內埋式永磁同步電機初始位置檢測方法的比較與改進
2020-12-07 06:47:22韓松杉周明磊游小杰王琛琛
鐵道學報 2020年11期
關鍵詞:方法
韓松杉,周明磊,游小杰,王琛琛
(1.內蒙古電力調度控制中心,內蒙古 呼和浩特 010020; 2.北京交通大學 電氣工程學院,北京 100044)
相較于異步電機,永磁同步電機(PMSM)具有體積小、效率和功率因數高、寬調速范圍等優點。隨著PMSM的控制和設計技術的提高,PMSM的應用場合也不斷擴展,已經被成功的應用于地鐵和高速動車組[1]。對于PMSM,轉子初始位置誤差可能會造成電機啟動失敗、控制性能變差等后果。目前無位置傳感器控制系統,電機啟動時需檢測轉子角度;而對于有位置傳感器的控制系統,位置傳感器安裝、更換后,傳感器測得的角度往往與轉子角度存在固定偏差,需要校正。因此,準確的估算初始位置,對于有、無位置傳感器的控制系統都具有重要意義。
目前國內外學者已經針對該問題開展了廣泛的研究,并發表大量文獻。總體上可以分為以下幾類:①預定位法[2];②電壓脈沖注入法[3-9];③高頻電壓注入法[9-17]。文獻[2]介紹了預定位法,該方法將靜止的電流矢量通入電機定子中,產生的轉矩將轉子定位到指定角度。安裝在列車上的牽引電機,在檢測過程中需要保證轉子靜止,防止列車發生移動,該方法顯然并不適用。其余兩類方法在檢測轉子位置時均不會造成轉子的轉動。注入電壓脈沖的方法主要有兩類,文獻[3-5]利用短時電壓脈沖及響應電流,從電機數學模型中求解出轉子角度,本文稱為直接計算法。文獻[6-9]利用電壓矢量脈沖越接近d軸,響應電流幅值越大的原理來逼近轉子位置,本文將其稱之為逐次逼近法。文獻[10-17]主要介紹了高頻旋轉、高頻脈振電壓注入法。該類方法向電機注入高頻電壓,其響應電流經過相應的信號處理算法之后,即可估算出轉子角度。相對于其他方法,高頻電壓注入法計算速度快,并可應用于低轉速下的無位置控制。
