基于地磁傳感器的旋轉彈箭滾轉角解算精度分析*
2020-11-11 08:15:44陳勝政王天明
彈箭與制導學報 2020年3期
陳勝政,楊 波,張 意,王天明,楊 靖
(西安現代控制技術研究所, 西安 710065)
0 引言
地磁傳感器具有成本低、抗過載能力強[1-3]、精度適中、算法容易實現等優點,已經成為低成本制導/修正彈箭最主要的滾轉角測量手段[4-5],并在國內外多型低成本制導彈箭上得到應用[6-7]。
滾轉角信號在制導/修正旋轉彈箭的控制系統中承擔著制導信號坐標變換、控制指令分解等重要任務,其解算精度對制導旋轉彈箭的最終命中精度影響較大。文中從地磁傳感器解算滾轉角的基本原理入手,分析并推導出決定滾轉角解算精度的主要因素及誤差方程。并進行了相關仿真分析,為地磁傳感器在旋轉彈箭上的使用提供一定的指導。
1 地磁傳感器測姿原理簡介
1.1 地磁傳感器測姿基本原理
地磁傳感器測姿,是利用旋轉彈箭飛行區域內的地磁場矢量在旋轉彈箭彈體坐標系下的投影分量與地面坐標系下的投影分量之間的坐標轉換關系,來建立起關于3個歐拉角的聯立方程組來進行的。通過對聯立方程組進行變換,分離出滾轉角變量,進而得到關于滾轉角的解析表達式,從而在代入有關參量的條件下,實現滾轉角的實時在線解算。
1.2 地磁場簡介
地磁場同重力場一樣,是一種全球性的基本物理場[8]。地球表面任意一點的地磁場為一個矢量,記為B,強度記為B。下面建立北天東坐標系OXYZ來對地磁場進行描述。OXYZ是以發射點O為原點,以地理北(北向N)、與地理北垂直并指向地心反方向(天向U)以及地理東(東向E)為3個正交軸建立的坐標系。
