考慮到站時間可靠性的有限公交優先信號控制
2020-11-10 07:52:20趙天羽梁士棟張子毅杜豪赫
智能計算機與應用 2020年5期
關鍵詞:信號
趙天羽, 梁士棟, 徐 晗, 張子毅, 杜豪赫
(上海理工大學 管理學院, 上海200093)
0 引 言
隨著中國各級政府對公共交通資金投入增加和政策扶持力度的增大,公共交通體系建設得以快速發展。 針對目前交通情況,倡導公交優先出行的方案是緩解交通壓力的有效方法。 傳統的公交優先策略是簡單的單點交叉口公交優先的信號控制策略[1-4],即根據公交車在該段線路上的行駛的速率、乘客分布及數量,線路上過往車輛及垂直交叉口小汽車的分布等歷史數據,在信號交叉口設置一個特定的信號燈配時,以給予公交車優先權。 在傳統控制策略在初始階段收到了一定的成效,但在隨后的公交運營中出現了垂直交叉口過往車輛滯留時間過長的現象。 此外,這種控制方法針對性不強,公交車在道路上會遇到公交到站停車、禮讓行人、乘客上下車時間較難把握等情況,使得每輛公交車在實際行駛過程中車頭時距發生改變,簡單的單點交叉口公交優先的信號控制策略不能根據每輛公交車的車頭時距做出靈活的調節。 近年來,根據公交車到達交叉口的距離自動改變交通信號燈的配時和周期,可以保證每一輛公交車盡快到達下一站。 但是,這種傳統的調控方式造成了公交串車現象[5-6],公交簇擁現象[7]等一系列不良現象。 大多數調控方法只是考慮單一的公交車在道路上的運行[8-9],卻忽略了公交系統整體的運行效果,這使得公交車之間沒有聯系,公交車的優勢并沒有被充分挖掘。
本文的研究主要內容是:在每一輛公交車到達信號燈交叉口之前的一個特定位置,通過輸入公交車的行駛速度與路況信息,對其到達交叉口的時間及車頭時距做出預估,并將預估車頭時距與期望車頭時距做出比較。 若小于期望值,則通過實時改變信號燈的配時,盡可能減緩公交車通過。 若大于期望值,則通過實時改變信號燈的配時,盡可能減少公交車在交叉口的延誤時間。 這樣的信號燈調控方法根據公交車實時時空運行信息,兼顧公交系統本身運行秩序,讓公交有限優先。
1 問題描述
本文在信號交叉口處所使用的控制策略主要包括4 種:紅燈早斷、紅燈延長、綠燈早斷、綠燈延長。根據公交車到達交叉口車頭時距的不同情況采取不同方案進行調控。 要求控制模型滿足如下假設:
(1)公交車只在公交車專用道上行駛。
(2)公交車在理想狀態下到達交叉口,不考慮社會車輛及行人對公交車的影響。
(3)在公交車到達交叉口時,信號燈只在信號燈所在的周期內進行調控。
