基于多偵察接收機條件下的雷達信號分選方法
2020-11-26 10:54:20錢志亞
艦船電子對抗 2020年5期
關鍵詞:信號
錢志亞,李 鵬
(中國船舶重工集團公司第七二三研究所,江蘇 揚州 225101)
0 引 言
偵察機裝備通過天線接收雷達輻射的脈沖描述字(PDW)信號,經過分選處理生成合批后的輻射源描述字(EDW)數據,最后在界面上顯示,供操作員進行決策。在對偵察機裝備的操作訓練中,如果用列裝的雷達裝備進行實物訓練,訓練成本高且容易泄密。因此通過向偵察機裝備推送由半實物仿真系統生成的PDW數據或EDW數據來進行訓練,就很有用。與實物訓練相比可節省資金和時間,與純數字仿真生成的EDW數據或PDW數據相比訓練效果更貼近實際。
本文主要講解了PDW數據、EDW數據在軟件方面的分選處理過程,如何把一個靜態的信號環境變成一個動態的信號環境[1-2]。
1 系統架設
該半實物仿真系統主要包括雷達信號環境模擬分系統(含信號顯控計算機和多個信號模擬器)、偵察仿真分系統(含偵察顯控計算機和PDW存儲處理計算機)、導控計算機、通用頭偵收設備(簡稱通用頭)、數據流轉換設備、各偵察機裝備模擬器(簡稱偵察機)以及一個暗室環境,本系統可以同時針對多個偵察機分別生成對應的EDW數據和PDW數據。
導控計算機分別和信號顯控計算機、偵察顯控計算機網絡連接,信號顯控計算機和各信號模擬器網絡連接。
偵察顯控計算機和PDW存儲處理計算機、各偵察機網絡連接。
