基于擴展卡爾曼濾波的電動汽車鋰電池組SOC估算*
2020-12-07 05:25:38杜玉環商世廣
計算機與數字工程 2020年10期
杜玉環 商世廣
(西安郵電大學電子工程學院 西安 710121)
1 引言
隨著世界經濟和交通運輸的發展,環境污染和能源短缺等問題日益突出,電動汽車以其零排放、無污染和節能環保等優點逐漸取代了傳統燃油汽車被廣泛應用到現代生活中[3]。作為電動汽車最關鍵部分,動力電池組在電動汽車行駛能力和安全性能等方面起到至關重要的作用,鋰電池因其容量大、自放電率低、安全性能好和使用壽命長[4]等優點成為電動汽車的首選電源。為了防止汽車鋰電池出現過壓、欠壓和剩余電量不足等問題,管理電動汽車動力鋰電池成為必要,管理鋰電池的核心是對鋰電池荷電狀態(State of Charge,SOC)進行估算。
目前,國內外關于SOC的估算方法常見的有開路電壓法、負載電壓法、內阻法、安時積分法、線性模型法、卡爾曼濾波法和神經網絡法等[5],這些估算方法存在估算誤差大、降低噪聲效果不理想等缺點,難以實現對SOC 的準確估算。文中采用EKF算法實時估算鋰電池SOC,并考慮電池內阻對估算精度的影響改進了EKF 算法,通過Matlab/Simulink工具箱構建二階RC 電池等效電路模型,結合算法進行仿真。結果表明,改進后的EKF算法具有更精確的估算結果,將鋰電池SOC 估算誤差減小到2%以內。
2 電池模型構建及參數辨識
2.1 鋰電池等效模型構建
基于戴維寧等效電路[6]的二階RC 等效電路模型如圖1。
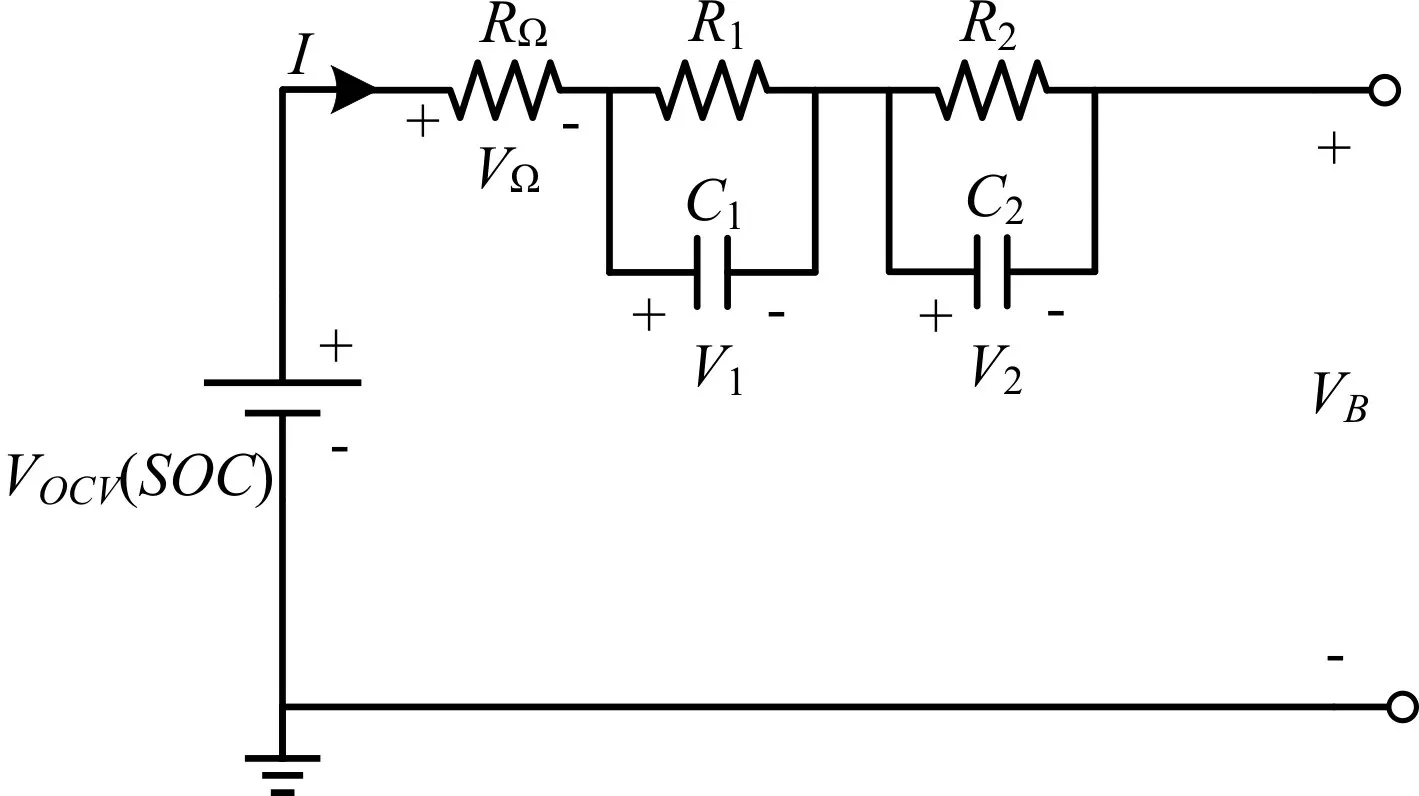
圖1 鋰電池等效電路模型
圖1 中,電池開路電壓用VOCV(SOC)表示[7],流過電池的電流用I表示;RΩ表示電池歐姆內阻;R1、R2分別表示電池極化內阻;C1、C2分別表示電池極化電容。
VB表示電池模型的端電壓:

