高超聲速導彈進氣道整流罩分離氣動特性研究*
2020-11-11 08:15:38龐川博向玉偉馬興普蔣勝矩
彈箭與制導學報 2020年3期
龐川博,向玉偉,馬興普,蔣勝矩
(西安現(xiàn)代控制技術研究所, 西安 710065)
0 引言
高超聲速巡航類武器通常在進氣道入口前安裝整流罩以達到減阻及熱防護的作用。助推級工作結束后,需要將整流罩從彈身拋離,當飛行高度較低時,不能忽略氣動力在分離過程中的作用,準確模擬拋罩分離過程、分析并認識其中流場的變化對于分離方案設計、安全性評估以及彈體受擾動分析有著重要參考意義。目前常用的整流罩分離手段有側推和旋拋兩種方式[1],前者主要依靠外部沖量或作動器行程強制罩體與彈身間產(chǎn)生相對位移,并在慣性的作用下進一步遠離彈體,對氣動力依賴較小,適用面較廣,分離安全裕度大,但存在使用、裝配、貯存成本高,分離時對彈體沖擊大等缺點;旋拋式分離,即鉸鏈式翻轉分離,在整流罩末端使用鉸鏈轉軸與彈體相連,分離開始時使用低沖擊的分離螺栓或線切割手段使罩體與彈身分開,然后在氣動力作用下繞固定鉸鏈軸轉動,經(jīng)過一定角度后鉸鏈軸解鎖,整流罩在來流和慣性共同作用下遠離彈體。旋拋分離具有分離時初始擾動小,分離結構簡單,分離設計參數(shù)清晰等優(yōu)點,但對分離條件的選擇要求較高。
由于多體分離問題的試驗條件與模型設計相當苛刻[2],早在20世紀80年代初,美國使用計算得到的氣動力數(shù)據(jù)對分離過程軌跡進行了模擬,結果表明相較CTS試驗,計算結果更加接近實際飛行試驗的彈道[3],之后更多針對多體分離問題的數(shù)值模擬研究得到開展。在90年代后,嵌套網(wǎng)格技術廣泛運用于多體復雜外形的流場計算,隨著計算機硬件進一步發(fā)展,動態(tài)嵌套網(wǎng)格技術運用于非定常流場數(shù)值模擬成為可能,國外學者采用動態(tài)嵌套網(wǎng)格技術對副油箱投放[4-5]、彈射座椅運動軌跡[6]以及導彈發(fā)射[7]等過程進行了一系列研究。李孝偉[8]、張玉東[9]等人也針對投放、子母彈分離動態(tài)過程進行了數(shù)值模擬并取得了較好成果。近年來郭正、劉君等對網(wǎng)格變形與局部重構技術開展了研究[10-11],并對超聲速飛行器頭罩平拋對稱分離以及子母彈拋殼過程進行了數(shù)值模擬[2,12],有效避免了嵌套網(wǎng)格區(qū)塊間頻繁插值引起的誤差積累,但也存在邊界層網(wǎng)格難以處理以及僅適用于求解歐拉方程等問題。