基于AHP分析法的磁浮系統車軌耦合振動抑制方法
2020-12-07 06:55:44汪科任羅世輝陳曉昊馬衛華鄒瑞明
鐵道學報 2020年11期
汪科任,羅世輝,陳曉昊,馬衛華,鄒瑞明
(西南交通大學 牽引動力國家重點實驗室,四川 成都 610031)
磁浮列車不同于有軌列車,是一種新型的軌道交通運行方式,具有運行平穩、乘坐舒適和無軌道接觸等優點,具有較好的市場運用前景[1]。EMS型磁浮列車依靠電磁懸浮力實現穩定懸浮,懸浮力將懸浮間隙與懸浮電流耦合在一起[2]。由于懸浮電磁力同時作用在磁浮列車與軌道梁上,若懸浮控制器性能稍差,極易出現車軌耦合振動。美國AMT磁浮列車就曾出現過在剛度較強的水泥梁上能夠實現穩定懸浮,而在剛度較低的橋梁上卻失穩的現象[3]。針對該問題大量學者進行了相關研究,結果表明:剛度較低的彈性軌道梁是導致系統懸浮失穩的主要原因。為了防止懸浮系統在彈性軌道梁上懸浮失穩,工程應用中常常通過增加軌道梁剛度與質量來抑制車軌耦合振動,但從經濟性的角度來考慮,增加軌道梁剛度與質量將導致軌道梁建設成本的大幅增加。現階段在磁浮列車的整個造價中,軌道梁的建設成本高達60%~80%[4]。所以設計出性能更好的懸浮控制器來抑制懸浮系統在柔性軌道梁上的耦合振動,促進磁浮列車更好的商業化發展是非常必要的[5]。
車軌耦合振動常常發生在磁浮列車靜懸浮或以較低速度通過彈性橋梁時,為抑制這種車軌耦合振動,國內外學者進行了大量的相關研究[6-16]。其大致可以分為以下2種:一種是從控制算法的角度對懸浮控制器進行優化設計,研究者認為懸浮控制器本身的特性是導致磁浮系統在彈性橋梁上失穩的主要原因;另一種是采用某種特定的算法對磁浮列車本身的系統結構進行優化設計,從而提高磁浮系統的動力學特性。文獻[6]利用Simulink軟件建立了HSST型五懸浮架磁浮列車垂向動力學模型,對比分析了不同懸浮控制算法對磁浮系統懸浮穩定性的影響,并指出不同的懸浮控制算法將對懸浮系統的穩定性產生不同的影響。文獻[7-8]以單鐵懸浮系統為研究對象,采用雙環PID控制算法,從能量轉換的角度解釋了系統發生車軌耦合的原因。