B在OXYZ坐標下有兩個投影角度,分別為磁傾角I和磁偏角D。磁傾角I為B與北東坐標平面的夾角,指向地心為正,磁偏角D為B在北東坐標平面上的投影與北向的夾角,指北為正。
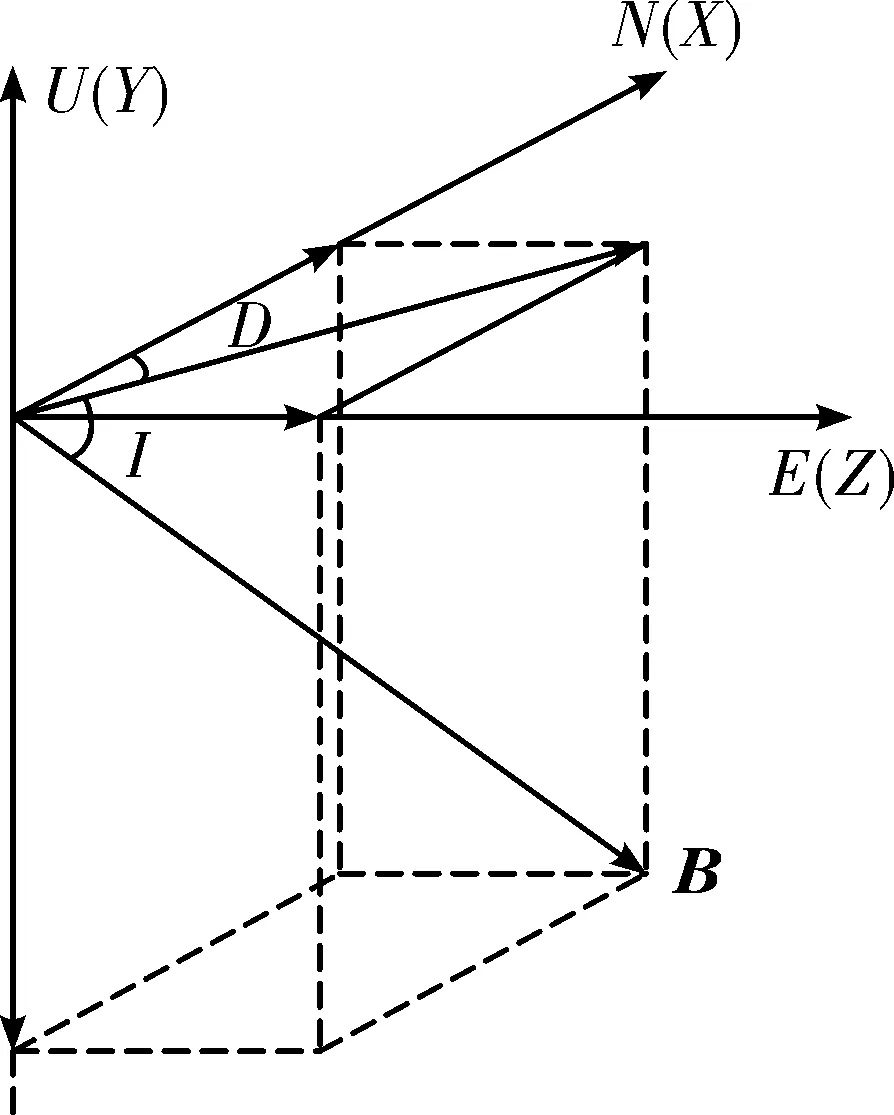
圖1 地磁場矢量示意圖
B與I、D一起,稱為當地的磁場要素,構成對當地磁場矢量的完整描述。磁場要素可通過檢索當地地磁場數據庫或由世界地磁場模型(world magnetic model,WMM)計算得出,也可采用經過計量的三軸磁強計現場測量得到。數據表明,當制導彈藥射程較近時,整個飛行彈道區域內的磁場變化非常微小[9],工程可按B不變來處理,即將B、I、D取固定值。
2 滾轉角解算模型
2.1 地磁矢量的坐標變換關系
分別建立地面坐標系OXgYgZg、準彈體坐標系Ox4y4z4、彈體坐標系Ox1y1z1共3個坐標系。彈體坐標系Ox1y1z1到地面坐標系OXgYgZg的變換關系采用(γ、ψ、?)3個歐拉角來描述。3個歐拉角及坐標系的定義按文獻[10]執行。
北天東坐標系OXYZ與地面坐標系OXgYgZg之間的轉換關系用角度ψs描述。ψs定義為北向角,物理意義是旋轉彈箭射擊方向與北向的夾角,又名射向角。射向在北向以東為正,取值范圍-180°~180°,發射前由靶場測定,為已知量。
根據坐標系定義,得坐標轉換關系見圖2。其中L(*) 表示坐標轉換矩陣。