以上研究的分離問題基本以平拋為主,物體間不存在約束作用,對于采用旋拋式分離含有鉸鏈連接的整流罩,由Toniolo等提出了CFE方法來求解多個剛體間的約束載荷[13-14],Oh[15]、Tartabini[16]分別對多體分離進行了仿真,并對物體間約束力進行了分析;張科南等提出了一種多體分離仿真的綜合建模方法,結合CFE方法與CFD手段解決該類問題中氣動力、約束力與飛行力學耦合計算問題[17];李慧通等人對導彈底罩拋離過程開展了建模與分析,并對物體間鉸鏈約束力采用了CFE方法進行求解[1]。上述研究中均采用靜態(tài)風洞試驗或定常數(shù)值計算所得到的氣動數(shù)據(jù)庫,對于存在大分離、強間斷特性的高超聲速流場,其仿真結果存在較大誤差且無法考慮物體間顯著的氣動干擾。文中采用動態(tài)嵌套網(wǎng)格結合CFE方法,對整流罩旋轉拋離過程進行動態(tài)非定常CFD數(shù)值模擬,在充分考慮流場非定常特性與氣動干擾的基礎上,對分離過程的安全性以及彈身的擾動特性展開討論。
1 數(shù)值模擬方法
1.1 控制方程
將三維非定常可壓縮N-S方程寫為:
(1)
式中:Ω為控制體,?Ω為單位控制體邊界表面積,n為積分面的單位法向矢量;Q為守恒形式的狀態(tài)變量,F(xiàn)(Q)與G(Q)分別為對流項通量與粘性項通量。拋罩分離過程計算周期較長,且運動過程中出現(xiàn)有較明顯的流動分離現(xiàn)象,為了兼顧計算量與計算精度,文中仍采用Menterk-ωSST湍流模型,其具體構造與特性見文獻[18]。
1.2 約束力計算
整流罩與彈身處于鉸鏈約束狀態(tài)時, 彈體同時受到氣動載荷與鉸鏈轉軸處傳遞的集中力作用。此時軸的運動軌跡與彈體的位移以及角位移相關,與罩體的平動軌跡一致,而罩體的轉動運動則是與氣動載荷和約束力相關;故在約束階段運動模擬中既要考慮非定常氣動載荷,也要考慮彈身與罩體間相對姿態(tài)的變化以及受力的傳遞。假設罩體受合力矩為Mf,慣性矩張量矩陣為Lf,轉動角速度為ωf,在非慣性系下,其轉動動力學方程可寫作:
(2)
在鉸鏈連接階段,罩體自身僅具有俯仰方向的自由度(另外兩個方向上的轉動屬于隨彈身的牽連運動),其合俯仰力矩與角速度關系為:
(3)
式中:Mzf為罩體受到的合俯仰力矩,在彈身質(zhì)量與慣性矩遠大于罩體時,其合俯仰力矩可近似看作氣動載荷作繞轉軸參考點的俯仰力矩,即Mzf≈Mzfaero。