文獻[9]利用狀態觀測器對懸浮電磁鐵的速度進行了準確估計,通過動力學仿真得出:當懸浮控制器頻率與軌道梁主頻率接近時,懸浮系統將發生車軌耦合振動現象。文獻[10]以單鐵懸浮系統為研究對象,指出在一定程度上提高懸浮控制器的電氣懸浮剛度可在一定程度上抑制系統的車軌耦合振動。文獻[11-13]各自采用不同的控制算法,分別研究了車輛運行速度、軌道梁長度和軌道梁抗彎剛度等對磁浮列車動態響應特性的影響,從而優化了磁浮系統的動力學特性。文獻[14]指出:采用越多的狀態反饋,系統具有更優的動力學特性。文獻[15]以單鐵懸浮系統為研究對象,將車體對懸浮電磁鐵的作用力視為額定的外界擾動,采用卡爾曼濾波實現了系統在彈性軌道梁上的穩定懸浮。文獻[16]在文獻[15]的基礎上考慮了車體的振動,采用魯棒控制器實現了系統在柔性梁上的穩定懸浮。然而,通過以上文獻分析可知,在懸浮控制器設計過程中,鮮有文獻對二次型加權矩陣權重系數的選取以及不同控制算法對磁浮系統車軌耦合振動的影響進行很好的機理說明。文獻[17]通過對單懸浮架模型與單鐵模型的仿真對比得出,對磁浮系統車軌耦合振動機理的探究,單鐵系統是適用的。因此本文以彈性軌道梁-懸浮電磁鐵-車體垂向耦合振動模型為研究對象,采用AHP法(層次分析法)程序化的求取了控制器二次型性能指標中狀態加權矩陣的權重系數,并以此為基礎分析了控制器1與控制器2對磁浮系統懸浮穩定性的影響。將采用軌道梁、懸浮電磁鐵以及車體的振動狀態進行主動控制的反饋控制器定義為反饋控制器1,將僅對懸浮電磁鐵振動狀態進行主動控制的傳統控制方式構成的反饋控制器定義為控制器2,如文獻[10,18-20]等采用的控制器。
針對磁浮系統中二次型性能指標中狀態加權矩陣選取困難的問題,采用AHP法來程序化的求取該值,在此基礎上利用二次最優控制理論設計出2種不同的狀態反饋控制器,在一定程度上從能量激振的角度分析了2種不同狀態反饋方式對懸浮系統車軌耦合振動響應特性的影響。
1 車軌耦合等效模型