(4)在一個信號燈周期內,按照先綠燈后紅燈的條件進行。
典型信號周期內信號控制形式:紅燈早斷與紅燈延長,綠燈早斷與綠燈延長。 控制形式的實施機理過程如圖1 所示,其中圖1(a)為紅燈早斷與紅燈延長,其中圖1(b)為綠燈早斷與綠燈延長。
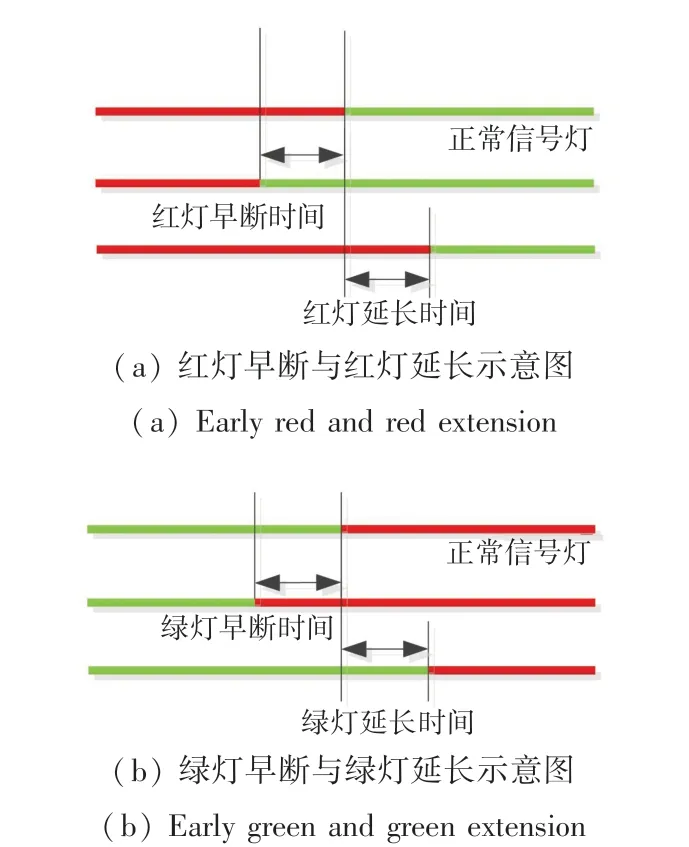
圖1 交叉口信號控制形式示意圖Fig. 1 Control strategy for the signalized intersection
1.1 公交車到達交叉口時間估計及目標信號周期識別
如圖2 所示,截面1,截面2 以及兩截面之間的信號交叉口部分為本文的研究對象。 根據預測公交車車頭時距調整信號燈控制方案,首先對公交車到達信號交叉口的時間進行計算。 截面1 為檢測器位置,當第i 輛公交車行駛至截面1 時,定義此時的時刻為Tin,i。 當該公交車行駛至交叉口停車線時,定義該時刻為Ta,i。
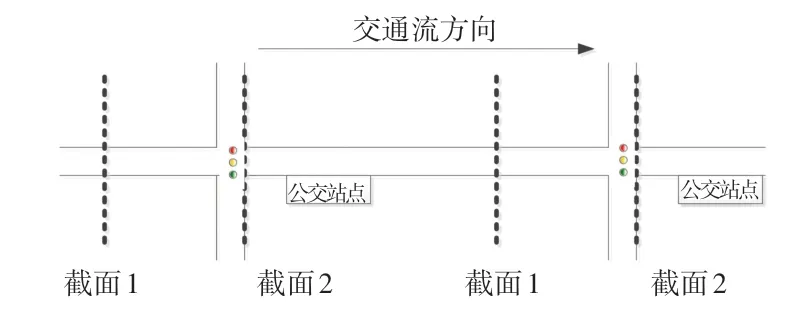
圖2 公交運行過程及信號控制區域示意圖Fig. 2 Operation process of buses and signal control area near intersection
根據假設,公交車在公交專用道上行駛時速度變化較小,設為定值V。 截面1 和信號交叉口之間的距離為L。 根據經典運動學公式可知,到達信號交叉口處的時刻如公式(1)所示。

為了使信號配時得以重新優化,應判斷公交車到達交叉口處的時刻所處的周期。 定義信號交叉口的信號周期時長為C,當公交車到達交叉口的時間大于n 倍的C 且小于n +1 倍的C 時,則可以判定公交車到達交叉口時位于信號燈的第n +1 個周期內,如公式(2) 所示。 對該周期內的信號燈時長進行調整。

公交車在公交專用道上按照交通流方向行駛,且公交車上裝有發信器。 為檢測公交車通過截面1的時刻,預測公交車到達交叉口的時刻,并調整公交車通過交叉口的時刻(即公交車通過截面2 的時刻)。 交叉口的交通信號燈可以根據截面1 處接收器反饋的信號臨時改變交通信號燈的配時,改變公交車到達交叉口時的運行狀態。