將罩體視為質(zhì)點,將角運動寫成慣性力形式,得到其受力情況如圖1所示。
圖1 約束階段罩體受力示意圖
圖1中Ftr與Ftn為等效罩體作繞軸轉動的慣性力,由其法向加速度與切向加速度引起,寫作:
(4)
式中負號僅表示慣性力與加速度方向相反。引入慣性力后,罩體受力滿足如式(5)所示關系。
(5)
通過非定常數(shù)值計算求解得罩體在當前時刻氣動力分量與角位移,聯(lián)立式(3)、式(4)、式(5)求得鉸鏈軸作用在罩體上的約束力在xy平面內(nèi)的分量Fxres1與Fyres1,再由作用力與反作用力關系,可以得到彈身受到從鉸鏈轉軸傳遞的力Fmres與相應力矩Mmres。在約束運動階段,彈身受合力與力矩可寫作:
(6)
最終求解步驟為:首先在不考慮約束力作用下求解當前時刻非定常流場,得到彈身與罩體氣動載荷、姿態(tài)與位移,再通過CFE方法得到此時的約束力,最后將約束力與約束力矩作為外部施加力/力矩再次計算當前時刻的非定常流場,得到當前時刻考慮約束力作用的流場與彈身姿態(tài)結果。計算過程類似于“初步計算-校正-再次計算”的形式,有效考慮了約束力對彈身姿態(tài)的影響。
2 分離方案設計
收到分離信號后,分離機構解鎖啟動,為了保護進氣道前壓縮面同時減小對彈身的擾動,所采用分離機構產(chǎn)生的沖量不宜過大,此時主要依靠氣動力帶動罩體轉動離開彈身,在整流罩外形設計時除了考慮減阻需求外,還需要其能夠產(chǎn)生一定分離力矩,確保罩體能夠在一定攻角范圍內(nèi)安全、快速地轉動張開。可以通過在罩體前迎風面進行非對稱斜切或是在罩體與彈身之間預留出盲腔來達到產(chǎn)生分離力矩的目的。
罩體轉軸的解鎖角度在分離方案設計中十分重要。當鉸鏈軸達到指定解鎖角度斷開后,罩體當前的角速度與姿態(tài)對后續(xù)的運動軌跡以及姿態(tài)變化有較大影響。解鎖角度過小,罩體遠離彈身需要更長的時間,解鎖角度過大,則罩體可能出現(xiàn)翻轉,與彈身發(fā)生碰撞的概率增大。為了避免翻轉,除了合理設計轉軸的解鎖角度,小罩自身也需要具有一定穩(wěn)定性。考慮到罩體張開后攻角較大,背風區(qū)域流動分離顯著,激波干擾強烈,不能僅依靠定常計算手段來預測罩體焦點的變化規(guī)律,還需要采用非定常計算來進一步預測分離過程中罩體實際姿態(tài)的變化。