針對西南交通大學常州軌道交通研究院某等效單鐵懸浮系統(見圖1),取向下為系統正方向,根據牛頓第二定律可得軌道梁、懸浮電磁鐵和車體在額定懸浮位置處的動力學方程為
(1)
(2)
(3)
F=-Ps(x2-x1)+PiIM
(4)
根據Meisinger推導可得到系統電學方程為[2]
(5)
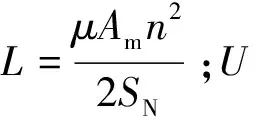
圖1 簡化的單鐵-軌道梁-車體模型
懸浮電磁鐵線圈兩端電壓與電流的數學表達式為
(6)
(7)
由式(6)、式(7)可得
(8)
將式(8)在額定位置處Taylor展開,得
(9)
式中:Um為實際加載在懸浮電磁鐵線圈兩端的電壓;φ為流過懸浮電磁鐵極面積的磁通量;Lm為電磁鐵瞬時電感;cm為實際懸浮間隙;UN為平衡位置處電磁鐵線圈兩端的電壓;c為相對額定懸浮位置氣隙的變化量。
(10)
(11)
由于c=x2-x1,由式(10)、式(11)可得式(5)。

(12)

其中,
2 狀態反饋控制器設計
2.1 狀態反饋增益矩陣K的求取
磁浮列車在運行過程中常常出現懸浮控制器性能惡化現象,尤其在溫度較高的夏季特別突出。根據相關分析,其主要是由懸浮控制器發熱量較大引起的。所以在確保懸浮系統具有較好的動態響應特性的同時,如何限制懸浮控制器的發熱量是非常必要的。幸運的是該問題可以通過線性二次最優控制理論來處理,通過該理論設計出的控制器能夠實現系統控制能量與系統動態特性之間的平衡。定義被控系統(式12)二次型性能指標J為
(13)

PA+ATP-PBRu-1BTP+Q=0
(14)
式中:矩陣P為正定對稱矩陣。狀態反饋增益矩陣K為
K=Ru-1BTP
(15)
2.2 狀態加權矩陣Q的求取
式(13)中,與控制輸入矩陣Ru相比,狀態加權矩陣Q的維數較高,導致其加權系數的選取通常比較困難,一般都是通過經驗試湊,并沒有統一的方法。本文采用AHP法來程序化的解決狀態加權矩陣Q求取困難的問題。AHP法是一種科學計算各元素權重系數的方法,是在對復雜決策問題的本質、影響因素及其內在關系等進行深入分析的基礎上將問題劃分為目標層、準則層和方案層,同時對各層次的元素進行兩兩比較而最終確定各元素加權系數的一種數學分析方法,能有效地應用于難以用定量分析解決權重系數取值的研究課題[21]。其設計步驟為[22]
