線陣CCD低仰角測試彈著點適應性分析*
2020-11-11 08:15:18王玉龍張亞輝盧小汐
彈箭與制導學報 2020年3期
王玉龍,張亞輝,盧小汐,張 亮
(中國華陰兵器試驗中心, 陜西華陰 714200)
0 引言
線陣CCD立靶測量系統是一種利用兩臺高速線陣CCD測試火炮彈丸立靶彈著點的測試系統,系統具有測試精度高,連發測試能力強等優點[1-5]。該類測試系統因為測試精度的需要,要求兩臺相機中軸線向上抬高45°,在空中形成一個共同覆蓋區域[6-7],這個區域即是系統測試范圍。當測試系統布置在地面時,所形成的測試范圍常常高出地面數米至十多米,導致靶心距地面過高。如果射擊試驗的火炮按照這個高度進行直瞄射擊,落彈區將會遠遠大于平行地面射擊的情況,使得清場警戒甚至事后瞎火彈銷毀的工作量成倍增大。也正因為以上原因,目前線陣CCD立靶測量系統在兵器試驗靶場很少應用。文中基于線陣CCD立靶測量系統的測量原理,探討了如何降低測試系統測試區域以及因此帶來的目標識別問題,分析了降低測試區域帶來的誤差問題,為測試系統及這種測試技術的廣泛應用奠定了基礎。
1 線陣CCD測量原理
1.1 系統攝像過程
