平臺搖擺下艦載相控陣雷達被動探測測角誤差仿真
2020-11-26 10:53:58朱潤,沈凡,高清
艦船電子對抗 2020年5期
關鍵詞:信號
朱 潤,沈 凡,高 清
(中國船舶重工集團公司第七二四研究所,江蘇 南京 211153)
0 引 言
角度測量是相控陣雷達接收系統重要任務之一。被動超視距探測偵收的輻射源信號幅度受雙方天線方向圖調制以及傳輸路徑損耗起伏影響,難以通過多脈沖積累的方式獲得高精度測角結果。單脈沖測角僅憑單個脈沖信號即可完成輻射源精確測角,故被動超視距雷達常采用單脈沖測角方法對輻射源進行測向。
文獻[1]分析了單脈沖測角理論測角精度。文獻[2]對方向圖切割與相控陣天線安裝精度對測角精度影響進行了詳細分析研究。文獻[3]對不同信噪比對被動相控陣雷達測角精度影響進行了分析。文獻[4]根據相控陣雷達波束掃描導致波束展寬、歸一化斜率因子下降等因素對測角精度影響進行了仿真。本文對艦載平臺搖擺引起信號相對相控陣天線入射俯仰角變化,進而導致單脈沖比幅測角誤差進行了仿真研究。
1 比幅法單脈沖測角原理
相控陣雷達所采用的單脈沖測角方法主要有3種:幅度比較法、相位比較法、幅度相位比較法。被動相控陣雷達一般采用雙波束比幅法對入射信號進行測角[5]。2個相互交疊的波束方向圖分別為F1(θ)、F2(θ),如圖1所示。圖中θ1、θ2分別為2個波束最大增益所在位置。