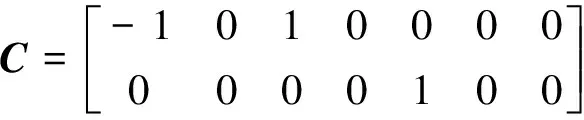
Step1建立控制指標的層次結構。選取系統二次型性能指標即式(13)作為目標層;反饋的狀態變量作為準則層;以滿足總體合理的一致性檢驗準則作為方案層。
Step2構造線性系統判斷矩陣,用于確定兩兩元素的重要性比較。在判斷矩陣的構造中主觀加權比例系數的確定是關鍵,令Hij(無單位)為指標i與j重要性的比較值,其遵循以下準則:
(1)2個元素兩兩比較,若同等重要用標度1表示;稍重要用標度3表示;明顯重要用標度5表示;強烈重要用標度7表示;極端重要用標度9表示。
(2)若2個指標的相對重要性位于2個比較值之間,則取值分別為2、4、6、8。
Step3計算每一層的權重并進行權重一致性的檢驗。若一致性比例系數ηR小于0.1,則認為系統通過一致性檢驗;否則需要重新規劃各狀態量之間的合理權重,直到其通過一致性檢驗為止。
令判斷矩陣H(判斷矩陣反映了設計者對各加權系數權重的分配)最大特征值相應的特征向量為WH,由于列車在實現穩定懸浮后,乘坐舒適性是列車運行品質中一個極其重要的指標,所以相對于其余狀態變量的權重系數,與車體振動相關狀態變量的權重系數應相對較大。由于反饋控制器1將系統的所有狀態變量都進行了主動控制,其涉及的狀態反饋量最多,設計也最為復雜,所以本文首先對反饋控制器1進行求解。
根據以上步驟可構造判斷矩陣H為
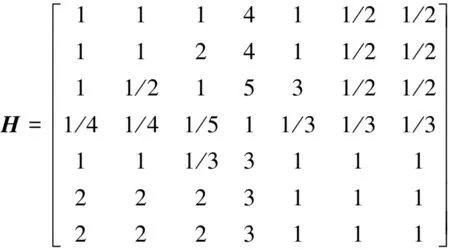
對判斷矩陣H每一列歸一化后求行和再進行列歸一化處理后可得判斷矩陣H最大特征值對應的特征向量WH,為
WH=[0.124 00.140 80.155 30.043 90.136 2
0.199 9 0.199 9]T
(16)