圖2 坐標系轉換關系
2.2 根據坐標變換關系,建立聯立方程組
將B在北天東坐標系下的投影分別記為BX、BY、BZ,根據B、I、D的定義,得計算公式如式(1):
(1)
B在發射坐標系的投影記為BXs、BYs、BZs。按圖2,計算公式為:
(2)
式(2)即為發射系下的地磁三分量的計算公式。顯然,由于右端所有變量均是發射前已知的,所以BXs、BYs、BZs為已知量。
另一方面,記Bx1、By1、Bz1分別為地磁矢量在彈體坐標系下的三投影分量,則有:

(3)
由于式(3)左邊為已知量,右邊的Bx1、By1、Bz1可由三軸傳感器測出。那么式(3)即是關于3個歐拉角的聯立方程組。
2.3 滾轉角γ解算公式
根據式(3)建立的聯立方程組,進行整理可得滾轉角解算公式:
(4)
若令:
(5)
那么滾轉角γ解算公式可改寫為:
γ=γ1-γ2
(6)
式(6)便是最終的滾轉角計算公式,當前滾轉角γ等于γ1與γ2之差。式中:γ2僅與地磁場矢量在y1軸、z1軸的投影分量Bz1By1相關,在采用分別與Oy1軸、Oz1軸固聯安裝的兩軸地磁傳感器的情形下,輔以一定的濾波算法,可直接計算出γ2。
而γ1是I、D、ψs、?以及ψ共5個變量的函數。I、D、ψs在發射前已知,可以通過裝訂口提前裝訂給彈箭。而?、ψ兩個變量則需要通過其他方法來解算或獲取。
目前,一般有以下兩種方法來獲取?和ψ:一是彈道預估法。通過選擇合理的彈道形式和彈道方案,來保證全程?、ψ規律與理論彈道的一致性,從而為預估創造條件。另一種方法是與衛星定位儀組合,利用衛星定位儀信號來實時估計?、ψ信號。
