基于深度置信網絡的齒輪箱智能診斷方法
2020-11-09 01:54:18段禮祥趙劍平曲海濤張德軍秦天飛
科學技術與工程 2020年27期
段禮祥, 趙劍平, 曲海濤, 張德軍, 秦天飛
(1.中國石油大學(北京)安全與海洋工程學院, 北京 102249; 2.中國石化勝利油田分公司地面工程維修中心, 東營 257000; 3.中國石油塔里木油田分公司, 庫爾勒 841000)
齒輪箱是機械設備中傳遞動力和改變轉速的部件,長時間處于高溫、高負荷的運行狀態中。在持續沖擊下,其零件很容易發生故障。油田現場環境復雜,采集到的齒輪箱振動信號包含大量的干擾,常淹沒在噪聲之中。因此,在強噪聲環境下,準確、有效提取齒輪箱的故障特征,是提高診斷準確率的有效途徑。其中,基于模態分解的方法得到了廣泛的關注,經驗模態分解(empirical mode decomposition,EMD)和局部均值分解(local mean decomposition,LMD)屬于傳統的遞歸式信號分解方法,廣泛應用于信號分解和特征提取領域,但其包絡估計誤差經過多次分解會被放大,從而出現模態混疊[1],無法將頻率相近的分量進行有效分離。變分模態分解(variational mode decompostion,VMD)是非遞歸式信號分解方法,在獲取分解分量的過程中通過迭代搜尋模型的最優解來確定每個分量的頻率中心及頻帶的帶寬,從而能夠實現信號在頻帶上的有效分離[2]。白堂博等[3]提出基于VMD和奇異值分解(singular value decomposition,SVD)的信號降噪方法,首先對振動信號進行VMD分解,然后對每個模態進行SVD降噪,最后選取故障特征分量進行時、頻域及包絡譜分析,確定故障類型。張超等[4]將振動信號進行VMD分解,并計算每個模態的能量熵輸入到支持向量機(support vector machine,SVM)分類器中進行故障分類。
MCKD是由Mcdonald等[5]在最小熵反褶積的基礎上提出,以最大相關峭度為目標,對信號進行解卷積運算,突出淹沒在噪聲信號中的周期性沖擊成分,已成功運用到了軸承和齒輪的故障診斷中[6-7]。
