基于VC6.0的相控陣雷達視頻仿真系統
2020-11-26 10:54:06劉德龍
艦船電子對抗 2020年5期
關鍵詞:數據處理
張 琛,劉德龍,戴 健
(中國船舶重工集團公司第七二三研究所,江蘇 揚州 225101)
0 引 言
雷達的工作原理是輻射電磁能量并檢測反射體反射回波,通過對回波信號中的時間、回波到達角等參數的計算可以得到目標的距離、方位等信息[1]。
相控陣雷達天線具有波束快速變化的特點,易于形成多個波束[2]。本文針對相控陣雷達體制,根據雷達點跡處理的要求,針對相控陣雷達特征,對雷達視頻進行方位向、俯仰向上的模擬,同時進行距離上的分裂模擬,以達到盡可能接近真實環境的視頻仿真效果。
1 問題描述
為了更好地驗證點跡提取、凝聚算法的真實可行性,本文介紹了基于相控陣雷達的視頻模擬器的算法實現,該模擬器在方位向以及俯仰向上的視頻分布符合相控陣雷達天線方向圖。當按照天線掃描區域構建完雷達視頻回波數據之后,將回波數據以網絡報文形式發送給數據處理模塊進行算法的驗證。
仿真系統基于VC6.0,通過圖形界面輸入模擬目標的距離、方位、仰角、航速、航向、俯沖角等參數,系統根據目標參數構建目標航路,根據掃描周期、波束間隔將航路分割成點跡,再將點跡按照雷達工作頻率、波束寬度、波束步進、掃描周期、掃描方式等相關區域參數分解成相應的回波幅度信息。