根據式(17)可求取矩陣WH最大特征值λmax為7.488 1。根據式(18)求得一致性指標CI為0.081 35。其中n1為判斷矩陣H的維數。由于判斷矩陣H為7維矩陣,可知隨機一致性指標RI為1.32[22],帶入式(19)可得一致性比率CR為0.062,其值小于0.1,可得判斷矩陣的不一致性程度在允許的范圍內,即通過一致性檢驗,則根據矩陣WH所確定的懸浮系統的二次型性能指標的權重系數是合理的,可用于式(13)中加權矩陣Q值得確定。
(17)
(18)
(19)
(20)
由式(20)可知,求取控制器2時,式(13)中狀態加權矩陣的值有:Q2=diag(0.155 3,0.043 9,0.136 2),最后結合式(14)和式(15)可求取控制器2為:u2=-K2X2。同理,由式(16)可知,求取控制器1時,式(13)中狀態加權矩陣的值有:Q1=diag(0.124 0,0.140 8,0.155 3,0.043 9,0.136 2,0.199 9,0.199 9),最后結合式(14)和式(15)可求取控制器1為:u1=-K1X1。系統結構間見圖2。
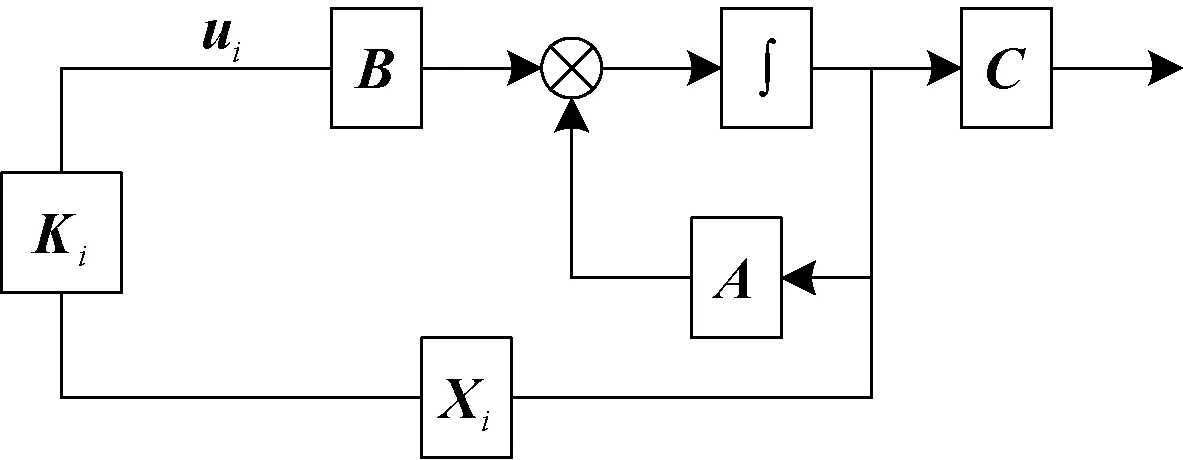
圖2 系統結構圖
3 動力學仿真分析
3.1 系統閉環特征根分析
考查閉環系統穩定性有多種方法,如李亞普羅夫穩定性判據、勞斯判據等,而通過驗證閉環系統矩陣特征根實部是否均為負數最直觀,所以本文選取該方法來定性判斷狀態反饋控制器1、2對系統懸浮穩定性的影響。耦合系統相關參數見表1。若文中無特殊說明均選取軌道梁跨中位置,即x1=l/2作為靜態懸浮位置。
基于AHP分析法,在反饋控制器1與反饋控制器2控制下閉環系統矩陣A特征根實部最大值變化規律,見圖3。由圖3可以看出,當軌道梁阻尼一定時,采用控制器1的反饋控制方式,當軌道梁剛度從500 ~1 500 kN/m遞增的過程中,系統矩陣A特征根實部最大值均為負值,系統是穩定的。而采用控制器2的反饋控制方式系統矩陣A特征根實部最大值均為正值,系統是不穩定的。但進一步分析發現,采用反饋控制器2的控制方式,隨著軌道梁剛度的增加,系統特征根實部的最大值是逐漸減小的,所以工程施工中通常采用大幅增加軌道梁剛度和阻尼的措施來抑制車軌耦合振動,但這將在一定程度上增加建設成本[15]。