但是,無論哪種方法,所得到的?、ψ都存在一定的誤差。該誤差會最終疊加到γ1上,引起滾轉角解算誤差[11]。此外,其他3個參數也會帶來一定的誤差。
3 地磁傳感器解算滾轉角精度分析
3.1 γ1項誤差分析及控制
在式(5)中,令:
(7)
那么,γ1計算公式可改寫為如式(8)形式:

(8)
將γ1(?+Δ?,ψ+Δψ,D+ΔD,ψs+Δψs,I+ΔI) 在(?,ψ,D,ψs,I)附近進行泰勒展開,以微分代替差分,并且忽略高階小量,得:
(9)
將γ1的誤差記為Δγ1,那么:
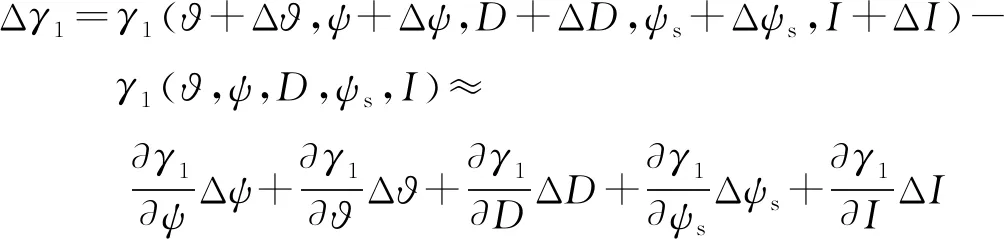
(10)
根據式(7)、式(8)計算,得:
(11)


(12)
由于D、ψs兩個參數是由發射前測定并裝訂的,其誤差ΔD、Δψs遠小于Δψ,因此可以忽略,進而式(12)可進一步簡化為:
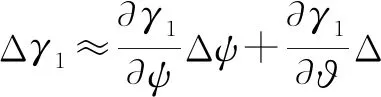
(13)
即Δγ1主要由偏航角誤差Δψ、俯仰角誤差Δ?和磁傾角誤差ΔI引起。
一般來講,旋轉彈箭的偏航角ψ(t)、磁傾角D一般較小,可近似按零處理。照此情形,有:
(14)
因此,可將發散的條件概括為:①射擊方向在正北向或正南向附近;②當前彈道俯仰角接近于負的磁傾角。當①與②兩個條件同時成立時,解算出的滾轉角誤差將會是發散的。下面以在北半球為例進行分析。在北半球射擊時,若沿正北、正南向附近射擊,那么條件①是滿足的。由于當地磁傾角I為正值,那么當旋轉彈箭飛行至彈道降弧段時,條件②很容易構成,從而導致降弧段滾轉角解算精度變差。而對于南半球的情形,當旋轉彈箭在彈道升弧段飛行時,條件②容易構成。