線陣CCD立靶測量采用等待測量方式,以天空為背景。當相對背景為暗目標的彈丸穿越靶面后,在線陣圖像上成像為一小段黑色,這一小段黑色所成像素大小由目標距相機鏡頭的距離決定,如圖1(a)所示。線陣圖像拼接成的二維圖像上形成一個類似彈丸的目標,如圖1(b)所示。
1.2 目標交會計算原理
將兩臺線陣CCD測量站布設在地面上。攝像系統仰角為45°,兩個CCD視場的公共交會區構成空間坐標測量靶面,如圖2(a)所示。當有目標穿過空間靶面時,利用幾何和光學原理,即可求出目標在空間靶面的坐標,如圖2(b)所示。
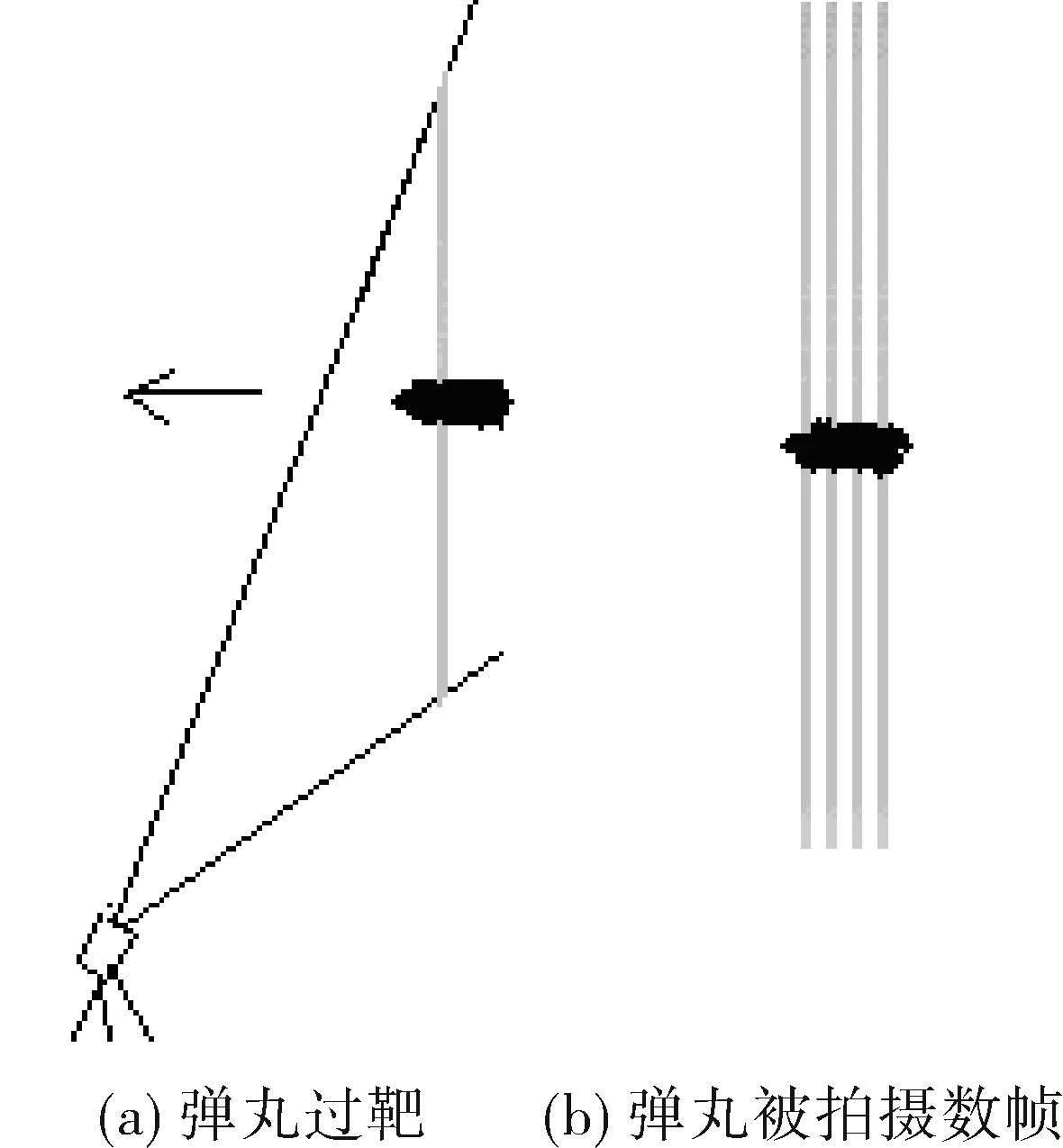
圖1 線陣CCD拍攝過靶彈丸過程
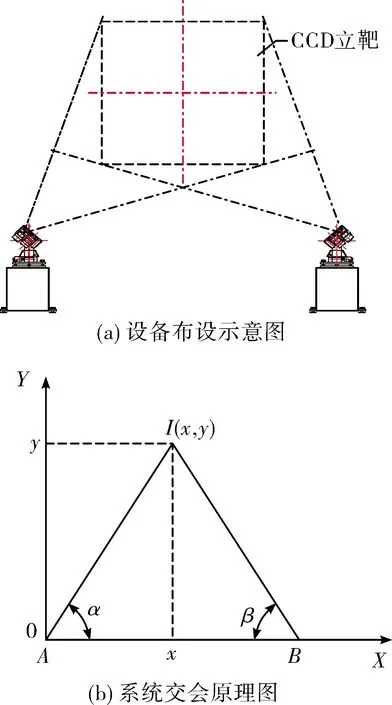
圖2 線陣CCD交會測量示意圖
測量單元分別安裝在A、B兩處,A、B兩點連線稱為基線S,AB=s。若以A點為坐標原點,基線S為X軸,高度方向為Y軸,在視場范圍內,測點A、B的仰角分別為α、β,γ=180-α-β,則被測點I的空間坐標數學表達式為:
(1)
2 低仰角交會靶面參數計算