同時,在系統中內嵌了常用的雷達命令功能:雷達二次命令(航跡的撤批、改批等)、雷達錄取回放功能。本系統作為驗證相控陣雷達點跡數據處理、航跡數據處理的輸入源已經得到了深入的驗證。在處理過程中通過本系統模擬出視頻、點跡,以網絡形式將相應的數據發送給數據處理。
仿真系統可以通過自建航跡來達到分解航跡的目的,根據項目需求,系統可以模擬徑向運動目標、靜止目標、圓周運動目標、3G加速度目標以及多批目標運動靜止等等,以此多方面地驗證雷達數據處理算法的可行性。同時系統接收數據處理分機發送的點跡航跡數據,并在顯示屏以及列表中顯示。
2 視頻模擬算法
2.1 系統算法概述
仿真系統通過對雷達傳播方程的模擬,來實現對目標方位俯仰距離上的分裂,從而形成視頻回波。
本文以相控陣雷達的一種掃描方式(先方位掃后俯仰掃)為例,分析視頻仿真算法,其他掃描方式類似。仿真系統工作流程如圖1所示。點跡解算流程圖如圖2所示。視頻解算流程圖如圖3所示。

圖1 仿真系統工作流程圖

圖2 點跡解算工作流程圖

圖3 視頻解算工作流程圖
要想做好視頻仿真工作,首先要了解相控陣點跡處理的詳細算法。在雷達工作時,天線按照波位掃描,掃描到目標時返回回波。由于波位掃描到目標的角度不同,因此產生的回波能量也不同。在波位分布不是太分散的前提下,點跡處理在方位向和俯仰向上多波位接收到的視頻會形成拋物線軌跡,拋物線的頂點即可認定為目標所在位置。
以此為依據,結合目標運動規律、雷達方程、雷達工作參數,即可得到目標的幅度值。
2.2 點跡位置解算