綜合起來看,對于旋轉彈箭不同的飛行段,條件②都是可能構成的。而條件①僅與射向相關,那么通過選擇射向,是可以規避條件①,從而避免滾轉角發散的問題。
3.2 γ1項誤差仿真分析
由3.1節的分析可見,當旋轉彈箭沿正北向或正南向附近射擊時,采用地磁傳感器解算的滾轉角存在發散的可能,導致地磁測姿方案不可用[11]。
但是,根據式(7),當射向從正北、正南方向逐漸偏離后,A逐漸增加,A2+C2逐漸變大,單位角度(俯仰角、偏航角、磁傾角等)誤差引起的滾轉誤差逐漸變小,滾轉誤差收斂,滾轉角解算精度變高。
因此,需要在全彈道俯仰角范圍內,針對不同的射向,仿真分析俯仰角誤差、偏航角誤差、磁傾角與滾轉角誤差的傳遞關系,通過將滾轉角誤差限制在控制系統可承受范圍內,來確認地磁的可用區域,從而為地磁的使用或指標分解提供依據[12]。
仿真計算條件為:
磁傾:40.5°
磁偏: 0°
北向角ψs: 0°~-90°
俯仰角誤差: 取固定值3°
偏航角誤差:取固定值3°
磁傾角誤差:取固定值0.3°
容許的最大滾轉誤差:10°
3°偏航角誤差引起的滾轉角誤差仿真結果分別見圖3~圖5。滾轉誤差超過10°時,按10°繪制曲線,以下同。
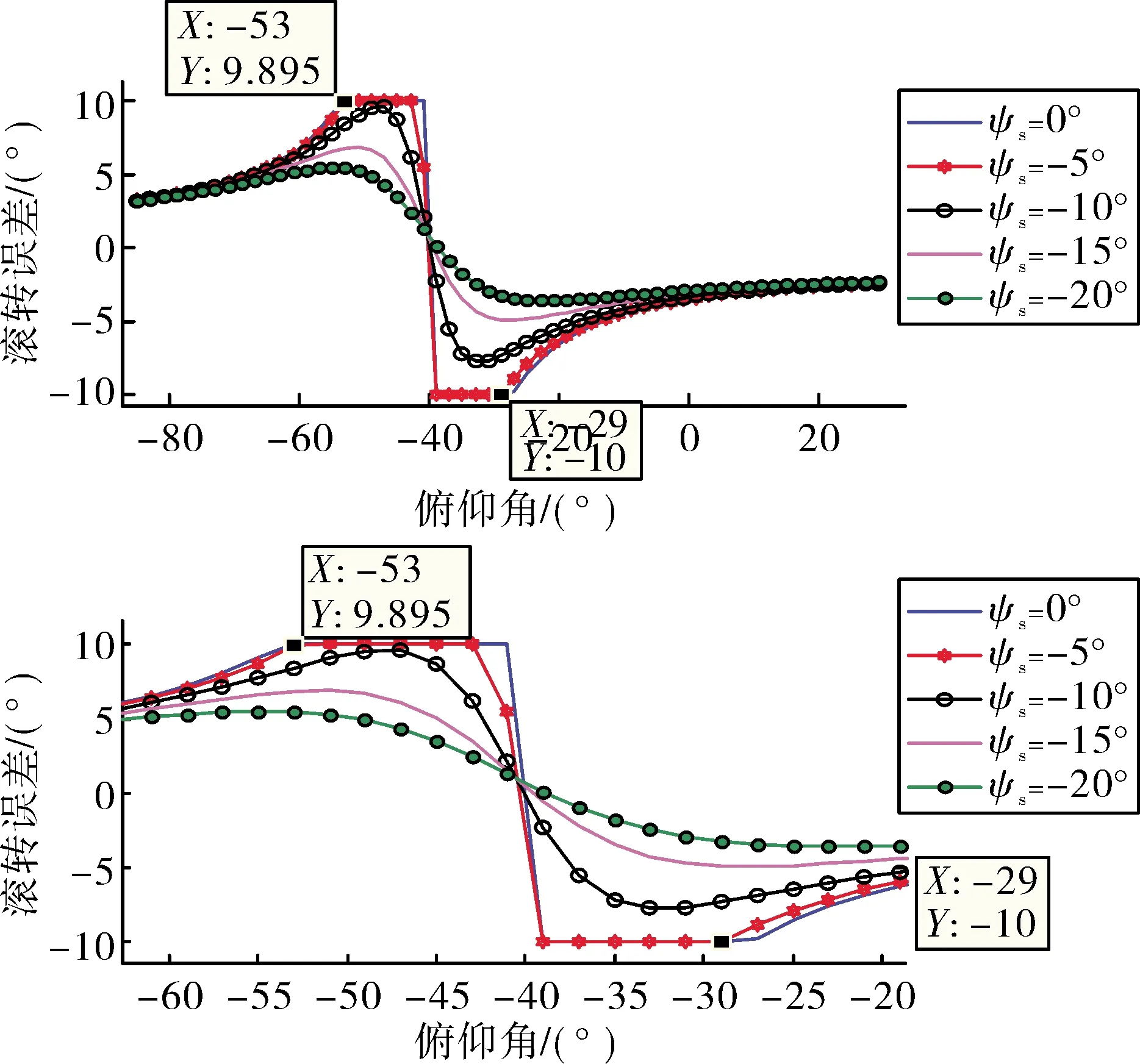
圖3 0°~-20°射向,3°偏航角誤差引起的滾轉角誤差