通用頭和數據流轉換設備通過低壓差分信號(LVDS)總線連接。
數據流轉換設備和各偵察機通過LVDS總線連接,和PDW存儲處理計算機通過光纖連接,PDW存儲處理計算機上安裝數據采集卡。
各信號模擬器的發射天線安裝在暗室四周,同一個頻段的模擬器要相互錯開,至少相距20°以上,通用頭安裝在暗室中間轉臺上,需測量各發射天線和通用頭的安裝角度。
在導控計算機上設置戰情態勢、氣象信息、各平臺及各偵察機的運行軌跡,每個平臺上有若干個雷達信號。導控計算機對設置好的雷達信號分配通道,每個雷達信號設置2個幅度值Pa1和Pa2,Pa1是控制雷達信號模擬器產生信號時使用;Pa2是雷達信號在平臺上發射時的信號幅度,在解算偵察機收到的實際信號幅度時使用。系統架構圖如圖1所示。
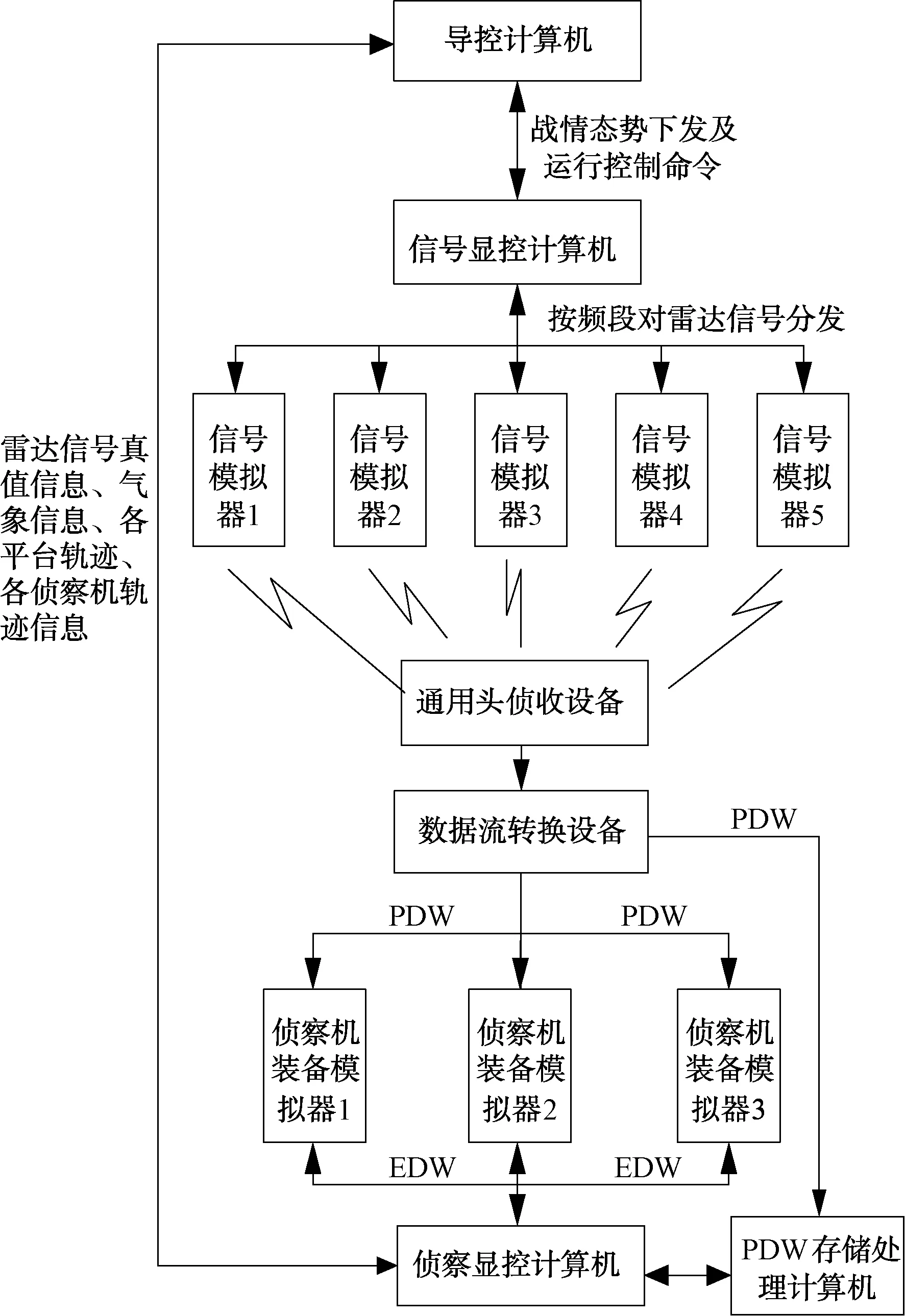
圖1 系統架構圖
2 實時數據采集與顯示
導控計算機初始化下發戰情態勢,信號顯控計算機收到雷達信號參數后,分配到各通道。偵察顯控計算機收到氣象信息、雷達信號參數和偵察機與平臺的初始位置信息后,創建雷達真值文件,把偵察機和平臺的位置信息保存到數組向量中,等待導控計算機的開始命令。
訓練開始后,各信號模擬器通過天線向暗室中的通用頭發送復雜電磁環境信號(脈沖描述字PDW)。通用頭收到PDW后,實時發送給數據流轉換設備,由其進行實時處理并轉發給各個偵察機,同時通過光纖將PDW數據發送給PDW存儲處理計算機進行保存。
