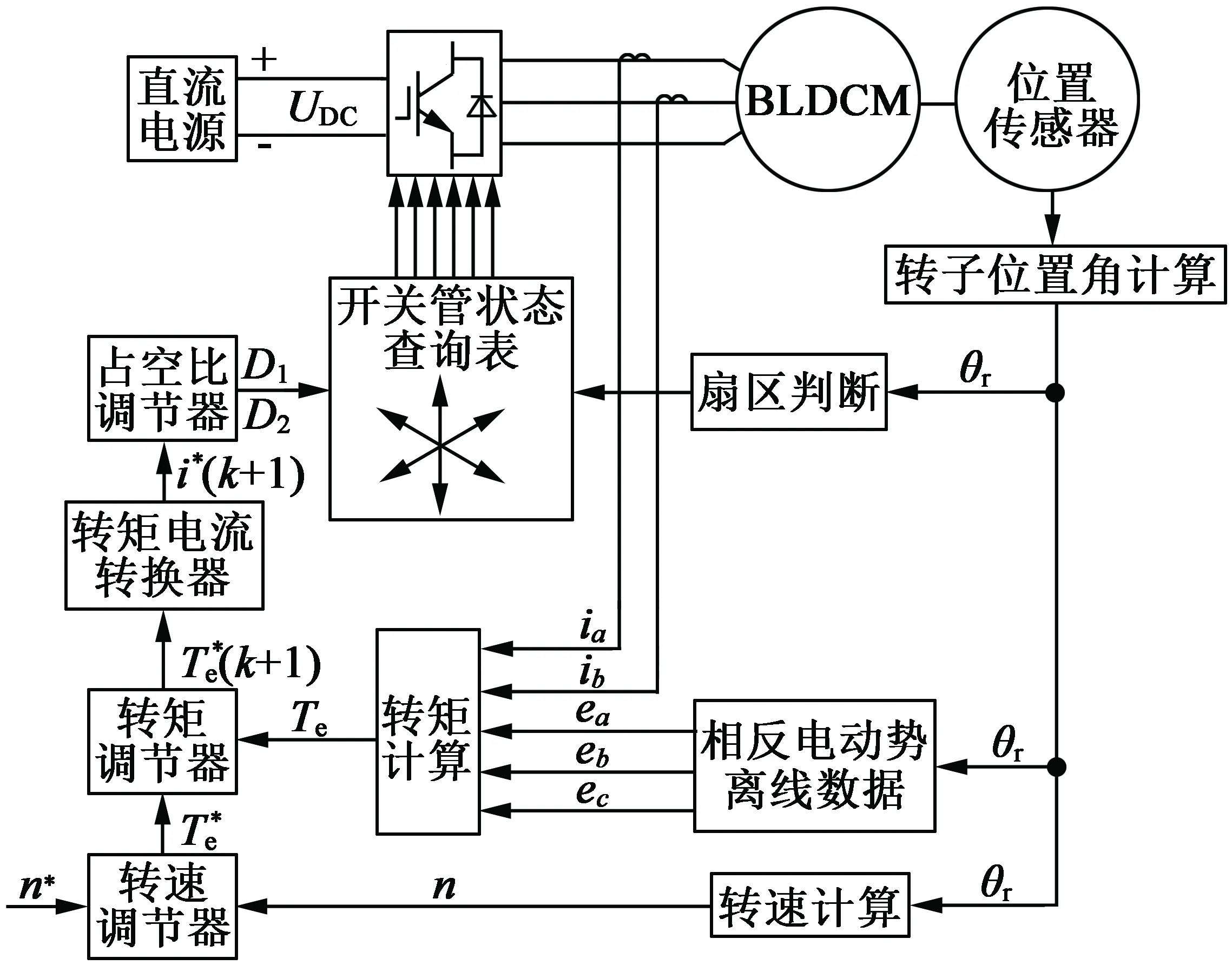
圖6 BLDCM DTC控制框圖
3 仿真驗證
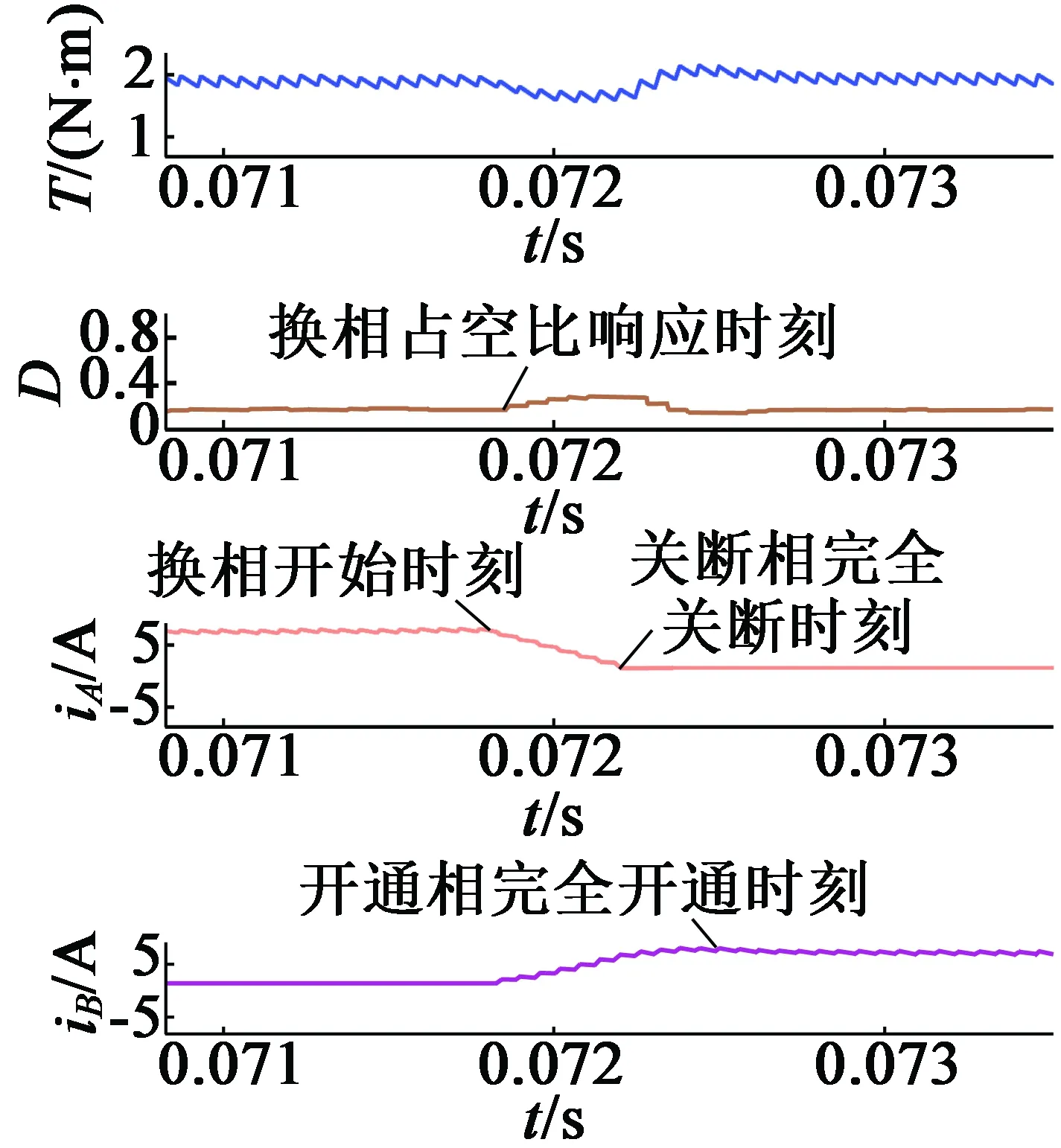
為驗證理論分析的正確性,使用MATLAB/Simulink進行仿真建模分析,仿真控制周期60μs,BLDCM模型參數如表2所示。
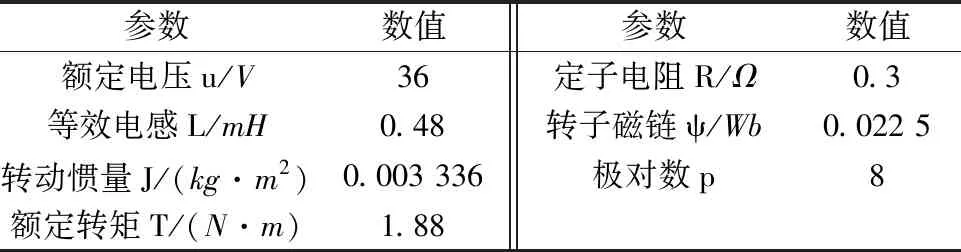
表2 BLDCM參數
仿真在額定轉矩(1.88N·m)下進行,分低速(100r/min)和高速(800r/min)兩組分別進行,驗證電流預測控制算法對換相轉矩脈動的抑制效果。