上述方法各有特點,本文以內埋式永磁同步電機(IPMSM)為研究對象,主要對廣泛使用的逐次逼近法和兩種高頻電壓注入法進行研究。考慮到軌道交通變流器開關頻率低、死區時間大的特點,分析了死區等非線性因素對估算精度的影響。除高頻脈振電壓注入法外,其余兩種方法受非線性因素影響大、估算精度低,與分析、實驗結果相符。在此基礎上,對誤差較大的方法提出了改進措施。最后對文中三種方法及其改進算法進行驗證、對比分析,證明了改進算法的有效性。
1 IPMSM數學模型
轉速為零時,IPMSM在α-β坐標系下的電壓方程為[1]
(1)
式中:uα、uβ、iα、iβ分別為定子電壓、電流在α-β坐標系下的分量;Rs為定子電阻;p為微分算子;Ld、Lq分別為d、q軸電感;L1=(Ld+Lq)/2,L2=(Ld-Lq)/2;θr為轉子角度。凸極機的轉子位置會影響電機電感,反之也可利用電機電感來求解轉子位置。由式(1)可知,定子電感僅與2θr相關,因此還需要利用電機的飽和特性來進一步區分θr和θr+π兩個角度(永磁體N極、S極)。
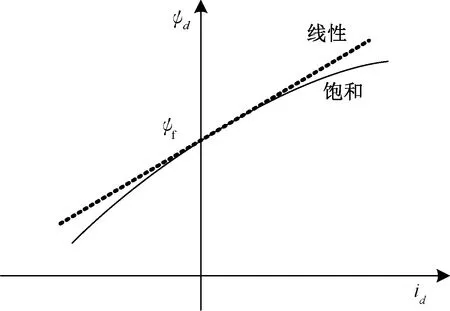
圖1 同步坐標系下IPMSM飽和特性曲線
圖1中展示了d軸磁鏈與電流的關系,id、ψd分別是電機d軸電流與磁鏈;ψf為永磁體磁鏈[10]。當電流產生的磁鏈與ψf同向時,電流的增大會加劇定子鐵芯的飽和,使得Ld變小。可利用這一特性來檢測轉子的極性。
2 逐次逼近法及其改進措施
