無位置傳感器方波和正弦波驅動永磁電機對比
2020-12-23 12:27:56武文皓郭航城
微特電機 2020年12期
黃 其,武文皓, 席 唯,郭航城
(1.西北工業大學 自動化學院,西安 710072;2.貴州航天林泉電機有限公司,貴陽 550081)
0 引 言
永磁電機由永磁體產生主磁場,省去了電勵磁繞組和鐵心,提高了電機的系統效率;采用電子換相電路,省去了容易磨損的電刷和換向器,延長了電機的使用壽命;同時保持了直流電機的調速性能,廣泛應用于家用電器、電動伺服、工業驅動、車船動力等領域[1]。目前,家用電器每年的永磁電機需求量超過10億臺,電機制造廠需要對電機的成本和性能做出均衡考慮。
永磁電機驅動方式有兩種:方波驅動和正弦波驅動,分別稱為永磁無刷直流電機和永磁同步電機。永磁電機采用方波驅動,繞組電流近似于方波,反電動勢近似于梯形波,通常需要三個HALL傳感器檢測轉子位置用于換相判斷,控制電路簡單,電機出力大,但存在換相轉矩脈動,帶來較大的噪聲,從而限制了永磁無刷直流電機在高精度、低噪聲場合的使用[2]。永磁電機采用正弦波驅動,繞組電流和反電動勢都近似于正弦波,逆變器采用SVPWM算法輸出三相交流電,其頻率、相位和幅值由轉子的位置信號所決定[3]。轉子位置通常由光電編碼器或旋轉變壓器測得編碼信號,再由高性能32位單片機或數字信號處理器(DSP)解算得到具體位置角度。控制算法較復雜,電機輸出力矩穩定,速度平穩,噪聲低,一般應用于伺服控制系統[4]。