對比仿真為12扇區BLDCMDTC占空比控制算法(下稱傳統控制方法),其本身對換相轉矩脈動就具有較強抑制作用。
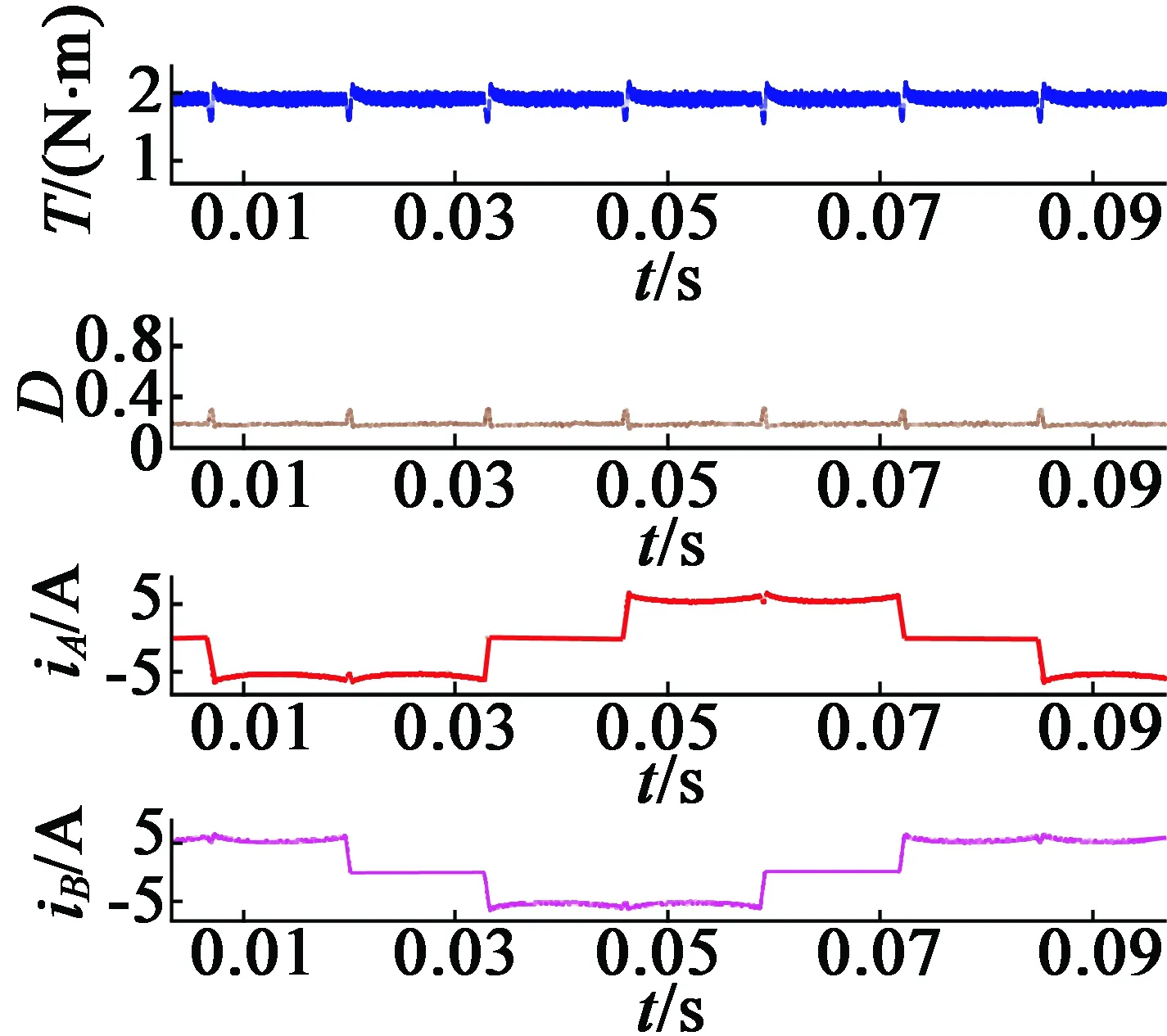
額定負載1.88N·m,低速100r/min時,對比圖7(a)和圖8(a)轉矩波形可知,電流預測控制方法下,換相轉矩基本無脈動;對比圖7(c)和圖8(c)轉矩、占空比、電流放大波形可知,傳統控制方法下,換相占空比開始響應時刻比換相開始時刻延遲了1個控制周期,如圖7(c)所示,這種控制上的滯后性,導致開通相過調制