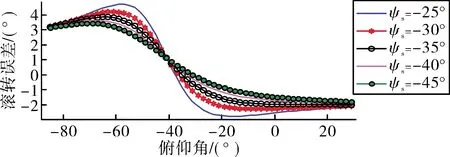
圖4 -25°~-45°射向,3°偏航角誤差引起的滾轉誤差
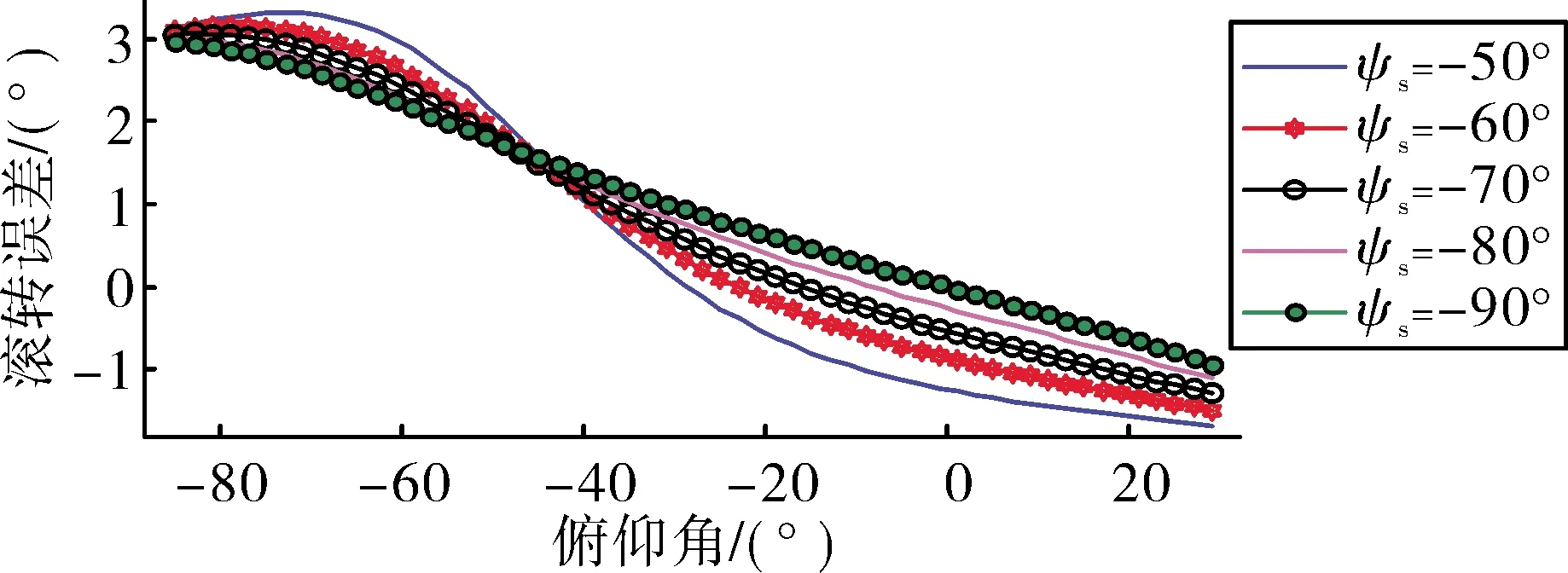
圖5 -50°~-90°射向,3°偏航角誤差引起的滾轉誤差
3°俯仰角誤差引起的滾轉角誤差仿真結果分別見圖6~圖8。

圖6 0°~-20°射向,3°俯仰角誤差引起的滾轉誤差
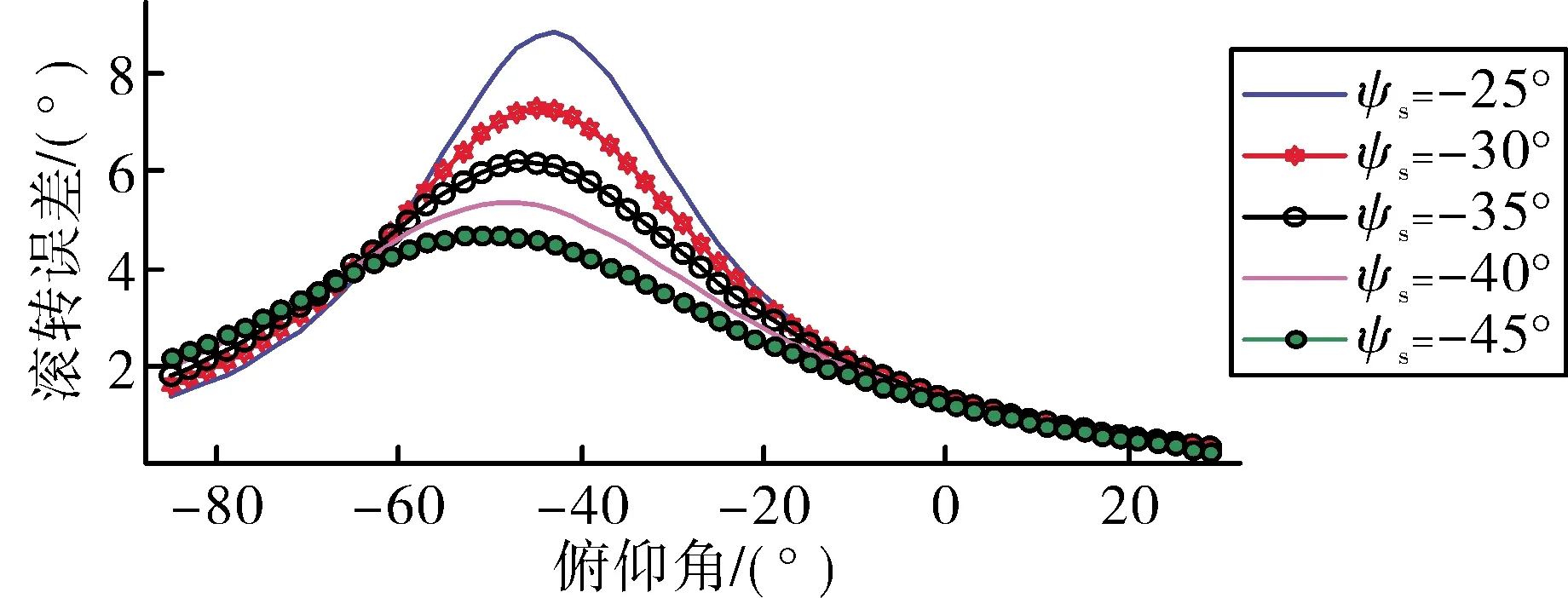
圖7 -25°~-45°射向,3°俯仰角誤差引起的滾轉誤差
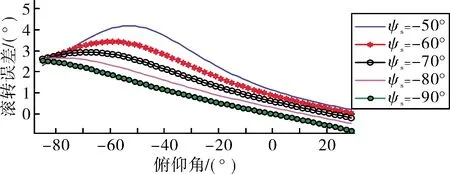
圖8 -50°~-90°射向,3°俯仰角誤差引起的滾轉誤差
0.3°磁傾角誤差引起的滾轉角誤差仿真結果分別見圖9~圖10。
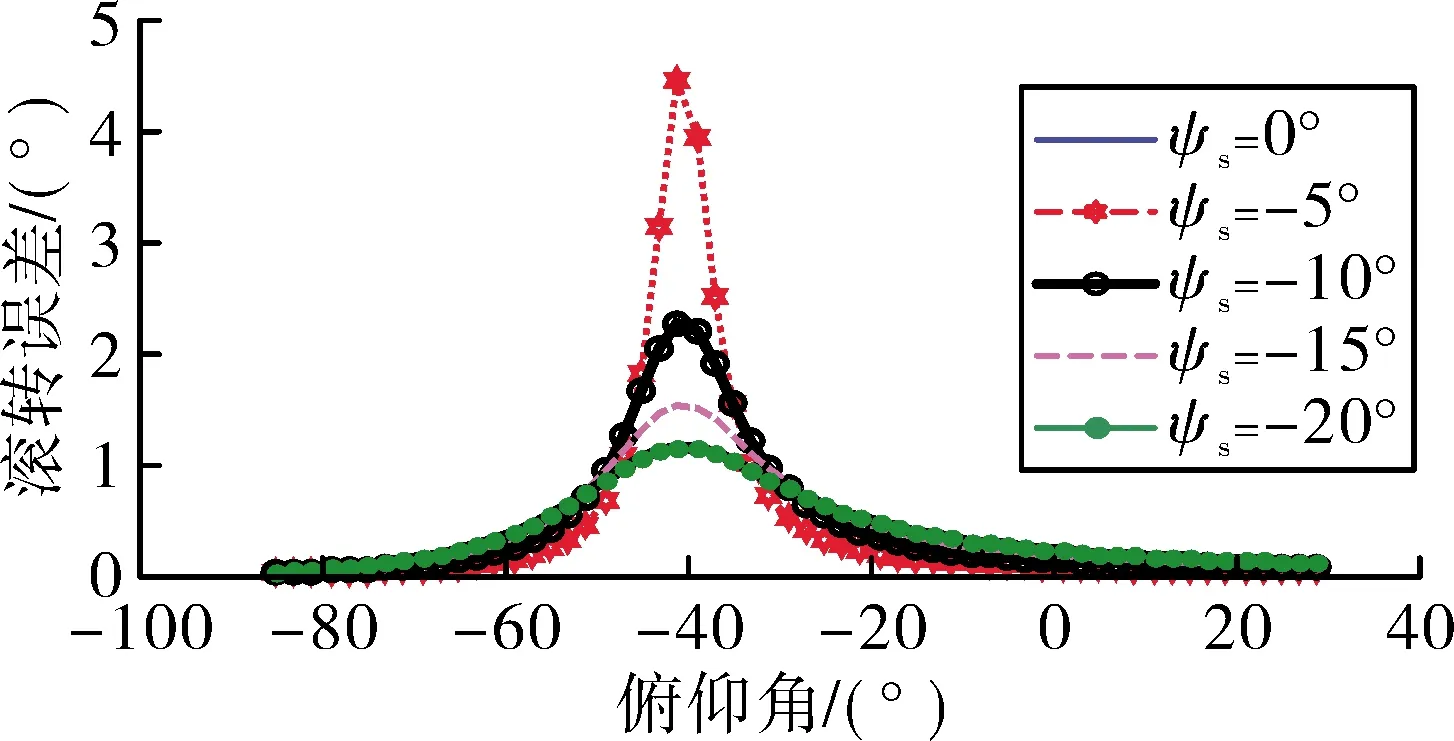
圖9 0°~-20°射向,0.3°磁傾角誤差引起的滾轉角誤差
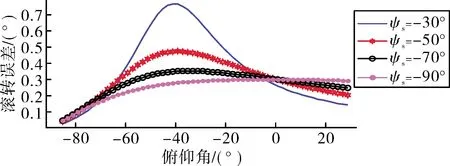
圖10 -30°~-90°射向,0.3°磁傾角誤差引起的滾轉誤差
由仿真結果可見:
1) 由圖3~圖5可見,隨著射向角的增加(往負向增加),3°偏航角誤差帶來的滾轉角誤差(絕對值)逐漸減小。其中,當射向角處于0°~-10°范圍內,俯仰角在-53°~-29°范圍內,滾轉角誤差(絕對值)超過10°,地磁測姿方案在此范圍內不可用。