傳統的永磁電機通過位置傳感器直接檢測轉子的位置信息,這會增加控制器的成本和體積;在某些特殊環境(如高溫、鹽霧腐蝕)下電機不適合安裝位置傳感器,或者位置傳感器容易出故障,導致整個控制器無法正常運行。而無位置傳感器永磁電機控制器采用間接檢測法得到電機轉子的位置信息,通過檢測相繞組的電流信號和電壓/反電動勢信號,采用特定的程序計算獲得轉子位置信息[5]。但是,無位置傳感器永磁直流電機在起動時刻電流或電壓/反電動勢為零,此時難以計算出轉子位置信息,往往需要其它起動方法,如三段式起動法、高頻注入法、升壓升頻法等[6]。其中三段式起動方法最為成熟,三個階段分別為:轉子預定位、加速運行和切換。
本文針對一款12 V、42 W、15 000 r/min軸流散熱風機用無位置傳感器外轉子永磁電機,采用方波驅動和正弦波驅動兩種控制方式,討論電機在兩種控制方式下的電路拓撲結構和控制算法,最后對樣機在不同驅動方式下進行效率、噪聲、電磁干擾對比實驗。
1 控制原理
軸流風機由扇葉、永磁電機、控制器及支撐架等組成,如圖1(a)所示。電機定子鐵心上的繞組與控制器焊接在一起,電機的外轉子與扇葉一體化安裝。永磁體采用徑向充磁的注塑橡膠磁鋼;定子采用集中繞組結構,便于自動化繞線;氣隙長度0.5 mm,其主要結構參數如表1所示。外轉子永磁電機的定、轉子如圖1(b)所示。

圖1 軸流散熱風機與外轉子永磁電機
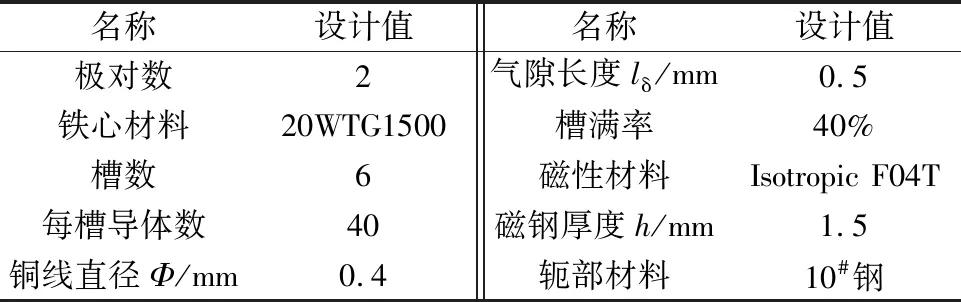
表1 軸流風機永磁電機結構參數
1.1 方波驅動
永磁電機采用方波驅動時,繞組電流波形為方波,反電動勢波形為梯形波,三相繞組通常采用兩相導通六狀態的通電模式,即每個時刻有兩相繞組通電,在一個360°電角度循環過程中換相6次,每次換相電機轉動60°電角度[7],兩相通電繞組的電流為一正一負,如圖2所示。為了使方波驅動永磁電機輸出力矩最大,其氣隙磁密常設計成方波或接近方波,轉子永磁體通常采用表面粘貼結構, 采用分數槽集中繞組減少定位轉矩[8]。