,開通相完全開通時刻比關斷相完全關斷時刻延長了2個控制周期,如圖7(c)所示,最終導致轉矩墜落;而電流預測控制方法下,換相占空比開始響應時刻和換相開始時刻相同,如圖8(c)所示,其控制具有良好的跟隨性,開通相完全開通時刻和關斷相完全關斷時刻相同,如圖8(c)所示,換相轉矩保持穩定。

(a) 傳統控制方法轉矩波形
(b) 傳統控制方法轉矩、占空比、電流波形
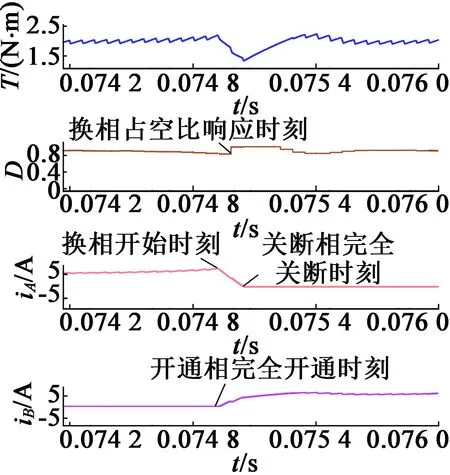
(c) 傳統控制方法轉矩、占空比、電流放大波形
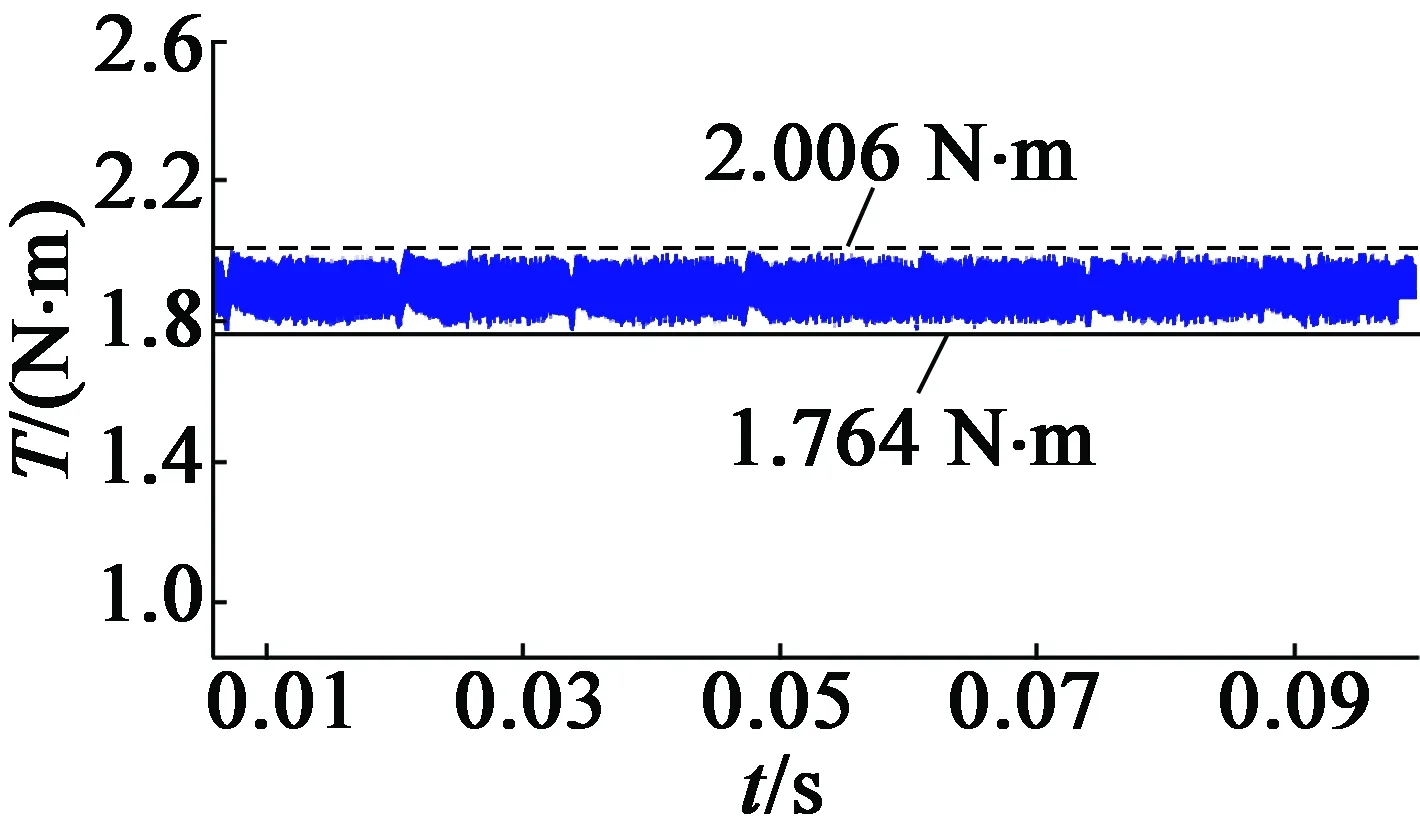