各偵察機收到PDW數據后,進行數據融合處理,生成EDW數據并發送給偵察顯控計算機進行顯示和保存。在界面中顯示各偵察機的EDW數據信息,顯示各信號的批號、方位、載頻、重復周期、脈寬和信號幅度。
運行過程中導控計算機可執行參數修改、模式切換、信號開關機等操作,該操作同時發送到信號顯控和偵察顯控計算機。信號顯控計算機負責控制信號模擬器對雷達信號進行導調,偵察顯控計算機對被導調雷達的信號參數和時戳進行保存。
訓練結束后偵察顯控計算機保存EDW數據、軌跡數據以及雷達信號真值數據。
3 EDW分選處理
偵察機的EDW數據基本上包含新增報文(含批號、載頻、重復周期、脈寬、方位和幅度等信息)、更新報文(含批號、方位和幅度等信息)和消失報文。EDW分選處理是對EDW數據與雷達信號真值進行匹配,找到對應平臺,更改方位和幅度,插入更新報文,判斷視距和幅度。
若某批號與偵察機視距小于所在平臺與偵察機距離,或偵察機偵收的信號幅度小于靈敏度,該批號要刪除。匹配失敗則認為是雜亂信號,報文不變。另外還可進行信號刪除、修改、插入3種操作,最后對批號重新編排。EDW的分選處理流程如圖2所示。
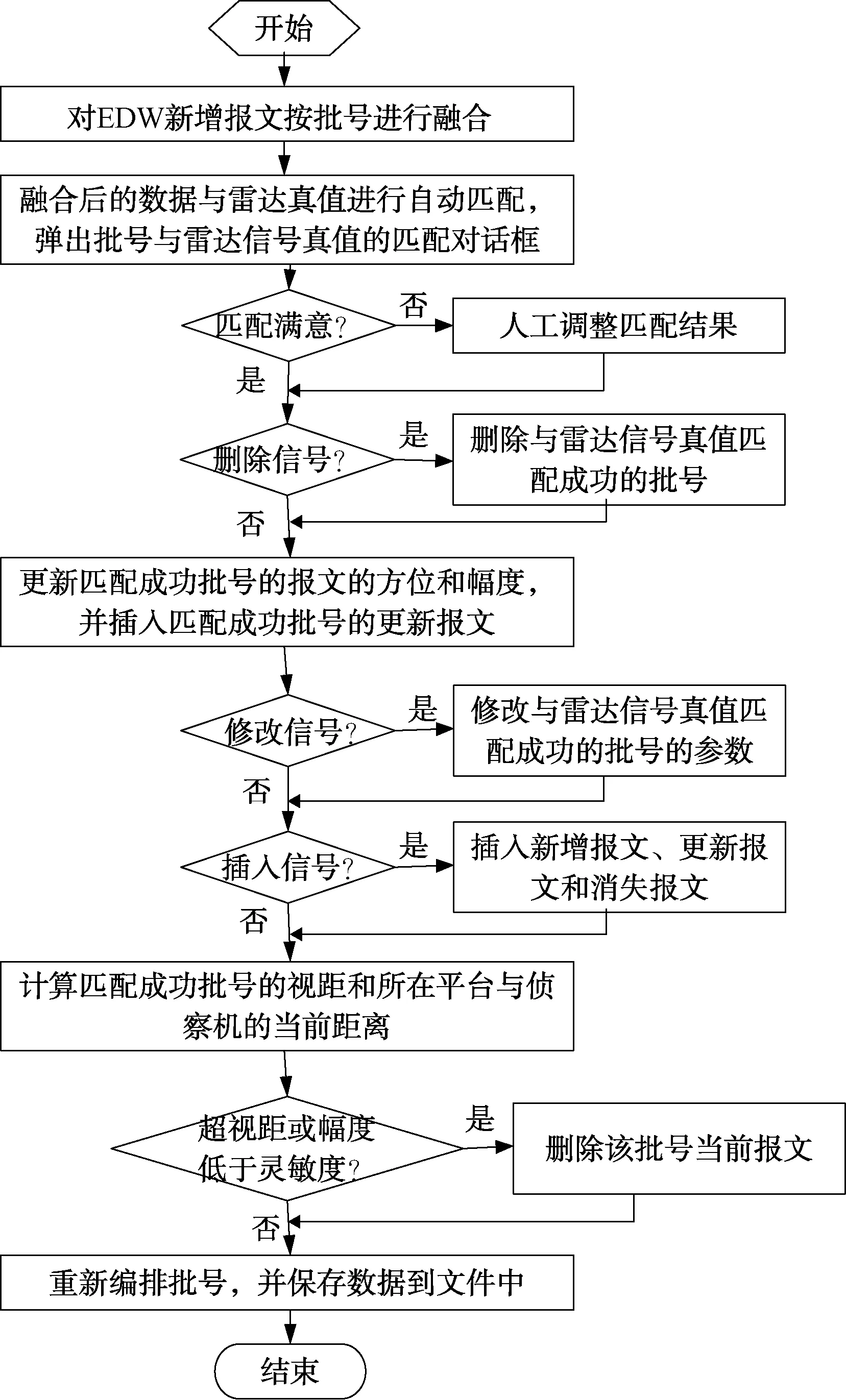
圖2 EDW分選處理流程圖
融合后的EDW報文和雷達信號真值的匹配過程是最重要的步驟,理想情況是某個批號的方位和某個雷達信號真值所在通道的方位接近,時域也匹配,同時頻率、重復周期、脈寬參數也很接近,則該批號和雷達信號真值匹配成功,且為主信號。