在助推級火箭發(fā)動機工作時,整流罩作為彈身重要減阻部件,其迎風面外形的設計與優(yōu)化工作往往是圍繞減阻與熱防護所展開,針對分離特性的幾何外形優(yōu)化有限,主要通過調(diào)整罩體自身質(zhì)量分布來保證穩(wěn)定性。與全彈相比,整流罩質(zhì)量極小,在保證結構強度以及熱防護措施的基礎上,可以通過內(nèi)部結構設計來合理布置罩體質(zhì)心的位置,使其具備足夠穩(wěn)定性,確保分離中罩體始終遠離彈身且不發(fā)生翻轉。
3 計算結果分析
3.1 計算外形與條件
高超聲速導彈頭部及進氣道整流罩外形通常由不規(guī)則的復雜曲面構成,采用非結構網(wǎng)格進行空間離散可以較好還原其外形,同時嵌套網(wǎng)格可以描述多個物體間相對運動。為避免接觸干涉,略去轉軸處的幾何特征,罩體附近面網(wǎng)格如圖2。
彈身下方為整流罩掉落時途經(jīng)區(qū)域,也是文中著重關注的流場區(qū)域。將彈身下方3×1.5×7區(qū)域加密至與整流罩貼體網(wǎng)格同一密度以保證嵌套網(wǎng)格間插值精度,同時也有利于提高當?shù)亓鲌龇直媛剩o出空間網(wǎng)格分布如圖3所示,計算參考系x方向從彈頭指向彈尾,y方向向上。通過計算罩體運動過程,觀察其軌跡與姿態(tài)可以對分離安全性進行評估;罩體以不同姿態(tài)位于彈身不同位置時,其對彈身姿態(tài)的擾動也不同。來流條件取Ma=6,Re=11.1×106,α=0°,β=0°,整流罩取不同質(zhì)心(即不同靜穩(wěn)定度)與不同旋拋解鎖角度條件進行數(shù)值計算,并就安全性與擾動特性展開討論。
圖2 罩體附近表面網(wǎng)格
圖3 彈身下方網(wǎng)格加密示意圖
3.2 安全性分析
由于彈體質(zhì)量遠大于整流罩,在約束轉動過程中轉軸處結構傳力基本不影響罩體的運動。在整流罩轉動張開過程中,不同條件下運動姿態(tài)與受力情況變化較小,主要差別集中在轉動約束解除后的六自由度運動過程。通過對整流罩單獨進行定常計算,得知其自身焦點隨攻角變化有如圖4所示規(guī)律。
圖4 整流罩焦點隨攻角分布曲線
此處僅參考定常結果中焦點在小攻角時相對靠前且隨攻角增大后移的特性,分別將質(zhì)心布置于罩體沿彈軸方向的30%位置與60%位置(后文統(tǒng)一簡稱為30%質(zhì)心工況與60%質(zhì)心工況),分別對應較大穩(wěn)定度狀態(tài)與小攻角時靜不穩(wěn)定/中立穩(wěn)定狀態(tài),同時設定轉軸約束解鎖角度為45°,通過計算,給出兩種不同質(zhì)心的整流罩掉落軌跡如圖5所示。