向電機注入等寬電壓脈沖檢測初始位置的方法主要有兩類:直接計算法和逐次逼近法。直接計算法利用電壓電流反解電感矩陣,受采樣精度、飽和效應影響較大,所以本文主要對逐次逼近法進行研究。
2.1 基本原理
向IPMSM注入等幅電壓脈沖,電感和轉子位置的關系反應在電流幅值中,電流幅值最大的脈沖,其角度離θr最近。即使對于隱極機,飽和效應同樣會導致d、q軸電感的差異,利用這一特性也可計算得到轉子角度。因此,該方法也可應用于隱極機的轉子初始角檢測[6]。在α-β坐標系下,向電機注入幅值為U,角度為δ的電壓矢量,其在α-β坐標系下的分量uα、uβ為
(2)
將公式(2)代入式(1),考慮到注入電壓脈沖的持續時間很短,是一個高頻分量,因此可忽略定子電阻壓降。不計飽和效應時,響應電流峰值Im的表達式為
(3)
當δ=θr或θr+π時,響應電流峰值最大
(4)
當δ=θr+π/2或θr+3π/2時,響應電流幅值最小
(5)
考慮到定子電感的飽和,角度為θr的電壓矢量的響應電流幅值最大。依據這一原理可確定轉子位置。在公式(4)的基礎上,結合電機額定電流可確定注入電壓矢量的幅值和持續時間。
實驗中,θr=90.5°時等幅值電壓脈沖響應電流隨電壓角度的變化曲線見圖2。當電壓脈沖角度等于θr時,電流取到最大值。確定轉子大致角度后,可在其周圍以更小的角度間隔發電壓脈沖,來獲取更精確的轉子角度。
注入的電壓脈沖,會在定子鐵芯中留有剩磁,逐漸累加后,會影響觀測精度。為了減小剩磁的影響,注入電機的脈沖盡量與前一個脈沖角度相差180°,可依次為0°、180°、10°、190°、…此外,該方法的精度還取決于以下兩個因素:
(1)逆變器非線性因素。受到死區、開關管導通壓降等因素的影響,作用于電機的電壓脈沖并不完全與指令值相同。且注入電壓、響應電流均為脈沖形式,難以補償。