2.2.1 直線題
首先計算出當前區域的相鄰波束時間:
(1)
式中:ts為當前區域掃描周期;Na為當前區域方位向上的波束個數;Ne為當前區域俯仰向上的波束個數。
當前目標水平速度為:
Vh=Vcosθfc
(2)
當前目標垂直速度為:
Vv=Vsinθfc
(3)
式中:V為當前目標速度;θfc為當前目標俯沖角。
一個天線周期運動所經過的路程在水平面上的分量為:
Sh=VhtminNb
(4)
一個天線周期運動所經過的路程在垂直面上的分量為:
Sv=VvtminNb
(5)
式中Nb為當前波位個數。
當前最新時刻的水平距離為:
(6)

當前最新時刻的垂直距離為:
(7)
當前仰角值:
(8)
當前方位值:
(9)
式中:δ在順時針時為1,逆時針時為-1,徑向為0。
由此可以計算出當前時刻目標所在位置,即目標點跡。
2.2.2 曲線題
將航路投影到直角坐標系。首先將航路投影到yz平面(假設原點位于圓心,隨后再轉換回來):
Dyz=Rcos(θa+Δθ)
(10)
式中:Δθ為2次計算的方位差。
目標在Z坐標中相鄰2次運動的距離差為ΔZ=Dyzsin(θfc),其中θfc為當前目標俯沖角。
目標當前的距離:
(11)
目標相對坐標為:
(12)
轉換為目標真實坐標:
(13)
最后再將直角坐標系轉換為目標的方位、仰角、距離:
(14)
由此即可得出目標新的方位、距離、仰角。
2.3 視頻解算