但實際情況可能1個雷達信號真值有多個EDW報文對應,且出現增批現象。因此自動匹配時先找符合四大要素的主信號,剩下未匹配成功的EDW報文中再找出方位增批、頻率增批、重復周期增批和脈寬增批信號。自動匹配完成后彈出匹配結果對話框,匹配結果如圖3所示,可手動調整匹配結果。
更新EDW報文的方位和幅度時,根據時戳讀取軌跡數據,解算出該時刻平臺相對偵察機的方位和距離信息。
根據雷達信號頻率、幅度Pa2、氣象信息和距離,解算該時刻偵察機收到的實際信號幅度,替換原報文中的方位和幅度值。由于暗室中雷達信號的方位和幅度比較穩定,因此偵察機的更新報文很少,甚至沒有。但實際戰情態勢中,各平臺和偵察機都在運動,方位和幅度也在變化,因此需插入多個更新報文。
4 PDW分選處理
PDW數據處理時,1次讀取1 s的PDW數據,每個PDW包含到達時間(TOA)、載頻、脈寬和方位值。將PDW數據與雷達信號真值進行參數匹配,時間、方位、載頻和脈寬都符合的認為是主信號。
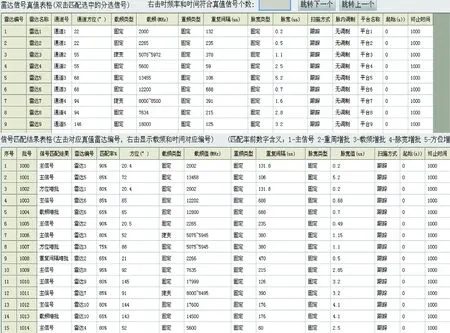
圖3 EDW匹配結果
找到對應的平臺,判斷視距和幅度,如果某個PDW超視距或解算出偵察機偵收到的實際信號幅度小于偵察機的靈敏度,則該PDW也要刪除。更改每個PDW的方位和幅度。匹配失敗則認為是雜亂信號,不進行處理。另外分選處理還能完成信號刪除、參數修改、插入3種操作。