圖1 相互交疊的2個接收波束
對于θ方向入射的信號,2個波束接收到的信號幅度比值為:
(1)
式中:G1、G2分別為2個波束對對應接收通道增益。
采用查表方法在預先存儲的K(θ)與θ1、θ2之間位置對應關系表中,獲取入射信號所在方位。對于3 dB交疊的2個波束,當信噪比為S/N時,單脈沖雙波束比幅測角誤差的理論極限為:
(2)
式中:θ3 dB為波束3 dB寬度;工程應用中,系數K一般取0.6~0.8。
2 坐標系轉換
艦船平臺羅經都采用卡爾丹環架結構,艦船地理坐標系到甲板坐標系的坐標變換必須按航向變換、橫搖變換及縱搖變換的順序進行。艦船地理坐標系OXYZ至甲板坐標系OXdYdZd變換步驟如圖2所示。最后完成甲板直角坐標系到陣面坐標系的變換。
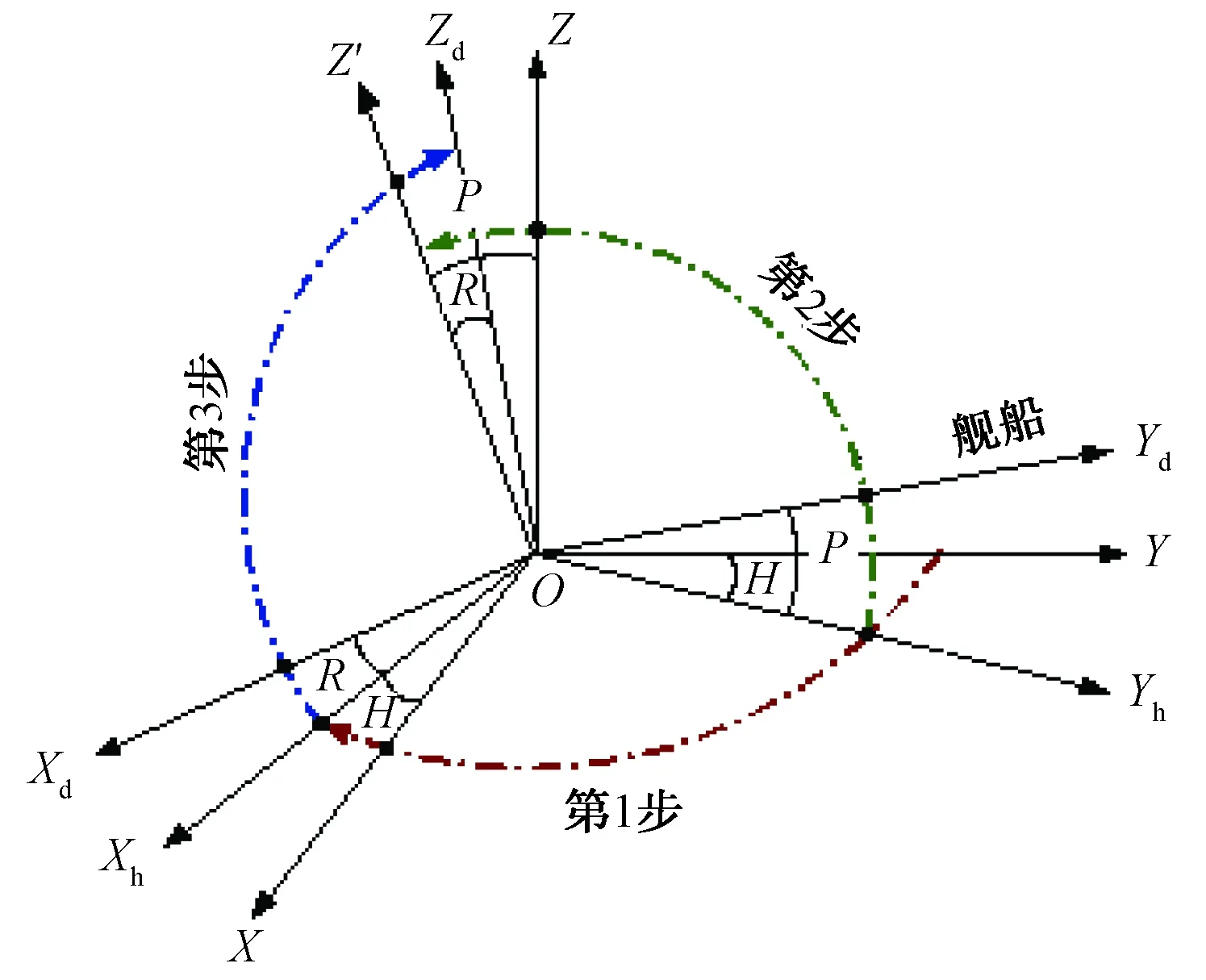
圖2 艦船地理坐標系至甲板坐標系變換
文獻[6]~[9]給出了詳細的推導過程,可得艦船地理坐標與陣面坐標相互轉換的公式為:
MA=TC×TQ×TP×TR×TH×MG
(3)
(4)

3 無縱橫搖時測角仿真
相控陣雷達進行被動超視距探測時,利用了對流層對輻射源信號散射的特性,故接收信號時可認為信號均從大地0°仰角入射。為解決艦船平臺搖擺對被動相控陣雷達接收的影響,對固定陣相控陣雷達,往往采用俯仰寬、方位窄的扇形波束作為接收波束,此時可保證方位測向滿足精度要求,且俯仰寬覆蓋,在艦船搖擺時,保證一定的接收增益。
3.1 方向圖仿真
采用矩形平面陣,包含6行×60列陣元。每行包含60個陣元,每列包含6個陣元,陣元間距離為d=λ/2。方向圖仿真原理公式為[5]:
k(dr2sinθ-β)]}
(5)