圖2 方波驅動永磁直流電機換相過程
方波驅動永磁無刷直流電機通常采用兩相導通六狀態的工作模式,根據不同的轉子位置在一個導通周期內有6次換相,如圖3所示,Q1~Q6對應的是一個周期內的6個換相時刻。無位置傳感器控制技術是通過檢測繞組反電動勢過零點,再計算出延遲30°電角度的位置,即換相時刻點。單片機根據相鄰兩個換相點的時間差,就能算出電機的速度。

圖3 反電動勢過零點確定換相
方波永磁無刷直流電機通常采用PWM調速模式,即改變逆變器開關管的開通時間(占空比)來改變繞組上的平均電壓,從而實現永磁無刷直流電機的調壓調速,如圖4所示。
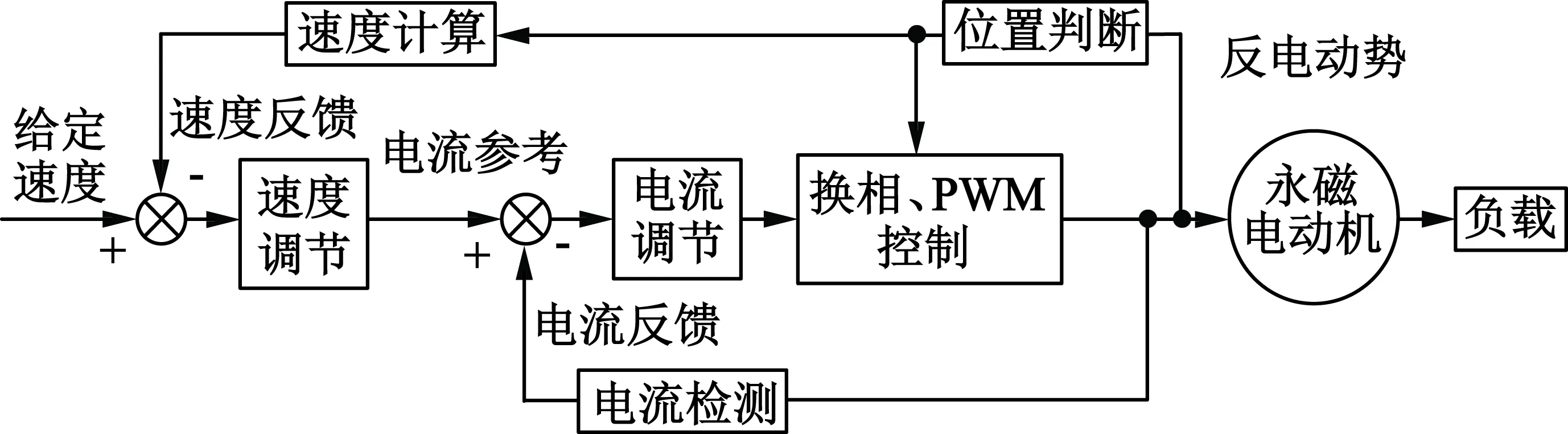
圖4 方波控制調速算法
1.2 正弦波驅動
永磁電機采用正弦波驅動時,繞組電流和反電動勢均為正弦波,正常運行時三相繞組都通電,三相通電繞組的電流為一正兩負或兩正一負。正弦波驅動永磁電機通常采用分數槽短矩繞組結構來減小齒槽轉矩[9]。
無位置傳感器正弦波驅動永磁電機控制原理圖如圖5所示,由位置觀測、坐標變換、SVPWM模塊、速度和電流調節器等組成。滑模觀測器(SMO)用來估算轉子的位置角度,提供給相電流作坐標變換,然后對d軸電流和q軸電流分別進行閉環控制,經過坐標變換和SVPWM模塊驅動逆變器輸出三相交流電,控制永磁電機旋轉。

圖5 正弦波控制原理圖