SVM和人工神經網絡(artificial neural network,ANN)是應用較為廣泛的淺層分類器,但存在局部最優解、收斂速度慢、耗時長等缺點[8]。Hinton等[9]首先提出了基于特征的深度學習,通過構建深層網絡模擬人類大腦逐層學習的模型和過程,直接從原始數據形成認識與判斷,避免傳統特征提取過程的復雜和不確定性,增強模式識別的智能性。深度置信網絡(deep belief network,DBN)以其快速推理,編碼更豐富、更高階網絡結構的優勢成為一種非常流行的深度學習模型。DBN表征信號與特征之間復雜的映射關系,非常適合復雜非線性、高維度數據的特征挖掘。目前,DBN已成功運用于語音、文字和圖像識別等領域,并在故障診斷領域得到初步應用[10]。
針對強噪聲干擾下,難以精確診斷齒輪箱故障的問題,提出了基于VMD-MCKD和DBN的齒輪箱智能診斷方法,運用VMD和MCKD對振動信號進行降噪濾波,凸顯信號中的故障沖擊成分,降低噪聲信號的干擾。將傳統的故障診斷方法和深度學習相結合,實現齒輪箱故障特征自適應挖掘與故障模式的智能識別。
1 理論方法
1.1 變分模態分解
變分模態分解構造的變分問題為:各模態之和等于輸入信號f,尋求k個模態函數,使得每個模態函數的估計帶寬之和最小[11]。定義一個幅值為Ak(t)、頻率為ωk(t)的調頻-調幅信號:
uk(t)=Ak(t)cos[φk(t)]
(1)
式(1)中:uk(t)是諧波信號;Ak(t)是信號的瞬時幅值;φk(t)是信號的相位。
VMD引入二次懲罰因子和拉格朗日乘法算子,將約束性變分問題變為非約束性變分問題,二次懲罰因子在隨機噪聲存在的情況下保證信號的重構精度,拉格朗日乘法算子加強約束條件嚴格性。拉格朗日表達式為

(2)
式(2)中:ωk(t)為頻率;λ為拉格朗日乘法算子;α為二次懲罰因子;δ(t)為單位脈沖函數;f(t)為輸入信號。
1.2 最大相關峭度解卷積
最大相關峭度解卷積通過構造有限沖擊響應濾波器,使原始信號通過濾波后相關峭度達到最大,從而突出被噪聲掩蓋的周期性沖擊成分。選取一個最優濾波器f(l),使相關峭度CKM(T)最大:

(3)
式(3)中:yn為周期性沖擊信號;T為沖擊信號周期;M為位移數;L為濾波器的長度;f為濾波器向量。

1.3 深度置信網絡