考慮到提升波束方向維主副比,仿真時采用了主副比27 dB的泰勒窗。仿真頻率1 GHz時相控陣天線全波位三維方向圖如圖3所示。

圖3 全波位三維方向圖
大地坐標下,1 GHz時相控陣天線全波位水平方向切割方向圖如圖4所示。

圖4 大地坐標系下水平切割方向圖
3.2 比幅曲線獲取
在進行測角前需要預先獲取方位-幅度比值關系表,工程中通常采用暗室實測校準后各波束方向圖計算得到的比值關系表。根據文獻[2]分析結論,本仿真采用大地坐標系俯仰0°對仿真的平面陣方向圖進行等俯仰切割,獲取比幅測角的方位-幅度比值關系K(θ)。陣面坐標下方位-幅度比值關系曲線如圖5所示。

圖5 陣面坐標系下方位-幅度比值曲線圖
3.3 比幅測角
比幅測角過程為:依據信號入射方向,計算不同接收波束接收到信號的幅度,選擇幅度最大的2個波束,計算幅度比值。依據比值查找方位-幅度比值表,獲取入射信號陣面坐標,最后變換到大地坐標系,得到比幅測角結果。
仿真時,設置艦船航向為0°,陣面與艏向夾角為45°,陣面傾角為15°。當艦船平臺縱橫搖均為0°時,信號從大地坐標方位0°~90°、俯仰0°入射,通過仿真得到無縱橫搖時測角誤差曲線如圖6所示。

圖6 無縱橫搖時測角誤差曲線
由圖6可見,無縱橫搖時,采用雙波束比幅測角方法測角誤差較小,仿真誤差主要來源于仿真過程中的量化誤差。
4 不同縱橫搖下測角誤差仿真
坐標轉換過程以及方位-幅度比值關系K(θ)的獲取與前述過程相同。當艦船平臺橫搖為5°、縱搖為1°時,以及橫搖為10°、縱搖為2°時,分別將仿真信號從大地坐標系方位0°~90°、俯仰0°入射,通過仿真得到測角誤差曲線如圖7、圖8所示。由圖7、圖8可見,隨著艦船平臺縱橫搖擺角度增加,測角誤差明顯增大。

圖7 橫搖5°、縱搖1°時測角誤差曲線

圖8 橫搖10°、縱搖2°時測角誤差曲線
5 誤差分析
方位-幅度比值關系K(θ)是在大地坐標系俯仰0°切割獲得的結果,當艦船無縱橫搖時,信號從大地坐標系俯仰0°入射,接收信號幅度-方位比值與K(θ)獲得過程中采用的大地俯仰0°切割相匹配,故此時測角結果比較理想。當艦船有縱橫搖時,大地坐標下位置相同的入射信號變換到陣面坐標后,在陣面坐標中位置發生變化。無縱橫搖時,大地坐標不同方位信號入射時,各接收波束幅度關系見圖9。當有縱橫搖時,假設艦船平臺固定,則入射信號大地坐標俯仰不再是0°。圖10仿真了大地坐標系不同方位信號俯仰8°入射時,各接收波束幅度關系。
由圖9、圖10可見,在波束合成系數未發生變化時,同一個波束、不同仰角方位指向發生了變化,這是由于在陣中扇形波束是彎曲的,如圖11所示。艦船平臺搖擺時接收波束幅度比值發生變化,而幅度比值與方位關系是一一對應的,故測角結果發生變化,進而產生測角誤差。

圖9 無縱橫搖時信號入射各接收波束幅度關系

圖10 有縱橫搖時信號入射各接收波束幅度關系

圖11 彎曲的扇形接收波束
6 結束語
本文首先介紹了測角與坐標變換原理,然后對不同艦船搖擺條件下的固定相控陣雷達扇形接收波束測角誤差進行了仿真和分析。從仿真結果來看,隨著艦船搖擺程度加大,測角誤差也隨之增大。后續工作需要對如何降低平臺搖擺對測角精度的影響進行進一步研究。本文對被動超視距相控陣雷達測角誤差分析提供了有力支持。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
