汽車動態底盤控制系統多模式垂向控制及實車驗證
2020-11-09 03:38:24張亮修吳光強魏新輝
科學技術與工程 2020年27期
關鍵詞:控制策略
張亮修, 吳光強, 魏新輝
(1.上海保隆汽車科技股份有限公司, 上海 201619; 2.同濟大學汽車學院, 上海 201804)
動態底盤控制(dynamic chassis control,DCC)系統亦稱自適應底盤控制系統,能夠針對路面行駛工況和駕駛員需求實現4個阻尼連續可調半主動懸架阻尼力的自適應可變調整,將汽車底盤調節成舒適、標準和運動3種模式,有效平衡汽車操穩性與舒適性技術難題,但目前中國對此系統尤其是控制策略缺乏足夠了解。
許多學者對半主動懸架控制方法開展了大量研究,主要有天棚控制[1]、最優控制[2]、滑模控制[3]、自適應控制[4]、模糊控制[5]、分數階控制[6]和模型預測控制[7]等。文獻[8-9]開展了阻尼可調半主動懸架的臺架和實車道路試驗。總體來言,現有研究多偏向理論,缺乏工程應用,尤其是針對多種模式可調的DCC系統,并未提出明確可行的控制策略,以及進行相應的實車驗證。為此,在研究經典天棚和地棚控制的基礎上,提出改進天棚控制策略,將其分別實施于DCC系統舒適、運動和標準3種模式的控制,自主完成DCC控制器的開發、匹配和標定,進行整車級的道路實車對比驗證,為DCC系統國產化提供參考。
1 半主動懸架1/4車輛建模