深度置信網絡是由多個受限玻爾茲曼機(restricted Boltzmann machine,RBM)和一個Softmax分類器堆疊而成的多隱含層神經網絡,運用逐層貪婪學習算法優化深層神經網絡的權重和偏置[12]。通過建立觀測數據與標簽數據之間的聯合分布,從低層到高層挖掘數據特征。
1.3.1 前向堆棧RBM訓練
RBM模型如圖1所示,包含可視層和隱含層兩層神經元,層間神經元雙向連接,層內神經元無連接。
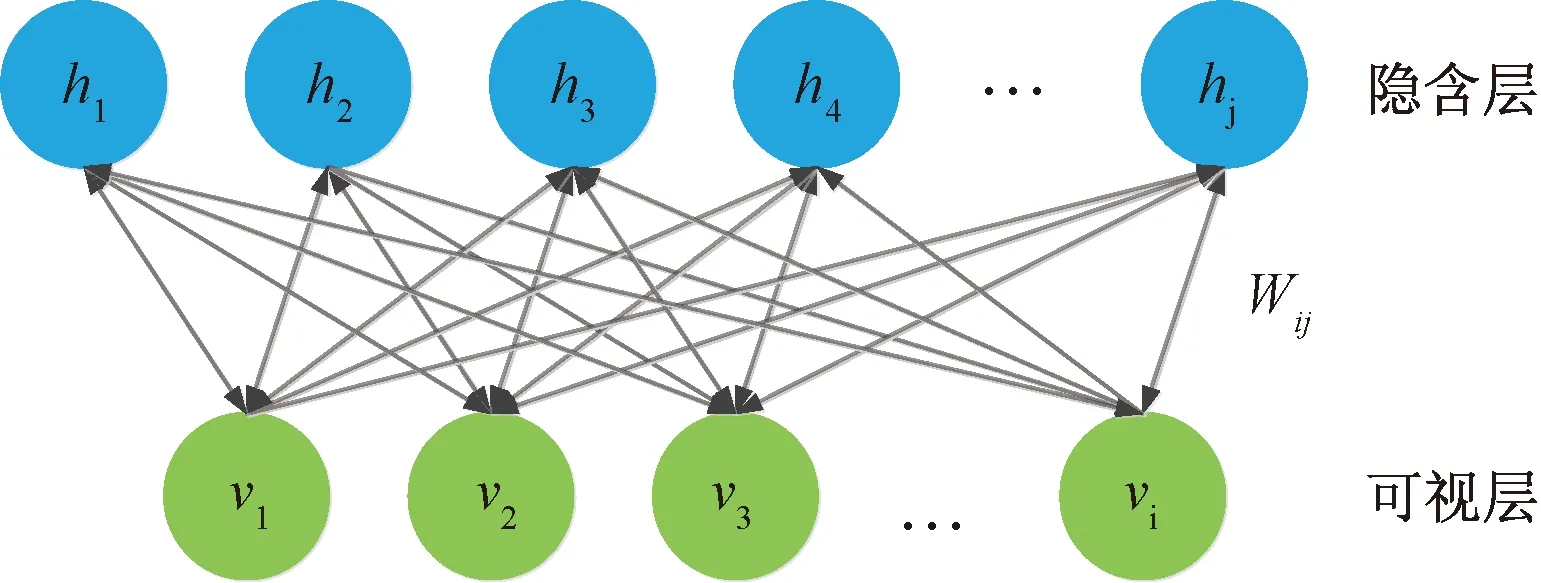
vi為可視層神經元;hj為隱含層神經元;wij為連接權重圖1 RBM模型Fig.1 RBM model
RBM是一種基于能量的隨機神經網絡[13]。可視層神經元v與隱含層神經元h聯合狀態(v,h)的能量函數定義為
(4)
式(4)中:I為可視層神經元的數量;J為隱含層神經元的數量;wij為可視層vi和隱含層hj的連接權重;ai和bj分別為可視層和隱含層的偏置。
RBM模型各隱含層節點的激活狀態是相互獨立的,第j個隱含層節點的激活函數為
(5)
(6)
在給定可視層向量v后,通過式(5)計算隱含層單元h的狀態,通過式(6)得到重構可視層單元v的狀態。當可視層單元和重構可視層單元之間的誤差最小時,隱含層單元就可以作為可視層輸入單元的特征提取結果,從而使網絡達到了特征提取的目的。RBM訓練求得最接近訓練樣本的聯合概率分布,更準確地還原特征,尋找可視層節點和隱含層節點之間最優連接權重和偏置。
1.3.2 反向傳播訓練
反向傳播訓練降低訓練誤差,提高DBN模型的分類準確率。反向傳播訓練考慮所有層神經網絡,使用模型輸出和標簽數據計算訓練誤差。DBN網絡參數被更新,以最小化訓練誤差[14]。反向傳播過程持續到網絡輸出達到最大迭代次數,預訓練的DBN模型通過反向微調進一步提高分類準確率。
2 基于VMD-MCKD和DBN的齒輪箱智能診斷方法
基于VMD-MCKD和DBN的齒輪箱智能診斷方法的步驟如下。
(1)將采集到的齒輪箱振動信號進行VMD分解,觀察中心頻率確定最佳模態分解效果。
(2)計算分解各模態與原信號的互相關系數δ,濾去δ<0.1的分量,保留δ>0.6的分量。
(3)將0.1≤δ≤0.6的分量進行MCKD降噪,根據采樣頻率和故障頻率確定解卷積周期,試驗確定最佳位移數和濾波器長度,達到最佳降噪效果,最后將降噪信號與δ>0.6的分量重構。