在線陣CCD立靶測試中,線陣CCD相機視場角為54°,理論上A、B兩臺線陣CCD相機交會的公共區域(如圖3藍色區域)都可以作為測試靶面,但該區域是一塊不規則的靶面,通常情況下都是以一個規則的矩形作為靶面。該區域大小主要受靶面高度L、攝像系統仰角α、基線長度s三個參數的影響,這三個參數互相關聯,只需確定兩個參數,余下一個參數就能確定。
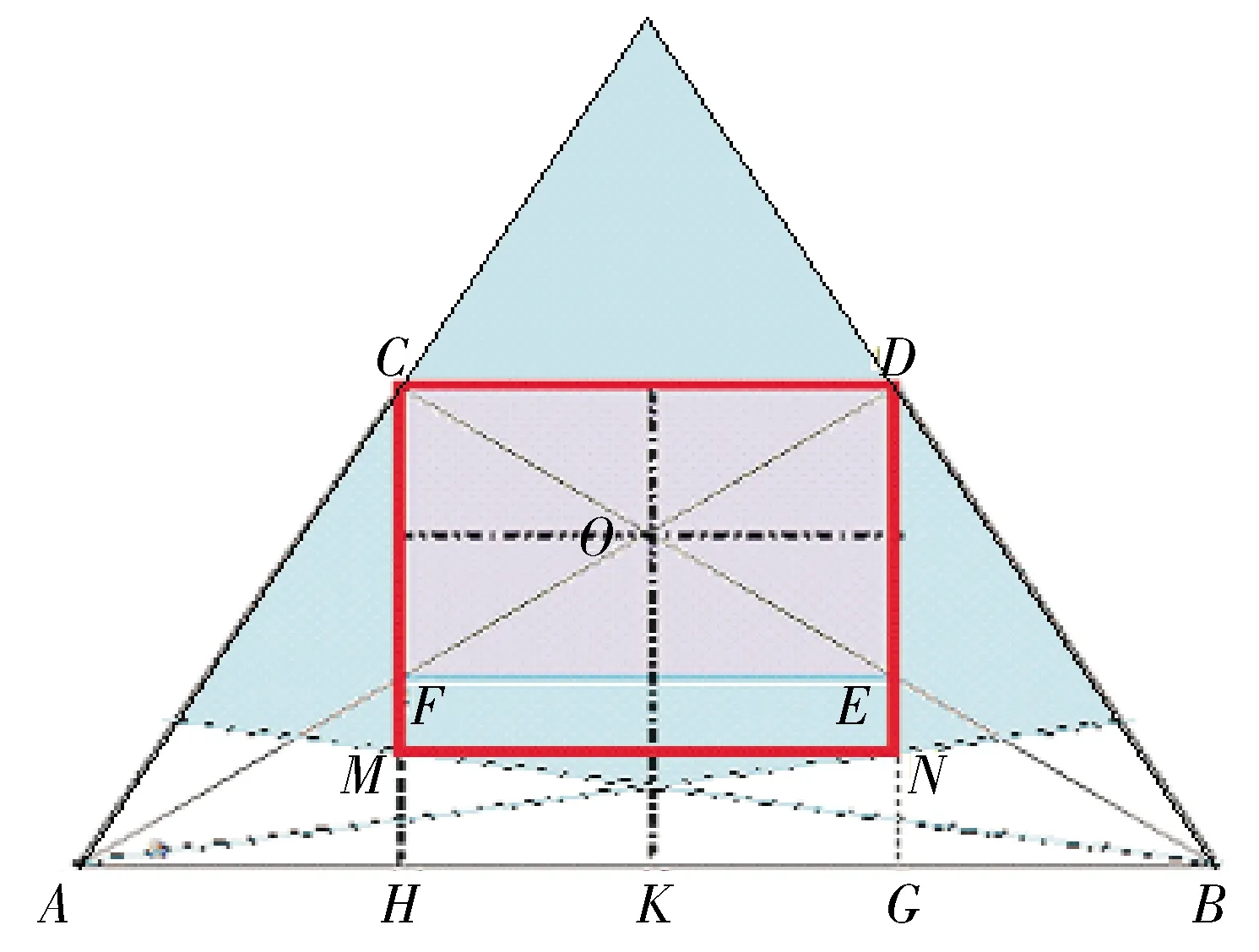
圖3 線陣CCD交會原理圖
為了分析仰角調整后的靶面能夠滿足原靶面的布設要求,需將靶面高度固定,分析仰角變化帶來的靶面寬度、基線長度和靶心高度的變化。設靶面高度DN=L,攝像系統仰角為∠DAB=α,則可確定靶面的相關參數如表1所示。
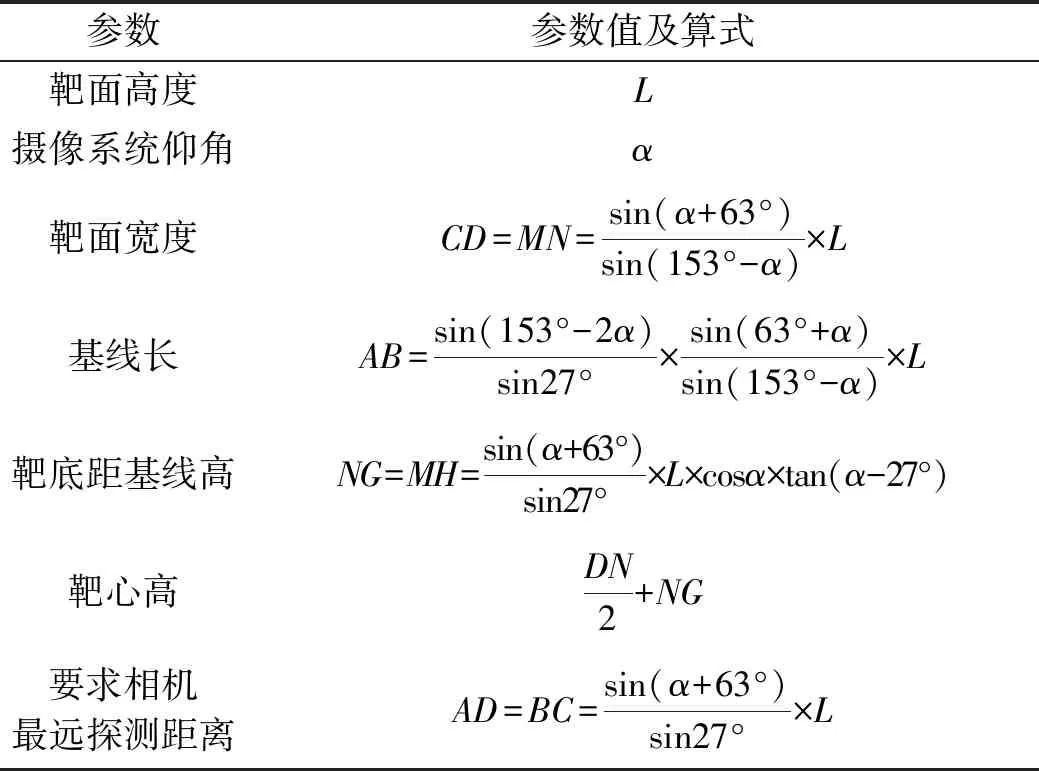
表1 靶面參數
攝像系統最低仰角從28°開始分析,當采用45°仰角交會,測試精度高,但靶心太高,因此主要分析攝像系統仰角在28°~45°區間變化,以此帶來的靶面參數變化。文中重點分析仰角變化后,需滿足試驗10 m×10 m靶面布設要求,帶來的各項參數的變化。
將靶面高度10 m固定,調整基線和攝像系統仰角,分析計算CCD攝像系統仰角在28°~45°區間變化的靶心高和靶面下邊沿距基線高、靶面寬度和最遠探測距離等參數,如表2所示。