圖1為1/4車輛模型。圖1(a)為被動懸架,懸架剛度ks和阻尼系數cs為定值;圖1(b)為裝有阻尼可調減振器的半主動懸架,ud為減振器可控阻尼力,能夠根據實際行駛路況連續可調。
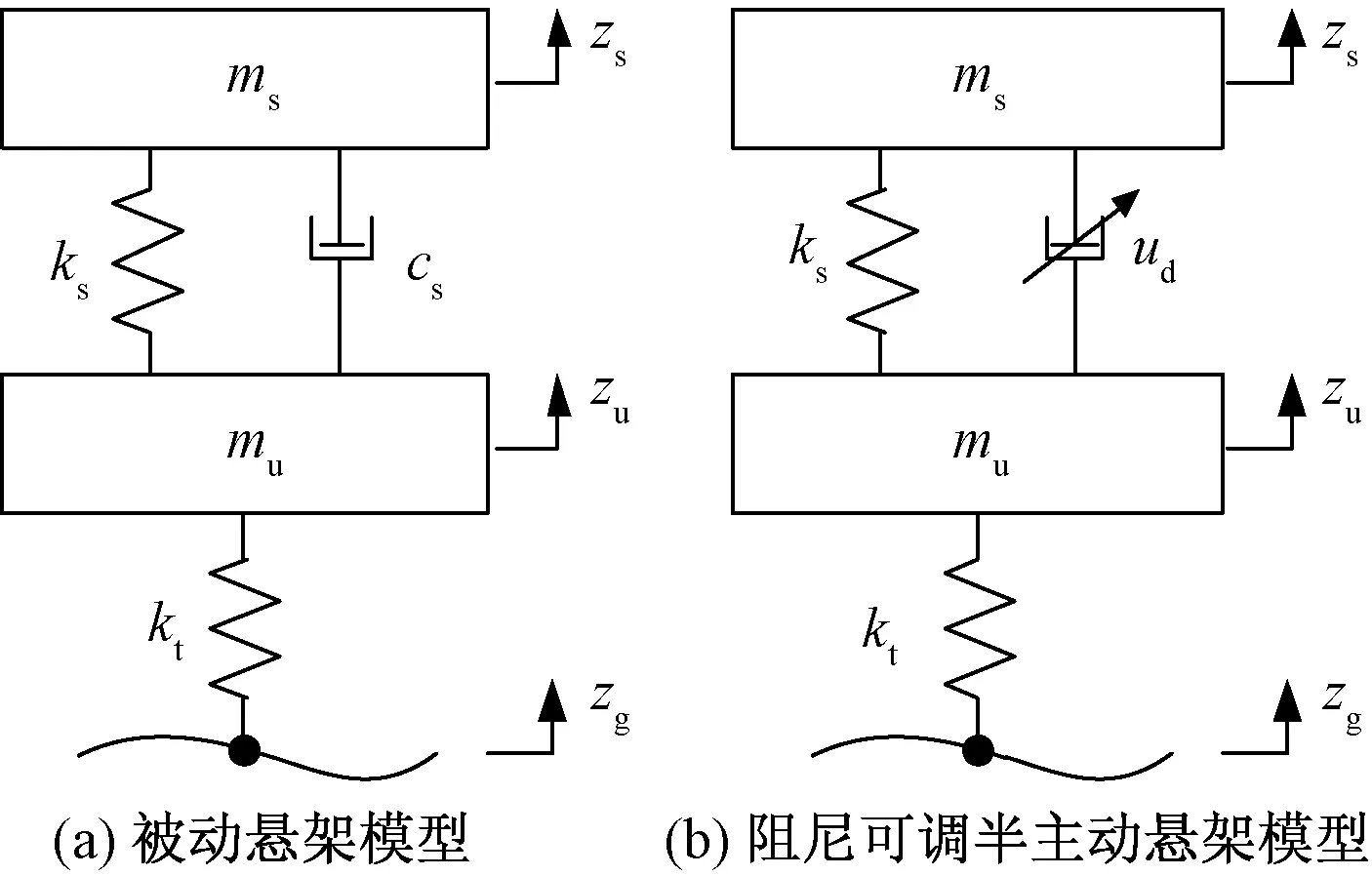
ms為簧上質量;mu為簧下質量;ks為彈簧剛度;cs為被動懸架阻尼系數;kt為輪胎垂向剛度;zs、zu和zg分別為簧上質量、簧下質量和路面輸入的垂向位移圖1 1/4車輛模型Fig.1 1/4 vehicle models
為便于后述控制策略描述,建立阻尼可調半主動懸架動力學方程如式(1)所示:
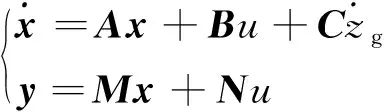
(1)
2 多模式垂向控制策略設計
針對DCC系統的3種不同的模式需求,采用3種不同的垂向控制策略,如圖2所示。
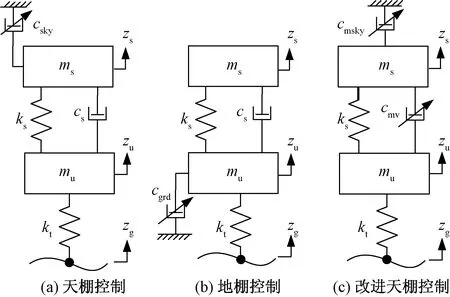
csky為理想天棚阻尼系數;cgrd為地棚阻尼系數;cmsky為對應天棚阻尼系數;cmv為可變阻尼虛擬系數圖2 半主動懸架垂向控制示意圖Fig.2 Vertical control diagram of semi-active suspension
2.1 天棚控制策略
天棚控制最早由Karnopp提出[1],用于提升乘坐舒適性。之所以稱為天棚控制,是因為汽車簧上質量與慣性參考系之間具有天棚阻尼力,如圖2(a)所示,理想天棚阻尼力為