以圖2 為例,截面1 到達交叉口的距離L 不宜過長也不宜過短。 如果距離短,交叉口信號燈無法及時處理由截面1 處檢測器反饋的信息,進而無法形成對公交車的調控效果;如果距離過長,則交叉口信號燈調控的時間變化過大,無法被公交車完全利用。 建議L 的距離為60 m~150 m 之間[10]。 當截面1 的檢測器檢測到公交車通過截面1 時,將信息反饋到交叉口信號燈控制后臺[11],后臺再根據估計的公交車車頭時距與理想的車頭時距進行對比,選出最優調控方案,并實時調控信號燈的狀態,使公交車通過交叉口之后的車頭時距更接近理想車頭時距。
1.2 公交車頭時距計算模型
定義hi為第i 輛公交車的車頭時距。 (后一輛公交車相對于前一輛公交車到達截面2 的時刻的差值)

通過給定的標準車頭時距H, 調控信號燈的配時,使整條公交運營線路上的公交車的車頭時距向標準車頭時距H 收斂,從而提高整條公交運營線路上公交車運營的效率。 如公式(4)所示。

定義D 為信號燈可調控狀態下公交車在交叉口相較于信號燈正常狀態下延誤時長,延誤時長與交叉口的紅燈時長r 和綠燈時長g 有關,構建公交車的延誤時長與紅燈(r) 和綠燈的函數關系公式(5) 所示。

2 信號配時優化模型及控制算法
2.1 信號配時優化模型
當第i 輛公交車到達截面1 時,預測第i 輛公交車與第i-1 輛公交車通過截面2 時的時間,即第i 輛公交車的車頭時距。 根據第i 輛公交車到達截面1時的行駛速度,預測該公交車到達交叉口時信號燈的運行的時間。 并根據預測的車頭時距與標準車頭時距的偏差,改變信號配時,規則如下:
Case 1在不改變信號配時的情況下,期望的車頭時距滿足公式(4) hi= H 的判斷標準,則不改變信號燈的原有配時,使得公交車到達交叉口時按照原信號燈配時通行。
Case 2當hi>H 且交叉口信號燈為綠燈時。
當預測車頭時距h~i 大于標準車頭時距時,說明公交車i 行駛速度小于期望,應該加快公交行駛速度,由于此時信號交叉口已經處于綠燈,無法進一步加快公交運行速度。 為保證公交車運營效率,則不改變信號燈配時,公交車直接通過,延誤為0,如公式(6)所示。

Case 3當hi≤H 且交叉口信號燈為綠燈時。
由于交叉口信號燈為單點控制,即調控只在公交車到達交叉口時,信號燈正在進行的周期內完成。則需要對比在不調控和綠燈早斷兩種不同方案,選擇優化效果更顯著的方案進行調配。
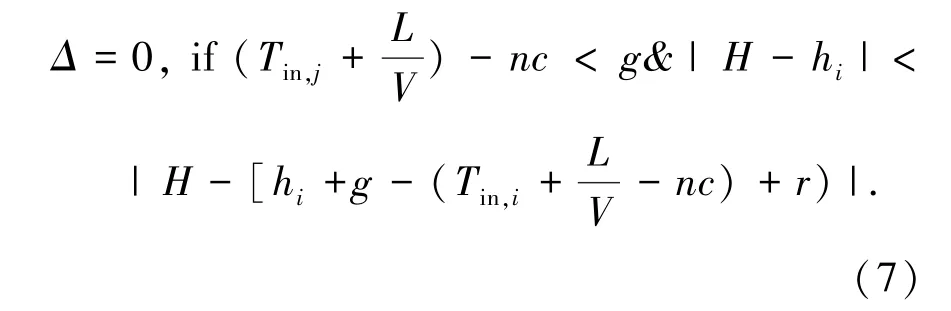
當公交車在不調控的情況下,優化效果顯著于綠燈早斷的優化效果,則采用信號燈不調控,信號燈改變時間如公式(7)所示。
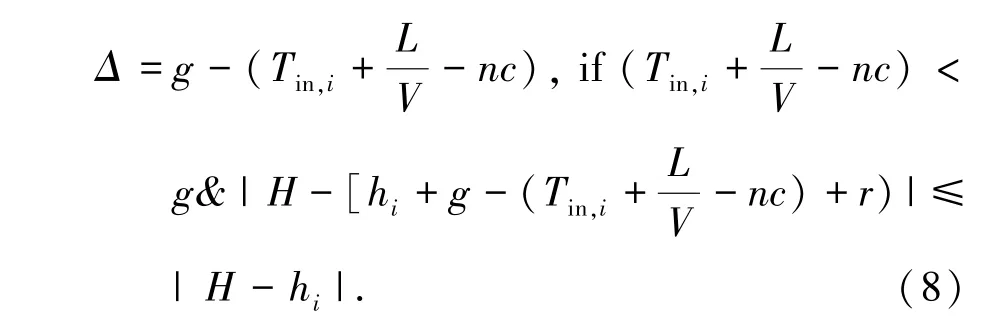