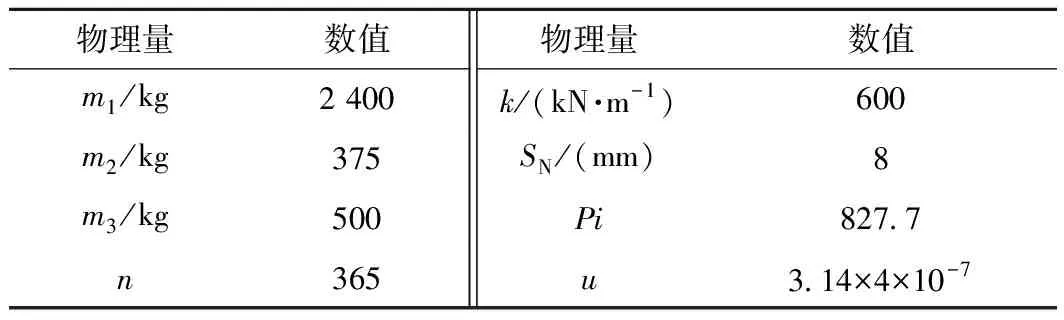
表1 系統參數
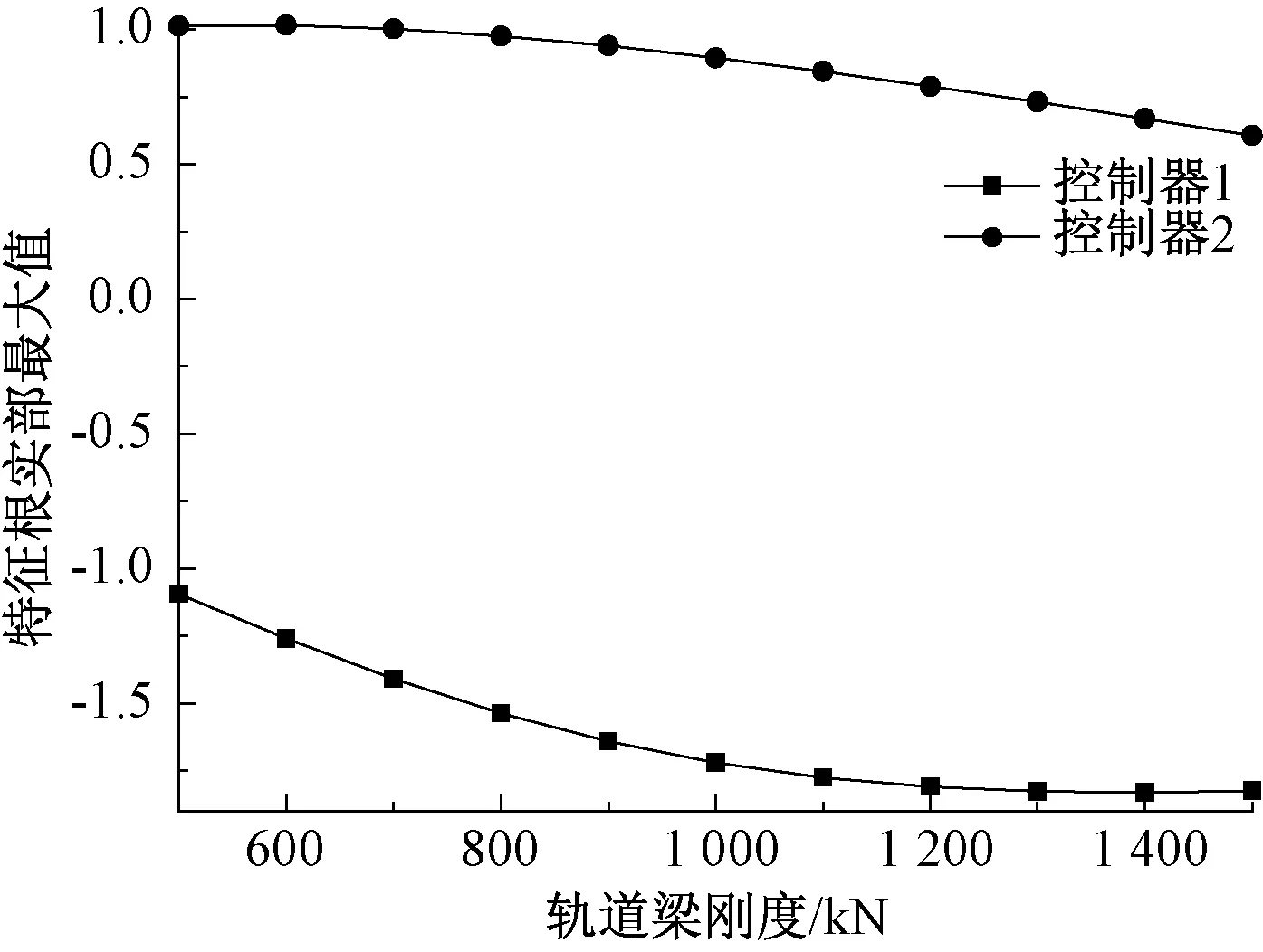
圖3 特征根實部最大值
3.2 數值仿真分析
3.1節分析中對2種不同狀態反饋方式進行了相應的定性分析,得出當軌道梁阻尼一定時,反饋控制器2不能使系統在較低軌道梁剛度下(如600 kN/m)實現穩定懸浮,而控制器1能夠實現懸浮系統的穩定懸浮。所以這節將定量分析采用AHP法時控制器1在軌道梁剛度為600 kN/m時懸浮間隙、軌道梁位移,懸浮電磁鐵位移與車體振動加速度的動態響應特性,分別見圖4~圖7。假設懸浮電磁鐵初始位置距離軌道梁2 mm。根據式(14)~式(16)、式(20)可得控制器1與控制器2反饋增益矩陣K1、K2為
(21)
(22)
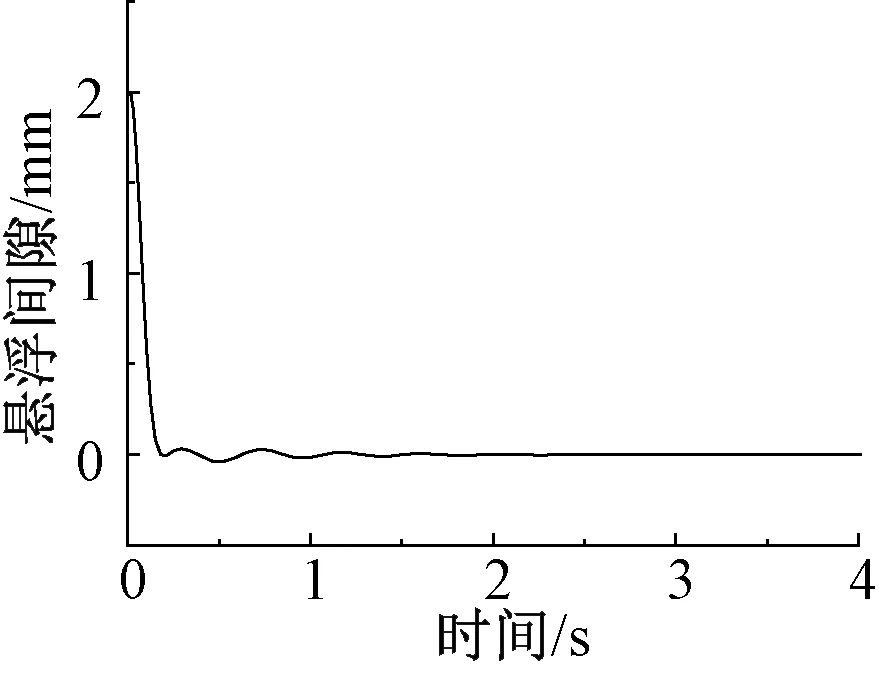
圖4 懸浮間隙
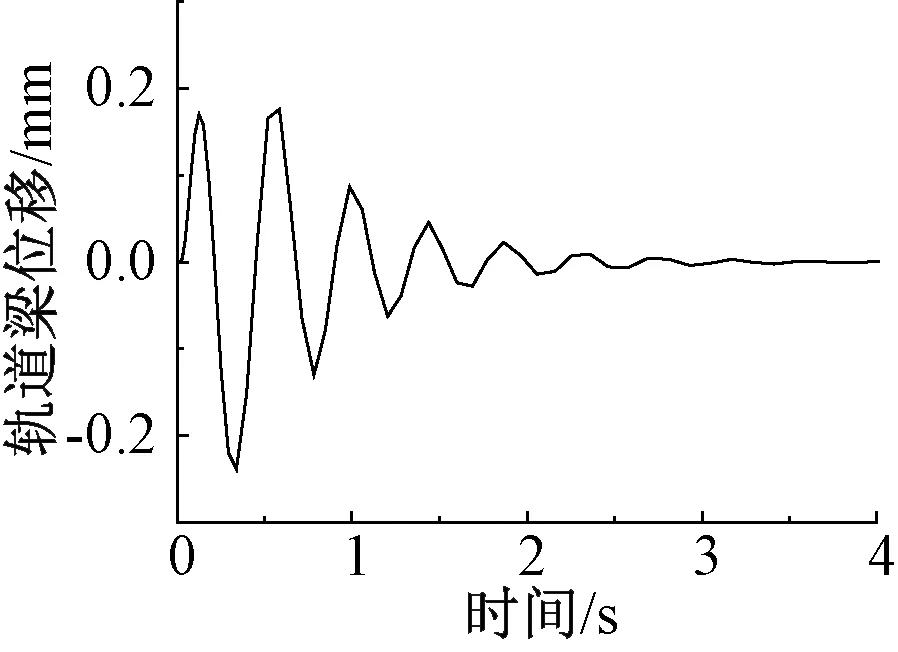
圖5 軌道梁位移
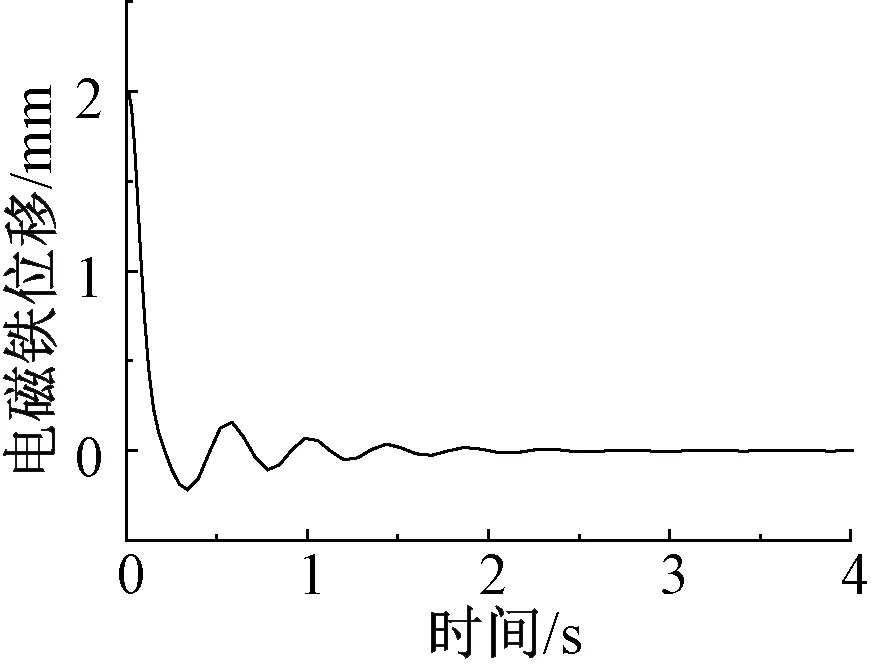
圖6 電磁鐵位移
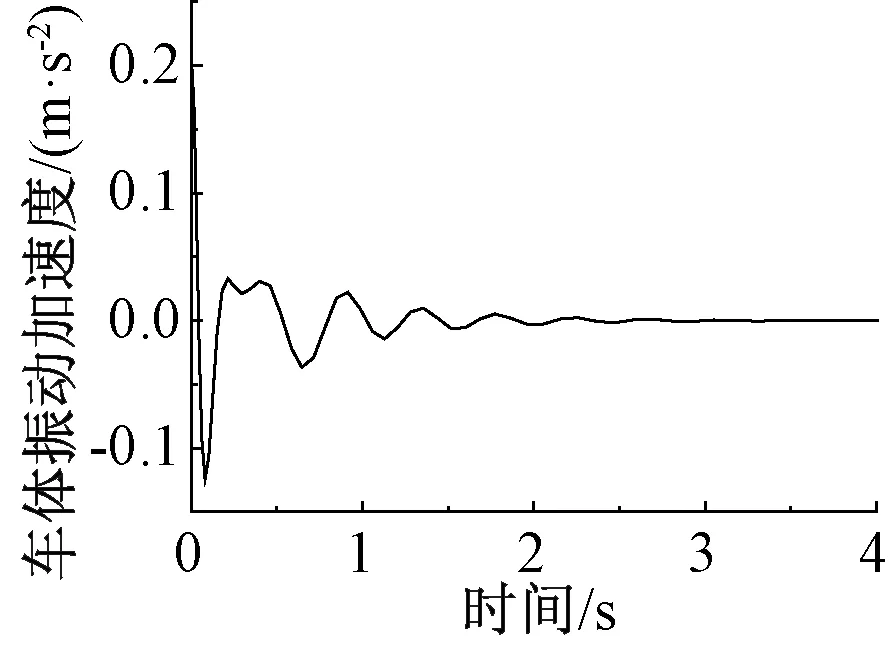
圖7 車體加速度
由圖4~圖7分析可知,對軌道梁、懸浮電磁鐵以及車體的振動狀態進行控制,將其振動狀態引入狀態反饋控制器的控制方式,基于AHP分析法能夠實現懸浮系統在較低軌道梁剛度下的穩定懸浮,僅需約0.5 s便能實現系統的穩定懸浮,車體最大振動加速度僅0.18 m/s2。
3.3 能量激振分析