(a) 電流預測控制方法轉矩波形
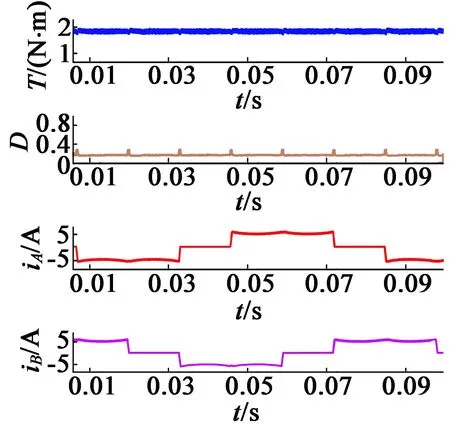
(b) 電流預測控制方法轉矩、占空比、電流波形

(c) 電流預測控制方法轉矩、占空比、電流放大波形
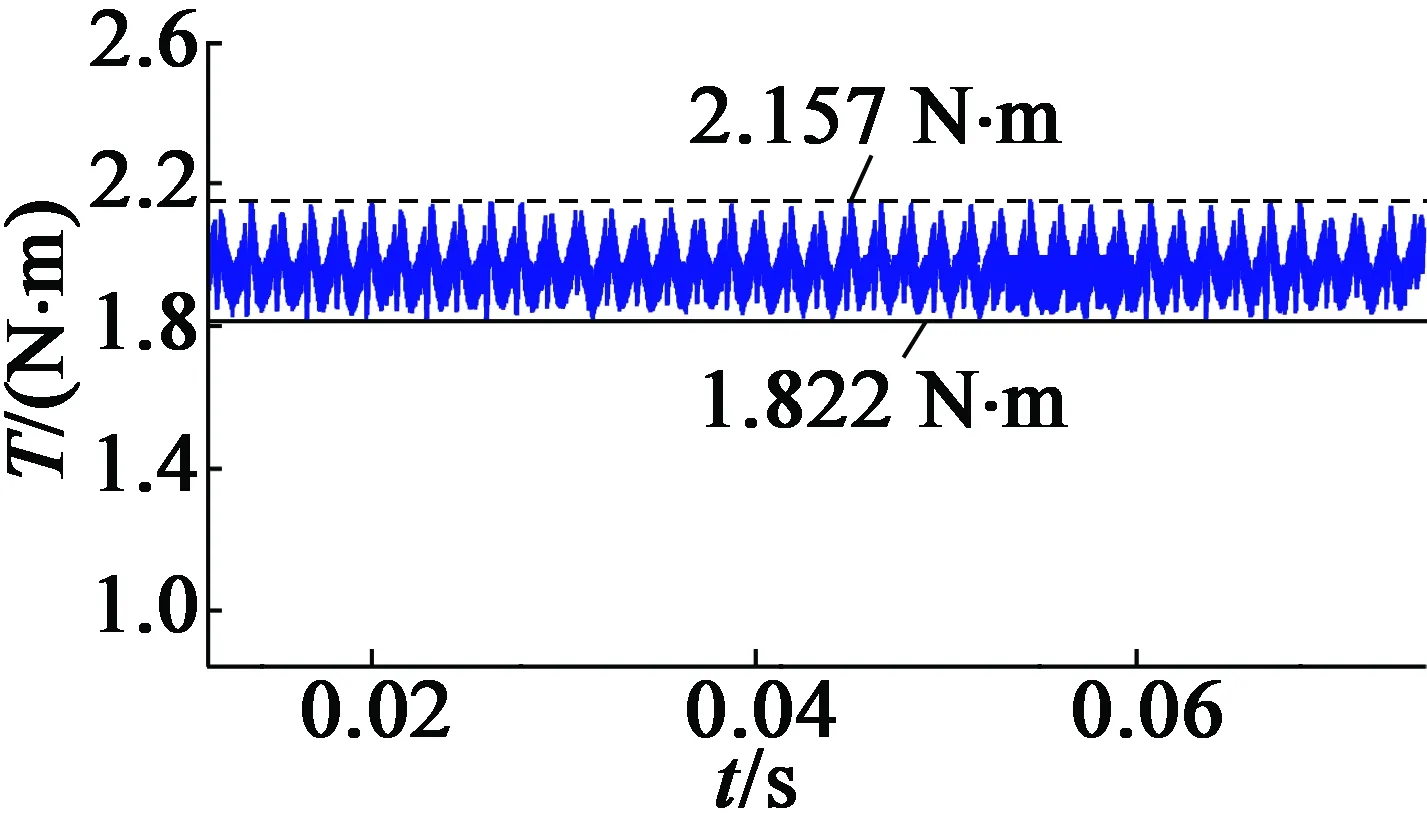
額定負載1.88N·m,高速800r/min時,對比圖9(a)和圖10(a)轉矩波形可知,電流預測控制方法下,換相轉矩基本無脈動;對比圖9(b)和圖10(b),換相期間,傳統控制方法沒有引入關斷相進行占空比控制,即使開通相保持恒通(占