多廠家AGV相互避碰和交通管制
2020-11-19 02:17:56韓旭
裝備維修技術 2020年10期
韓旭
摘要:伴隨著自動導引小車AGV(Automatic Guided Vehicle)領域內技術的不斷成熟,越來越多的企業將AGV應用在生產實際中。如何使多個廠家AGV在同一車間高效并順暢的運行成為關鍵問題,本文研究的目標就是使多AGV系統具有更快的響應速度、更高的系統效率以及無沖突的運行。
關鍵詞:多廠家AGV;避碰;交通管制
針對當下多AGV調度系統無法滿足獨特的工廠車間環境要求的問題,提出了適用于車間環境的交通管制法,設計了基于交通管制的多AGV調度系統。
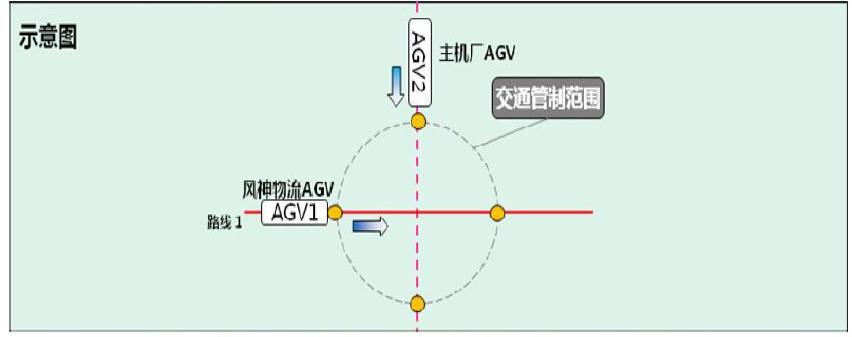
室內交通管理的基礎:如圖,所謂的交通管理就是在兩個AGV運行路線可能產生物理干涉之前將其中的一個AGV停止運行,在另一個AGV通過干涉區域后再放行該AGV。
因而,交通管理的基礎有兩個,一是在交通管制范圍內需要檢測各AGV所處的位置,二是在交通管制范圍外可以管理AGV的停止和啟動。由于AGV之間沒有直接的相互控制能力,所以必須依靠外部的設備來完成交通管理,管理的方式可以使用簡單的信號燈方案(類似于城市道路路口的紅綠燈),也可以使用飛行管理的方案(類似于航空的交通管理),前者為定時放行交通路口,來保證在同一時刻僅能有一個AGV通過路口,后者則在檢測各AGV位置的同時根據優先級放行路口周圍的AGV,管理者就是系統中的AGV控制臺
新松AGV的特點:新松公司的AGV系統采用有控制臺的方案,AGV控制臺可以通過通訊得到系統中每個AGV的位置,并管理每個AGV的運行方式,也就是說新松公司的AGV是可以通過控制臺進行交通管制區域的管理的。
其他廠家AGV的特點:在風神公司的其他廠家的AGV采用無控制臺的方案,也就是說只能針對該AGV進行交通管制范圍內的檢測及啟停管理才能完成交通管制區域的管理。一般情況下AGV均會設計有前方的非接觸式防碰傳感器,可以使AGV在距離障礙物還有一定距離的情況下停止運行,有些AGV會設計有專用的光開關來控制AGV的啟動和停止,有些AGV沒有光開關控制啟動和停止,但會在操作面板上安裝控制啟動停止的按鈕,以實現人工的可操作性,另有一些AGV僅使用單一急停按鈕作為AGV啟停操縱方式。
目的:本方案的目的是實現新松AGV與其他廠家AGV在運行路線有干涉的情況下,管理各交通路口的安全,新松公司可以根據不同特點的AGV提出不同的方案。
1.交通燈管理方案
該方案的主要特點是不需要檢測AGV的位置,類似于城市路口的紅綠燈,使用小型PLC或AGV控制臺均可實現,管理方式是完全使用時間延時,在不同的時間段內分別放行不同方向的AGV,如可以設定每60秒各放行兩路線的AGV一次,這樣可以設定10秒放行信號給路線1,然后關閉放行信號20秒,供AGV保證通過該區域,再打開另一路線的放行信號10秒,然后再關閉放行信號20秒,以保證這個方向的AGV能夠完全通過該區域,完成一個循環,各方向的AGV在到達交通管制范圍邊緣時需要檢測本方向的放行信號,只有放行信號是允許狀態時才能通過。