本節將利用文獻[7]的方法,在一定程度上從懸浮系統對軌道梁能量輸出的角度來分析采用反饋控制器1與反饋控制器2對系統懸浮穩定性的影響。由于磁浮列車-軌道梁耦合系統僅包括懸浮系統與軌道梁2個部分。根據對唐山磁浮線路的實際測量,軌道梁的振動特性可以用一定頻率的正弦函數或余弦函數來表示[23]。由于能量的大小可以通過功率來反映,而功率的大小為作用力與被作用物體的速度大小的乘積來表示。為方便從能量的角度來探究不同軌道梁頻率段車軌耦合振動的本質,這里不妨以軌道梁的速度作為輸入,作用在軌道梁上的懸浮力作為輸出。該傳遞函數可以表示為
HFV(s)=F(s)/V(s)
(23)
在某時刻,以振動頻率為ω,振動幅值為0.2 m/s2,無相位差的正弦函數來模擬軌道梁的振動特性,即v(t)=0.2sin(ωt)。可知作用在軌道梁與懸浮系統之間的電磁力為
F(t)=0.2HFV(jω)|sin[ωt+∠HFV(jω)]
(24)
進一步分析可知,在一個時間周期內電磁懸浮力作用在彈性軌道梁上功率大小為
(25)
式中:T為積分時間。采用表1中的相關參數,式(21)、式(22)對應的控制器1與控制器2時,懸浮系統作用在軌道梁上的平均功率見圖8。
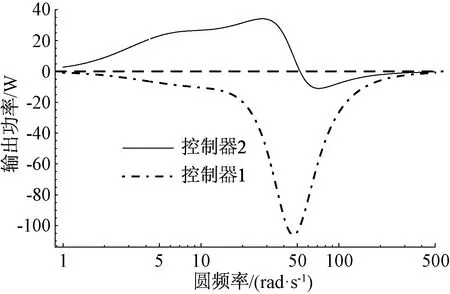
圖8 無軌道阻尼時懸浮系統輸出功率
由圖8可以看出,采用傳統的控制方式即僅將懸浮電磁鐵的振動狀態進行主動控制,當軌道梁振動頻率約低于50 rad/s時,懸浮系統向軌道梁輸出能量,此時更容易激起車軌耦合振動。只有當軌道梁振動頻率約高于50 rad/s時,懸浮系統才吸收軌道梁振動的能量,但對能量的吸收也相當少,最大僅有10 W左右。而采用將軌道梁、懸浮電磁鐵以及車體的振動狀態同時引入反饋控制系統進行主動控制的方式,在整個軌道梁振動頻率范圍內,懸浮系統始終不向軌道梁輸出能量。同時在軌道梁振動頻率為48 rad/s附近,懸浮系統對軌道梁的振動能量最大可吸收約為110 W。說明采用控制器1的反饋控制方式能夠較好的抑制系統在低頻段的車軌耦合振動。
由于實際的軌道梁還存在一定的阻尼,如果懸浮電磁鐵向軌道梁輸出的功率大于軌道梁阻尼消耗的功率,那么必然導致整個系統集聚的能量越來越大,從而導致整個系統懸浮失穩。忽略模態阻尼的非線性特性時,經計算軌道梁阻尼對橋梁的吸收功率為[23]