表2 布設10 m×10 m靶面不同仰角的靶面參數表 m
圖4 仰角與靶心高和靶底距基線高的參照圖
從滿足試驗靶面10 m×10 m不同的攝像系統仰角分析知:
1)當攝像系統仰角變小時,要滿足試驗10 m×10 m靶面要求,需增加基線的長度,兩臺線陣CCD交會的最大矩形區域由正方形區域變為長方形區域,仰角越小基線越長,靶心距地面的高度越低,但相機的最遠探測距離增加,因此會引起目標識別的變化。
2)要滿足試驗10 m×10 m靶面要求,當用32°仰角交會時,靶心距地面約為6.6 m,比45°仰角交會的靶心高9.8 m低了3.2m,其靶面的下邊沿距地面約為1.6 m,比45°交會的4.8 m低了3.2 m,大幅減少了靶面下邊沿的空白區域,而靶面區域為11.6 m×10 m比10 m×10 m靶面的寬度增加了1.6 m。在立靶試驗中,可根據圖4 中靶心和靶底距基線高的區間指示圖選擇不同的攝像系統仰角,滿足不同立靶試驗要求。
3 低仰角交會目標識別分析
3.1 目標成像像元數計算
目標判別主要依據目標形狀的先驗知識。由相機的視場角54°,CCD像元2 048個,線陣CCD幀頻50 kHz,假若彈丸直徑為D(mm),距離鏡頭R(m),可計算彈丸在鏡頭R距離處,所對應的理論像元數為:
(2)
以23航彈為例,靶面高度10 m時,攝像系統仰角在28°~45°范圍內,按最大角選取相機最遠探測距離Rmax=22.023 m,則目標成像的最小像元數為Nmin≥2.2,即目標在相機成像的最小寬度不小于2.2個像素點。
3.2 過靶成像幀數計算
假定彈長l,彈速v,目標越靶時間t=l/v,相機曝光周期T,則最大曝光幀數為:
(3)
對于靶面寬度10 m成像像元數與過靶成像幀數如表3所示。
表3 典型目標成像特性
對于單個相機而言,對目標進行識別,在相機捕獲率大于98%的條件下,要求目標在相機上成像的像元數不小于3個像元,反之其捕獲率低。
通過降低攝像系統仰角降低靶心的方法,要滿足10 m×10 m靶面要求,需增加基線的長度,則相機的最遠探測距離增加,因此目標成像的像元數與原系統相比會減小,通過表中的數據可看出,對于降低仰角后的10 m靶面,要保持高的捕獲率,只能測試30 mm彈徑以上的彈丸。
4 測量精度分析
4.1 單臺線陣CCD經緯儀理論測角誤差
單臺CCD經緯儀理論測角誤差由經緯儀單次定向誤差、線陣CCD讀數的測角量化誤差和畸變校正誤差組成。