(4)將重構信號進行歸一化預處理,劃分訓練集和測試集,初始化DBN權重和偏置,設定深層神經網絡的超參數,進行前向堆棧RBM訓練和反向傳播訓練,達到全局性能最優,實現故障特征的自適應提取。
(5)將測試集輸入到訓練好的DBN網絡模型中,實現齒輪箱故障特征自適應挖掘與故障模式智能識別,輸出故障診斷結果。
3 工程應用
以塔里木油田某往復式注水泵傳動齒輪箱為研究對象,齒輪箱輸入軸轉速1 450 r/min,轉動頻率fr=24.17 Hz,主動輪齒數30,從動輪齒數65,采樣頻率42 240 Hz,采樣點數32 744。振動信號測點位于輸入軸軸承座豎直方向,如圖2所示。
在現場經過長期監測,獲取齒輪箱在正常、齒面磨損、齒根裂紋和輪齒斷裂4種運行狀態下的振動信號進行實驗。圖3為齒輪箱振動信號時域波形。
VMD需事先設定分解模態數k,以輪齒斷裂狀態下的故障信號為例進行自適應VMD分解,通過設定不同模態數求得的中心頻率如表1所示。

圖2 測點位置Fig.2 Location of measuring point
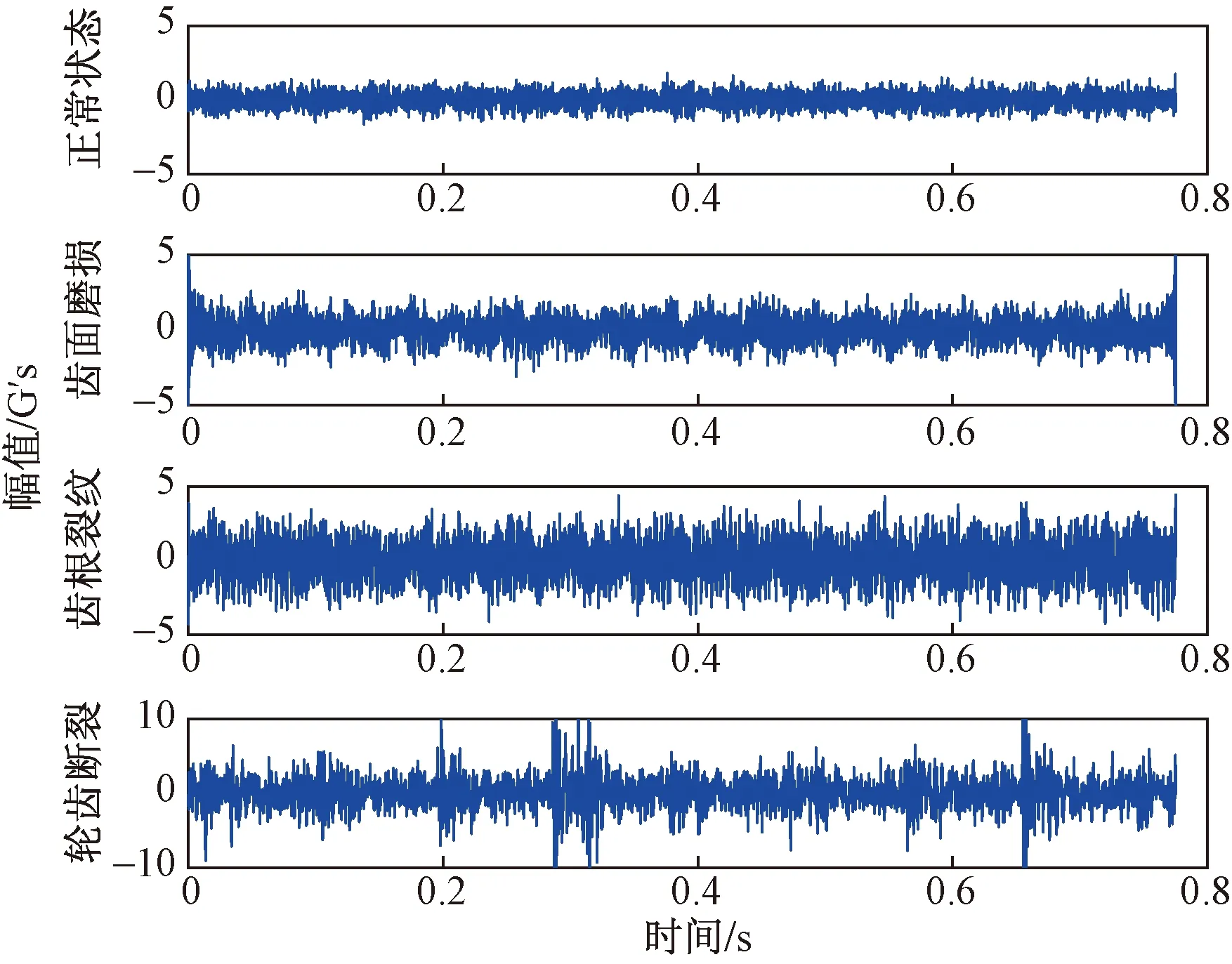
1 G′s=9.8 m/s2圖3 振動信號時域波形Fig.3 Time domain waveform of vibration signal
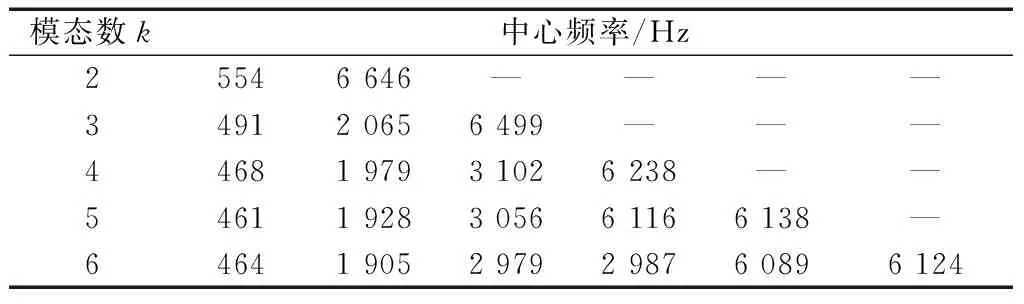
表1 中心頻率
由表1可知,當k≥5時,出現了6 116、6 138、2 979和2 987 Hz頻率相近的分量,信號分解產生過分解,因此確定最佳的模態分解數為4,多次試驗確定懲罰因子α=2 000。圖4為輪齒斷裂運行狀態下的振動信號經過VMD分解后的時域波形,其中本征模態函數(intrinsic mode function,IMF)是分解后的固有模態分量。圖5為分解分量經過傅里葉變換的頻譜圖,截取的頻率范圍為0~8 000 Hz。
求解4種運行狀態下分解后各模態分量信號與原始信號的互相關系數δ,如表2所示。濾去互相關系數<0.1的模態,將互相關系數>0.6的模態直接用作降噪后的信號重構。
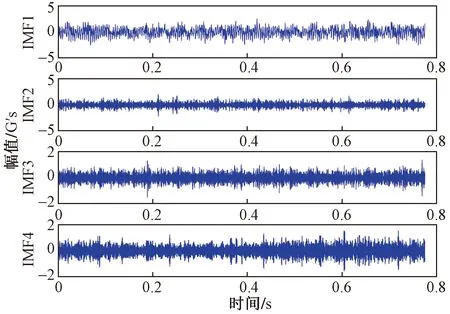