(2)
式(2)中,Fd,sky為理想天棚阻尼力;csky為理想天棚阻尼系數,csky>0。
(3)
式(3)中,ud,sky為實際天棚控制力;Fd,max和Fd,min分別為實際減振器最大作用力和最小作用力。
2.2 地棚控制策略
地棚控制與天棚控制相反,主要是控制輪胎垂向動載荷,提高車輛操穩性[10],如圖2(b)所示,理想的地棚阻尼力為
(4)
式(4)中:Fd,grd為理想地棚阻尼力;cgrd為地棚阻尼系數,cgrd>0。
同樣,理想地棚阻尼力Fd,grd也難以實現,需要通過控制實際減振器的阻尼特性來模擬地棚控制效果,實際地棚控制力為
(5)
式(5)中:ud,grd為實際地棚控制力。
2.3 改進天棚控制策略
天棚控制作以提升車輛的平順性為主,但會影響車輛操縱穩定性,而地棚控制主要用于控制輪胎動載荷,忽略了車輛平順性。為了改善由天棚控制導致的車輪動載惡化,提出改進天棚控制策略[11],如圖2(c)所示,理想的改進天棚阻尼力為

(6)
式(6)中:Fd,msky為理想的改進天棚阻尼力;cmsky和cmv分別為對應天棚阻尼系數和可變阻尼虛擬系數,且滿足cmsky>0、cmv>0。
為了得到改進天棚阻尼系統cmsky和cmv,首先基于全局最優的線性二次型調節器(LQR)方法得到對應主動懸架的最優主動阻尼力,然后通過最小化改進天棚控制阻尼力和LQR最優阻尼力之間的差值,得到改進天棚阻尼系數。
定義綜合描述車輛平順性和操穩性的性能指標:

wt(zu-zg)2+ru2]dt
(7)
式(7)中:T為積分時間;t表示對時間積分;wa、ws、wt分別為車身垂向振動加速度、懸架動行程和輪胎動位移的加權系數;r為控制輸入加權系數,用于限制控制量的抖動。
根據狀態方程[式(1)],性能指標如式(8)所示:

(8)
式(8)中:W=diag[wa,ws,wt];Q1=MTWM;Q2=MTWN;R1=NTWN+r。

(9)
式(9)中:P為正定矩陣。
求得的LQR反饋控制增益及最優控制力為

(10)

(11)
將改進天棚阻尼力[式(6)]以負反饋形式表示,即
Fd,msky=-Kmsky·z
(12)

反饋狀態變量z與x之間滿足
z=Hx
(13)
將式(13)代入式(11),得到以x為反饋狀態變量的改進天棚阻尼力:
Fd,msky=-Kmsky·H·x
(14)
對比式(11)、式(14),改進天棚控制增益Kmsky可以通過最小化式(15)范數[12]得

(15)

