集中式雷達(dá)-紅外傳感器數(shù)據(jù)融合多目標(biāo)跟蹤算法
2020-10-21 01:37:54張安清張萬(wàn)順齊海明
艦船電子對(duì)抗 2020年4期
張安清,張萬(wàn)順,齊海明
(1.海軍大連艦艇學(xué)院,遼寧 大連 116018;2.解放軍91202部隊(duì),遼寧 葫蘆島 125004)
0 引 言
在現(xiàn)代C4ISR作戰(zhàn)系統(tǒng)中,要想掌握信息化戰(zhàn)場(chǎng)主控權(quán),占據(jù)戰(zhàn)場(chǎng)優(yōu)勢(shì),做到“看得明、反應(yīng)快、打得準(zhǔn)”,要求作戰(zhàn)方必須極其重視信息數(shù)據(jù)的獲取、采集和處理,占得信息優(yōu)勢(shì)權(quán)。現(xiàn)代的戰(zhàn)場(chǎng)空間環(huán)境越來(lái)越復(fù)雜,已經(jīng)擴(kuò)展到陸、海、空、天、電磁五維作戰(zhàn)體系,僅僅利用單一傳感器不能滿足新的作戰(zhàn)需求,必須運(yùn)用多傳感器獲取戰(zhàn)場(chǎng)信息,進(jìn)行多傳感器信息融合[1](MSIF),充分利用多傳感器或多源數(shù)據(jù)的互補(bǔ)性和冗余性提高數(shù)據(jù)質(zhì)量,獲取精確的戰(zhàn)場(chǎng)信息和準(zhǔn)確的戰(zhàn)場(chǎng)態(tài)勢(shì)。
艦載防空反導(dǎo)系統(tǒng)裝備了雷達(dá)系統(tǒng)和光電系統(tǒng),與同質(zhì)傳感器融合相比,異質(zhì)傳感器融合系統(tǒng)能更加充分地發(fā)揮出傳感器間的性能優(yōu)勢(shì)[2],同時(shí)發(fā)揮好應(yīng)用環(huán)境的互補(bǔ)作用。雷達(dá)作為主動(dòng)傳感器,可以提供完整、高精度的目標(biāo)位置信息;但由于工作時(shí)需輻射大功率的電磁波,容易受到電子干擾以及反艦彈道的攻擊;同時(shí),由于隱身技術(shù)的發(fā)展與低空盲區(qū)及高海雜波的影響,導(dǎo)致雷達(dá)探測(cè)距離受到限制,使其作戰(zhàn)效果下降[3-4]。而以紅外傳感器為代表的被動(dòng)傳感器具有不向空中輻射能量,被動(dòng)隱蔽性好、目標(biāo)識(shí)別能力強(qiáng)、測(cè)角精度高以及較強(qiáng)的抗干擾能力等優(yōu)勢(shì);但探測(cè)距離較近,易受氣候影響,不能提供目標(biāo)與傳感器的相對(duì)距離[5]。因此,有效地將雷達(dá)與紅外2種傳感器配合使用,彼此補(bǔ)充,發(fā)揮出雷達(dá)的高精度距離測(cè)量和紅外傳感器的高精度方位角測(cè)量[6],能夠提供更準(zhǔn)確的目標(biāo)位置估計(jì),改善目標(biāo)識(shí)別能力,增強(qiáng)系統(tǒng)的抗干擾能力以及系統(tǒng)可靠性。
現(xiàn)有的雷達(dá)-紅外融合跟蹤方法中,文獻(xiàn)[7]將雷達(dá)的距離信息與紅外角度信息組合成為新量測(cè),完全忽略了雷達(dá)的角度信息;文獻(xiàn)[8]基于集中式融合結(jié)構(gòu),提出了拉格朗日數(shù)乘法的最優(yōu)加權(quán)融合算法;文獻(xiàn)[9]在雷達(dá)-紅外量測(cè)不同步的條件下進(jìn)行了傳感器的切換,提高了采樣頻率,不過(guò)本質(zhì)還是單傳感器的跟蹤方法。本文構(gòu)建了雷達(dá)-紅外傳感器融合系統(tǒng)的可行結(jié)構(gòu),引入概率假設(shè)密度(PHD)濾波,實(shí)現(xiàn)多目標(biāo)跟蹤的同時(shí)避免了復(fù)雜的數(shù)據(jù)關(guān)聯(lián),導(dǎo)出紅外傳感器量測(cè)擴(kuò)維方法,實(shí)現(xiàn)雷達(dá)-紅外傳感器量測(cè)優(yōu)化加權(quán)融合。
1 集中式雷達(dá)-紅外量測(cè)融合
1.1 多傳感器觀測(cè)模型
多傳感器融合目標(biāo)跟蹤算法可以獲得更高的狀態(tài)估計(jì)精度,但算法復(fù)雜,運(yùn)行時(shí)間長(zhǎng),考慮實(shí)時(shí)性,對(duì)量測(cè)數(shù)據(jù)的處理采取集中式量測(cè)融合(CMF)[10]的方法。假定艦載雷達(dá)和紅外系統(tǒng)同地配置,已通過(guò)坐標(biāo)轉(zhuǎn)換,時(shí)空配準(zhǔn)與同步,其融合系統(tǒng)的線性離散系統(tǒng)方程表示為:
xk=Fkxk-1+vk-1
(1)
雷達(dá)-紅外傳感器的量測(cè)模型方程為:
(2)