無位置傳感器正弦波驅動永磁電機的位置和轉速可根據測量電機的電流和電壓估算出來,滑模觀測器(SMO)是一種簡單且性能較好的算法[11]。永磁同步電機的電壓平衡方程由空間電壓矢量、電阻、電感、電流和反電動勢組成[10],如下式:
(1)
式中:Ix為電機電流矢量;ex為反電動勢矢量;Vx為輸入電壓矢量;L為繞組電感;R為繞組電阻。
在數字域中,式(1)可表示:
(2)

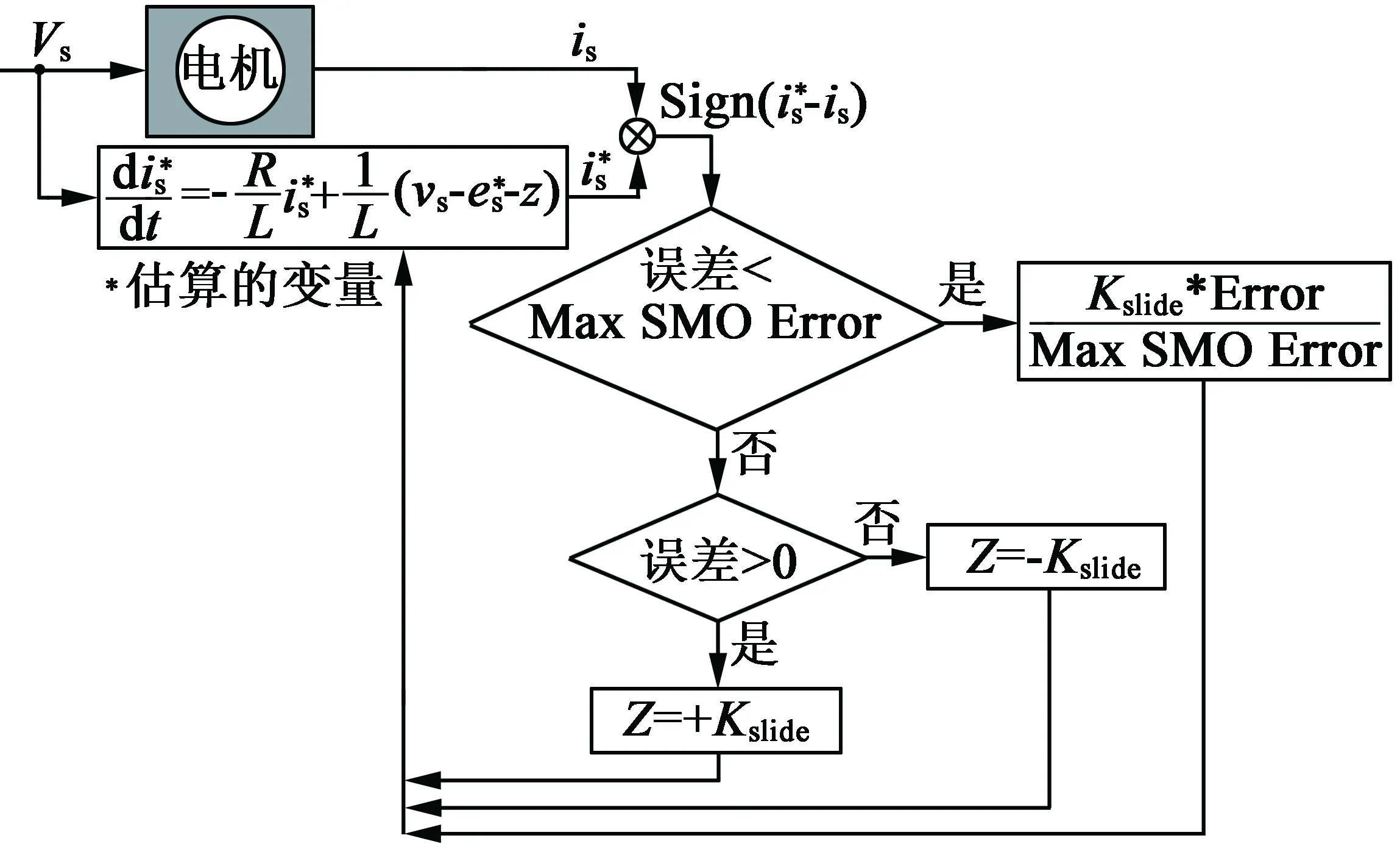
圖6 電流觀測器框圖

θ*=arctan(eα,eβ)
(3)
上述計算位置角度θ*是使用了濾波函數,在使用θ*進行坐標變換前需對相位進行補償,補償大小取決即電機的速度,θ*補償量計算如圖7所示。
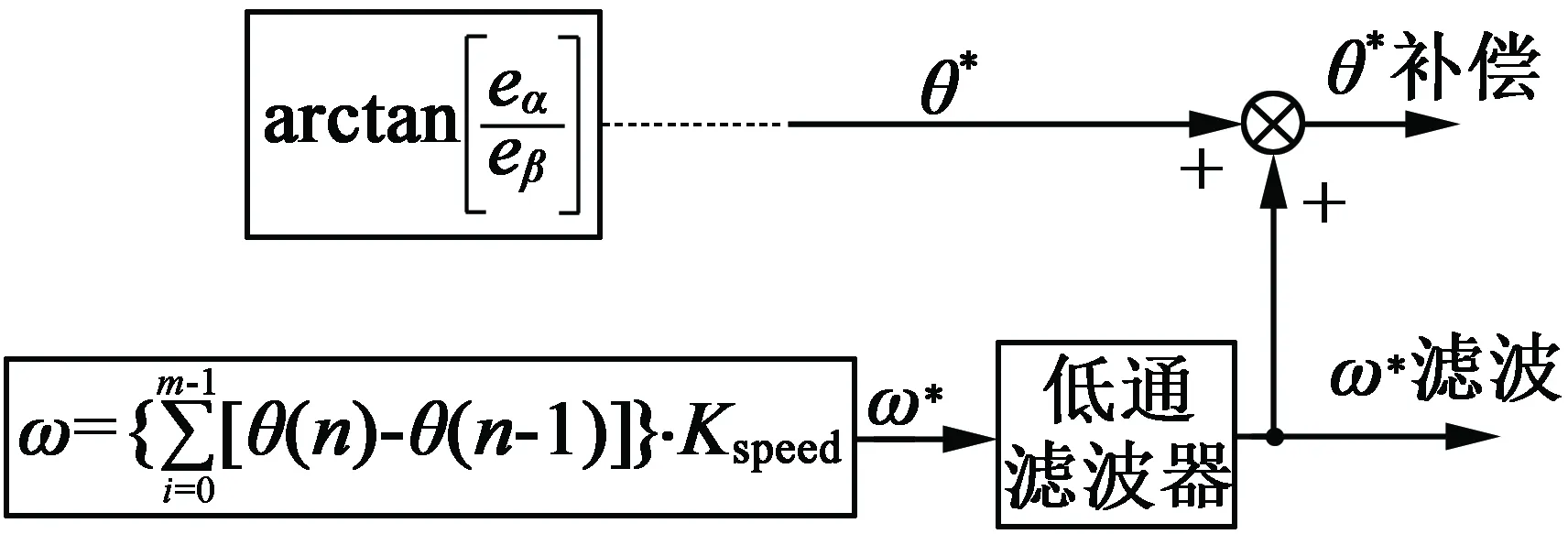
圖7 速度計算框圖
1) 由未補償的θ*計算得到電機的速度ω;
2) 對速度ω進行濾波處理,得到ω*,再計算θ*的補償量[12]。
2 控制電路
由上述分析可知,永磁電機采用無位置傳感器控制器技術對控制芯片的運算能力要求較高,通常采用高性能16位/32位單片機或DSP。目前各個芯片公司的產品都形成系列化,可根據產品的具體應用情況增設功能模塊,方便用戶節約成本。無位置傳感器永磁電機的另一種方案是采用電機專用控制芯片,通常內部集成了電機控制器運算內核和普通單片機內核,如國外安美森公司的MC330XX芯片和邁來芯公司的MLX81XX芯片;國內有峰岹FU6831,靈動微電子MM32SPIN,華芯微特SWM181、新唐NM1820等。專用控制芯片具有性價比高、外圍電路搭建簡單、開發周期短等特點。
2.1 方波驅動控制電路