(2)電流采樣精度。AD采樣的分辨率直接限制了角度估算的分辨率,而非電壓脈沖的角度間隔。
本文提出一種降低上述因素影響的方法:在同一角度,注入兩個幅值不同的電壓脈沖,將響應電流作差,用于逼近轉子位置可抵消非理想因素的影響。
2.2 改進措施


圖3 電壓矢量示意圖
結合圖3,將V1、V2相減,得到的差向量ΔV方向與指令電壓相同。結合公式(1),忽略定子電阻后,電機可看作線性系統。由疊加原理可知,ΔV的響應電流ΔI等效于V1、V2響應電流I1、I2之差。用ΔI來估算轉子位置,即可抵消上述因素影響。在α-β坐標系下,V1、V2可表示為
(6)
式中:u1α、u1β,u2α、u2β分別為V1、V2在α-β軸的分量。忽略定子電阻,ΔV的等效響應電流為
(7)
式中:i1α、i1β和i2α、i2β分別為I1、I2在α-β坐標系下的分量;L11、L12、L21、L22為電感矩陣相應元素;Δiα、Δiβ為電流矢量差ΔI的兩個分量。
改進后的逐次逼近法,在每個角度注入兩個不同幅值的電壓矢量,通過比較其電流矢差的幅值,即可準確確定轉子位置。該方法可減小逆變器非線性因素的影響,提高計算精度。
3 高頻電壓注入法
高頻注入法是一類適用于低速的無位置傳感器算法,也可以應用于初始位置檢測。依照注入電壓信號的形式,可以分為高頻旋轉電壓注入法和高頻脈振電壓注入法。
3.1 高頻旋轉電壓注入法及改進措施3.1.1 基本原理
向定子注入幅值為Vinj,角頻率為ωc的高頻旋轉電壓Vinj·ejωct,通過復矢量形式的電壓方程求解得[11]響應電流為
(8)

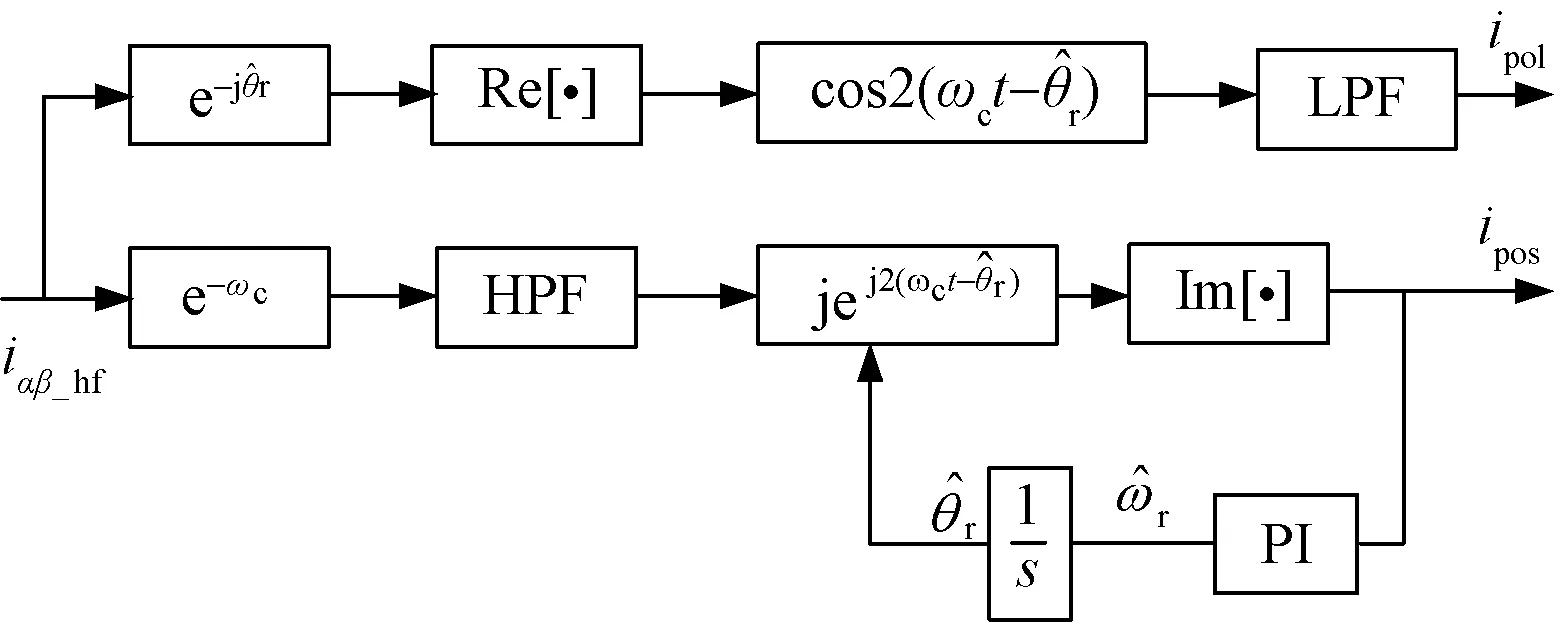
