城市軌道車輛綜合線路圖處理系統設計與開發
2020-11-10 07:52:22蔣曉東孫洪濤尉曼遠胡定玉
智能計算機與應用 2020年5期
王 帥, 方 宇, 蔣曉東, 孫洪濤, 尉曼遠, 胡定玉
(1 上海工程技術大學, 上海201620;2 申通北車(上海)軌道交通車輛維修有限公司, 上海201106;3 上海移鴻信息科技有限公司, 上海201600)
0 引 言
隨著計算機技術和圖像領域技術的快速發展,人工智能和大數據分析已經廣泛運用于很多領域,將城市軌道交通和計算機科學與技術結合起來也是當前的研究重點。 目前,數字圖像處理作為圖像領域 的 重 要 部 分, 將 其 與 MATLAB 結 合, 利 用MATLAB 軟件強大的運算處理能力,可達到對圖像數據進行快速分析的目的。
圖像領域研究中具有代表性的是南京大學數字圖像采集與處理實驗平臺和清華大學所研制出的數字圖像研發處理系統TDB-IDK。 上述兩個系統的特點主要是能夠實時分析圖像信號,方便開發人員對圖像進行處理,且能夠依據用戶的具體需求進行合理的改動,不僅能完成黑白以及彩色信號的快速分析,還能完成圖形的整體顯示功能[1]。
圖像處理技術已經廣泛的運用于多種領域,如醫療保健、航空航天、軍事等,但是城市軌道交通和圖像處理技術結合的研究較為少見。 當前,國內已有地鐵公司開發了城市軌道交通列車電氣仿真系統。 電氣仿真系統最重要的環節是對城市軌道交通綜合線路圖進行數據采集,在進行數據采集時,一般采用電腦瀏覽圖片的方式進行人工識別城市軌道交通車輛綜合線路圖。 在這種情況下,上傳圖片的清晰程度會嚴重影響數據采集的準確率。 針對該問題,需要開發一套系統,從而可以快速的將上傳的不清晰綜合線路圖進行處理。 由于不同的線路圖存在的清晰問題不一樣,該系統需兼備可操作性,便于工作人員進行可選擇,有需求的操作。
1 系統總體設計方案
1.1 系統設計思路
國內地鐵公司的綜合線路圖一般分為兩種,紙質版和PDF 版。 紙質版綜合線路圖存在易破損、易污染等問題,由于上傳的紙質版綜合線路圖圖片一般是人工拍攝的,受限于拍攝設備與技術,上傳的圖片可能存在模糊和傾斜等情況。 而PDF 版綜合線路圖受限于電腦屏幕,需要對圖片進行放大和縮小,容易導致圖片失真。 所以,紙質版和PDF 版電路圖均不利于直接識別。 針對上述情況,論文設計的系統可以對上傳的圖片進行快速處理,便于操作,可以根據界面所提供的功能直觀地進行相關操作,提高了工作效率,且可以保存原始的數據方便查驗和管理。 經過本系統處理后的城市軌道交通車輛綜合線路圖,能夠為后續數據采集提供保障,提高了最終的綜合線路圖識別結果的準確率。