1 G′s=9.8 m/s2圖4 VMD分解后時域波形Fig.4 Time domain waveform after VMD decomposition
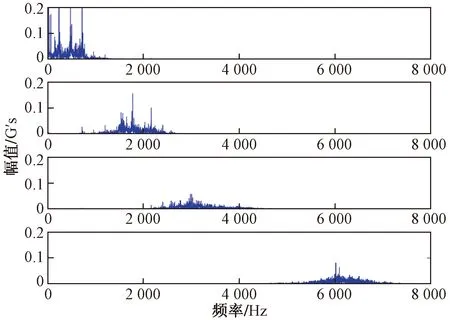
1 G′s=9.8 m/s2圖5 VMD分解后頻譜圖Fig.5 Spectrum after VMD decomposition
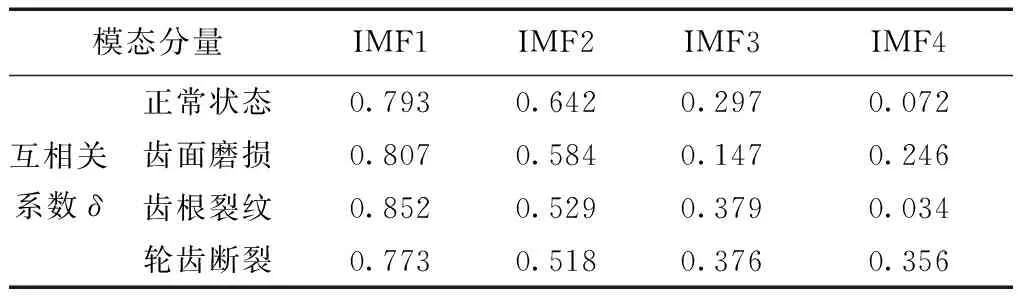
表2 互相關系數
對0.1≤δ≤0.6的分量進行MCKD降噪處理,根據采樣頻率和故障頻率求得解卷積周期為T=fs/fr=42 240 Hz/24.17 Hz=1 750,試驗確定位移數M=7,等步長搜索確定濾波器長度L=640。以輪齒斷裂運行狀態下振動信號經過VMD分解后的模態分量為例進行MCKD降噪,輪齒斷裂-IMF2與降噪后信號的對比如圖6所示。可以看出模態分量經過降噪處理后,信號的周期性沖擊特征凸顯出來,證明降噪效果良好。降噪后信號的頻譜如圖7所示,齒輪轉動頻率fr和嚙合頻率fm兩種頻率的倍頻及其諧波凸顯出來,進一步證明方法具有良好的降噪效果。
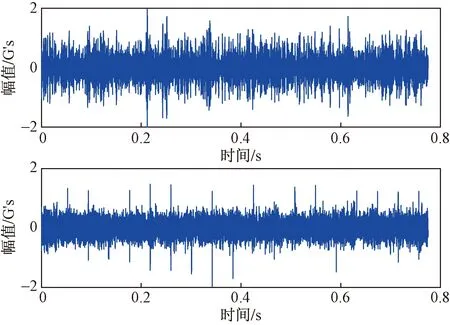
1 G′s=9.8 m/s2圖6 輪齒斷裂-IMF2與降噪后的信號對比Fig.6 The signal contrast between gear fracture-IMF2 and denoise component
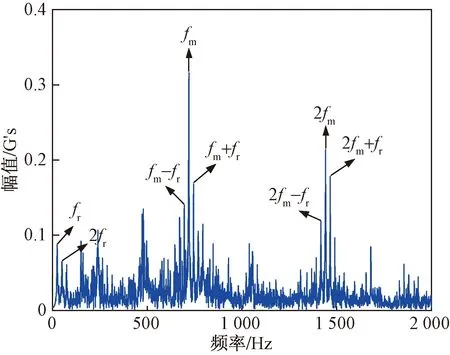
圖7 降噪信號頻譜Fig.7 Spectrum of denoise signal
將δ>0.6的分量與降噪信號進行重構,用于構造DBN網絡模型輸入的特征數據集。
首先對重構信號進行線性歸一化預處理,使其保持在[0,1]。輸入軸的轉速為1 450 r/min。為保證每個數據樣本有1個轉動周期以上的數據點數,設定特征集數據樣本的長度為2 000,對每類故障數據截取1 000組數據樣本構造特征矩陣并定義數據標簽。構造不同比例的數據集如表3所示。
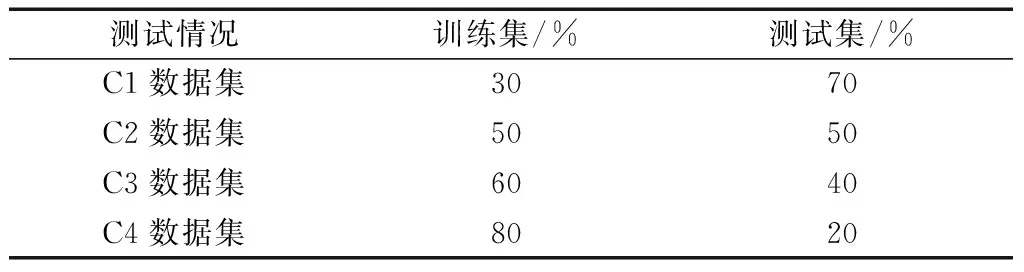