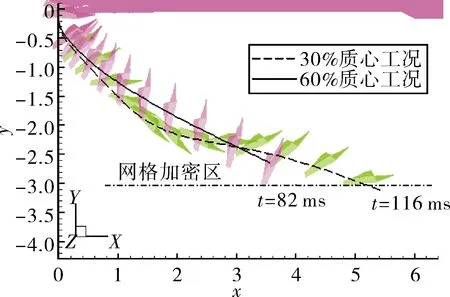
圖5 整流罩掉落軌跡
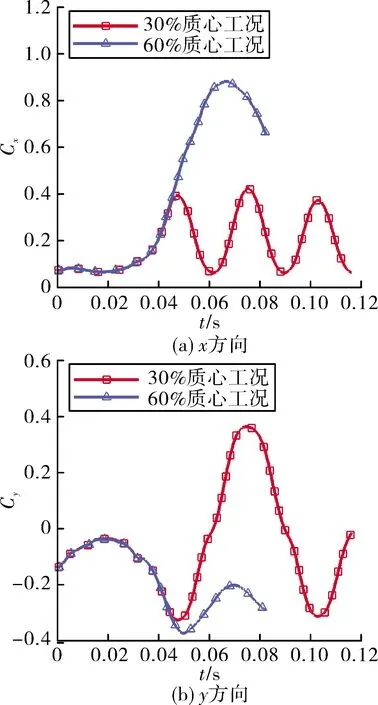
圖6 整流罩氣動力隨時間變化
作圖時略去了轉軸約束放開前的大部分狀態(tài),在六自由度運動中,兩種工況的掉落軌跡均向下遠離彈身,接觸到加密區(qū)域邊界后計算停止。60%質(zhì)心工況在t=82 ms時刻運動至加密區(qū)域下邊界,耗時較短,下落速度更快,下落過程中姿態(tài)改變量較小;30%質(zhì)心工況在下落過程中由于較大的恢復力矩作用,姿態(tài)上出現(xiàn)明顯的俯仰運動。圖6給出整流罩受氣動力系數(shù)隨時間的變化曲線,從圖中可知,60%質(zhì)心工況在x方向受力更大,飛離彈尾所需時間更短;而30%質(zhì)心工況罩體在x方向受到周期變化的力的作用,與其姿態(tài)變化相對應。沿罩體下落方向, 30%質(zhì)心工況在62~90 ms間所受y向力為正值,從圖5中也可看出在這段時間內(nèi)罩體相對來流的攻角為正,此時加速度方向指向彈身,對分離安全性不利;對于60%質(zhì)心工況,Cy始終為負,具有更好的分離安全性。
60%質(zhì)心工況分離階段耗時更短且安全性更高,考慮到其運動特性與當前姿態(tài)直接相關,給出罩體俯仰方向姿態(tài)角的變化如圖7所示。從圖中曲線可知,30%質(zhì)心工況整流罩在轉軸解鎖后,其姿態(tài)角能夠達到的正向最大值約為50°(沿低頭張開方向為正),此時角速度變?yōu)榱悖貜土厥拐煮w由低頭姿態(tài)轉為抬頭姿態(tài),Cy由負變?yōu)檎趹T性作用下,姿態(tài)角繼續(xù)增大至負向最大值-39°,然后角速度減小至零,在氣動恢復力矩作用下進入下一個運動周期。對于60%質(zhì)心工況,盡管計算結束較早,姿態(tài)尚未完成一個周期的變化,但從曲線可知其運動周期更長,變化頻率更低;由于質(zhì)心布置更靠后,相同攻角下受到的氣動恢復力矩更小,抵消角運動的慣性所需時間更長,故整流罩長期處于負攻角狀態(tài),受氣動力方向始終遠離彈身,同時更大的俯仰姿態(tài)角使得其氣動阻力也更大(即圖6中Cx),向后運動過彈尾所需時間更短。