1.2 系統設計的總體框架
利用MATLAB 軟件,搭建城市軌道車輛綜合線路圖處理系統。 該系統可以根據需求對上傳的不清晰線路圖圖片進行處理,系統的總體框架如圖1 所示。 系統分為登陸模塊、圖像處理模塊、反饋模塊和后臺管理模塊。 在登錄模塊進行登錄,進入到圖像處理模塊,在該模塊對上傳的線路圖圖片進行特定需求的操作。 圖片處理完成后進入反饋模塊,在反饋窗口中,可以對本次圖片處理進行評分與提出建議,分數和建議將提交至后臺管理模塊進行數據分析,用于對系統的改進,同時在該模塊中還可與其它軟件進行連接。
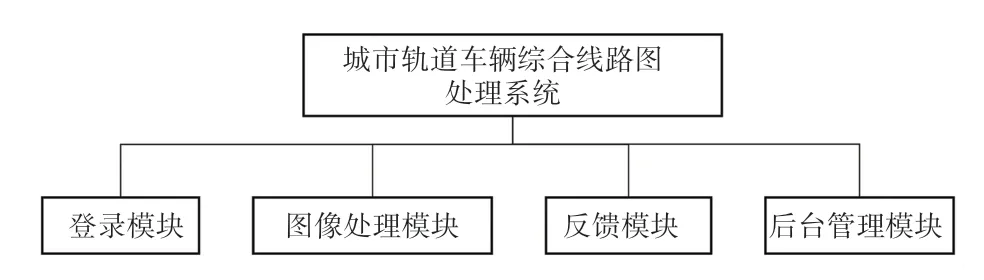
圖1 系統總體架構圖Fig. 1 Overall system architecture diagram
1.3 系統的優勢分析
該系統優勢在于,將上傳的模糊、不清晰的圖片進行二次處理,且提供了豐富的處理功能。 利用該系統可以對城市軌道車輛綜合線路圖進行有需要的操作,具有良好的實用性和用戶交互性,提供工作便利的同時,確保車輛綜合線路圖處理的準確性,為后續的城市軌道交通綜合線路圖數據采集和電氣系統檢修建立良好的基礎。 利用該系統不僅可以了解系統各部分功能實現的具體步驟,還可以直觀的看到不同的數字圖像處理算法的相關結果,該系統還具有良好的擴展性和一定的改進空間。
2 系統功能開發
2.1 登錄界面開發
利用MATLAB 的界面設計編輯器和屬性檢查器兩個功能,并且加入以下代碼:
ha=axes('units','normalized','pos',[0 0 1 1]);
uistack(ha,'down');
ii=imread('subway.jpg');
image(ii);
colormap gray
set(ha,'handlevisibility','off','visible','on');
2.2 圖像處理模塊開發
圖像處理模塊的功能分為五大部分,如圖2 所示,分別是圖像轉化、圖像平滑去噪、圖像銳化、圖像邊緣檢測和圖像分割,功能實現依托于MATLAB 源碼編譯,每一部分對應的功能介紹如下:
(1)圖像轉化。 圖像轉化包括圖像的格式轉化、圖像的傾斜校正及圖像的灰度化處理等操作。MATLAB 支持的圖像類型有索引圖像、灰度圖像、真彩色圖像等多種類型。 大多數的圖像都需要進行格式轉換后才能進行后續處理。 真彩色圖像需轉化為灰度圖像,進行歸一化處理。 由于上傳的城市軌道交通綜合線路圖是人工拍攝的,可能會存在傾斜問題,進行傾斜校正,得到校正后的圖片。
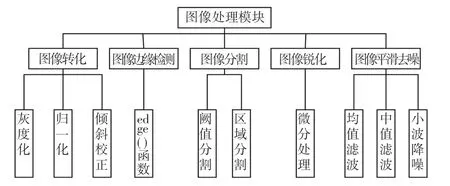
圖2 圖像處理模塊結構圖Fig. 2 Image processing module structure diagram
(2)圖像平滑去噪。 人工拍攝得到的圖像可能會模糊不清,即使清晰的圖像在獲取和傳輸的過程中也會產生噪聲,如何有效去除噪聲是提高識別綜合線路圖識別準確率的關鍵。 本系統提供了均值濾波和中值濾波和小波降噪三種算法供選擇。
(3)圖像銳化。 圖像的銳化處理是指通過增強圖像的邊緣以及灰度變化明顯的部分,使圖片的輪廓線和細節等部分便于進行更清晰的處理。 從數學觀點上來看,圖像銳化主要是通過微分方法進行的,分為線性銳化處理和非線性銳化處理。 MATLAB 提供了利用fspecial()函數創建的Laplacian 算子,Roberts 梯度算子,Sobel 算子等多種算法,便于根據需求來選擇不同的方法去進行相關的圖像銳化處理。
(4)圖像邊緣檢測。 圖像的邊緣檢測是數字圖像處理的重要部分,尤其是在目標區域識別和特征目標區域提取這兩部分中運用廣泛。 城市軌道交通綜合線路圖并不是每張圖只有一個模塊,有的一張圖里有3 個模塊,模塊A、模塊B 和模塊C。 只有找到3 個模塊的邊緣位置,才能進行下一步的操作。同樣綜合線路圖中的拐點也是需要檢測的,拐點分為實點和虛點,實點一般代表線路連接點,即不同線路的交匯點。 虛點一般代表模塊連接點,即線路和虛線框的交匯點。 MATLAB 提供了專門的函數用于邊緣檢測,即edge()工具函數,該函數支持zerocross 算子,Prewitt 算子,Canny 算子等不同的算子,可以根據需求進行相關的邊緣檢測。
(5)圖像分割。 圖像分割將圖像的某些感興趣的特征區域分割提取的技術,一般采用的技術分為全局分割和區域分割。 全局分割技術又稱為閾值分割,包括全局閾值法、迭代式閾值分割和直方圖闕值分割等;區域分割技術主要包括區域生長法和分水嶺分割法。 其中分水嶺分割法又分為距離變換分水嶺分割法、梯度分水嶺分割法和標記符分水嶺分割法。
2.3 反饋模塊開發