根據各平臺與偵察機的軌跡數據,解算出當前時刻每個平臺相對偵察機的方位和距離,并解算出每個雷達信號真值在偵察機位置的實際幅度,以及每個雷達信號真值與偵察機的視距大小。
修改雷達信號真值的重復周期參數時,遍歷所有PDW,將對應的原PDW先刪除,然后按新的重復周期插入新PDW,若對應的時間位置沒有空隙,則該PDW丟棄。插入新的雷達信號真值時,按重復周期插入PDW,若對應的時間位置沒有空隙則該PDW丟棄。更新匹配成功PDW的方位時,方位采用插值算法,根據1 s前后平臺的不同方位值,可以推算出中間某個時間段的具體方位值。PDW的分選處理流程如圖4所示。
5 結束語
要想達到較好的EDW數據和PDW數據分選處理效果,設置戰情態勢時各雷達信號真值相互之間的頻率參數要盡量錯開,若錯不開需要分配到不同的通道,同頻段的各通道在暗室中的方位要錯開20°以上,避免方位判斷模糊。另外分選處理效果還和信號模擬器的信號生成質量、通用頭的偵收能力以及各偵察機的分選能力有關。
如果更換偵察機和平臺軌跡,就可以模擬生成一個新的動態環境態勢數據。
經過多輪測試,本系統在復雜信號環境下EDW的自動匹配率能夠達到80%以上,加上人工匹配功能,對漏配的EDW進行手動調整,最后能達到滿意的分選處理效果。
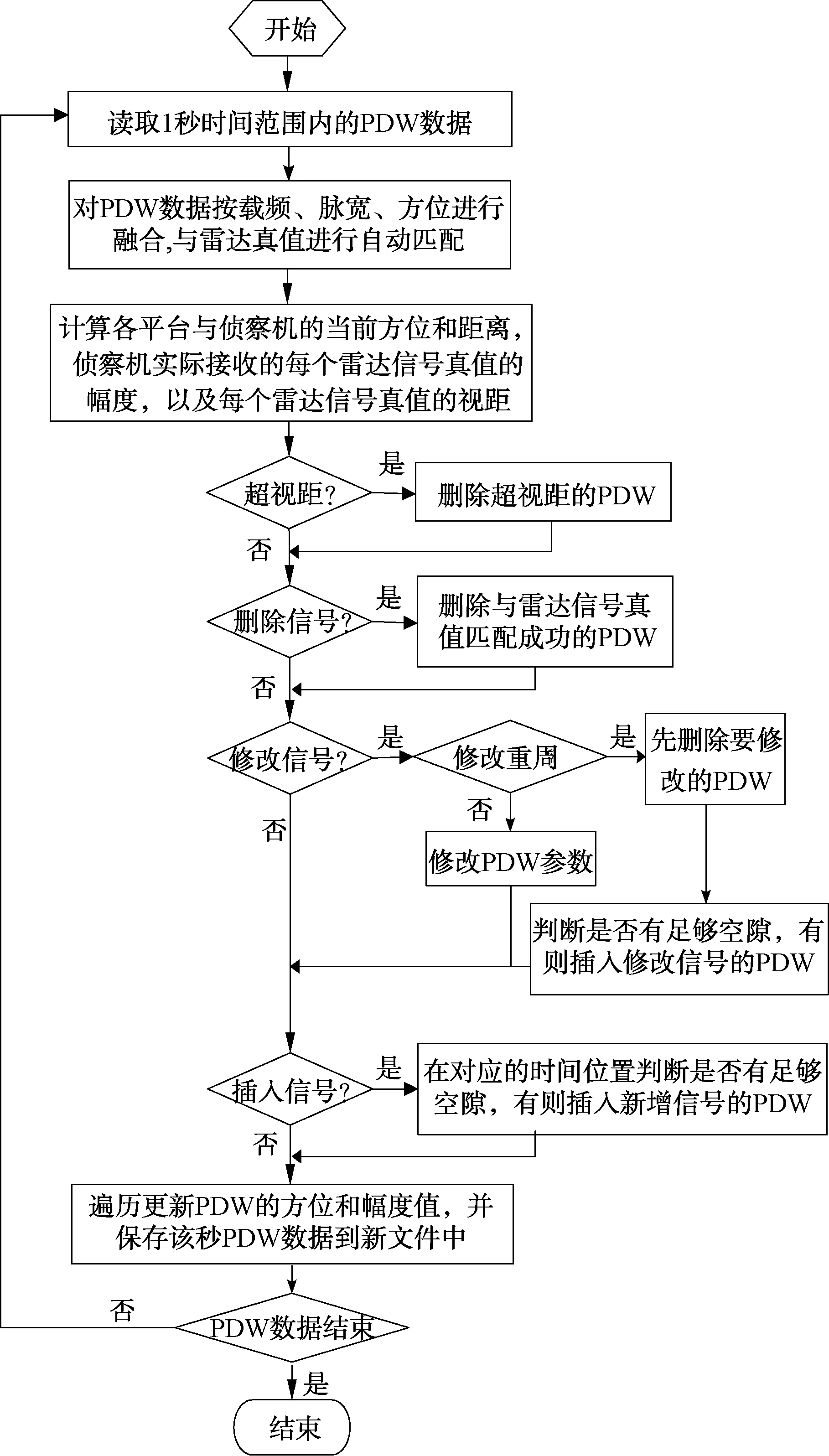
圖4 PDW分選處理流程圖
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