則改進天棚阻尼控制增益為

(16)
ud,msky=
(17)
式(17)中:ud,msky為實際改進天棚控制力。
2.4 多模式垂向控制策略實施
對于舒適模式,主要以提高舒適性為目的,采用經典的天棚控制;對于運動模式,主要以提高操穩性為目的,采用地棚控制;而對于標準模式,則采用改進天棚控制策略,同時兼顧舒適性和操穩性。
天棚阻尼系數和地棚阻尼系數在大量仿真數據基礎上選定,通過綜合比較不同阻尼系數時的車輛振動響應量均方根值,取天棚阻尼系數csky=2 500,地棚阻尼系數cgrd=3 000。改進天棚控制增益是通過最小化LQR最優主動阻尼力和改進天棚控制阻尼力之間的差值得到,改進天棚阻尼系數為cmsky=2 125,cmv=120。
式(3)、式(5)、式(17)所述阻尼控制力需轉化為電流信號才能作為DCC實際控制器的輸出。圖3為通過減振器臺架試驗實測的阻尼特性曲線,在阻尼力已知時,結合減振器相對運動速度通過插值就可獲得對應的控制電流。
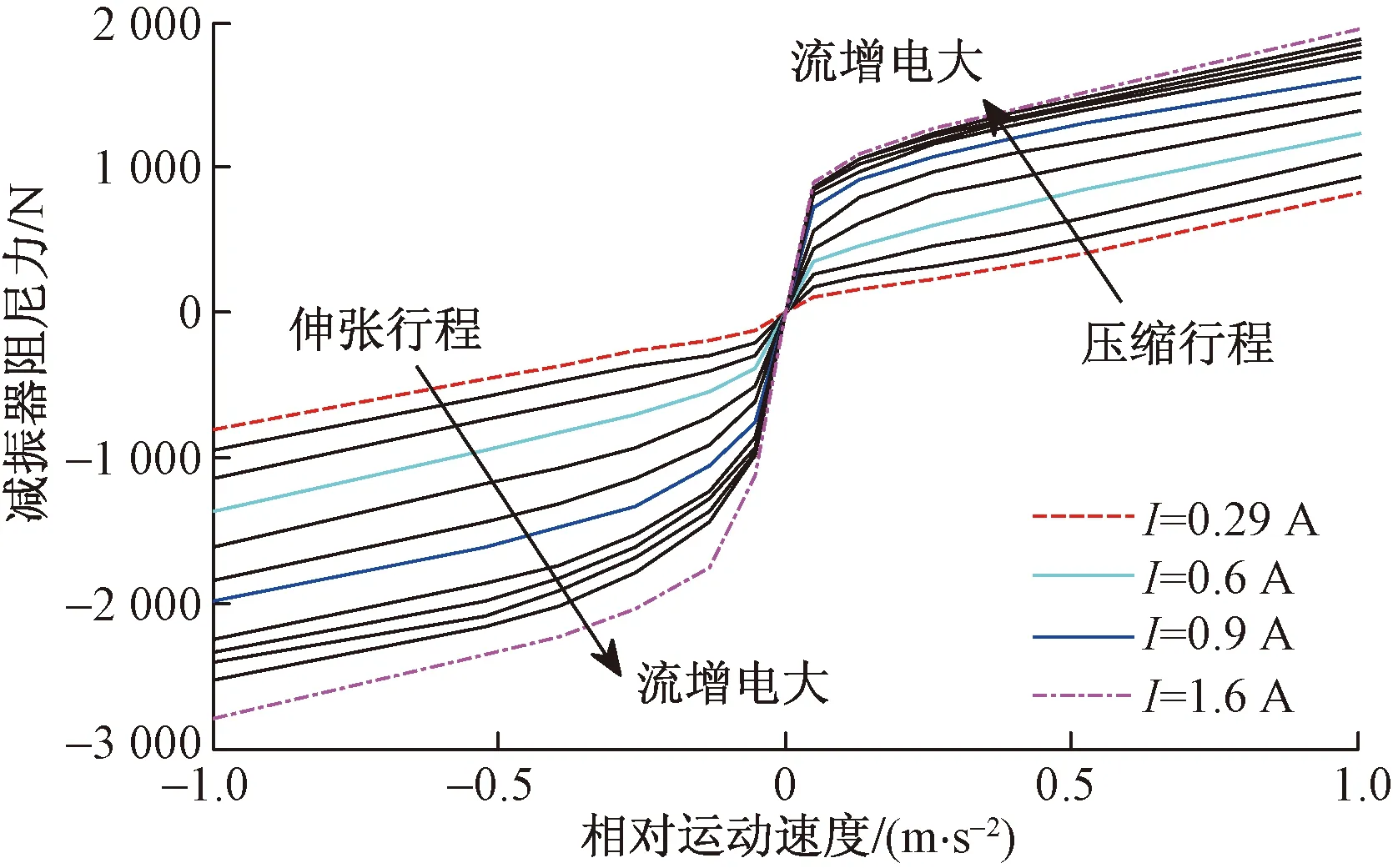
I為控制電流圖3 減振器阻尼特性Fig.3 Damper characteristics of shock absorber
3 結果驗證
3.1 仿真驗證
基于Carsim/Simulink搭建聯合仿真平臺,分別在A、B、C三級路面,車速依次為30、60、90、120 km/h。為便于結果分析,3種模式下的結果分別用舒適、標準、運動表示。
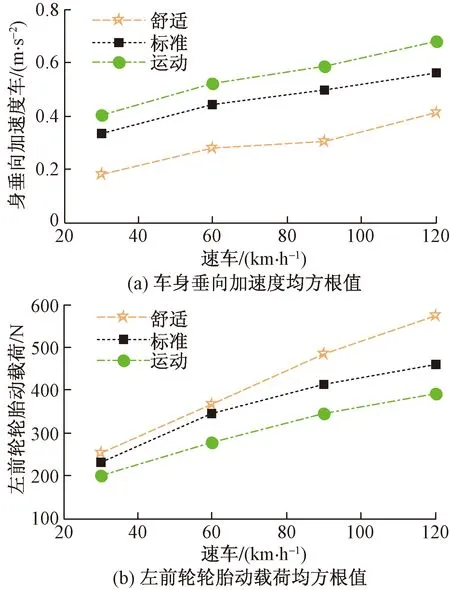
圖4 B級路面振動響應量均方根值Fig.4 RMS value of vibration response under level B pavement