由Kerr提出的單基地雷達(發射接收同基地)方程[3]:
(15)

根據幅度系數、當前波位的波束指向、目標的位置即可得出目標在當前波位對應的幅度。
首先仿真出目標的實部、虛部[4]:
cosθecsinθac)+kDl(sinθe-sinθe)))
(16)
cosθecsinθac)+kDl(sinθe-sinθe)))
(17)
當前波位視頻幅度:
(18)
式中:Dr、Dl為行列單元的間距;θe、θa為目標的方位、仰角;θec、θac為當前波束的波束指向。
在使用時,可根據真實目標回波幅度大小的不同對幅度值進行相應的擴大縮小。
模擬5個接收波束,分別為中心波束、方位向上左右兩波束、俯仰向上上下兩波束。結構如圖4所示。
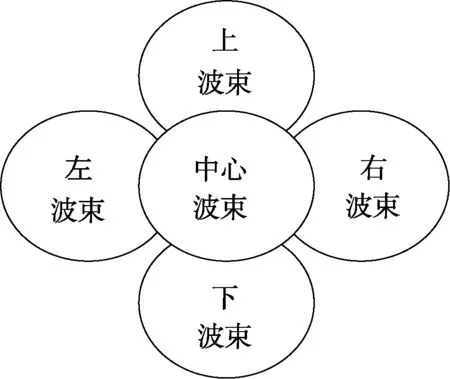
圖4 5個接收波束排列方式
在計算目標在其他4個波束上的回波幅度值的時候,只需要將θec、θac增加或減少相應的波束間隔即可。
之后為了驗證數據處理的距離凝聚,將目標在距離向上進行分裂即完成視頻仿真。
3 模擬視頻效果
方位向、俯仰向的仿真結果(波束寬度2°,方位俯仰步進5°,方位向上17個波束,俯仰向上3個波束,共51個波束)如圖5~圖7所示。
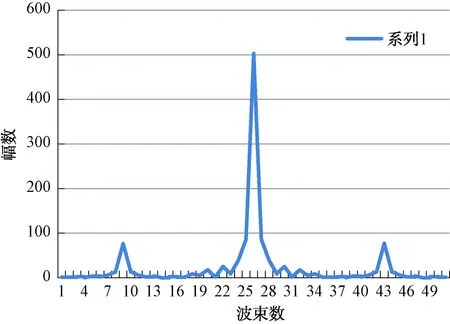
圖5 一個周期內各個波束上的視頻分布
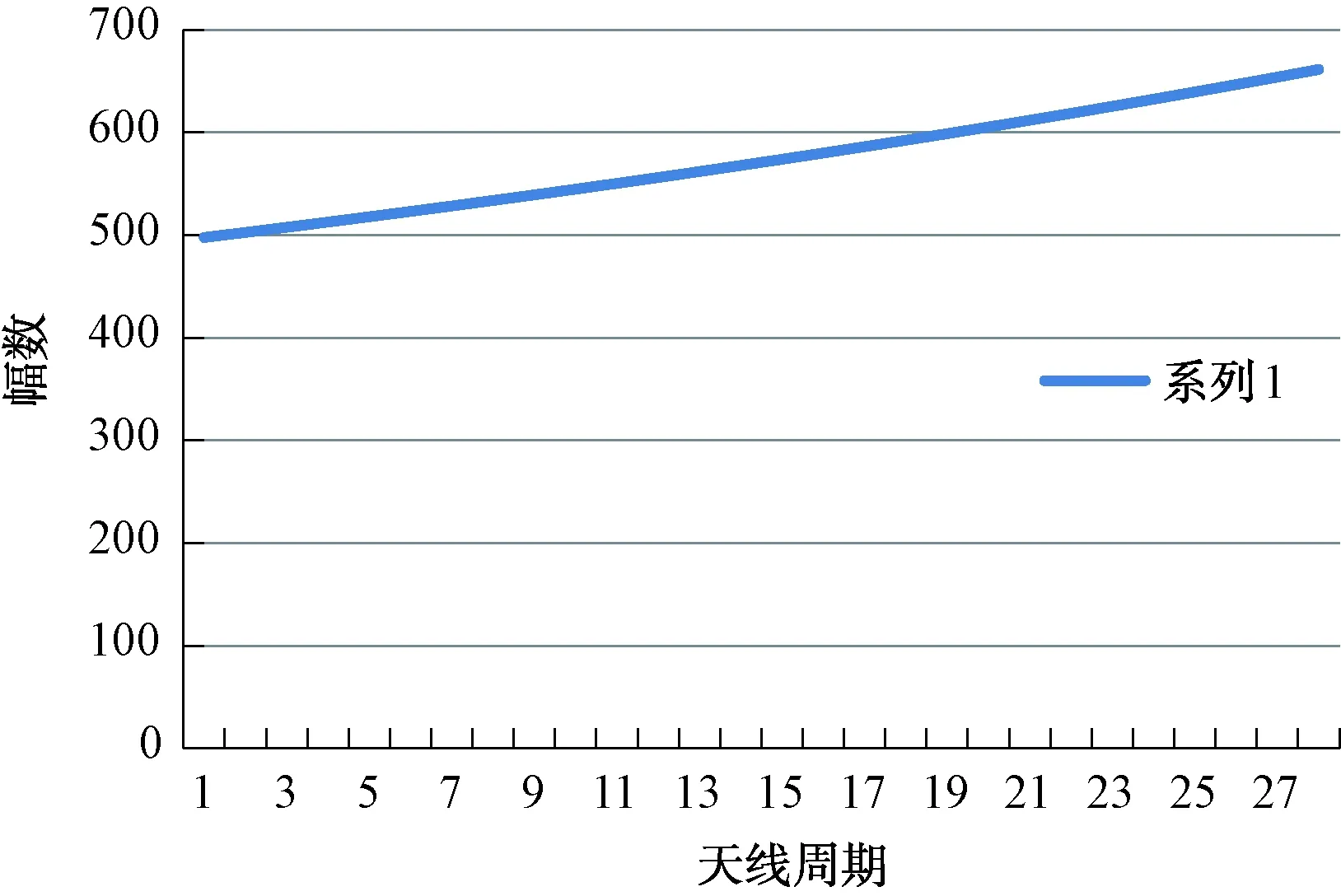