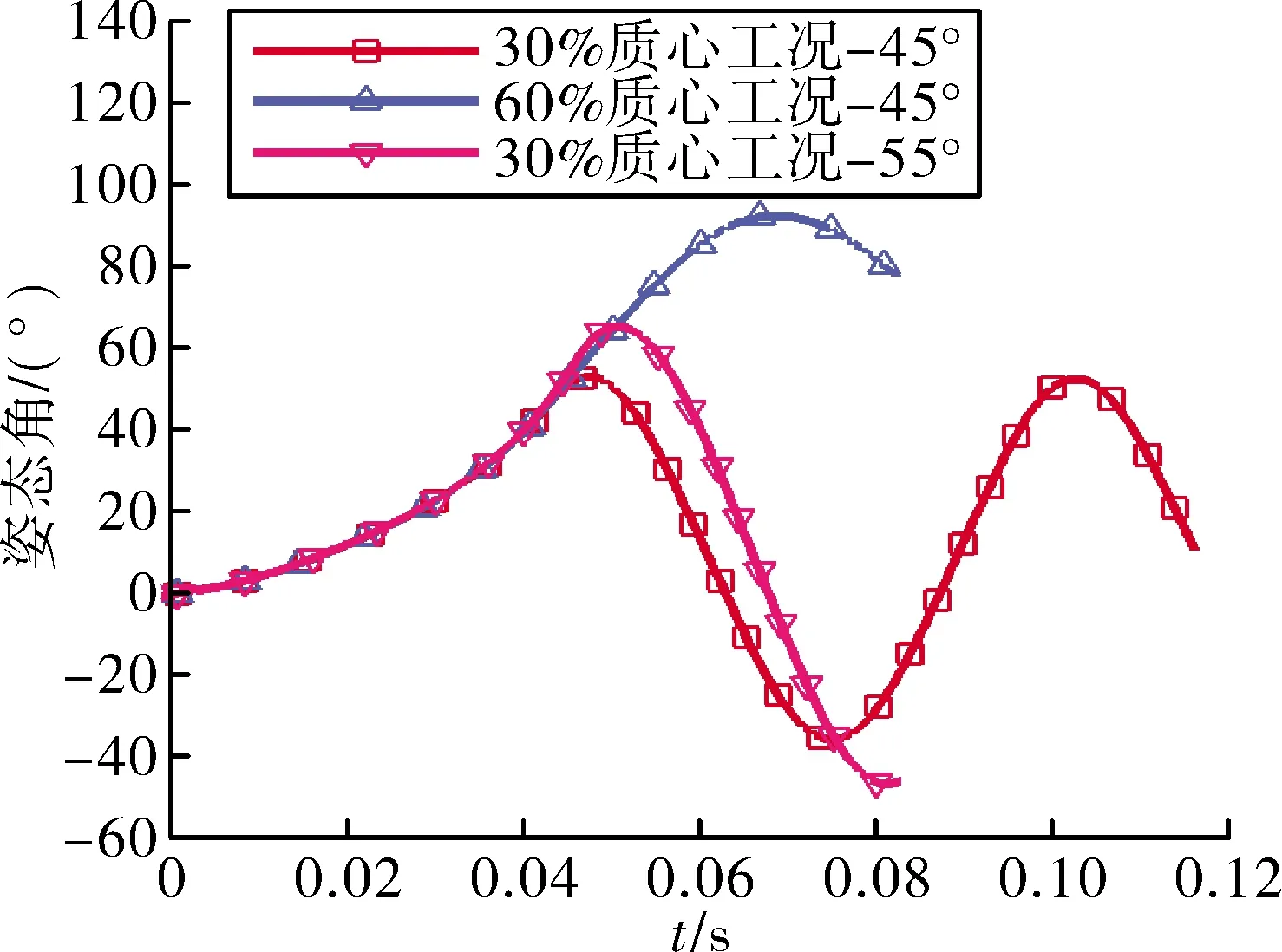
圖7 整流罩俯仰方向姿態(tài)角變化
圖7中還給出了轉動約束解鎖角度55°時整流罩俯仰姿態(tài)角隨時間變化曲線。整流罩在處于約束轉動條件下,氣動力矩使姿態(tài)角持續(xù)增加,約束解除后初始俯仰姿態(tài)角更大,從而俯仰運動幅度更大,運動周期更長,從上文分析結果可知,此時分離安全性更好。綜上所述,在罩體不發(fā)生翻轉的前提下,可以通過適當?shù)慕档挽o穩(wěn)定度或增大初始俯仰角(增大解鎖角度)來使罩體更長時間處于負攻角狀態(tài),從而提高分離安全性。
3.3 擾動分析
從拋罩分離過程開始后,彈身受擾動主要由以下3部分組成:進氣道內(nèi)流場的影響,彈身與罩體轉軸處的結構傳力,以及罩體下落過程中激波對彈身的影響。設分離時刻為0時刻,整流罩未張開前進氣道處于未啟動狀態(tài),從圖8可知,此時內(nèi)流幾乎不引起法向力,抬頭方向的力矩主要由軸向力引起;罩體張開過程中內(nèi)流產(chǎn)生負向法向力,內(nèi)流場合力矩方向變?yōu)槭箯椛淼皖^;t=60 ms后內(nèi)流場趨于穩(wěn)定。圖9給出了不同時刻進氣道下表面中線壓力系數(shù)分布,隨通氣量不斷增大,內(nèi)流場逐步建立穩(wěn)定的斜激波系,進氣道下表面壓力呈階躍式分布,較大壓力梯度出現(xiàn)在S彎與隔離段的過渡區(qū)以及燃燒室與噴管的過渡區(qū)。
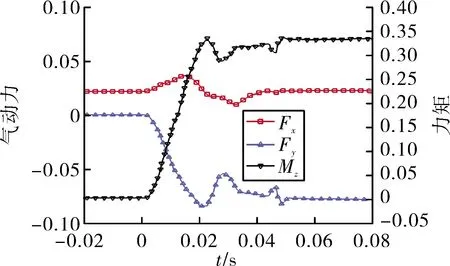
圖8 進氣道內(nèi)流氣動力/力矩變化
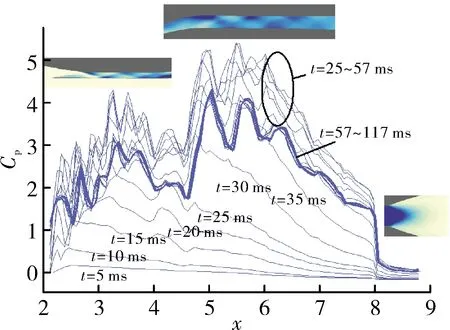
圖9 進氣道下表面中線壓力系數(shù)分布隨時間變化
整流罩在約束條件下轉動張開過程為變加速角運動,通過轉動軸向彈身傳遞作用力。由上文可知,整流罩質(zhì)量與慣性矩均遠小于彈身,其約束轉動過程可近似當做定軸旋轉運動進行分析。該過程轉軸受力規(guī)律與罩體質(zhì)心位置以及解鎖角度基本無關,以約束解鎖角度為55°、質(zhì)心位置30%為例,由式(5)求得轉軸處受力隨罩體張開角度變化如圖10所示。
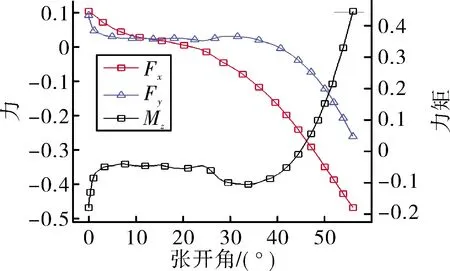
圖10 整流罩約束轉動過程中彈身轉軸處受力/力矩變化