圖4為B級路面不同車速下的振動響應量均方根值。由圖4(a)可知,與標準模式相比,舒適模式下的車身垂向加速度較小,而運動模式下的數值較大。由圖4(b)可知,運動模式時輪胎動載荷最小,其次是標準模式,而舒適模式下的輪胎動載荷最大。分析其原因為:舒適模式采用經典天棚控制,僅以車身垂向速度為反饋狀態量,故車身垂向加速度較小,而輪胎動載荷較大;運動模式采用地棚控制,以輪胎垂向速度為反饋狀態量,故輪胎動載荷較小,而車身垂向加速度較大;標準模式采用改進天棚控制,同時把車身垂向速度和懸架相對運動速度作為反饋狀態量,其控制效果介于舒適模式和運動模式之間。總的來看,隨著車速的升高,振動響應量的均方根數值呈上升態勢。
圖5為車速90 km/h時在不同路面等級下的振動響應量均方根值,從圖5可以看出,隨著路面等級的升高(A~C級),振動響應量的均方根數值均呈上升態勢。
3.2 實車驗證
自主完成DCC控制器開發、匹配和標定,并與原車自帶控制器和被動減振器進行控制效果對比。圖6為試驗車輛和自主研發控制器實物圖。
3.2.1 隨機路面工況
試驗車輛分別以40、60、80 km/h駛過試驗路段,表1為80 km/h時的加權加速度均方根值。從表1可以看出,自主研發控制器的控制效果明顯優于被動減振器和原車控制器,其中在標準模式下與原車控制器相比,駕駛員座椅面和后排座椅面的數值分別減小了8.93%、11.79%。
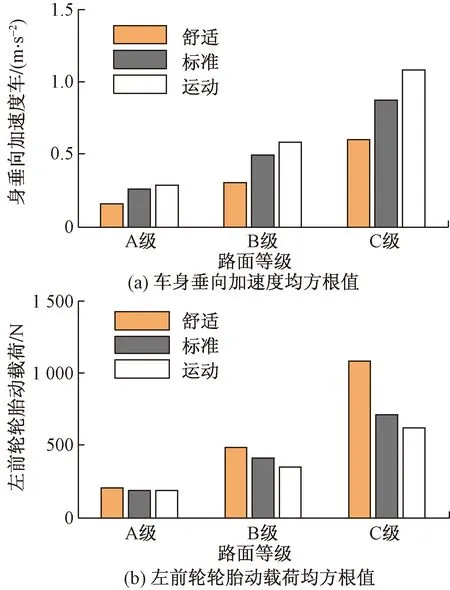
圖5 在不同路面等級下的振動響應量均方根值Fig.5 Root mean square value of vibration response under different road levels

