基于多傳感器融合的車載運(yùn)動(dòng)模型研究
2020-10-21 11:01:20王志杰
科學(xué)導(dǎo)報(bào)·學(xué)術(shù) 2020年8期
關(guān)鍵詞:多傳感器
王志杰


摘? 要:本項(xiàng)目旨在通過誤差補(bǔ)償技術(shù)提高INS單獨(dú)使用過程中的精度,使車輛能在慣性導(dǎo)航系統(tǒng)單獨(dú)作用下實(shí)現(xiàn)盡可能久的高精度導(dǎo)航,建立相應(yīng)運(yùn)動(dòng)模型并對(duì)SINS誤差特性進(jìn)行分析。
關(guān)鍵詞:多傳感器;旋轉(zhuǎn)調(diào)制技術(shù);誤差特性分析;Kalman
一、旋轉(zhuǎn)調(diào)制技術(shù)
(一)介紹
對(duì)傳統(tǒng)數(shù)據(jù)處理方法的研究中,意識(shí)到誤差急劇發(fā)散的主要原因之一是由對(duì)加速度、角速度的積分操作導(dǎo)致的。由于安裝時(shí)可能引入的安裝誤差,以及載體行駛時(shí)不可避免地在加速度測(cè)量值和角速度上引入噪聲,最終演算結(jié)果與實(shí)際存在極大的誤差。
(二)旋轉(zhuǎn)調(diào)制技術(shù)原理
旋轉(zhuǎn)調(diào)制技術(shù)通過將安裝在旋轉(zhuǎn)機(jī)構(gòu)上,利用旋轉(zhuǎn)機(jī)構(gòu)帶動(dòng) 進(jìn)行周期性的翻滾、旋轉(zhuǎn)和停位運(yùn)動(dòng),以改變其常值偏差沿導(dǎo)航坐標(biāo)系的投影形式,進(jìn)而抵消器件誤差對(duì)系統(tǒng)各導(dǎo)航誤差的影響。本文研究過程中將采用連續(xù)旋轉(zhuǎn)策略,工作方式具備以下兩個(gè)重要優(yōu)勢(shì):(1)避免了轉(zhuǎn)停過程中加速度突變對(duì)狀態(tài)方程建模的不利影響。(2)通過連續(xù)旋轉(zhuǎn)的的方式,可以將MIMU固定在車輪上,依附于車輛固有的旋轉(zhuǎn)機(jī)構(gòu),無(wú)需附加轉(zhuǎn)停器械。
(三)安裝方法
選擇慣性測(cè)量元件:JY61傾角儀6軸加速度計(jì)/陀螺儀模塊
(四)數(shù)據(jù)處理
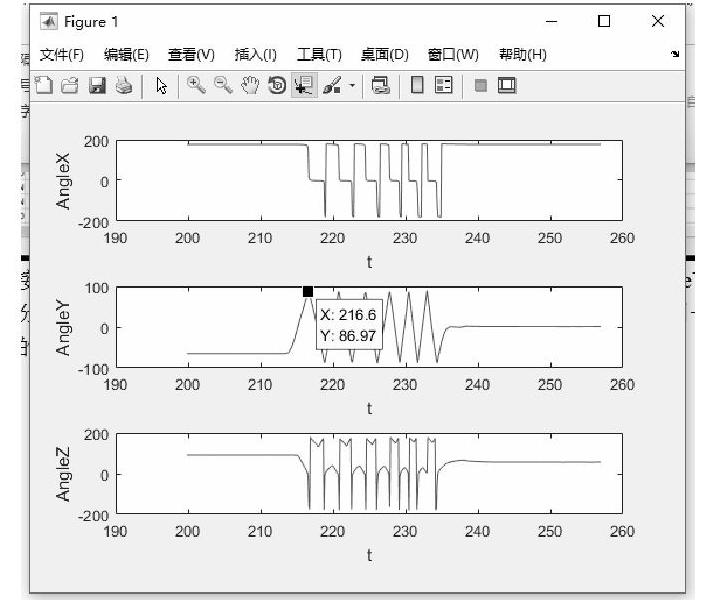
由圖可見,由于車輪的旋轉(zhuǎn),導(dǎo)致x_s、z_s軸的測(cè)量數(shù)值呈現(xiàn)周期性變化,且理論變化范圍是-180度到180度。AngelY可以直接與車輪旋轉(zhuǎn)角度相關(guān)聯(lián),且其理論變化范圍是-90度到90度,通過求任一時(shí)間微元內(nèi)行進(jìn)距離,即可求出任一時(shí)間點(diǎn)車輛的行駛路程,求路程的關(guān)鍵點(diǎn)在于準(zhǔn)確得到任意時(shí)刻AngleY的相位變化。
二、Kalman濾波仿真