(3)


(4)
紅外傳感器量測(cè)表示為:
(5)

(6)
1.2 雷達(dá)-紅外數(shù)據(jù)加權(quán)融合
構(gòu)造雷達(dá)-紅外量測(cè)數(shù)據(jù)融合的結(jié)構(gòu)如圖1所示,避免因雷達(dá)方位角量測(cè)不準(zhǔn)而舍棄造成目標(biāo)信息丟失的問(wèn)題,又得到最優(yōu)加權(quán)融合后的量測(cè)精度的顯著提高,獲得優(yōu)于單一傳感器的量測(cè)精度。
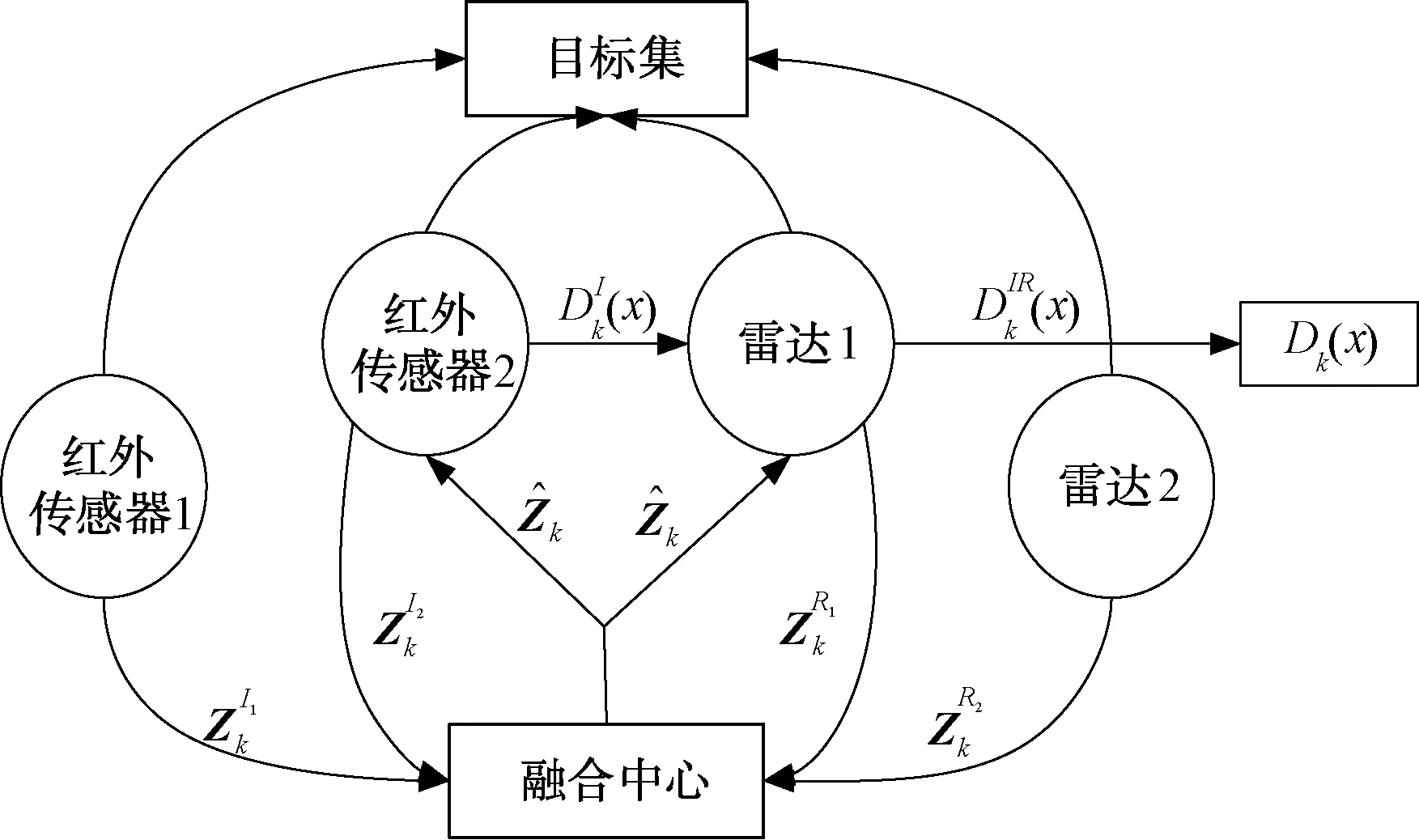
圖1 集中式雷達(dá)-紅外傳感器融合結(jié)構(gòu)
對(duì)k時(shí)刻所有量測(cè)數(shù)據(jù)進(jìn)行加權(quán)融合處理,即:
(7)