2)由圖6~圖8可見,3°俯仰角誤差帶來的滾轉角誤差(絕對值)整體趨勢也是隨射向角的增加而減小的。且,僅當射向角超過-20°時,3°俯仰角誤差帶來的滾轉角誤差才全部減小到10°以內。但由于射向角處于-15°~-20°區間,僅一小段彈道傾角范圍(-50°~-35°)內的滾轉角誤差超過10°,若能夠進一步提高俯仰角的估算精度,那么可將不可用的射向角范圍縮減到0°~-15°。
3)由圖5、圖7、圖8可見,當射向角超過-35°時,3°偏航角誤差帶來的滾轉角誤差均小于4°,而3°俯仰角誤差帶來的滾轉角誤差均不大于6°。說明在該射向范圍,采用地磁傳感器解算滾轉角的方法對偏航角、俯仰角誤差的容忍能力較強。且隨著射向角逐漸逼近-90°(相當于沿地理西向射擊),3°俯仰角和3°偏航角帶來的滾轉誤差達到最小,說明該射向最有利。
4)由圖9、圖10可見,0.3°磁傾角誤差引起的滾轉誤差僅僅在俯仰角處于-40°,射向不大于-10°的局部區域內有大值出現。而如果射向大于-10°,0.3°磁傾角誤差引起的滾轉誤差幾乎可以忽略。
5)由此可見,為了保證旋轉制導彈箭的命中精度,射表中應對射向角范圍作出明確規定,作戰時選擇有利的射擊方向,盡量避免向正北向附近射擊,射向角至少應大于-15°。同樣的分析,對于0°~90°的射向應有同樣的規律。綜合起來講, -15°~15°的射向應算作不可用射向。
6)總的來講,按北半球射擊考慮,最佳射向角應選在35°~90°區間或-35°~-90°,通過為控制系統提供高精度的滾轉角信號,從而保證命中精度。