當公交車在采用綠燈早斷的情況下,優化效果顯著于不調控的優化效果,則采用綠燈早斷,早斷時間如公式(8)所示。
Case 4當hi>H 且交叉口信號燈為紅燈時。
為保證公交車運營效率,不使該公交車的車頭時距與目標車頭時距進一步擴大,需要把交叉口的信號燈改為綠燈。 需要對比在綠燈延長與紅燈早斷兩種不同控制方案,選擇優化效果更顯著的方案進行調配。
當綠燈延長相較于原信號配時改動方案比紅燈早斷相較于原信號配時改動方案改動幅度小時,采用綠燈延長,延長時間如公式(9)所示。
當紅燈早斷相較于原信號配時改動方案比綠燈延長相較于原信號配時改動方案改動幅度小時,采用紅燈早斷,早斷時間如公式(10)所示。
Case 5當hi≤H 且交叉口信號燈為紅燈時。
為保證提高公交運營效率,需要判斷公交車所需要的延誤時間是否能在公交車到達交叉口時紅燈剩余的時長內完成。
當公交車所需要的延誤時間能在公交車到達交叉口時紅燈剩余的時長內完成時,采用紅燈早斷。早斷時間如公式(11)所示。
當公交車所需要的延誤時間不能在公交車到達交叉口時紅燈剩余的時長內完成時,采用紅燈延長。延長時間如公式(12)所示。

2.2 約束條件
定義典型信號周期內信號控制應保證交叉口以及垂直交叉口行人順利通過,即紅燈早斷與紅燈延長,綠燈早斷與綠燈延長都應該控制在一定范圍內,需要設置最小綠燈時間Gmin。
綠燈早斷的時間的范圍如公式(13)所示。
2.3 公交有限信號優先控制流程圖
當公交車到達交叉口時,車頭時距滿足公式(3),即不改變信號燈配時,故不在流程圖中展示。
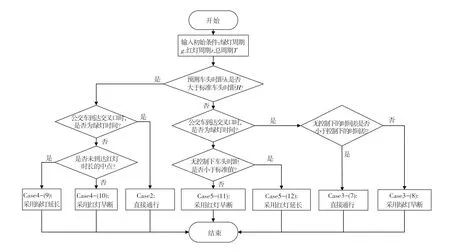
圖3 公交配時調控流程圖Fig. 3 Flow chart of optimal signal control for buses
3 模擬驗證
本文用C 語言搭建仿真平臺,模擬公交車在交叉口運行情況,驗證本文提出的信號優先控制方法的有效性及可靠性,并對信號周期做進一步敏感性分析。 本文驗證部分選擇圖2 中截面1 與截面2 之間的單向道路區間為實驗對象。 假設公交車在公交車專用道上行駛,與道路上的小汽車相對獨立。 在正常狀態下交叉口信號燈的周期為180 s,按照先綠燈90 s 后紅燈90 s 的順序進行。 在本文的信號控制中,約束條件最短綠燈時間為10 s。