1)經緯儀單次定向誤差
經緯儀進行測回法測角,一測回垂直測角中誤差為±5″,引入視軸晃動誤差(±20″)、垂直軸傾斜誤差(±10″)、測角系統單次測量誤差(±3″)等,則經緯儀的單次定向測角誤差為:
(4)
2)線陣CCD讀數的測角誤差為:
(5)
3)畸變校正誤差
畸變校正誤差主要來源于σ1、σ2和檢測校正的目標光管與檢測架穩定度誤差(±3″),則畸變校正測角誤差為:
(6)
由以上分析可知,CCD經緯儀理論測角誤差σ′為:
(7)
4.2 單臺線陣CCD經緯儀綜合測角誤差
綜合測角誤差系指設備在野外工作,受到風力、溫度、振動、彈丸飛行等影響下的測量誤差。一般情況下,綜合誤差是理論誤差的130%~150%,取值150%,這樣測量單元綜合測角誤差σ為:
σ=1.5σ′=1.5×42.5″=63.75″
(8)
4.3 坐標測量誤差分析
根據前述測量原理及誤差傳遞公式對坐標精度分析如式(9)~式(12)所示。
(9)
(10)
根據誤差獨立原則,均方根誤差為:
(11)
(12)
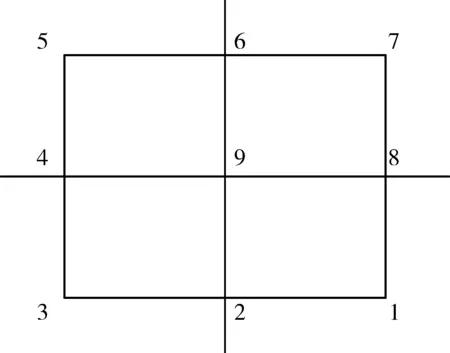