圖8為永磁電機方波驅動控制的結構圖,包括專用單片機、防反接電路、三相橋式逆變電路以及電壓/電流檢測電路等部件。專用單片機內部集成了線性電壓變換LDO、運放比較器、PWM驅動電路;防反接電路由串聯在母線正極的二極管構成;三相橋式逆變電路由6個MOSFET組成,連接永磁無刷直流電機的三相繞組;根據歐姆定律,用采樣電阻上的電壓降除以電阻值就得到母線電流值,用于電流閉環控制和過流判斷[13]。
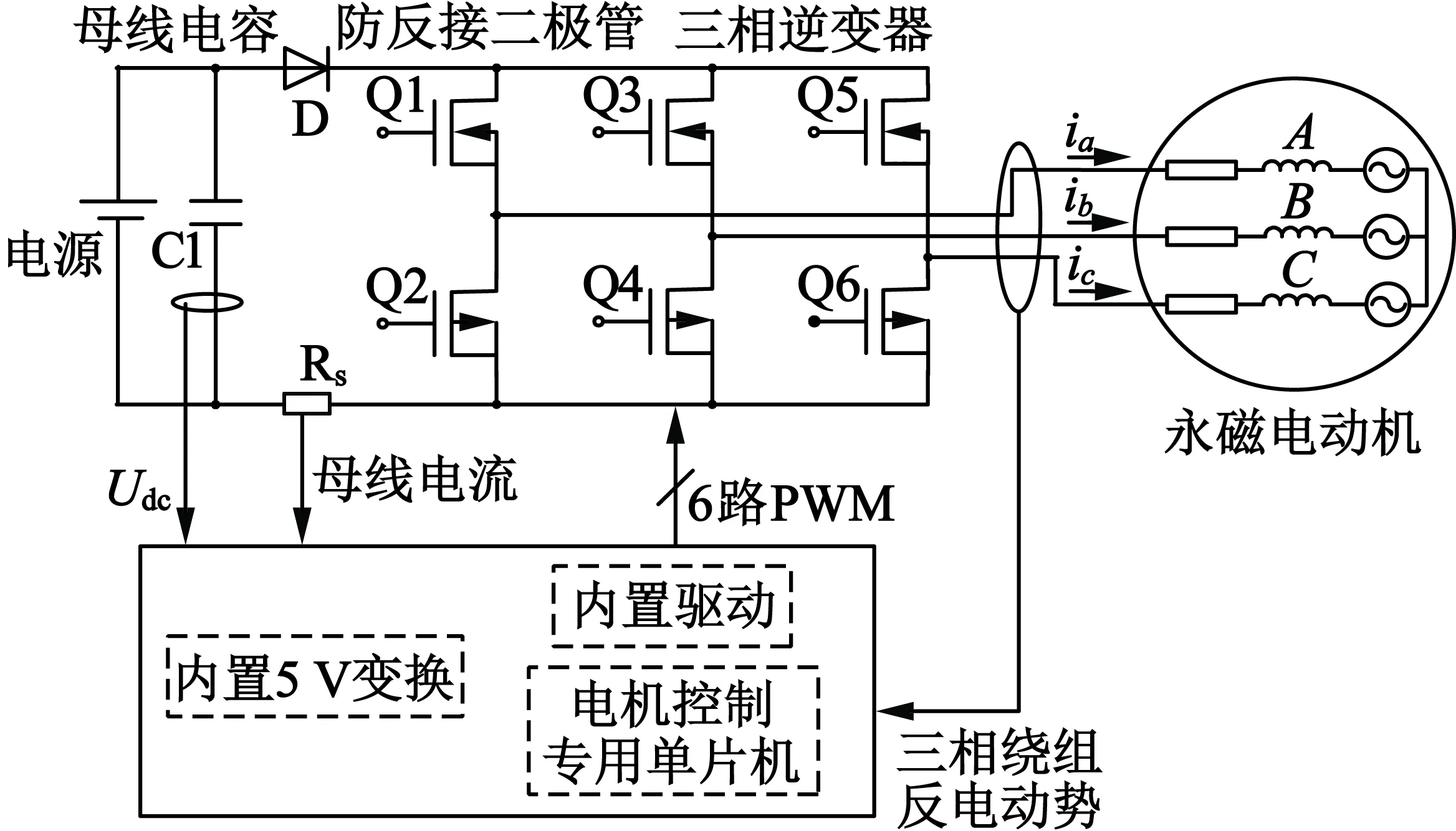
圖8 永磁電機控制器原理圖
單片機的AD采樣電壓范圍較窄(0~5 V),電機的相繞組反電動勢值有可能超出采樣電壓允許值而損壞單片機,因此通過電阻分壓法來降低檢測值,在程序處理時乘以比例系數就得到實測值。在三相反電動勢的檢測輸出端連接一個Y型電阻,構建虛擬中性點平均數值,三相反電動勢輸出點和虛擬中性點連到單片機的運放比較器輸入端口,比較器輸出端口出現電平轉換即反電動勢過零點[14],如圖9所示。

圖9 反電動勢檢測電路
2.2 正弦波驅動控制電路
正弦波驅動永磁電機的控制器硬件電路與方波驅動的大部分相同,只是控制算法不同。正弦波永磁電機控制在進行坐標變換時需要檢測三相繞組電流,通常采集兩相電流再計算出另一相電流,所以控制器至少需要安裝兩個電流傳感器。但采用兩個或多個電流傳感器,要求控制芯片具備多路A/D轉換器,這會增加單片機的硬件接口成本,同時多路A/D轉換會增加單片機的運算時間。
電流采樣通常有兩種方法:一種是檢測精密電阻上的電壓,如圖10所示,再根據歐姆定理計算出電流,該方法成本低,但電流流過精密電阻會產生一定損耗,溫度較高時存在溫漂,適合電流較小的應用場合;另一種是直接通過霍爾電流傳感器獲得一個電壓信號,該方法能測量大電流且功耗小,電流傳感器與繞組之間相互隔離,但成本高、體積大。控制器通過電阻分壓法來測量電源母線電壓。