圖6 徑向向內目標不同周期幅度變化
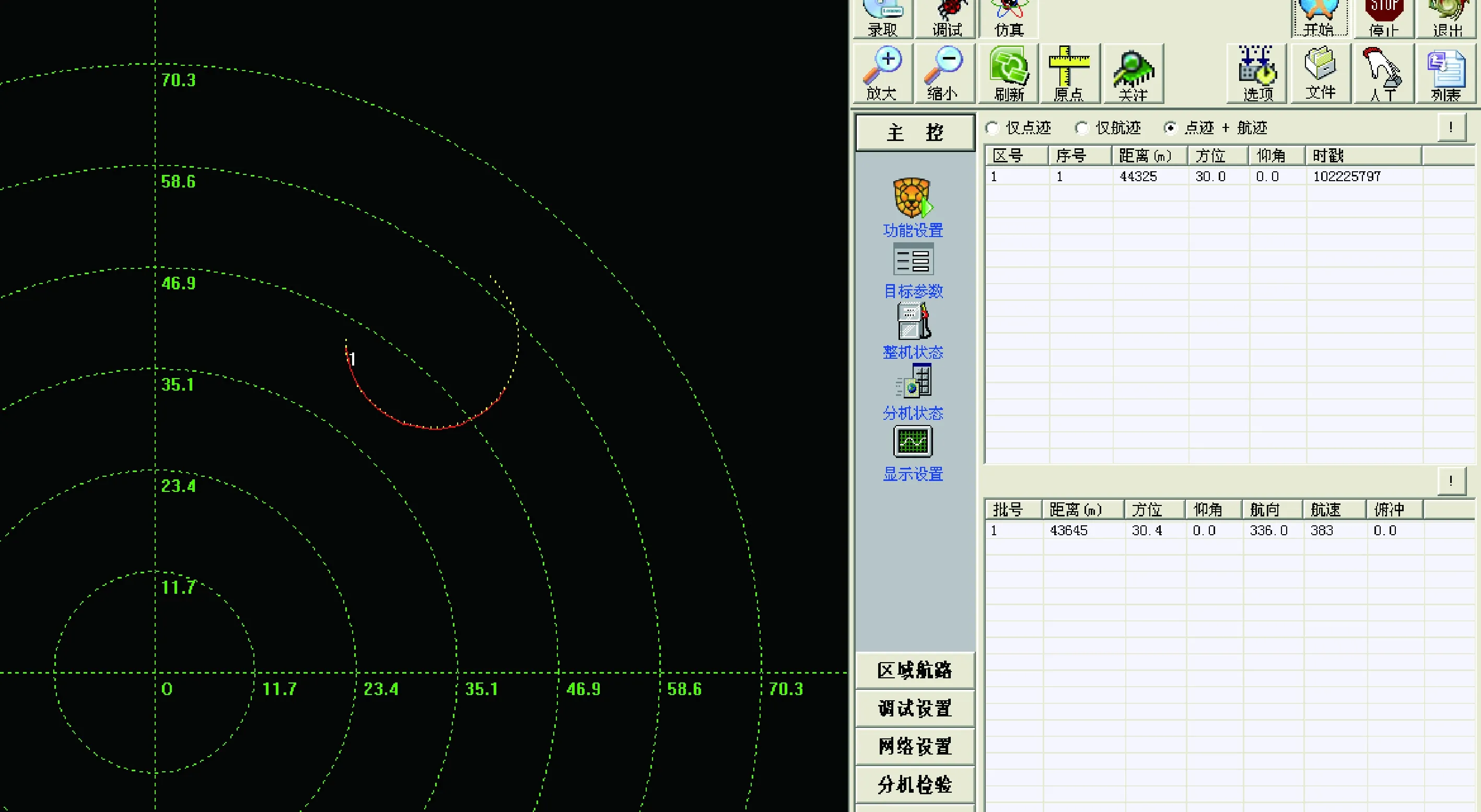
圖7 3G加速度仿真與驗證結果
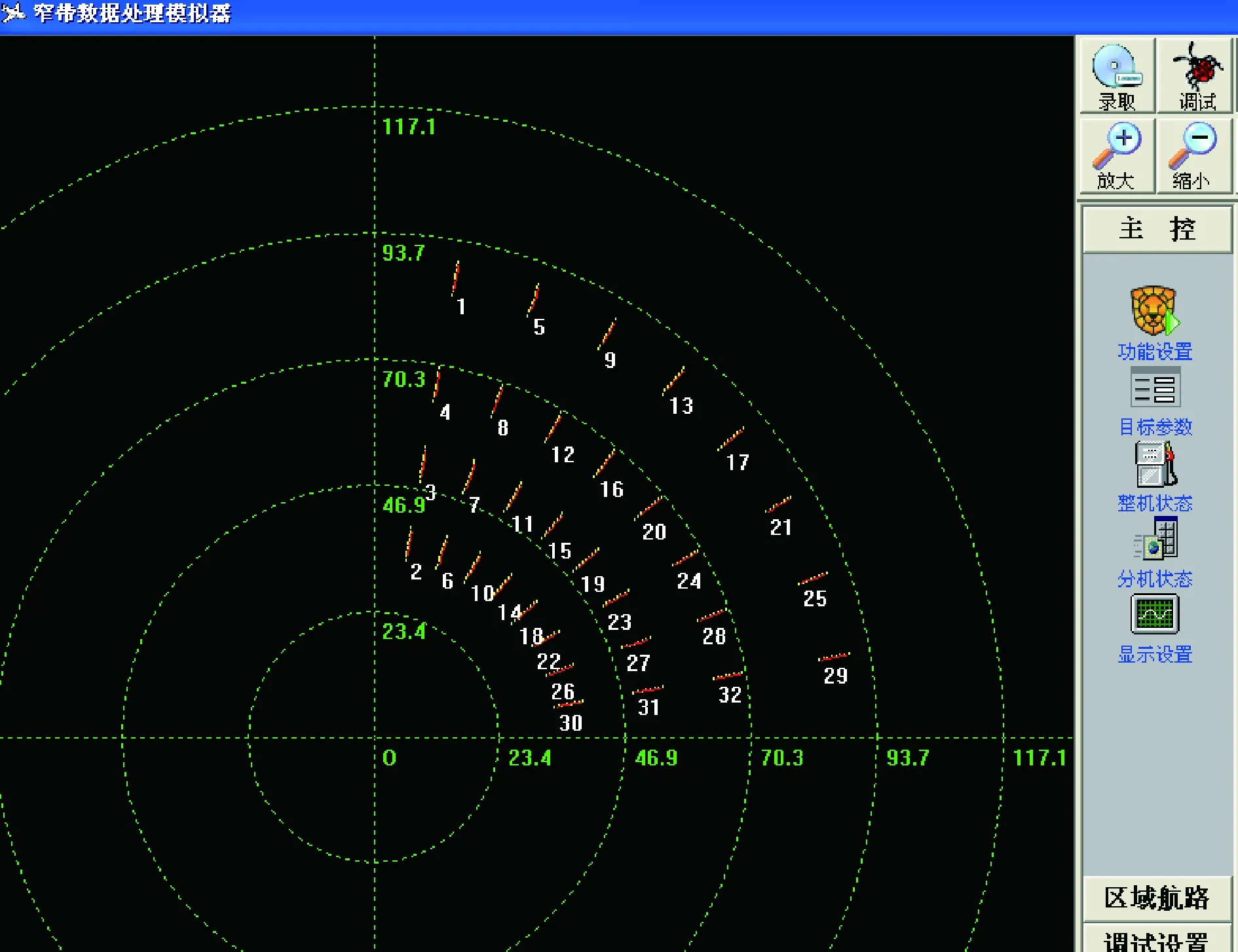
圖8 32批徑向目標仿真與驗證結果
4 結束語
本文主要介紹了相控陣雷達視頻仿真的整個流程,分析了點跡解析、視頻解析,對距離、方位、俯仰分裂等問題作了詳細的研究說明,最后對視頻仿真結果進行了驗證,同時利用將仿真結果通過數據處理進行真實性驗證。
猜你喜歡
中學生數理化·自主招生(2022年9期)2022-05-30 10:48:04
心理學報(2022年4期)2022-04-12 07:38:02
水泵技術(2021年3期)2021-08-14 02:09:20
電子測試(2018年4期)2018-05-09 07:28:12
當代化工研究(2016年9期)2016-03-20 16:22:13
中國慣性技術學報(2015年1期)2015-12-19 13:12:17
計算機工程(2015年4期)2015-07-05 08:28:04
西華師范大學學報(自然科學版)(2015年3期)2015-02-27 15:31:22
聯合國青年技術培訓(2014年7期)2014-04-12 00:00:00
中國質量與標準導報(2014年7期)2014-02-28 22:24:35