該方案原理及實現簡單,在不允許放行時,對于新松的AGV只需給新松的AGV控制臺一個信號即可,對于其他廠家的AGV,需要有辦法將其AGV停止,方法與后續方案中涉及的內容相同,后面會有詳細說明。但本方案會在一定程度上影響AGV通過路口的效率,需根據系統的實際效率要求來判斷是否可以使用。
2.飛行管制方案
該方案的主要特點是路口時間利用率高,需要檢測AGV的位置,類似于航空塔臺的管理方式,使用AGV控制臺采集路口附近AGV的位置信息,根據運行的時序、任務及狀態判斷放行的優先級,然后判斷停止哪一個方向的AGV運行,放行其中一個,待先放行的AGV通過后再放行另一個方向的AGV。AGV控制臺通過通訊或線邊傳感器檢測到兩個方向的AGV均運行到交通管制范圍附近,并有進入該區域的需求,AGV控制臺通過信息采集的時間判斷路線1的AGV稍早于另一路線AGV進入該區域,因而判斷路線1AGV優先,則AGV控制臺會通過通訊或線邊設備通知另一路線AGV停止運行,該AGV在得到命令后會停止在干涉區域外,在路線1的AGV通過路口后,AGV控制臺通知另一路線AGV可以運行,則AGV2可以自行通過路口。
該方案的原理清晰,針對新松的AGV來講實現簡單,因為新松的AGV有實際位置的通訊信息及啟停的控制管理,針對其他廠家的AGV,首先要檢測AGV是否到達或離開交通管制區域,在AGV進入和離開交通管制區域的點上需要增加檢測開關,檢測的信息送至新松的AGV控制臺中,如果AGV上有可以發送該信息的開關,可以在兩個位置上增加接收開關,如果AGV上沒有可以發送該信息的開關,則需要在線邊增加AGV通過位置的檢測傳感器,可使用區域掃描傳感器或光開關組來完成該檢測。另外需要對AGV的啟停進行控制,針對不同配置的AGV,控制方案不同,主要有如下幾種。
a.有啟停控制光開關
針對有啟停控制光開關的AGV,可以在控制點處增加相對應的光開關以實現對該種類型AGV的啟停控制。光開關由新松的AGV控制臺完成控制
b.有啟停控制按鈕
針對沒有啟停控制光開關的AGV,如果AGV上有啟停控制按鈕或相對應的IO點,可以在AGV上進行改造,將其IO信號串接(串聯或并聯)到控制光開關回路中,再在控制點處增加相對應的光開關以實現對該種類型AGV的啟停控制。光開關由新松的AGV控制臺完成控制。如果不希望對該型AGV進行改造,可以采用后續的c方案
c.無任何可控制輸入點
如果AGV無任何可控制的輸入點,則可以在地面需控制AGV停止位置旁增加一小型機械裝置,該裝置可以控制一個軟性遮擋物(一般為帶彈性支桿的布板),當需要停止AGV運行時,可將該遮擋物伸出,AGV前方的非接觸防碰傳感器檢測到該物件時會安全停止,當需要放行AGV時,將該遮擋物收回,AGV會自動恢復運行,該裝置可由一簡單氣動或電動的推桿完成控制,因為是帶彈性的軟性材料,即使伸出時AGV或料架已經在伸出的前方,也不會損壞AGV或其他物品,裝置的控制由新松AGV控制臺來完成。
參考文獻:
【1】高瑜,過金超,崔光照. 一種改進的多機器人路徑規劃自適應人工勢場法[J]. 鄭州輕工業學院學報(自然科學版). 2013(06)
【2】過金超,劉征,崔光照. 基于人工免疫網絡理論的移動機器人路徑規劃[J]. 鄭州輕工業學院學報(自然科學版). 2012(04)
【3】劉國棟,曲道奎,張雷.? 機器人.多AGV調度系統中的兩階段動態路徑規劃[J]. 2005(03)