圖5 靶面典型位置分布圖

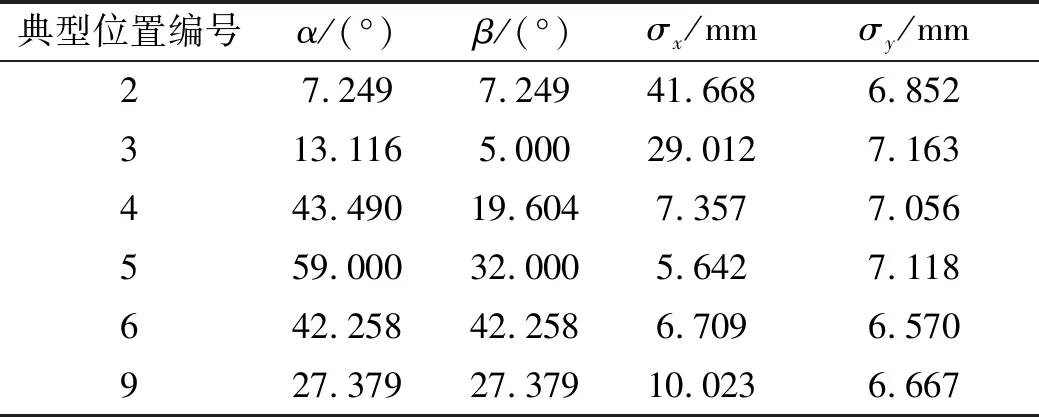
表4 立靶典型位置交會測量誤差表
按上述方法計算,攝像系統仰角從28°~45°變化時,靶面高度10 m,靶面寬度隨仰角變化,可計算其變化范圍為10~12.2 m,表5分析了不同仰角交會靶面的x方向的均方根誤差和y方向的均方根誤差。

表5 線陣CCD不同仰角交會測量均方誤差表
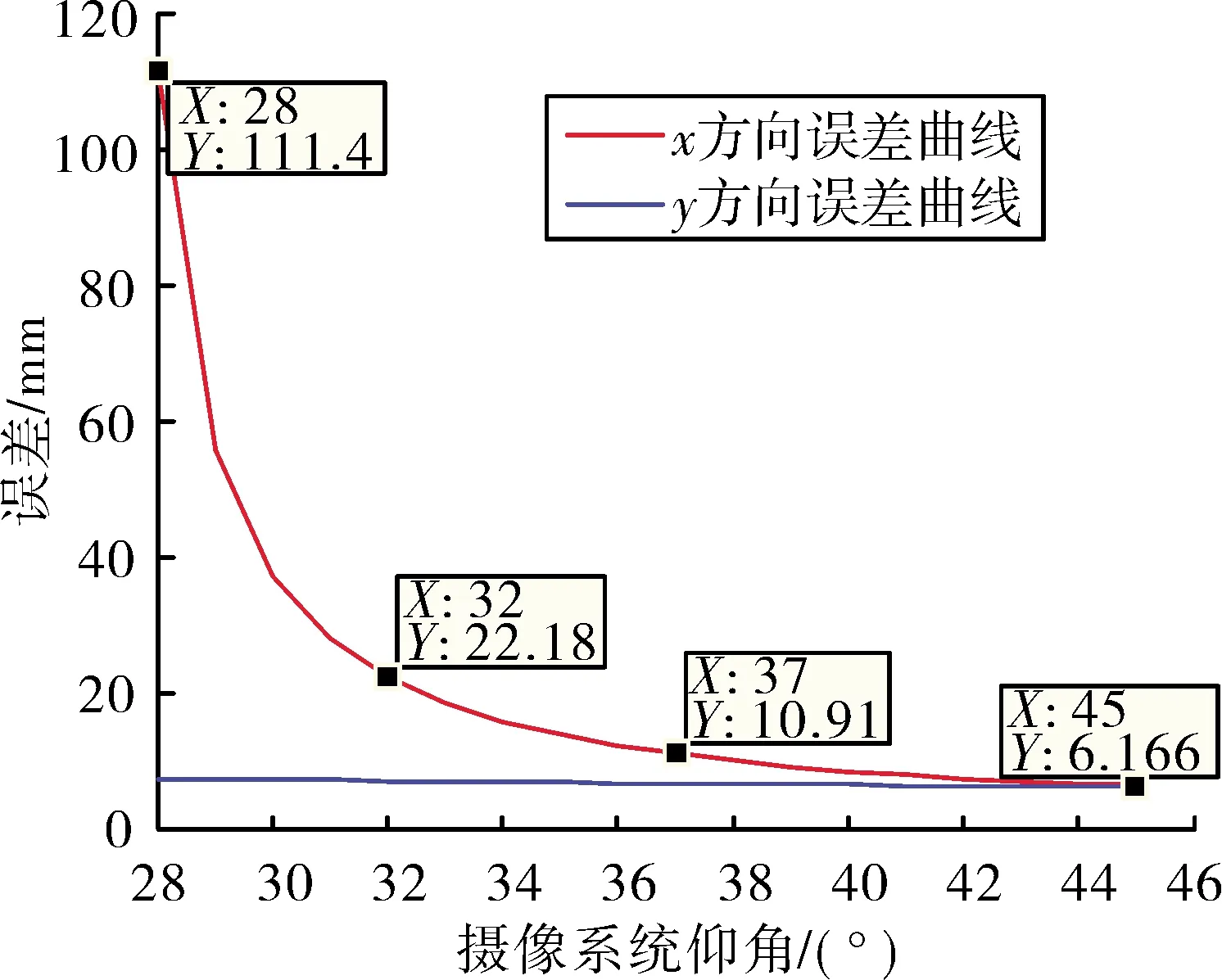
圖6 線陣CCD不同仰角測量誤差變化曲線圖
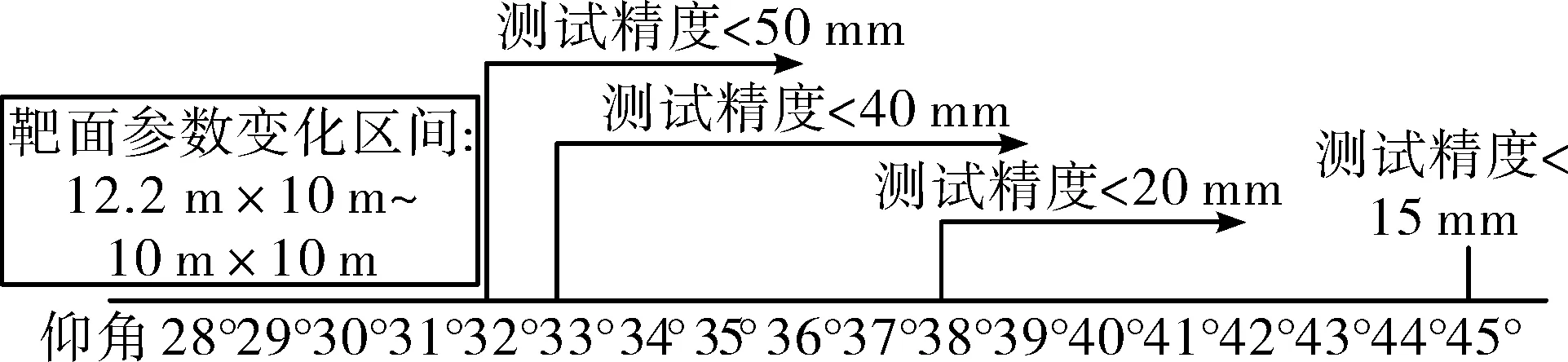
圖7 線陣CCD不同仰角測試精度區間圖
從表5和圖6、圖7中的數據可得出:
1)對于同一靶面寬度,當攝像系統采用45°仰角交會目標時,測試精度最高,隨著仰角的降低,測試精度降低,精度在靶面下沿中心最差,試驗時盡量避免此區域。
2)當線陣CCD攝像系統仰角大于32°時,測試精度優于50 mm;大于33°時,測試精度優于40 mm;大于38°時,測試精度優于20 mm;當攝像系統仰角為45°時,此時系統的測試精度最高,測試精度優于15 mm。