空比為“1”)也難以使開通相電流上升速率跟隨關斷相電流下降速率,最終導致轉矩墜落;而電流預測控制方法引入關斷相占空比控制,有效抑制了轉矩墜落;對比圖9(c)和圖10(c)轉矩、占空比、電流放大波形可知,傳統控制方法下,開通相換相占空比開始響應時刻比換相開始時刻延遲了1個控制周期,如圖9(c)所示,這種控制上的滯后性和電壓幅值限制共同導致了開通相完全開通時刻比關斷相完全關斷時刻延長了4個控制周期,如圖9(c)所示,最終導致較大的轉矩墜落;而電流預測控制方法下,開通相完全開通時刻和關斷相完全關斷時刻相同,如圖10(c)所示,換相轉矩保持穩定。
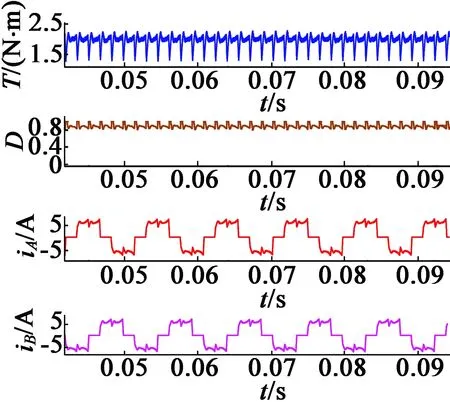
(b) 傳統控制方法轉矩、占空比、電流波形
(c) 傳統控制方法轉矩、占空比、電流放大波形
(a) 電流預測控制方法轉矩波形

(b) 電流預測控制方法轉矩、占空比、電流波形
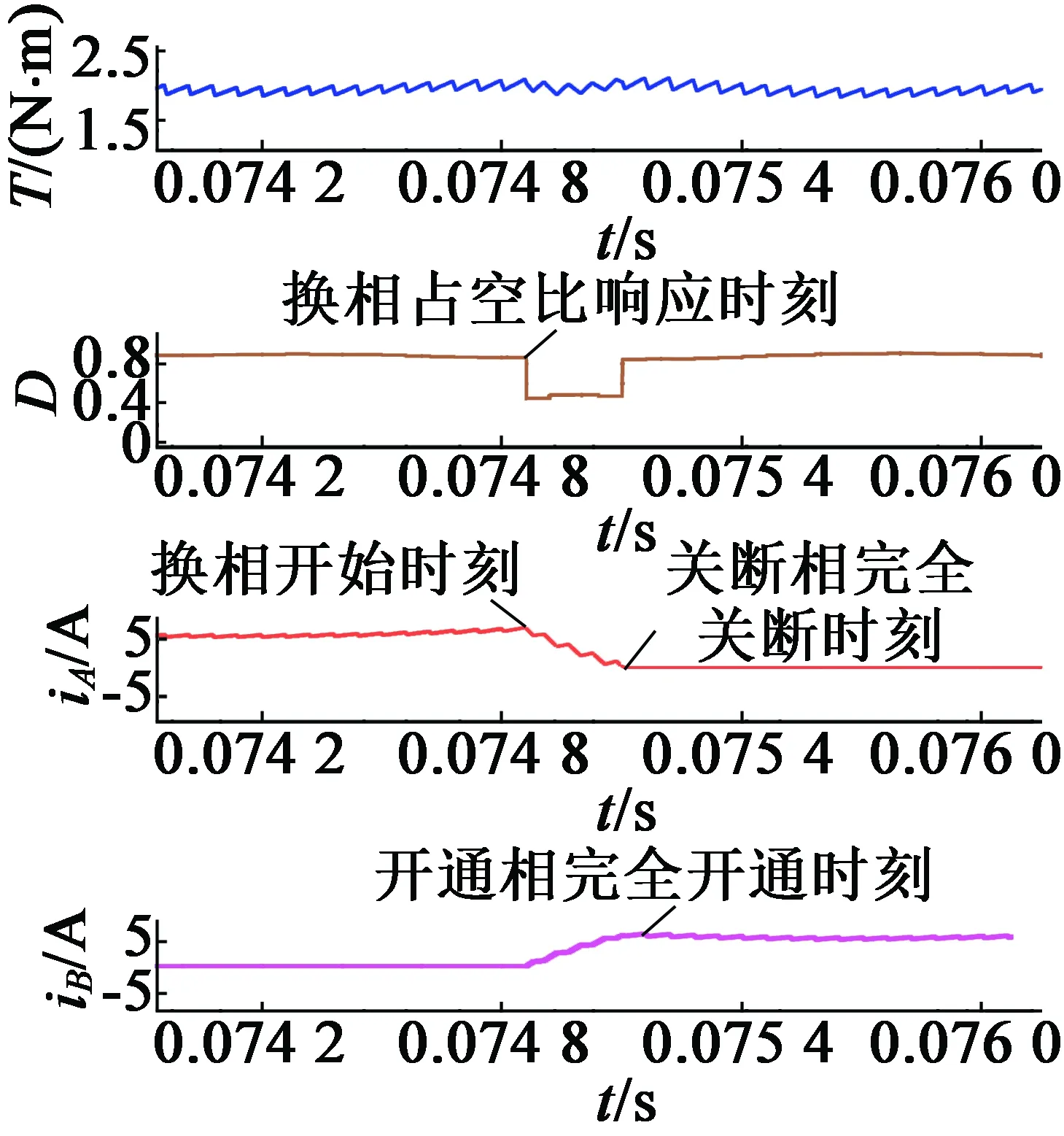
(c) 電流預測控制方法轉矩、占空比、電流放大波形
由表3分析可見,對比傳統控制方法,電流預測控制方法在低速(100r/min)、高速(800r/min)的轉矩脈動抑制率分別達到了18.46%和37.36%,轉矩脈動抑制效果明顯。

表3 轉矩仿真結果對比
4 結 語
本文研究了一種基于電流預測控制的BLDCMDTC系統換相轉矩脈動抑制方法。與傳統方法相比,電流預測方法利用BLDCMDCT轉矩控制環輸出,經過轉矩電流關系轉換得到電流預測值。電流預測過程不依賴于電感等難以測量的電機本體參數,沒有經過相關約去換算,因此電流預測算法計算簡單、預測值精確,并且具有普遍適用性。仿真結果表明,電流預測控制算法能夠有效抑制低速段和高速段的換相轉矩脈動,與理論分析一致。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