基于SINS誤差解算方程、旋轉(zhuǎn)調(diào)制技術(shù)思想,本文以速度、位置、姿態(tài)建立9維狀態(tài)量,通過kalman濾波技術(shù)實(shí)現(xiàn)對(duì)加速度計(jì)測(cè)量數(shù)據(jù)與角速度測(cè)量數(shù)據(jù)的的融合,取得了較優(yōu)的測(cè)量結(jié)果。
模擬環(huán)境如下:(1)車輛以加速度向東向作直線運(yùn)動(dòng);(2)加速度計(jì)陀螺儀安裝在車輪內(nèi)側(cè),安裝點(diǎn)距車軸0.5m;(3)初始狀態(tài)下加速度計(jì)陀螺儀三軸指向與導(dǎo)航系(東北天坐標(biāo)系)重合;(4)系統(tǒng)噪聲為方差的白噪聲,量測(cè)噪聲為方差的白噪聲。(5)模擬時(shí)長(zhǎng)為2000s;
運(yùn)行結(jié)果如下:
圖中,灰色曲線為速度理論值,藍(lán)色曲線為未作濾波處理組的速度計(jì)算值,紅色曲線為經(jīng)kalman濾波組的速度計(jì)算值。
真實(shí)值(灰色曲線)與kalman濾波預(yù)測(cè)值(紅色曲線)間差距很小,旋轉(zhuǎn)調(diào)制數(shù)據(jù)經(jīng)由kalman濾波處理后與真實(shí)值差距很小;反觀圖1可以看到,當(dāng)導(dǎo)航持續(xù)1000s時(shí),真實(shí)值速度增加至500m/s,而僅做旋轉(zhuǎn)調(diào)制未做kalman濾波處理的對(duì)比組速度增加至335.9m/s,與真實(shí)值存在極大沖突。
參考文獻(xiàn)
[1]? 劉建業(yè).導(dǎo)航系統(tǒng)理論與應(yīng)用.西安:西北工業(yè)大學(xué)出版社.2010.3
[2]? 王秋瀅.船用調(diào)制型慣性導(dǎo)航及其組合導(dǎo)航技術(shù).北京:國(guó)防工業(yè)出版社.2017.3
猜你喜歡
電腦知識(shí)與技術(shù)(2017年4期)2017-04-10 07:18:48
電子技術(shù)與軟件工程(2016年16期)2017-03-17 00:34:04
現(xiàn)代電子技術(shù)(2016年24期)2017-01-19 14:56:30
計(jì)算機(jī)應(yīng)用(2016年12期)2017-01-13 20:34:22
現(xiàn)代電子技術(shù)(2016年22期)2016-12-26 09:49:39
電腦知識(shí)與技術(shù)(2016年12期)2016-06-14 01:29:49
科技視界(2016年14期)2016-06-08 13:24:00
現(xiàn)代電子技術(shù)(2015年14期)2015-07-22 22:03:52
物聯(lián)網(wǎng)技術(shù)(2015年5期)2015-07-18 13:08:22
現(xiàn)代電子技術(shù)(2014年24期)2014-12-18 11:53:51