反饋模塊主要有兩部分功能,即評分和提出建議,如圖3 所示。 由圖3 可知,評分功能共分為五項,由于對系統處理后的圖片存在主觀評價,所以評分分數可以直接體現系統的良好程度。 當分數低于60 分時,系統自動在后臺管理模塊中彈出警告,評分信息將被及時發現。 建議功能就是供使用人員提出意見與訴求,如添加系統新功能、對現有系統的修改建議等。 反饋模塊的功能主要是便于后臺工作人員對于系統的維護和后續改進。
2.4 后臺管理模塊開發
系統的后臺管理模塊有兩個功能,如圖4 所示。第一個功能是收集反饋模塊所提交的信息,將反饋的分數和建議保存及后續定期數據分析。 如將不同分數段的分數分批統計,建立分數直方圖,便于直觀的進行橫向對比;第二個功能是將MATLAB 軟件與其它軟件進行連接。 MATLAB 雖然是一個強大的科學計算軟件,廣泛運用于較多領域,但是有很多實際的運用并未普及,需要與其它軟件協作運行,如SQL Sever 數據庫、Visual C ++6.0 和Javascript 等軟件。通過協作運行,后臺管理可以確保前臺功能正常,從而提高系統的可靠性和高效性。 以MATLAB 和Visual C ++結合為例,首先將Matlab 算法轉換為Visual C++6.0 可識別的程序,將轉換后生成文件中的.dll 文件、.lib 文件和.h 文件復制到系統所在路徑下,在Visual C++6.0 中調用相應的.h 文件中的函數,這樣就可以實現相應的功能[7]。
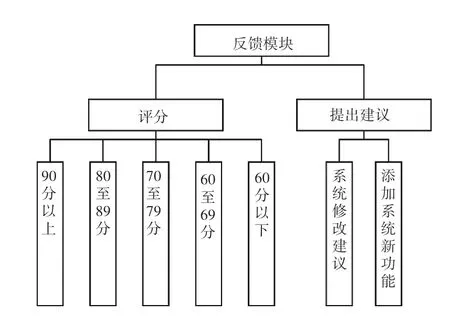
圖3 反饋模塊結構圖Fig. 3 Structure diagram of feedback module
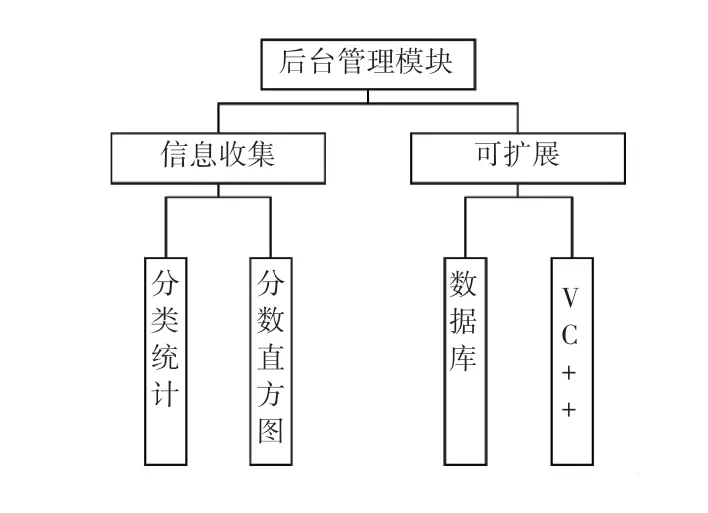
圖4 后臺管理模塊結構圖Fig. 4 Background management module structure diagram
3 系統功能驗證
3.1 系統運行結果
系統上傳了一張如圖5 所示的原始城市軌道交通綜合線路圖,該圖片不僅不清晰,而且充滿了噪聲,不利于進行直接識別。 將利用MATLAB 程序對線路圖進行快速處理,經過拉普拉斯算子和均值濾波處理后,得到一張清晰的、便于識別的綜合線路圖,如圖6 所示。
3.2 綜合線路圖采集結果分析