V1是R1C1網絡的電壓:

V2是R2C2網絡的電壓:

SOC 是電池剩余容量與額定容量在放電倍率一定時的比值[8]:

式(4)中,用SOC0表示SOC 的初始值,電池額定容量用QN表示,庫倫效率用η表示。
根據等效電路將式(1)、(2)、(3)和(4)中各部分的數學關系寫成狀態方程并且離散化:


式(5)中,Δt為采樣周期(s)。
2.2 模型參數辨識
鋰電池的充放電過程是非線性的,電池模型中各參數很難通過理論分析獲得,可對電池模型施加激勵信號求其響應獲得[9]。文中采用充放電實驗儀器對電池進行脈沖充放電,對額定電壓為3.7V的三元鋰電池采用1C 放電倍率放電60s,然后靜止420s,圖2為電池端電壓響應曲線:
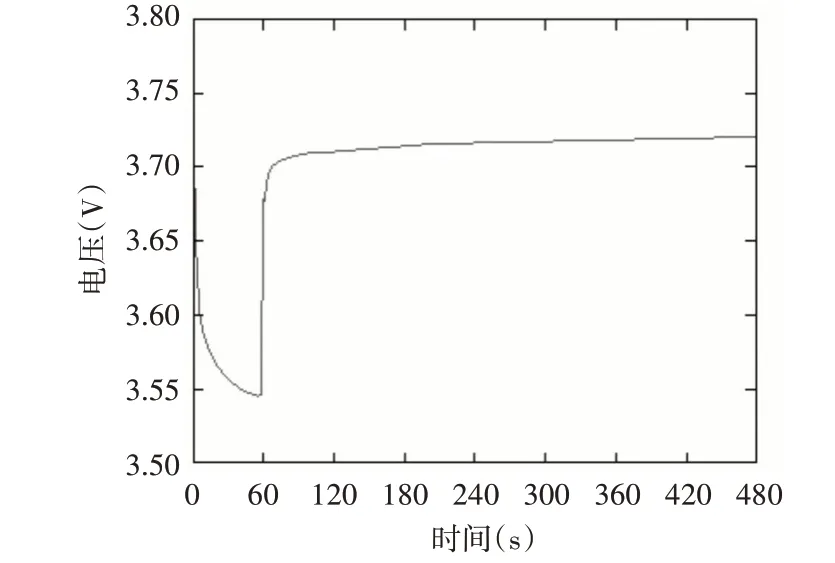
圖2 電池端電壓響應曲線
圖2 中放電時電池端電壓先急劇下降然后緩慢下降;停止放電后電池端電壓先急劇上升然后緩慢上升。流過電池的電流在停止放電瞬間消失,歐姆內阻RΩ會引起電池端電壓變化:

由圖2 可知,R1C1和R2C2組成的串聯網絡放電時端電壓輸出方程為

式(8)中VOCV(C)表示C 點的開路電壓值(V),τ1、τ2為時間常數,且τ1>τ2,τ1=R1C1,τ2=R2C2,導入圖2 放電靜置階段的電壓響應數據,建立零輸入響應數學模型,利用Matlab 工具對模型參數C1、C2、R1、R2進行指數擬合法辨識,辨識結果見表1。

表1 電池等效電路模型參數
3 擴展卡爾曼濾波SOC估算
3.1 卡爾曼(Kalman)濾波算法
Kalman 濾波器能夠實現從不準確的輸入數據中通過濾波更新獲得逐漸趨近于目標數據的輸出信息[10],其主要任務是獲得最小方差估計,并使用估計誤差協方差矩陣P 的值作為評價估算精度的重要參考。Kalman 濾波離散狀態空間方程如下:

式(9)為狀態方程,式(10)為量測方程;xk為系統狀態變量;yk為系統觀測變量;uk為系統激勵;A 為狀態轉移矩陣;B 為輸入矩陣;C 是測量矩陣,D 是前饋矩陣。
狀態方程噪聲用wk表示;量測方程噪聲用vk表示,假設wk和vk都是零均值的高斯白噪聲且互不相關,滿足:

式(11)中,Qk表示噪聲wk的協方差。

式(12)中,Rk表示噪聲vk的協方差。
采用Kalman 濾波算法建立狀態空間方程,并利用電池開路電壓VOCV(OCV)與SOC 之間的特殊關系來估算SOC 值,估算流程如圖3。輸入量與觀測量分別為電流I與電壓V。
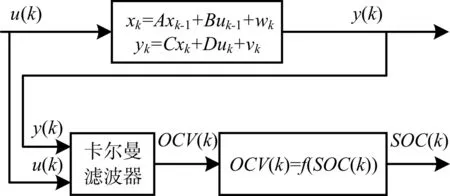
圖3 Kalman濾波估算流程
Kalman 濾波算法有估算準確、運算方便等優點,但其不能消除隨著開路電壓誤差累計導致的SOC估算誤差,在實際應用中存在一定缺陷。
3.2 擴展卡爾曼濾波算法建模
卡爾曼濾波算法中狀態變量、系統激勵和觀測變量之間的關系是線性的,電動汽車鋰電池的SOC與放電倍率、容量和溫度等諸多因素非線性相關,將Kalman 系統狀態空間方程改為函數f(xk-1,uk-1)和g(xk,uk)的狀態空間方程[11],在該非線性動態系統中開路電壓的誤差積累將會被減小,從而得到更加精確的估算結果。將該算法稱作擴展卡爾曼濾波算法(Extended Kalman Filte,EKF)[12]。狀態空間模型如圖4所示。
EKF系統狀態空間方程:
式(13)中,f(xk-1,uk-1)為非線性狀態函數;g(xk,uk)為非線性測量函數。

圖4 EKF狀態空間模型
將非線性離散函數f(xk,uk)及g(xk,uk)進行泰勒一階展開[13]。設兩個函數在各點均可導,則:

定義:
公式線性化之后,表達式與狀態向量xk的關系:

EKF算法的流程具體的操作步驟如下。
1)初始化

2)預測過程
狀態預測方程:

狀態預測協方差方程:

3)校正過程
反饋增益方程:

濾波方程:

協方差更新方程為

3.3 改進擴展卡爾曼濾波算法
電池充放電過程中內組RΩ會產生輕微的變動會影響SOC 估算精度[14],本文在EKF 估算過程中考慮內阻的狀態更新:
狀態方程:

觀測方程:

利用EKF 算法對內阻RΩ和SOC 值進行同時估計,優化內阻參數,形成新的擴展卡爾曼濾波算法,改進后的EKF算法估算流程如圖5所示。
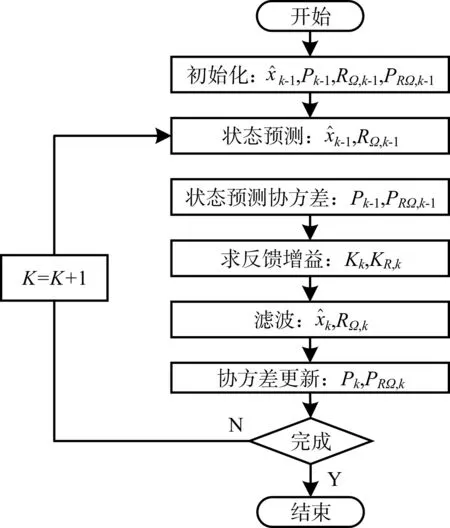
圖5 改進EKF算法估算流程
4 鋰電池仿真實驗結果
本文的實驗對象是3.7V/40Ah 的三元鋰電池,實驗環境溫度為20℃。實驗平臺由電池測試儀和計算機組成,分別在恒流放電和動態測試工況下對算法精度進行驗證。
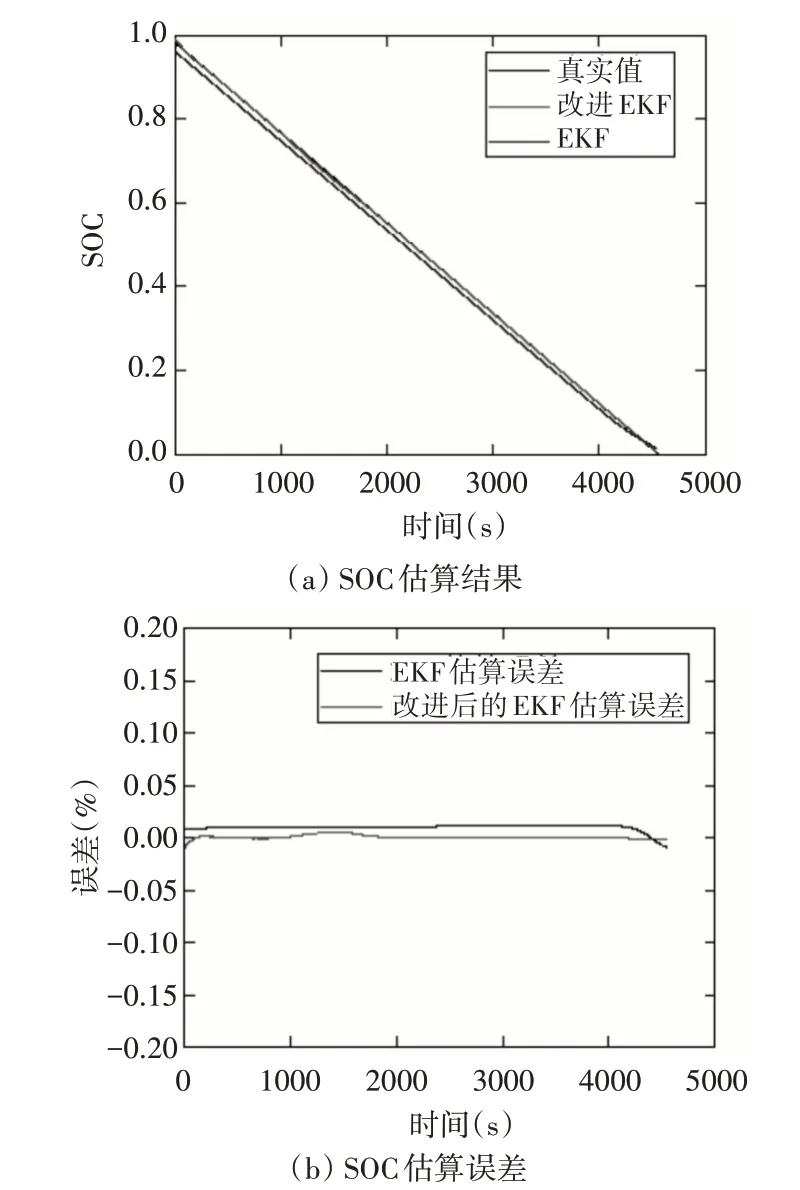
圖6 恒流放電工況下的估算結果以及估算誤差
電池恒流放電倍率為0.75C,實驗結果如圖6所示。圖6(a)為SOC真實值、EKF估算值和改進后的EKF 估算結果對比,可以看出改進后的EKF 算法估算結果更接近真實值;圖6(b)顯示了EKF 算法和改進后的EKF算法估算誤差,可以看出改進后的EKF 估算誤差最大值為1.57%,驗證了該算法的精確度。
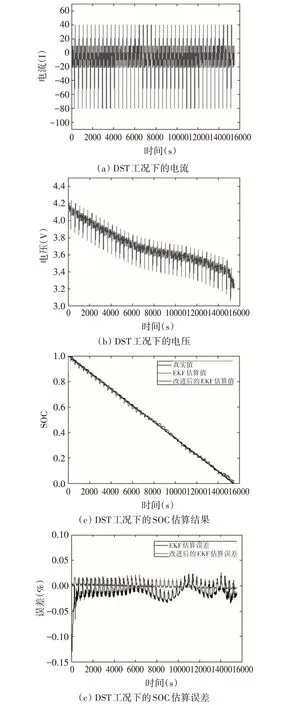
圖7 DST的工作條件及SOC估算結果和估算誤差