Pb=0.01ξωm1
(26)
式中:ξ為軌道梁阻尼比。當考慮軌道梁阻尼消耗的能量后,懸浮系統作用在軌道梁上的平均功率見圖9。
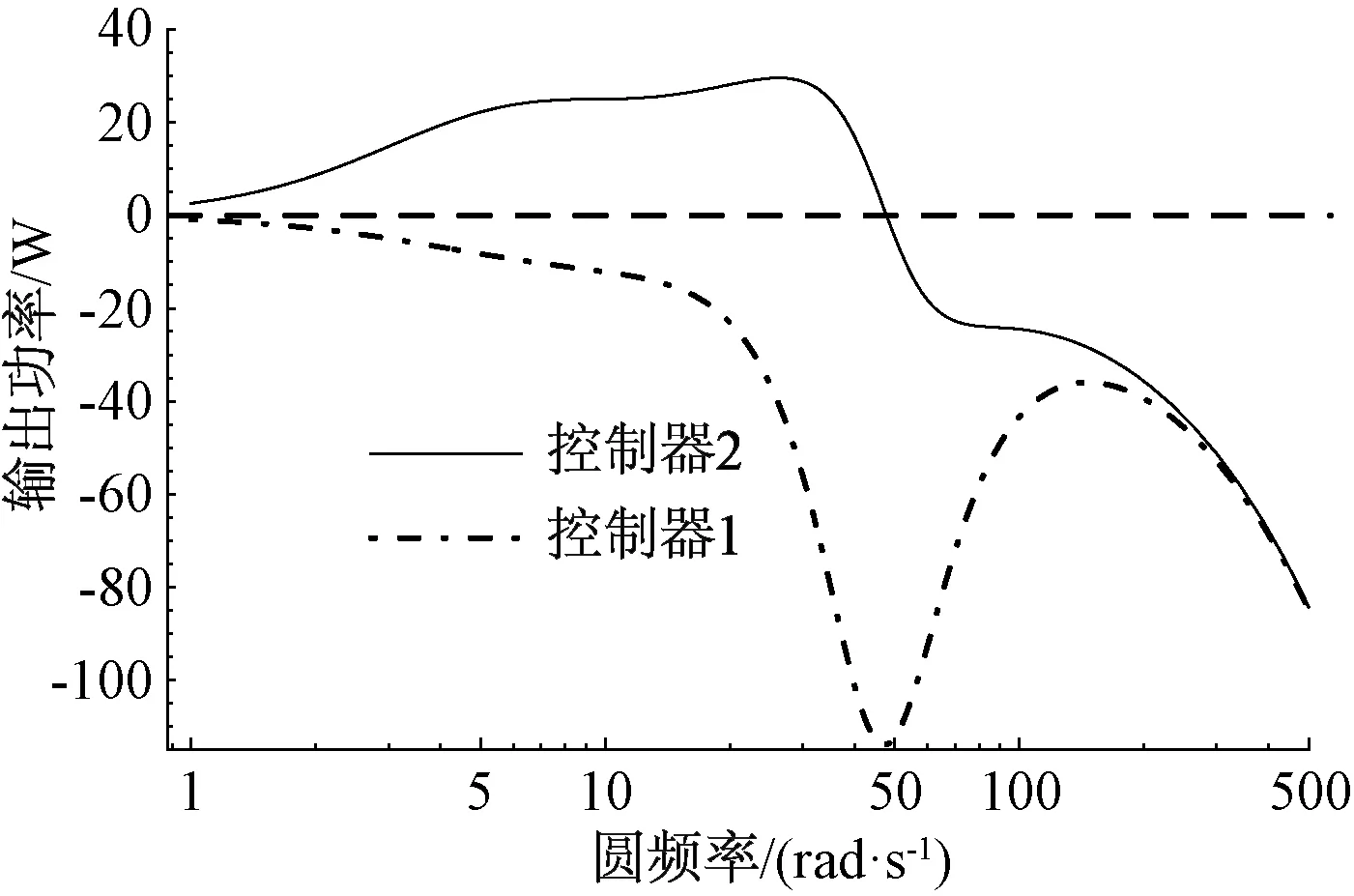
圖9 有軌道阻尼時懸浮系統輸出功率
由圖9分析可知,由于軌道梁阻尼消耗的功率十分有限,采用控制器2的反饋孔子方式,即使考慮軌道梁阻尼對軌道振動能量的消耗,當軌道梁振動頻率低于50 rad/s左右時,懸浮系統仍然對軌道梁輸出能量,最終必然導致懸浮系統失穩。而采用控制器1的反饋控制方式,懸浮系統在整個軌道梁振動頻率段內都不向軌道梁輸出能量,能保持系統較好的穩定懸浮。由表1可知,本文軌道梁振動圓頻率約為16 rad/s,由圖9可知在該頻率段內,采用控制器2的反饋控制方式,懸浮控制器將向軌道梁輸出能量從而導致懸浮失穩。
4 結論
針對彈性軌道梁-懸浮電磁鐵-車體垂向耦合振動模型,通過本文的仿真分析可得出以下結論:
(1)基于AHP法,在一定程度上可程序化的求取系統二次型性能指標中狀態加權矩陣權重系數求解困難的問題,且能實現系統的穩定懸浮。
(2)在軌道梁阻尼一定時,當軌道梁剛度較低時(圓頻率較低時),僅對懸浮電磁鐵的振動狀態進行主動控制,懸浮系統可能向軌道梁輸出能量,從而引入系統出現車軌耦合振動。但隨著軌道梁剛度的增加,懸浮系統將吸收軌道梁的振動能量,從而抑制系統的車軌耦合振動,可能這也是工程中常常采用增加軌道梁剛度來抑制車軌耦合振動的原因。
(3)在軌道梁阻尼一定時,采用將軌道梁、懸浮電磁鐵以及車體的振動狀態引入反饋控制器進行主動控制的方式,懸浮系統能吸收軌道梁輸出的能量,從而抑制車軌耦合振動。同時能夠實現系統在低軌道梁剛度上的穩定懸浮。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
艦船科學技術(2022年8期)2022-06-05 07:36:28
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