城市軌道車輛綜合線路圖一般采用人工手動采集的方式,將綜合線路圖根據電腦屏幕的大小進行截取并上傳到采集系統中,這樣會導致上傳的電路圖存在模糊、有瑕疵等問題,如圖5 所示。 此外,采集是通過點擊鼠標進行坐標獲取的,按照數字和字母點擊左下角,電路元器件點擊左上角,線路路徑點擊起始點,完成一張線路圖數據采集的時間平均在45 min 左右,不僅易于出現坐標誤差,而且進行元器件比對時也常出現模糊的狀況。 根據大數據分析,人工數據采集準確率一般在70%左右。
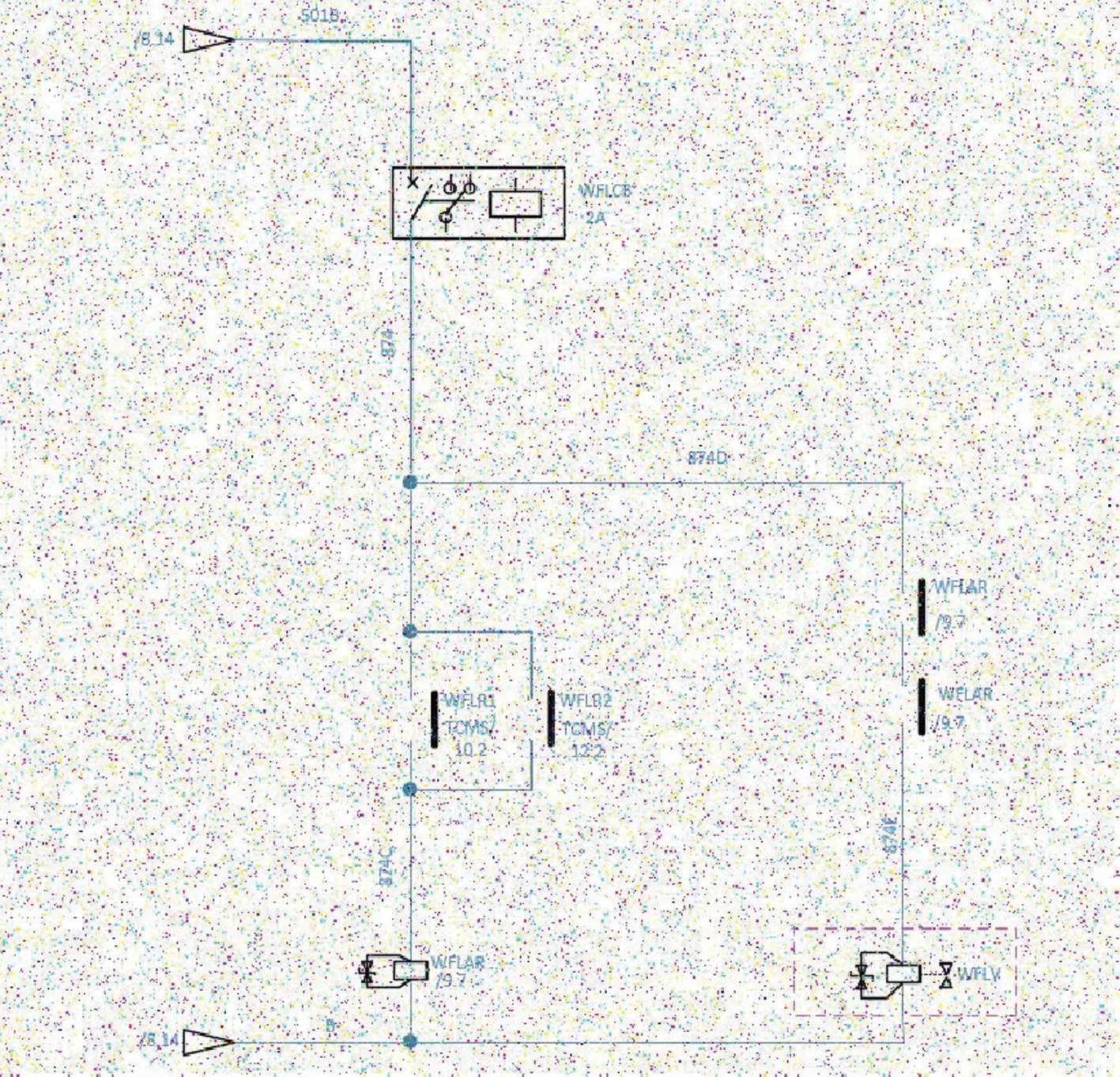
圖5 未經處理的列車綜合線路圖Fig. 5 Unprocessed comprehensive train map

圖6 系統處理后的綜合線路圖Fig. 6 Comprehensive circuit diagram after system processing
該系統通過將上傳電路圖進行處理,可以確保輸出的電路圖更為清晰、便于識別與分析,進而提升了準確率,如圖6 所示。 采集元器件時,將掃描到的圖像和元器件庫中的樣本進行比對,當匹配率達到80%以上時,便可確定該元器件,從而輸出坐標。 通過實驗驗證,本系統的采集準確率可達95%。 系統已經建立了較為完整的元器件庫和線路路徑庫,可根據編輯好的采集系統自動對綜合線路圖進行數據采集,采集線路圖所需時間縮短至15 min 左右。
通過表1 的結果對比可以發現,系統自動數據采集的準確率較人工數據采集的準確率提高了25%,系統自動數據采集的時間較人工數據采集的時間縮短了30 min。
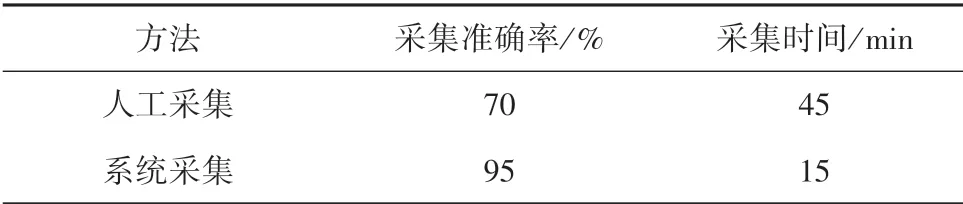
表1 實驗結果對比Tab. 1 Comparison of experimental results
4 結束語
本文基于MATLAB 軟件中豐富的圖像處理函數和GUI 人機友好交互的特性,設計出城市軌道車輛綜合線路圖處理系統,系統可以對上傳的城市軌道車輛綜合線路圖圖片進行快速、有選擇的智能處理,為后續數據采集準確性提供保證。 系統的反饋模塊可以確保系統的正常運行以及維護優化,給予系統較大的完善空間。 當前,地鐵綜合線路圖的數據采集以人工為主,隨著計算機技術和人工智能的快速發展,綜合線路圖的數據采集將由人工采集轉化為電腦智能采集,本系統進一步的改善和更新,確保長期使用。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中國科技論壇(2017年7期)2017-07-25 08:49:53
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20