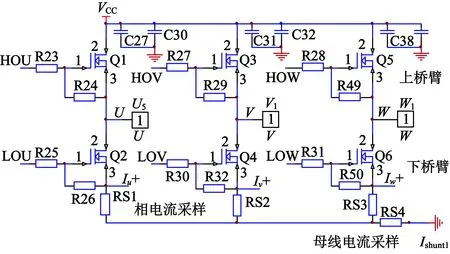
圖10 電路檢測電路
正弦波驅動永磁電機也是采用電流內環、速度外環的雙閉環結構,但是在控制過程中要經歷三次坐標變換,其中兩次坐標變換涉及到角度函數計算,還要采用SVPWM算法生成空間矢量電壓,運算量較大,對控制芯片的性能要求較高。
Clarke變換是三相靜止繞組A,B,C和兩相靜止繞組α,β之間的變換,如下式:
(4)
Park變換是兩相靜止坐標系α,β向兩相旋轉坐標d,q的轉換,如式(5)所示,對應的Park逆變換如式(6)所示。
(5)
(6)
2.4 起動方法
(1) 方波驅動
方波驅動根據反電動勢過零點判斷換相,但電機在起動瞬間反電動勢為零,無法進行過零點判斷,需要通過其它方法讓電機起動。常用的手段是三段式起動[15]:先定位,給電機的一相或兩相繞組通電,讓轉子固定到某一位置;然后加速,按照兩相導通六狀態的原則,控制逆變器的MOS管循環導通,并將導通時間逐漸減少,使氣隙磁場的切換速度加快,相應的轉子速度也增加;第三步切換,當轉子速度足夠大,單片機能夠持續正常檢測到反電動勢過零點比較信號時,切換到無位置傳感器控制模式。
(2) 正弦波驅動
無位置傳感器正弦波驅動永磁電機起動的起動過程:先給定啟動電流Iq,坐標變換的角度信息是由控制器提供的強制角度,位置估算算法估算當前速度,拖動電機轉動;當速度低于起動限制轉速時,估算器采用強制角度;當電機速度大于起動的最小切換轉速,強拖結束,角度信息切入到由位置估算算法提供[16]。