分離過程剛開始時,罩體轉動角速度較小,在氣動力與角加速度等效切向慣性力的共同作用下,彈身在轉軸處受到沿彈軸向后與沿彈軸法向向上的力,合力產(chǎn)生較大的抬頭力矩;由于轉軸軸向力至彈身質(zhì)心力臂較短,引起的力矩較小,此處重點關注轉軸處法向力的變化;由角速度等效的法向慣性力隨著轉動角速度增加而增大,且整流罩張開角度變化也顯著提高了法向慣性力在彈軸法向方向的分量,在角度張開30°以后,轉軸處法向力減小至零然后沿負向迅速增加,產(chǎn)生合力矩方向從抬頭變?yōu)榈皖^。從上述受力特性可得出,整流罩約束解鎖角度越大,解鎖前罩體的最終角速度越大,在轉軸處將產(chǎn)生更大的法向力與力矩。減小整流罩旋轉約束解鎖角度可以有效降低彈身在轉軸處受到的擾動。
整流罩開始掉落離開彈身后,罩體所產(chǎn)生斜激波經(jīng)過與彈頭、唇口處激波產(chǎn)生多次相交反射后作用于彈身下部;隨著罩體下落以及后移,激波從前往后掃過彈身,在彈身表面引起的壓力變化逐漸減弱,當斜激波后移脫離彈尾后,整流罩在流場中不再對彈身產(chǎn)生干擾。圖11中給出兩種不同質(zhì)心工況罩體處于不同姿態(tài)時的流場壓力云圖,60%質(zhì)心工況整流罩長期處于較大的俯仰姿態(tài)角狀態(tài),產(chǎn)生斜激波的激波角更大,在和彈身距離相同時,激波反射在彈身上產(chǎn)生的高壓區(qū)強度更大,作用位置更靠前。
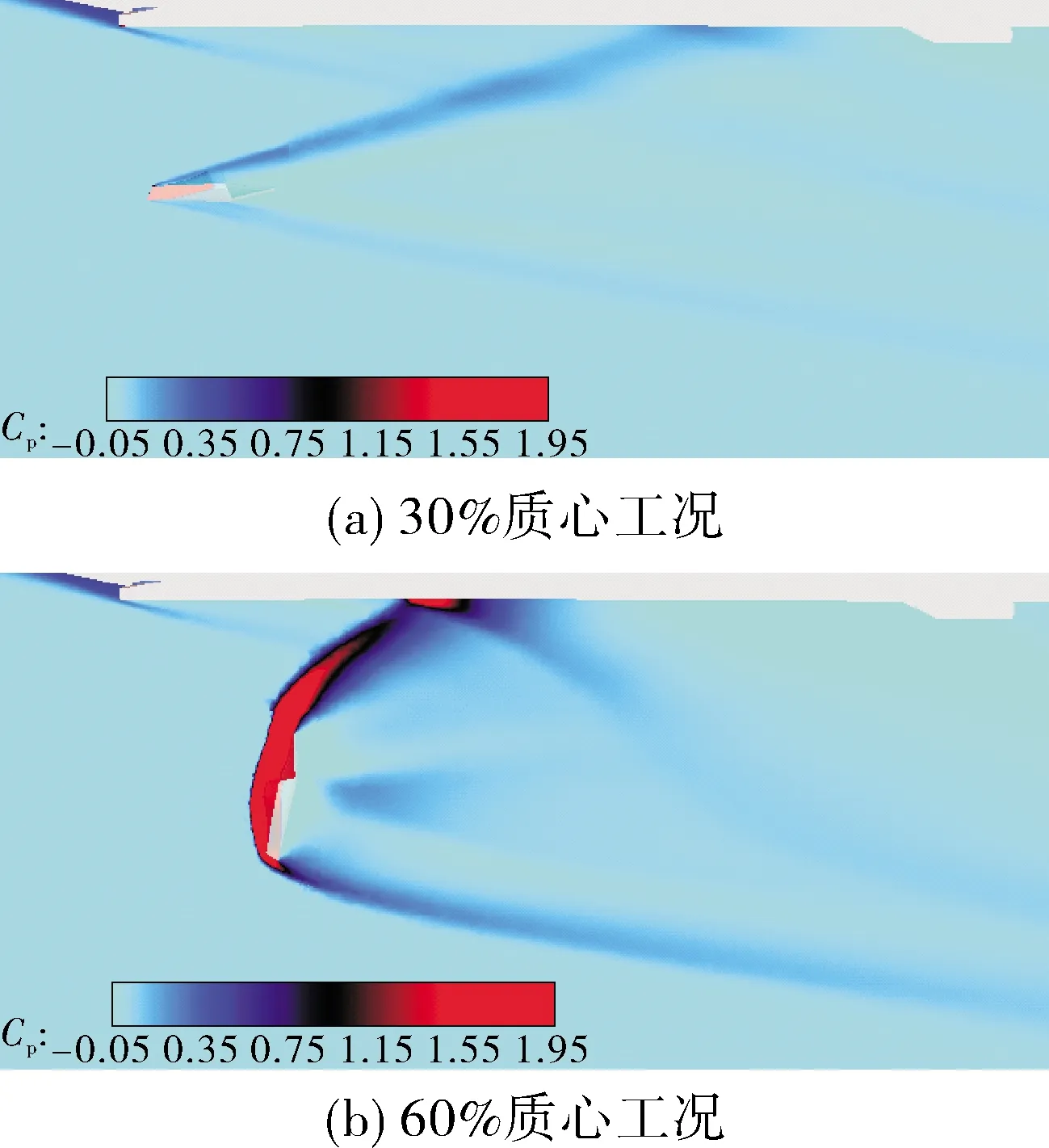
圖11 罩體不同姿態(tài)下流場
在不同時刻下,選取兩個工況彈身下表面中線作壓力分布曲線如圖12所示。由上文可知,旋拋約束解鎖時刻大約為t=42 ms,取罩體解鎖后稍微離開彈身處為作曲線圖的第一時刻,即t=46.5 ms,此時兩種工況罩體激波在彈身上產(chǎn)生的高壓區(qū)均較靠前(x=2.5附近),60%質(zhì)心工況高壓區(qū)局部壓強更大;隨時間繼續(xù),30%質(zhì)心工況罩體激波在彈身產(chǎn)生的高壓區(qū)迅速后移,高壓區(qū)壓力峰值迅速衰減,在t=57.5 ms時刻內(nèi)高壓區(qū)壓力系數(shù)衰減至0.7以下,此時高壓區(qū)在x=4.6處;60%質(zhì)心工況產(chǎn)生的高壓區(qū)峰值壓力系數(shù)衰減至0.7所對應時刻大約為t=77 ms,此時高壓區(qū)位置已到x=6.8處,可見盡管該工況下罩體的下落速度與后退速度更快,但產(chǎn)生的斜激波對彈身的擾動更顯著,持續(xù)時間更久。