相應(yīng)對(duì)k時(shí)刻所有的量測(cè)噪聲數(shù)據(jù)進(jìn)行加權(quán)融合處理,即:
(8)
(9)
特別指出,因紅外傳感器無(wú)法獲取目標(biāo)距離量測(cè)數(shù)據(jù),不能直接完成傳感器的數(shù)據(jù)融合,為避免紅外傳感器量測(cè)數(shù)據(jù)傳統(tǒng)補(bǔ)零擴(kuò)維造成估計(jì)誤差協(xié)方差陣的非正定,本文將雷達(dá)的距離量測(cè)直接作為紅外傳感器的虛擬距離量測(cè),實(shí)現(xiàn)紅外傳感器的量測(cè)擴(kuò)維,擴(kuò)維后的紅外混合量測(cè)為:
(10)

(11)

2 PHD濾波融合跟蹤過(guò)程
本文采用多模型PHD濾波算法[11-14]進(jìn)行融合目標(biāo)跟蹤,將單傳感器PHD濾波器的狀態(tài)濾波結(jié)果,按照集中式融合結(jié)構(gòu),根據(jù)順序依次更新多個(gè)單傳感器PHD濾波算法,濾波過(guò)程如下:


(12)
(13)
(14)

(15)
3 仿真分析
3.1 仿真參數(shù)設(shè)定

3.2 仿真結(jié)果分析
圖2所示是仿真建立的目標(biāo)運(yùn)動(dòng)軌跡和雷達(dá)-紅外融合跟蹤濾波軌跡對(duì)比。圖3、圖4為目標(biāo)1、目標(biāo)2 在20次仿真的3個(gè)坐標(biāo)方向雷達(dá)、紅外單獨(dú)跟蹤與融合跟蹤濾波誤差總和均方根值(RMSE)對(duì)比效果。從圖3、圖4中看出雷達(dá)-紅外融合跟蹤精度對(duì)比單傳感器觀察跟蹤明顯高出很多,表明本文研究的集中式雷達(dá)-紅外融合PHD濾波算法有效、適用,而雷達(dá)或紅外傳感器觀測(cè)跟蹤目標(biāo)的精度與目標(biāo)相對(duì)位置有關(guān),采用多傳感器融合跟蹤恰恰能夠綜合各單傳感器優(yōu)勢(shì),實(shí)現(xiàn)信息互補(bǔ),精確估計(jì)目標(biāo)狀態(tài)。
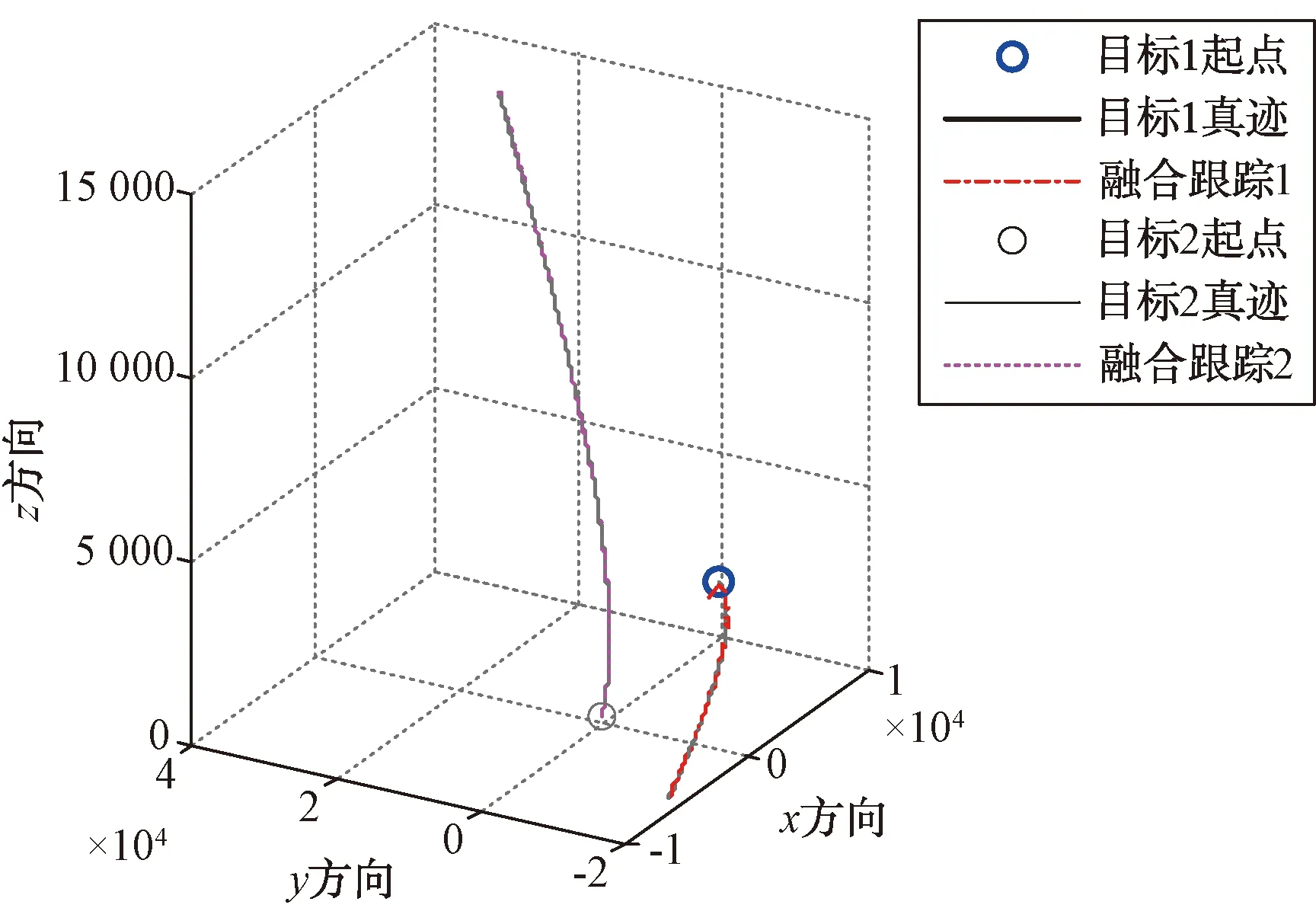