圖4 高頻旋轉電壓注入法信號處理流程
依據圖4中算法,將采樣得到的高頻響應電流提取出用于鎖相的電流ipos
(9)
(10)

用實際電壓uαβ_hf計算得到電流為

(11)
(12)
3.1.2 改進的高頻旋轉電壓注入法
本文提出一種補償策略,可以對各種非理想因素導致的電壓相位的誤差進行整體的補償,具體原理見圖5。
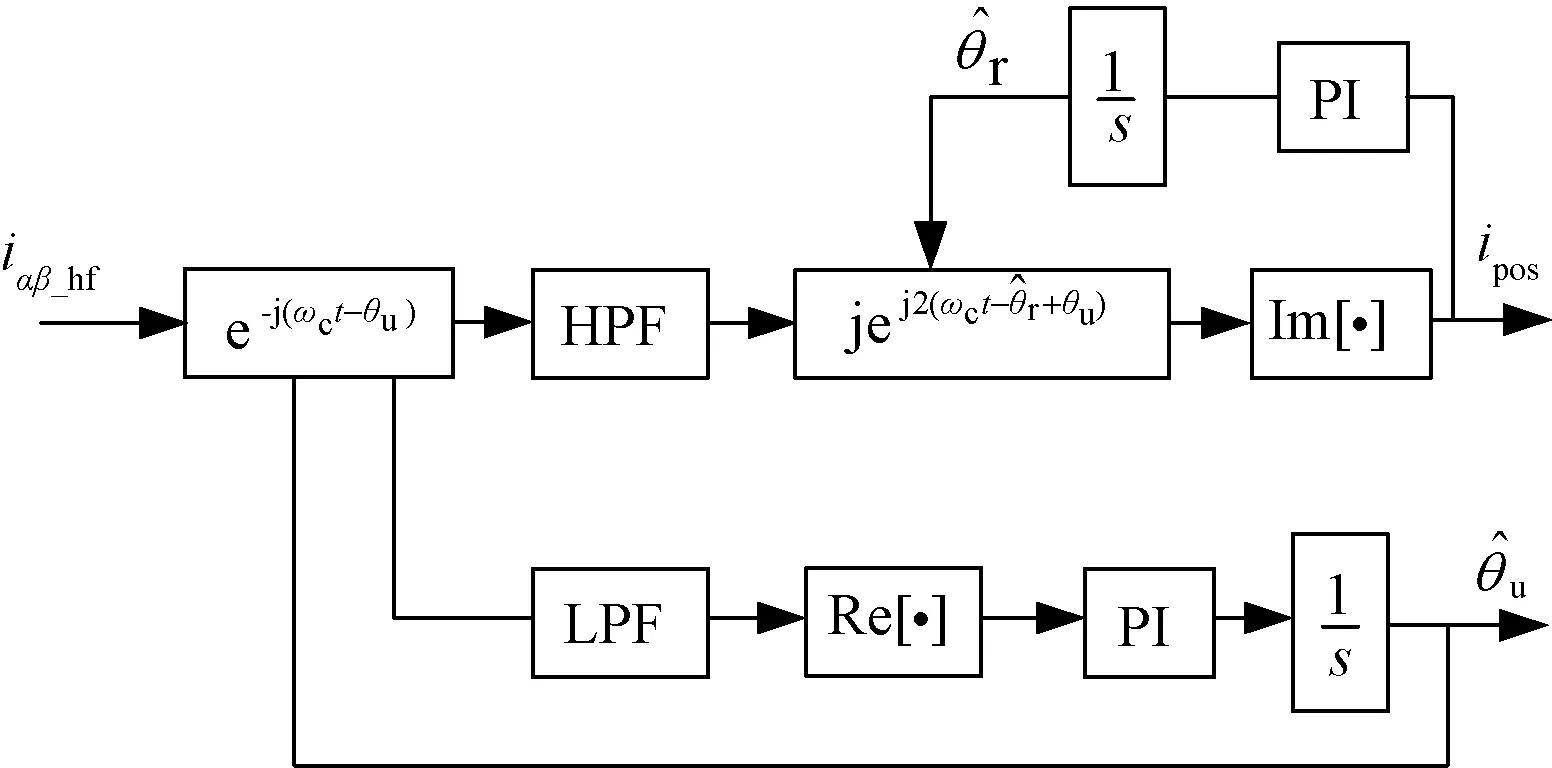
圖5 電壓相角補償算法
估算轉子角度時,需要用到高頻電壓的相位ωct。理想情況下,高頻電壓指令值的相位就等于實際值,同時也等于正序電流的相位。考慮到非線性因素,指令電壓相位不再等于實際電壓相位。此時,正序電流相位仍與電壓實際值相位相同,可以通過正序電流來間接的獲取電壓相位,校正計算結果。
假設電壓指令值的相位與正序分量相位的角度差為θu,將高頻電流旋轉至正序分量的同步旋轉坐標系下,正序分量為直流量,負序分量為變為2倍頻率的交流量。通過低通濾波器可得到正序電流ip
(13)

(14)
當鎖相環穩定后,ωct+θu即為正序電流的相位,也是電壓實際值的相位。用ωct+θu代替電壓指令值的相位ωct,即可實現對電壓相位誤差準確補償。從而提高避免了死區、計算和控制延時等因素對估算結果的影響。
3.2 高頻脈振電壓注入法
(15)
式(15)為靜止坐標系下的響應電流,最后一項是飽和分量,可以用來判別轉子極性。在位置計算時,飽和分量幅值較小,可以忽略。信號處理算法見圖6。
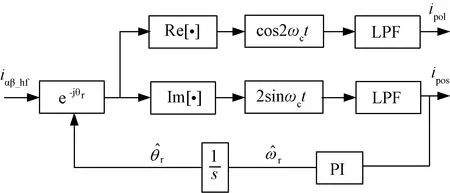
圖6 高頻脈振電壓注入法信號處理流程
采樣得到的高頻電流經過圖6中所示算法,得到用于鎖相的電流分量
(16)