圖6 試驗車輛和自主研發控制器Fig.6 Test vehicle and self-developed controller
3.2.2 減速帶工況
試驗車輛分別以20、40、60 km/h通過指定減速帶。根據國家標準《汽車平順性試驗方法》(GB/T 4970—2009),減速帶工況(脈沖輸入)下的行駛評價指標用最大(絕對值)加速度響應來表示,即
(18)

按照式(18)計算不同車速和不同模式下的行駛評價指標,結果如表2~表4所示,與原車控制器相比,在自主研發控制器作用下,車輛不同測量位置的最大(絕對值)加速度響應值都明顯減小,其中在標準模式下,車速為60 km/h時,駕駛員座椅面和后排座椅面的數值分別減小了8.29%、9.02%。故在減速帶工況驗證了控制策略和所研發控制器軟、硬件的可行性。
4 結論
(1)設計了針對DCC多種模式的垂向控制策略,自主完成控制器的開發、匹配和標定,進行了整車級的道路實車對比驗證,為DCC系統國產化提供參考。
(2)建立了半主動懸架1/4車輛模型,研究經典天棚和地棚控制算法,并在此基礎上提出改進天棚控制策略,將其分別實施于動態底盤控制系統的舒適、運動和標準3種模式。
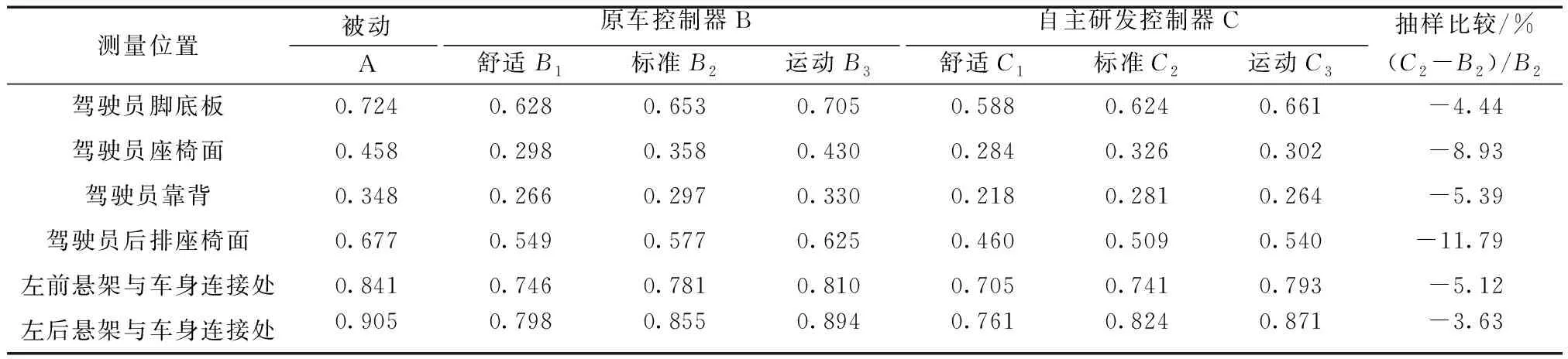
表1 隨機路面工況車速80 km/h時加權加速度均方根值
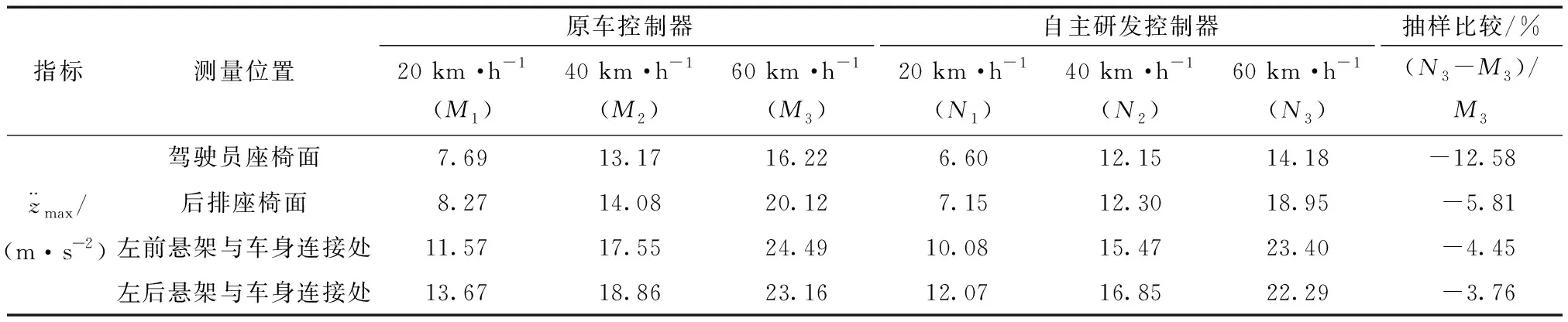
表2 減速帶工況定量統計結果(舒適模式)
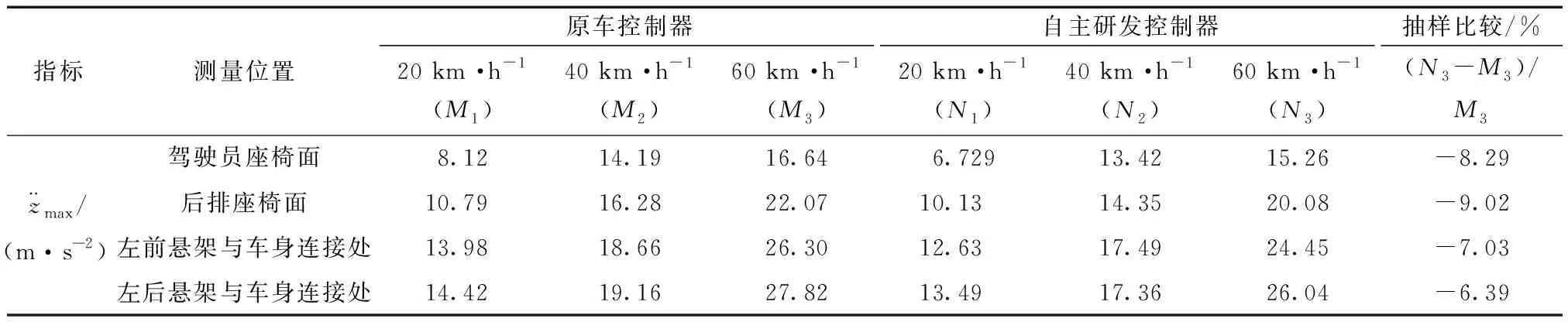
表3 減速帶工況定量統計結果(標準模式)
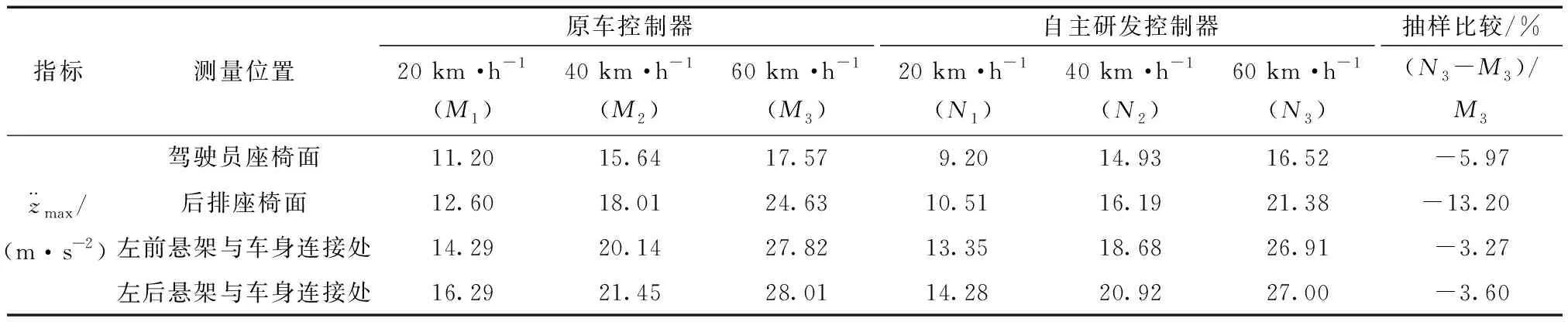
表4 減速帶工況定量統計結果(運動模式)
(3)仿真和實車道路驗證結果表明,所提出的控制方案滿足DCC系統多種模式可調的需求,并在某些模式下明顯優于被動減振器和原車控制器。
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36