動態應力測試(Dynamic Stress Test,DST)是USABC電池測試手冊中對聯邦城市駕駛計劃(Fed?eral Urban Driving Schedule,FUDS)的簡稱[15]。圖7為DST 工況下三元鋰電池的電流值、電壓值、SOC估算結果和估算誤差。電流曲線如圖7(a)所示,在每個放電周期內設置不同的放電倍率,每360s 為一個放電周期;電壓曲線如圖7(b)所示,從圖中可以看出放電過程中電池電壓從4.3V 下降到3V 左右;DST 工況下的SOC 真實值、EKF 估算值和改進后的EKF 估算值如圖7(c)所示,從圖中可以看出改進后的EKF估算結果更接近真實值;誤差對比如圖7(d)所示,可以看出在DST工況下改進后的EKF誤差保持在2%以內,提高了SOC估計的精度,收斂性更好。
5 結語
電池管理系統的核心技術是SOC 估算[16]。本文在EKF 算法基礎上考慮內阻對SOC 估算精度的影響,提出了一種新的估算方法。為了描述電池的外部特性,建立了二階RC 等效電路模型并且對模型參數進行辨識。與EKF算法相比,改進后的EKF算法具有更高的估計精度。最后分別在恒流放電工況下和DST工況下驗證了該算法的有效性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
測控技術(2018年12期)2018-11-25 09:37:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
光學精密工程(2016年6期)2016-11-07 09:07:19
電源技術(2016年9期)2016-02-27 09:05:39
核科學與工程(2015年4期)2015-09-26 11:59:03
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