高頻脈振電壓注入法可能存在著與高頻旋轉電壓注入法相同的問題。由于延時、死區時間等因素的影響,電壓的幅值、相位會發生變化。在某一個估算的轉子角度下,非線性因素對實際輸出電壓的影響體現在幅值、相位兩方面。這里假設注入電壓的實際值uαβ_hf為
(17)


(18)
用于鎖相的電流分量也隨之改變
(19)

據此可以得到結論,死區時間等非線性因素幾乎不會影響高頻脈振電壓注入法的計算結果,這也是該方法的優勢。
4 實驗結果
利用實驗室的3.3 kW IPMSM實驗平臺,對本文中分析的三種轉子初始位置估算方法進行了相應的實驗,以便于綜合比較,電機參數見表1。
實驗中控制器采用DSP芯片TMS320F28335作為控制核心,逆變器開關頻率為750 Hz,死區時間15 μs,直流母線電壓540 V。
圖7中電壓、電流波形展示了逐次逼近法的兩個階段:先每隔10°發一組電壓脈沖,找出最接近轉子的角度;再在其周圍采用2.2節中的改進算法,以更小的角度間隔逼近轉子位置,其波形見圖7(b)。
圖8為逐次逼近法改進前后的實驗結果,改進前注入的電壓幅值為50 V,持續2個開關周期。改進后注入的電壓脈沖分別為50 V、2個開關周期和50 V、1個開關周期(可等效為25 V、2個開關周期的電壓脈沖)。
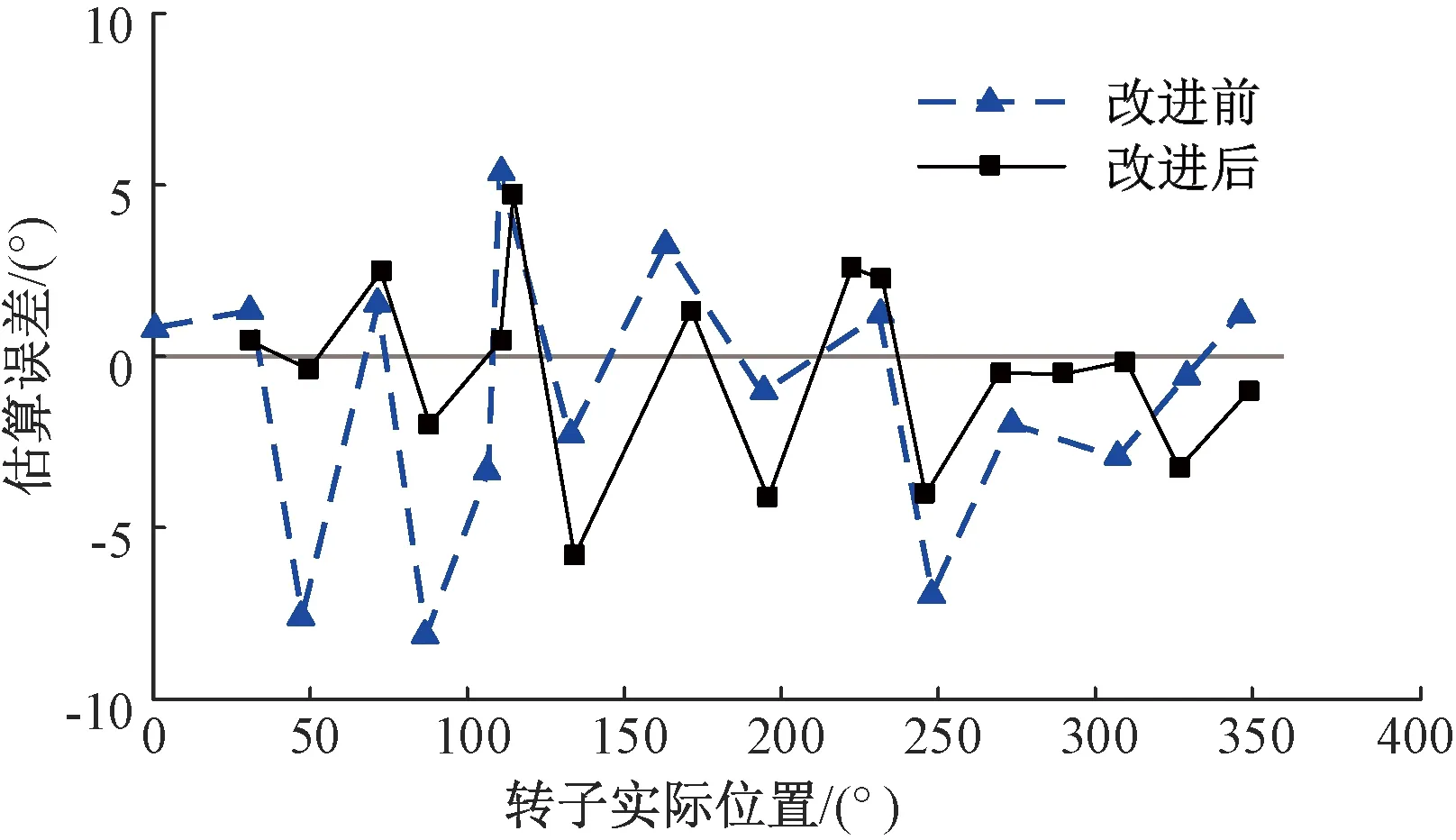
圖8 逐次逼近法估算結果
改進前的逐次逼近法最大估算誤差接近9°;改進后誤差在±5°以內,明顯減小,證明了改進算法的有效性。
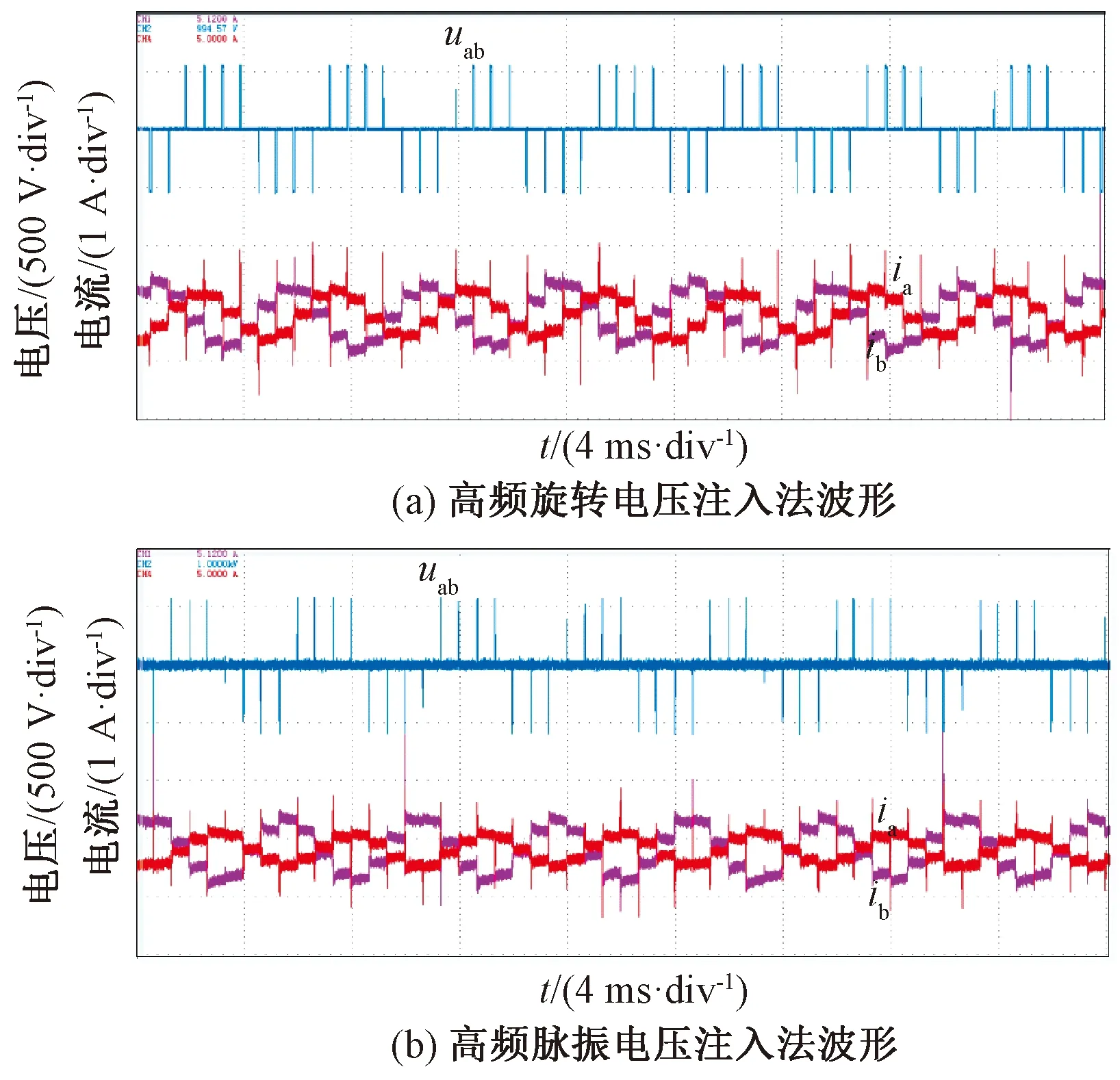
圖9 高頻電壓注入法實驗波形
圖9為兩種高頻電壓注入法的實驗波形,實驗中注入的高頻電壓幅值均為30 V,頻率也同為200 Hz。