表3 數據集描述
將構造的訓練集輸入到DBN網絡中進行模型訓練。DBN網絡結構選用經典的5層結構,包括輸入層、3個隱含層和輸出層,輸入層節點數由樣本特征維度決定,輸出層節點數由分類數決定,網絡結構設定為2 000-500-120-20-4。由于數據樣本較長,故RBM訓練的迭代次數設定為600,學習速率e為0.5,動量參數τ為0.9,以加快網絡訓練的速度。
首先用堆棧RBM網絡初始化整個模型訓練的權重和偏置值,然后作為DBN反向微調的初始的權重和偏置,利用梯度下降法不斷更新該權重和偏置值,每迭代10次后計算一下故障信號的分類準確率。最后,用最終訓練好的權重和偏置值對劃分好的測試集進行分類。在反向微調過程中,分別用Isigmoid、Sigmoid、Tanh和LRelu函數作為激活函數的故障分類準確率如表4所示。

表4 四種激活函數下的故障分類準確率
由表4可知,DBN的反向微調訓練過程中運用Isigmoid函數作為反向微調的激活函數時,其故障診斷準確率明顯高于其他函數,訓練準確率和測試準確率之間的差異也最小,整個網絡模型具有較高的穩定性和較快的收斂速度,解決了其他3種激活函數進行網絡訓練時產生的梯度消失問題。
t分布隨機領域嵌入(t-distributed stochastic neighbor embedding,t-SNE)是一種非線性特征降維算法,其基本思想是將高維空間數據點映射到低維空間,保持高維空間數據點和對應的低維空間數據點之間的特性不變,非常適用于將高維空間的數據降維至二維或三維空間數據,然后對低維空間數據進行可視化,達到理想的降維效果。為了驗證DBN模型的特征提取能力,分別選用表3所示的不同百分比訓練集和測試集輸入到DBN模型中進行訓練。基于t-SNE特征降維和可視化效果如圖8所示。
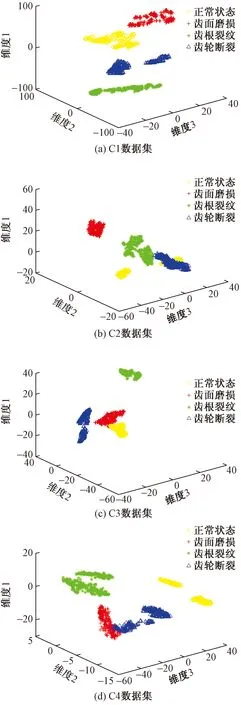
數據無量綱圖8 特征提取可視化圖Fig.8 Feature extraction visualization
由圖8可知,隨著訓練集比例的增加,三維空間內故障特征分布的范圍逐漸縮小,產生聚類效果,不同故障特征分布的距離逐漸增大,故障分類準確率也顯著提高。