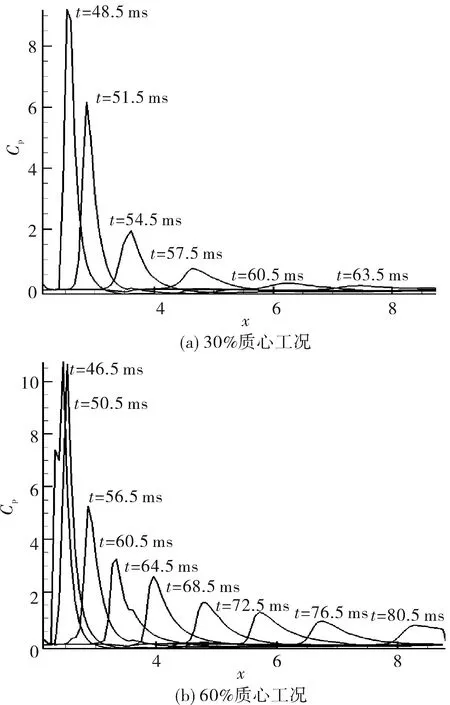
圖12 兩種工況下彈身下部中線處壓力分布
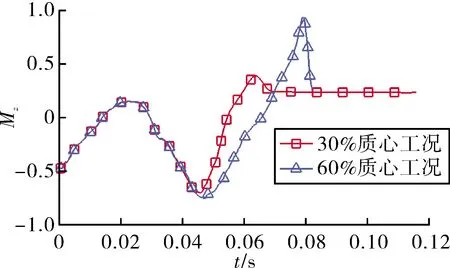
圖13 兩種工況下彈身受到的俯仰力矩系數(shù)隨時間變化
拋罩過程對彈身姿態(tài)的擾動直接反應至其所受俯仰力矩上,圖13中給出兩種不同質(zhì)心工況彈身俯仰力矩系數(shù)隨時間變化曲線。在整流罩處于約束狀態(tài)時,彈身受擾動主要由進氣道通氣和轉軸結構傳力構成,兩種工況基本一致。在罩體解除約束開始自由掉落后,兩工況彈身俯仰力矩均開始減小,對應激波在彈身產(chǎn)生的高壓區(qū)逐步向彈體質(zhì)心移動,其中30%質(zhì)心工況彈身力矩更早到達零點,說明高壓區(qū)后移速度更快;俯仰力矩跨過零點后開始沿正向增大,30%質(zhì)心工況激波強度較低,彈身受影響產(chǎn)生的低頭力矩較小,并約t=64 ms時激波離開彈尾,60%質(zhì)心工況產(chǎn)生較強的斜激波,使彈身具有較大的低頭力矩,并且持續(xù)更長的時間,激波離開彈尾時刻約為t=83 ms(整流罩下落至加密邊界計算停止時剛好激波掃過彈尾)。
4 結論
通過非定常CFD手段結合CFE方法,對高超聲速導彈進氣道整流罩旋拋式分離過程開展數(shù)值計算,對于流場非定常特性的捕捉以及物體間氣動干擾的模擬取得較好的效果;針對分離方案設計、安全性分析與流場擾動分析展開了討論,通過分析罩體/彈體運動特性與流場結構,得出以下結論:
1)整流罩質(zhì)量特性遠小于彈體時,可以通過合理布置罩體質(zhì)量分布以及約束解鎖角度來調(diào)整其運動姿態(tài)變化,以達到提高分離安全性的目的。
2)向下旋拋分離約束解鎖后,整流罩保持較大的俯仰姿態(tài)角有助于其向下更快速遠離彈身,同時向后飛離彈尾所需時間也越短,分離安全性更好。
3)分離過程中彈體受到的擾動來源于進氣道通氣過程、轉軸結構傳力以及整流罩激波的干擾,其中罩體激波對彈身姿態(tài)的擾動最為顯著,激波從彈頭掃過至彈尾時,分別對彈身造成額外的先抬頭后低頭的擾動力矩;整流罩姿態(tài)角較大時,激波強度更大,造成的擾動更顯著,持續(xù)時間更長。