圖10 高頻旋轉電壓注入法估算結果
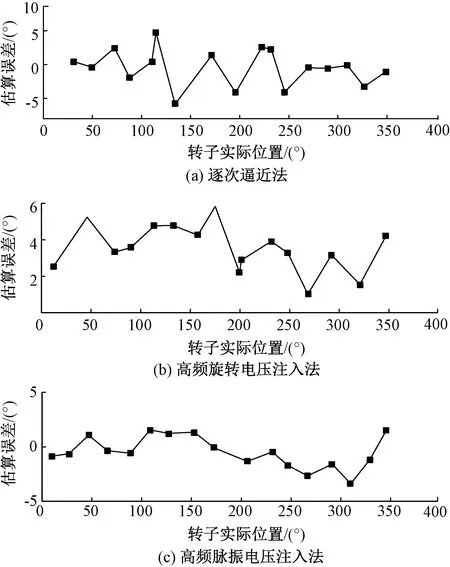
圖11 四種方法估算結果
圖10中高頻旋轉電壓注入法改進前最大誤差角度為14°,并且計算結果存在較大偏置,與上文中分析相吻合;改進后誤差減小到6°以內,角度偏置有了明顯的減小,證明了改進算法的有效性。
為了便于對比,圖11中分別展示了文中三種檢測算法的實驗結果。其中高頻脈振電壓注入法受非理想因素影響較小,精度也最高。改進后的逐次逼近法非理想因素得到一定的補償,計算精度接近高頻脈振電壓注入法。改進后的高頻電壓注入法估算估算誤差大于前兩種方法。
5 結論
本文通過對實際應用較多的幾種IPMSM初始位置檢測方法分析、改進和實驗驗證,得到以下結論:
(1)逐次逼近法的估算精度會受到死區等非理想因素的影響,采用本文中的改進方法可明顯提高其精度。該方法實現簡單,并可應用于隱極機。但是需要依次注入多個電壓脈沖,估算時間較長。
(2)兩種高頻電壓注入法檢測速度較快,其中高頻脈振電壓注入法受非線性因數影響最小,產生的轉矩脈動小,精度也最高;高頻旋轉電壓注入法改進前受非理想因素影響導致觀測誤差偏大,改進后誤差明顯減小。這兩種方法均需調節濾波器、鎖相環參數,實現難度較大。
(3)高頻注入法可擴展至低速運行電機的位置檢測,而逐次逼近法只能在電機靜止時檢測初始位置。
總體而言,改進后的逐次逼近法和脈振電壓注入法相對更優。以上幾種方法產生的轉矩很小,在空載時也不會造成電機的轉動。在實際應用中可以根據具體應用場合和指標要求選擇最合適的方法。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