用100 個隨機生成的公交車車頭時距進行測試,100 個公交車車頭時距均值為199 s,車頭時距標準差為28 s,測試結果如圖4 所示。 在經過正常紅綠燈調控的情況下通過交叉口之后,實驗中100 輛公交車的車頭時距標準差變成了43 s,而經過本文提出的方案進行調控下的公交車通過交叉口之后,實驗中100 s公交車的車頭時距標準差變成了26 s,即公交車在經過本文提出的方案調控下,公交車的車頭時距波動幅度較小,公交車的車頭時距更均衡。 公交車的服務水平在本文提出的控制方案下有了明顯的提高。
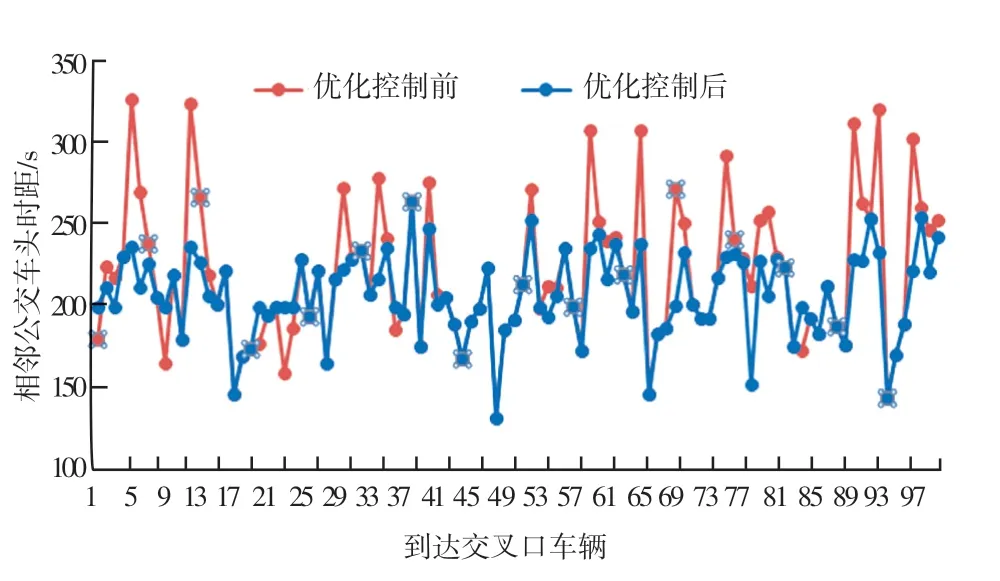
圖4 調控前后輸出車頭時距對比圖Fig. 4 Comparison of the headway fluctuation using optimal control method and original plan
為了更直觀地體現本文提出的信號燈調控方案能降低車頭時距的標準差,繼續對以上100 個隨機生成的公交車車頭時距進行分析。 數據顯示,在未經調控的信號燈下通過交叉口之后,實驗中100 輛公交車的車頭時距均落入130 s 至330 s 之間。 在本文提出的方案進行調控下的公交車通過交叉口之后,100 輛公交車的車頭時距也全部落入130 s 至330 s 之間。 于是本次分析打算將130 s 至330 s 之間,等分成20 份(即每連續十秒為一個區間)。 將以上兩組車頭時距分別放入對應的區間內,比較同一個區間內調控前后的車頭時距分別出現的頻次,并形成柱狀圖,如下圖5 所示。
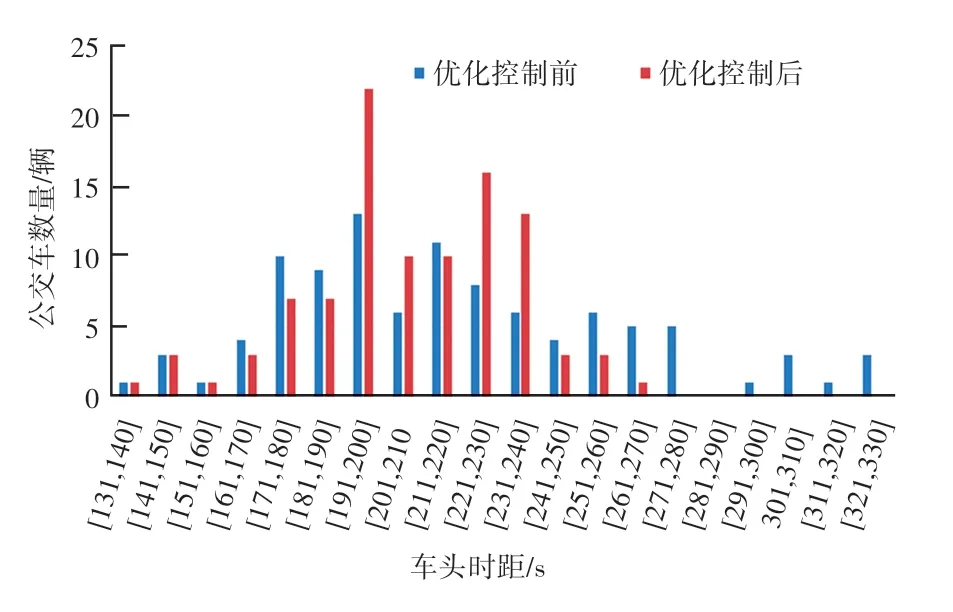
圖5 調控前后車頭時距頻數分布圖Fig. 5 Comparison of headway frequency between two scenes
在車頭時距170 s 到240 s 之間,可認為落入該區間的車頭時距與期望車頭時距相比,偏差較小。未經信號燈調控的車頭時距中,落入該區間的車頭時距共為67 個,占總體的67%。 而經過信號燈調控后,在該區間的車頭時距共為88 個,占總體的88%。相比,經過信號燈調控過后,有更多的車頭時距靠近均值。 對于該分布的左尾與右尾區間(即在車頭時距131 s 至170 s 之間與車頭時距240 s 至330 s 之間),可認為偏離期望車頭時距較大。 未經信號燈調控的車頭時距中,落入該區間的車頭時距共為33個,占總體的33%。 而經過信號燈調控后,在該區間的車頭時距共22 個,占總體的22%。 相比,經過信號燈調控過后,極端值的數量顯著降低。 柱狀圖更直觀地反映出信號燈調控方案能降低車頭時距的標準差,使其達到在均值附近穩定的狀態。