3 對比實驗
根據上述兩種驅動控制方法,采用相同的逆變電路、相同的開關頻率10 kHz,對一款驅動軸流風扇負載,12 V、42 W、15 000 r/min的外轉子永磁電機,分別采用方波驅動和正弦波驅動,對兩種驅動方式的控制器效率、噪聲、電磁干擾進行對比實驗。
3.1 效率
風機類負載的功率與轉速成三次方關系,在起動階段負載功率幾乎為零,隨著轉速增加負載功率快速上升。永磁電機采用方波驅動或正弦波驅動,只要保證風機的轉速相同,則兩種驅動方式下控制器的輸出功率相同。從穩壓直流電源上讀取控制器的輸入功率,采用三表法測量控制器的輸出功率(功率分析儀實時測量三相繞組的相電流和相電壓[17],如圖11所示)。輸出功率與輸入功率的比值即控制器的效率。
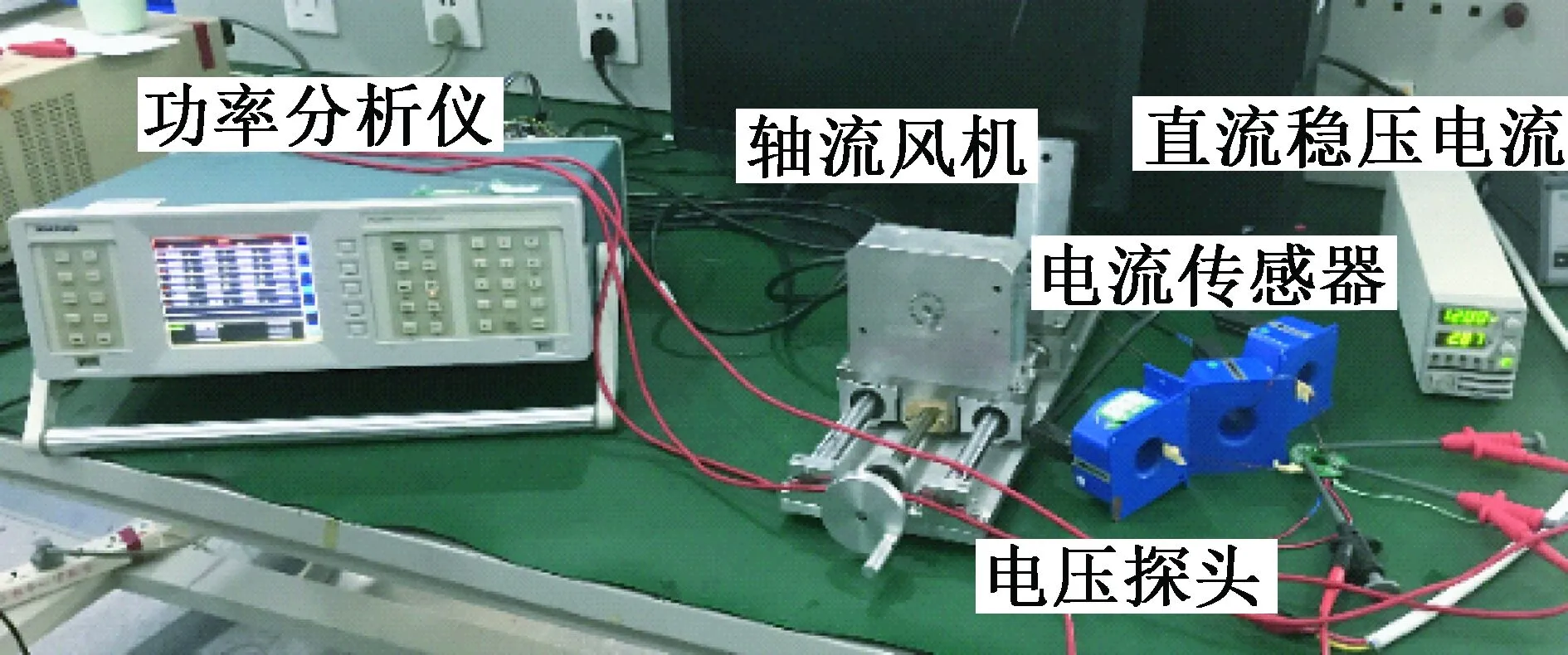
圖11 三表法測量功率
圖12顯示了永磁電機控制器在兩種驅動方式下的效率分布圖。兩種控制方式的控制器在額定功率點附近效率最高,最高效率幾乎相等,為82%;但是在輕載時,正弦波驅動控制器的效率略高。輕載時方波驅動控制器的電流畸變較大,高次諧波成分多,有功功率小。

圖12 控制器效率分布圖
3.2 額定轉速時噪聲
調整控制器,使風扇輸出額定轉速15000r/min,此時風機輸出額定功率,測試兩種驅動模式下的電流波形,如圖13所示。2個電流的有效值非常接近,但明顯可以看出,方波驅動的電流存在較大脈動。在噪聲實驗室測量兩種驅動方式下風機噪聲頻譜,如圖14所示。方波驅動風機的噪聲峰值比正弦波驅動高2dB,而且方波驅動的電流脈動也會帶來一些高頻轉矩脈動,會加速軸承磨損,縮短風機的使用壽命,風機的噪聲主要來自氣動噪聲和機械噪聲。