4.4 試驗應用分析
要滿足10 m×10 m立靶試驗的靶面要求,靶面下邊沿距地面的高度要小于3.5 m,測試精度小于50 mm,采用線陣CCD測量。通過前述分析可知,只需選用攝像系統仰角區間為32°~38°進行測量,測試精度優于50 mm,即可滿足試驗要求,圖8是可選用仰角的區間示意圖。表6是線陣CCD典型仰角交會的參數對比表。
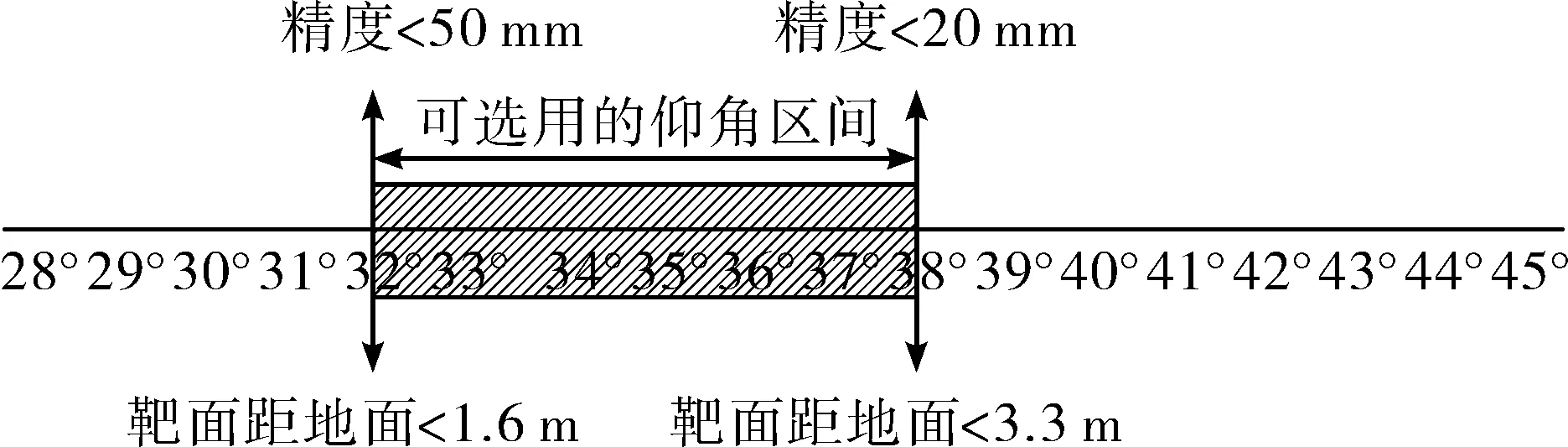
圖8 線陣CCD可選仰角區間示意圖
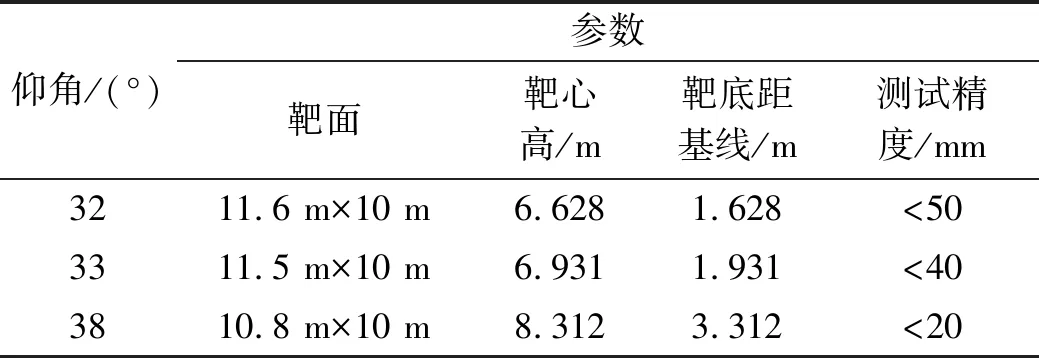
表6 線陣CCD典型仰角交會的參數對比表
5 結論
針對線陣CCD立靶測量系統采用45°仰角交會導致靶心距地面過高,很難滿足立靶坐標測試試驗要求的問題,提出了通過降低攝像系統仰角滿足靶面要求的方法。分析表明:該方法在降低攝像系統仰角的同時其靶心高度和測試精度皆有所降低,不同的攝像系統仰角對應不同的靶心高和測試精度。試驗人員可根據靶面要求和測試精度要求合理選擇攝像系統仰角,以滿足不同試驗需求。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