圖2 雷達(dá)-紅外融合跟蹤濾波效果
4 結(jié)束語(yǔ)
針對(duì)被動(dòng)紅外觀測(cè)系統(tǒng)隱蔽性好、不易受電子干擾、低空探測(cè)性能好、角度量測(cè)精度高等優(yōu)點(diǎn),以及雷達(dá)觀測(cè)系統(tǒng)的測(cè)距精度較高,但角度量測(cè)精度低等特點(diǎn),研究二者配合使用實(shí)現(xiàn)信息互補(bǔ),對(duì)目標(biāo)進(jìn)行精確狀態(tài)估計(jì),提高系統(tǒng)可靠性和穩(wěn)定性。本文開(kāi)展基于雷達(dá)和紅外多傳感器融合跟蹤研究,構(gòu)建了雷達(dá)-紅外傳感器融合系統(tǒng)的可行結(jié)構(gòu),為發(fā)揮雷達(dá)和紅外傳感器各自優(yōu)勢(shì),導(dǎo)出紅外傳感器量測(cè)擴(kuò)維方法,實(shí)現(xiàn)雷達(dá)-紅外傳感器量測(cè)優(yōu)化加權(quán)融合,并采用PHD濾波算法,實(shí)現(xiàn)對(duì)多目標(biāo)同時(shí)跟蹤。計(jì)算機(jī)MATLAB仿真驗(yàn)證表明,所構(gòu)建的融合系統(tǒng)及多傳感器量測(cè)融合方法能夠?qū)崿F(xiàn)高精度的多目標(biāo)跟蹤,對(duì)將來(lái)的多目標(biāo)跟蹤系統(tǒng)技術(shù)革新會(huì)有很好的工程應(yīng)用價(jià)值,對(duì)于解決異類(lèi)多傳感器目標(biāo)跟蹤估計(jì)問(wèn)題具有重要的現(xiàn)實(shí)意義。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年1期)2021-03-19 08:28:38
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
無(wú)線電工程(2020年11期)2020-10-29 01:25:46
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46