為了驗證本文方法的故障診斷效果,分別與EMD-DBN、EMD-SVM、DBN、SVM分類模型進行對比實驗,隨著迭代次數增加分類準確率的變化如圖9所示。
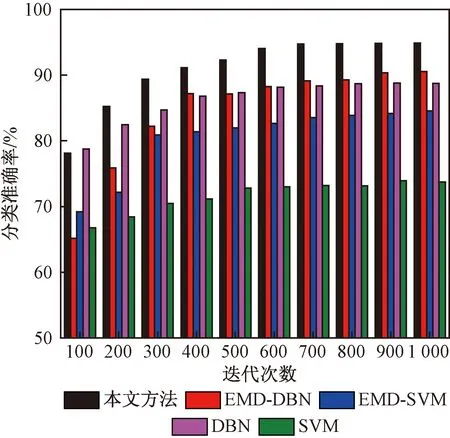
圖9 分類準確率Fig.9 Classification accuracy
由圖9可知,本文方法相比其他4種分類模型始終保持較高的分類準確率,具有更好的穩定性。隨著網絡訓練迭代次數的增加,分類準確率明顯提高。迭代次數達到600后,分類準確率基本保持不變,但網絡訓練所需時間顯著增加,嚴重影響故障診斷的效率。因此,在進行深層網絡模型訓練的過程中,應合理選擇迭代次數,保證模型的實用性,防止網絡訓練出現過擬合的現象。
4 結論
提出基于變分模態分解-最大相關峭度解卷積和深度置信網絡的齒輪箱故障智能診斷方法,并通過油田現場的實際應用,驗證了方法具有很好的魯棒性和實用性,對油田的故障診斷工作具有指導意義。主要結論如下。
(1)VMD通過迭代搜尋確定最佳的中心頻率和頻帶寬度,實現故障信號和噪聲信號在不同頻帶上的有效分離;MCKD以最大相關峭度為目標,通過多次迭代實現信號的解卷積運算,增強被強噪聲掩蓋的故障周期性沖擊成分,故障特征頻率凸顯。
(2)基于VMD-MCKD和DBN的齒輪箱智能診斷方法將傳統故障診斷方法和深度學習相結合,通過對原始信號進行降噪濾波和深層網絡模型訓練,實現了故障特征自適應挖掘與故障模式的智能識別,達到了較高的分類準確率。
(3)通過增加網絡模型的訓練集比例,故障特征分布范圍逐漸縮小,聚類效果增強,隨著網絡迭代次數的增加,故障分類準確率顯著提高,且高于文中其他幾種分類模型,但應合理選擇網絡訓練迭代次數,保證模型的應用效果。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
電子制作(2018年11期)2018-08-04 03:25:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
汽車維修與保養(2015年6期)2015-04-17 03:31:50
上海電機學院學報(2015年4期)2015-02-28 14:30:00
汽車維護與修理(2015年2期)2015-02-28 12:15:39