此外,驗證部分還對信號周期進行了敏感性分析。 取周期為10 s 作為最短周期,每10 s 作為一個單位,直到周期為300 s 進行研究。 研究表明:公交車在不同的交叉口信號周期下通過交叉口之后的車頭時距不同。 公交車在兩種信號調控下通過交叉口之后的車頭時距標準差如圖6 所示。
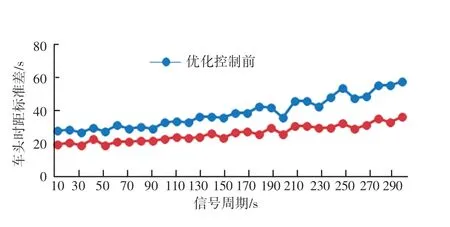
圖6 調控前后輸出車頭時距的標準差隨周期變化圖Fig. 6 Numerical analysis of headway standard deviation with increasing of signal cycle
隨著交叉口信號燈周期時間的增長,公交車通過交叉口后的車頭時距標準差呈明顯上升趨勢。 而在相同的到達截面1 時間的條件下,經過調控下的公交車通過交叉口之后的車頭時距標準差明顯低于未經過任何調控的公交車通過交叉口的車頭時距標準差。
調控的關鍵在于公交車到達截面1 時,預測公交車到達交叉口時交叉口信號燈的狀況,并根據車頭時距的實際情況,交叉口的信號燈做出相應的調控,使公交線路的車頭時距達到均衡。 如果調控預測準確,公交車在調控下通過交叉口的車頭時距的標準差一定小于公交車未經調控后通過交叉口的車頭時距的標準差。 模擬期間的100 輛公交車,無公交車采用綠燈早斷, 11 輛公交車采用了綠燈延長,25 輛公交車采用了紅燈早斷,10 輛公交車采用了紅燈延長。 總體而言,模擬驗證期間有46%的公交車通過交叉口時,信號燈配時改變。 而公交車通過信號配時改變的交叉口后的車頭時距標準差相較于未經調控的公交車通過交叉口后的車頭時距標準差下降了17 s,下降了約39.54%。 由此表明預測調控方案理想狀況下運行的可靠性。
4 結束語
本文通過公交車經過交叉口前的某一固定截面,根據公交車在公交車專用道上的行駛速度預測公交車到達交叉口的時間及到達交叉口時信號燈的運行狀況,根據公交車到達交叉口時的車頭時距的實際情況,改變交叉口的信號配時,使通過交叉口的公交車的車頭時距收斂于某一給定的固定值,從而使公交車的運營的效率提高。 采用C 語言編程模擬公交車隨機到達交叉口的時間,以及交叉口信號燈配時的改變。 實驗結果表明調控方案具有較高的可靠性,能使通過交叉口的公交車的車頭時距達到均衡,改善公交運營服務的可靠性。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