3.3 γ2項誤差Δγ2分析
根據γ2的計算公式,當彈軸矢量與地磁矢量接近平行時,Bz1、By1均為小量,導致γ2的計算精度變差。根據實際使用經驗,通過對傳感器進行標定并消除彈上電磁干擾后,僅僅當射向角小于10°時,γ2的精度會比較差。而射向角大于10°的情形,γ2的精度基本都能處在一個比較穩定的水平。
3.4 滾轉角綜合誤差Δγ分析
滾轉角綜合誤差 Δγ=Δγ1+Δγ2。
根據3.1、3.2節的分析,滾轉角誤差主要取決于Δγ1。當將射向選擇在15°以外時,綜合滾轉角誤差最大值不大于20°(單獨俯仰角或偏航角引起的最大滾轉誤差各10°,磁傾角引起的誤差可以忽略),初步的控制系統仿真表明,在該滾轉角誤差條件下,制導旋轉彈箭仍能保證命中,說明滾轉角精度能夠滿足控制系統的要求。
而當射向角處于15°以內時,由于滾轉角精度變差,誤差達到20°以上,導致地磁測姿方案不可用。
由此可見,采用地磁傳感器測量滾轉角時,需要對射向進行限制,使得彈箭的作戰使用受到一定的限制[13-14]。
4 結論
文中建立了滾轉解算模型、誤差傳遞模型,對一定的俯仰角誤差、偏航角誤差、磁傾角誤差等誤差因素引起的滾轉角誤差進行了仿真分析。仿真分析表明,在同等誤差水平、不同北向角條件下,地磁解算精度與北向角即射向密切相關,當射向偏離北向15°以上時,滾轉角解算精度可達到20°以內,且隨著射向角增加,滾轉角解算精度越來越高。這可為地磁傳感器在彈箭滾轉角解算中的使用提供一定的參考與指導。