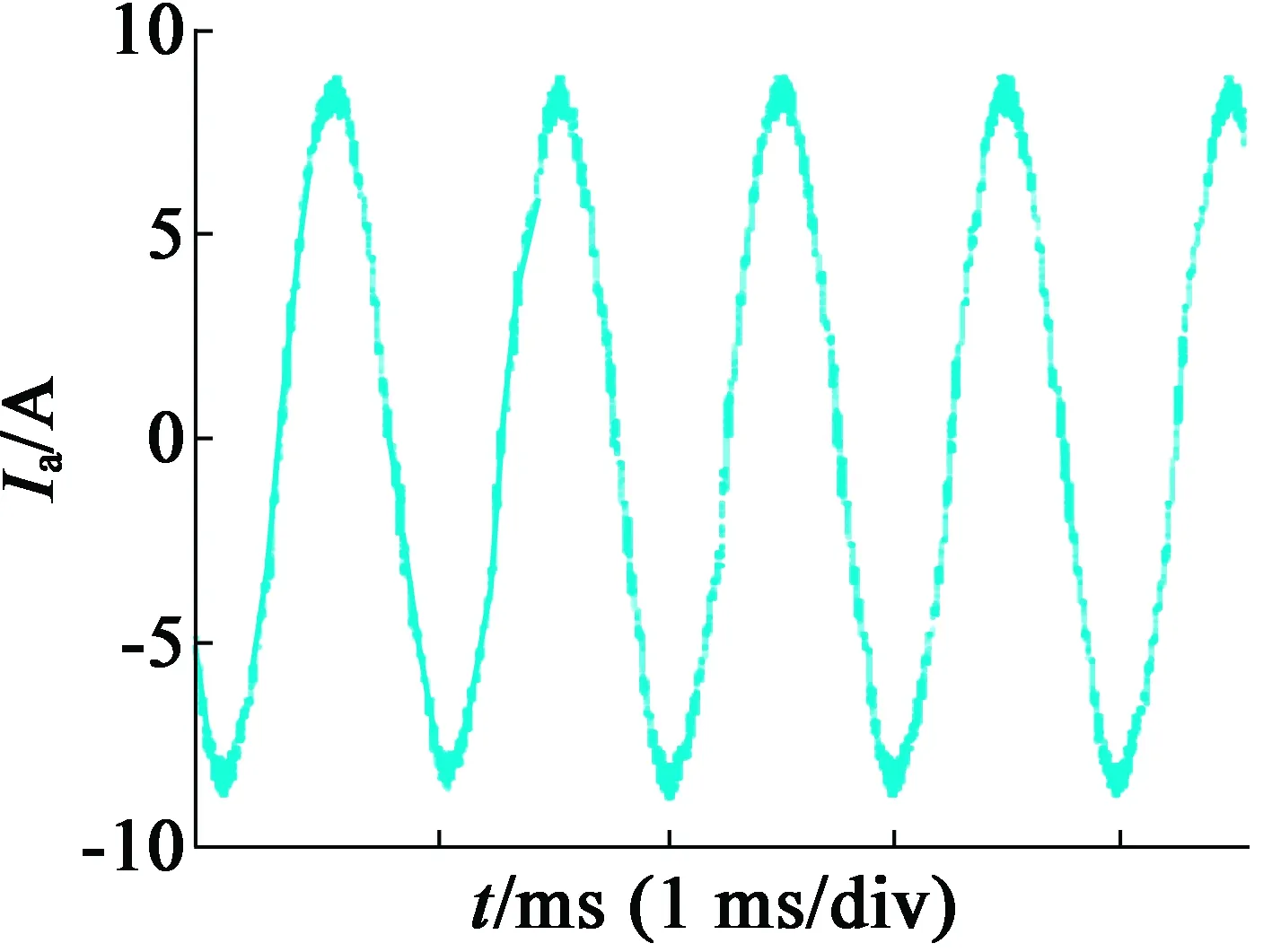
(a) 正弦波驅動
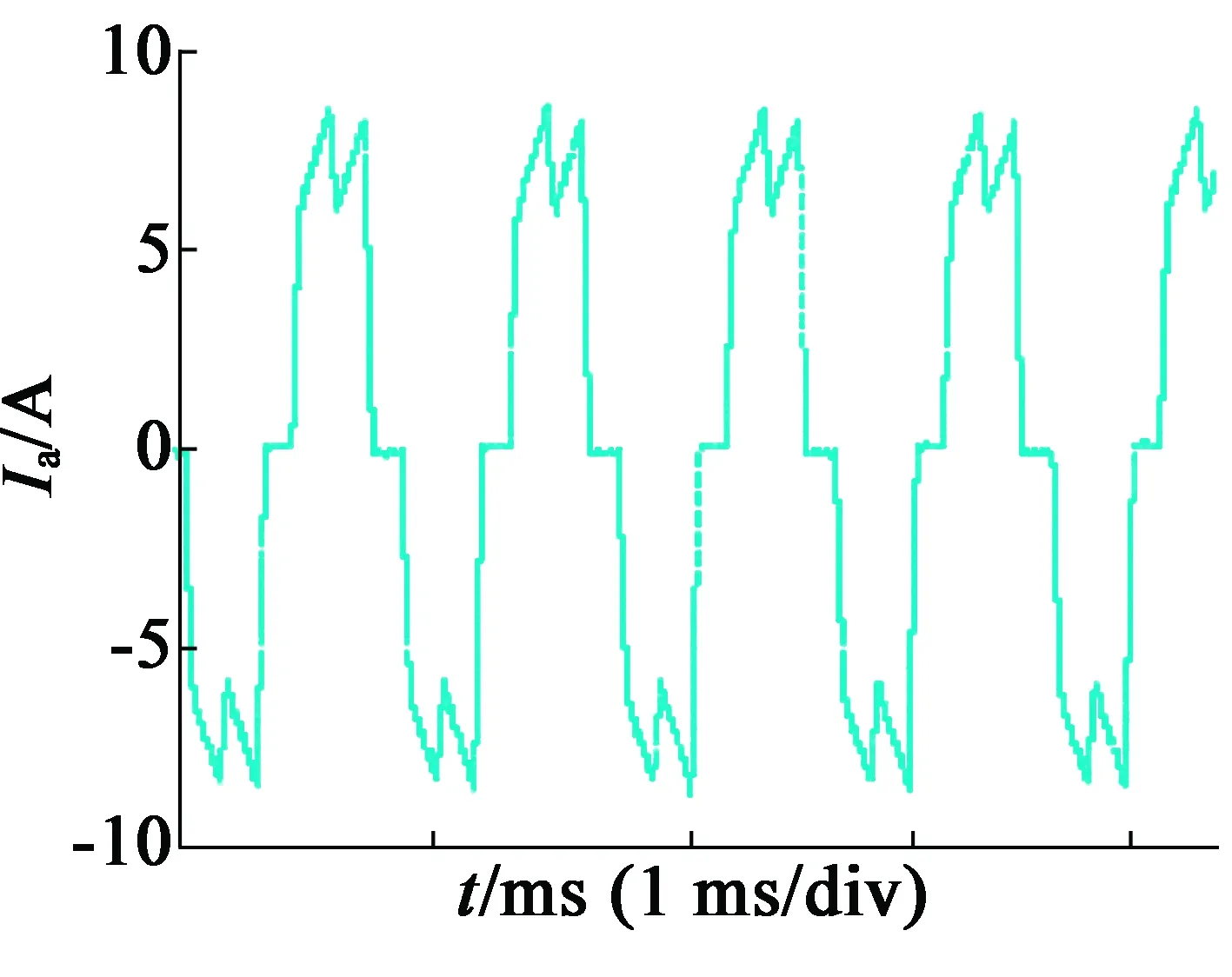
(b) 方波驅動
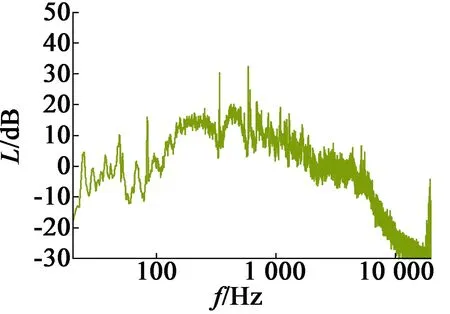
(a) 正弦波驅動
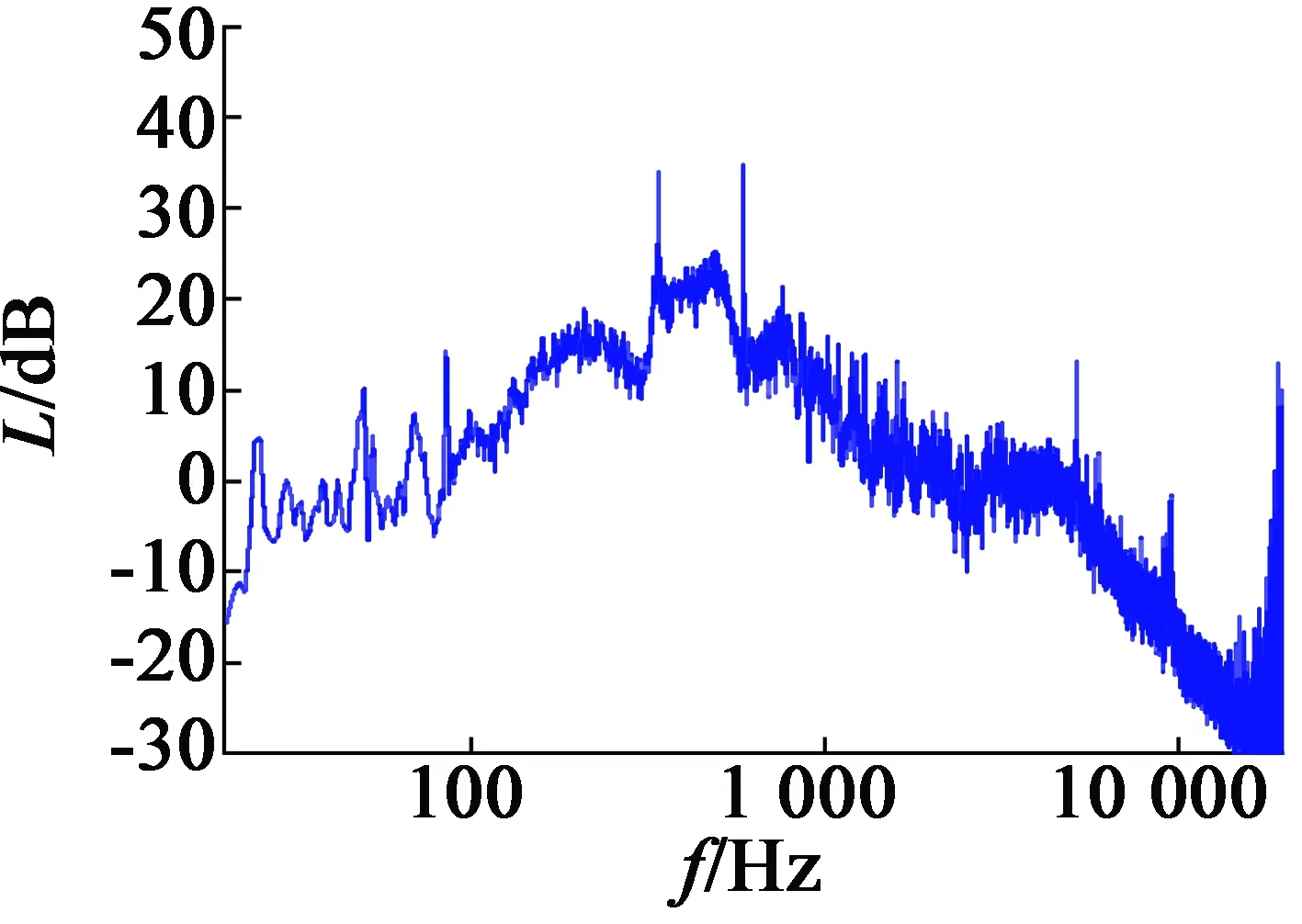
(b) 方波驅動
3.3 傳導電磁干擾
越來越多的行業對電子產品提出了電磁兼容指標,要求產品在規定的電磁環境中能夠保持正常工作、且不會對其它設備產生干擾影響。電磁兼容有電磁干擾EMI和電磁抗擾度EMS兩個方面的指標[18]。電子產品的電磁干擾包括傳導干擾和輻射干擾,通過機殼屏蔽、接地能夠較好地減弱電子產品對外部空間的輻射干擾,也能抵擋外部輻射干擾;增加母線濾波可以降低電子產品對電源的輻射干擾。相對來說,輻射干擾比較容易達標。

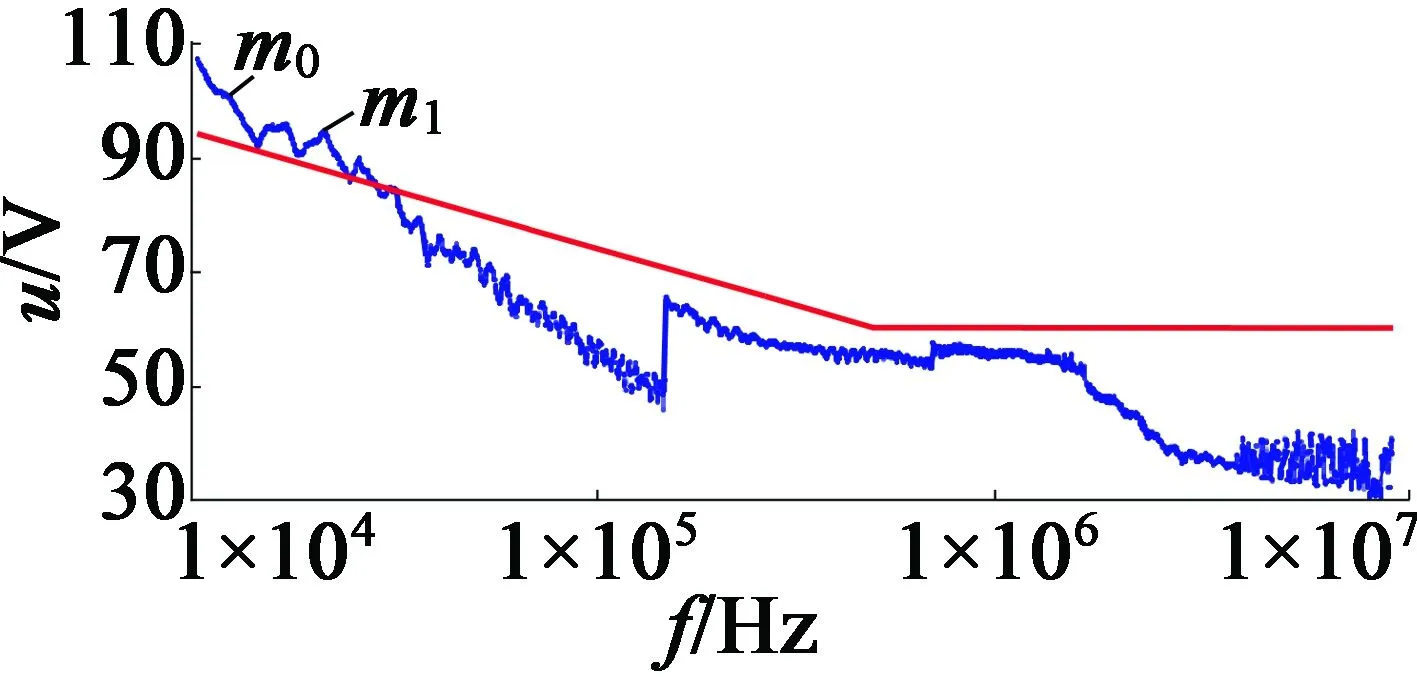
(a) 正弦波驅動

(b) 方波驅動
4 結 語
無位置傳感器控制技術是永磁電機的發展方向,采用方波驅動和正弦波驅動的永磁電機各有優勢,在使用時要根據成本和性能做出綜合考慮。本文通過一臺軸流風扇用外轉子永磁電機負載實驗對兩種驅動方式的特性進行對比,兩種控制方式下控制器額定工作點效率幾乎相等;方波驅動的電流存在換相脈動,驅動風機時噪聲峰值比正弦波驅動高2 dB,傳導干擾也較大;但正弦波波驅動的控制算法復雜,對控制芯片性能要求較高。
