基于特殊任務的預警機預警能力評估
2020-10-21 01:37:28張杲旻姜志敏李靈芝
艦船電子對抗 2020年4期
關鍵詞:能力
張杲旻,姜志敏,李靈芝,胡 彪
(空軍預警學院,湖北 武漢 430019)
0 引 言
預警機是一種大型、全天候、多傳感器空中預警與指揮控制飛機, 比地面雷達具有更強的低空探測能力和機動能力,是預警探測的重要組成部分,是實現一體化、信息化作戰以及攻防兼備的重要武器裝備,其作用已在近幾次局部戰爭中得到充分體現,如海灣戰爭、伊拉克戰爭。為充分發揮其對空中和地(海) 面目標的搜索、定位、跟蹤、識別和指揮引導等能力,預警機預警能力評估顯得尤為重要。隨著預警機遂行多樣化軍事任務的需要,預警機已由傳統的空中預警向執行特殊任務轉變,特別是遠程支援空空攔截作戰方面已成為未來研究的熱點,目前相關研究多集中在預警機本身預警能力指標量化評估,未與特殊任務相結合,給工程應用和實踐帶來了一定困難。
論文結合空空攔截作戰任務,進行預警機預警能力評估。該方法首先針對空空攔截所需的早期預警、初制導預警、中制導預警和末制導預警共4個階段,根據目標特性、攔截武器平臺,確定各個階段的額定指標參數要求,額定指標參數包括預警時間和位置;然后計算用于探測4個階段的4型裝備的實際指標參數,實際指標參數包括預警時間和位置;最后根據額定指標參數和實際指標參數,建立證據轉化模型,給出預警能力的總體評價。論文主要貢獻體現在評估階段劃分及各階段評估計算方法,面對評估參數的不確定性,提出了加權證據合成,最后進行了仿真驗證,能夠為理論研究和工程實踐提供參考[1-3]。
1 預警能力需求指標
(1) 早期預警階段
(2) 初制導預警階段
(3) 中制導預警階段
(4) 末制導預警階段
預警時間指標Te4、位置精度指標Se4,根據攔截武器的每次行動任務直接獲取。
2 預警能力實際指標
預警能力實際指標由預警機載雷達的探測能力決定。
(1) 早期預警階段
(2) 初制導預警階段
(3) 中制導預警階段
(4) 末制導預警階段
預警時間指標Tu4、位置精度指標Su4,由末制導預警階段機載雷達探測性能參數表確定。
3 預警能力綜合評估模型
(1) 建立預警能力評估辨識框架
預警能力評估辨識框架Θ={滿足,不滿足,不確定},提供時間證據和位置證據分別為:
m1i{滿足}=ti1;m1i{不滿足}=ti2;m1i{不確定}=1-ti1-ti2。
m2i{滿足}=si1;m2i{不滿足}=si2;m2i{不確定}=1-si1-si2。
其中,i=1,2,3,4。
(2) 證據賦值
采用參數歸一化,進行不同預警階段時間證據、位置證據的賦值計算。
預警證據賦值:
(1)
位置證據賦值:
(2)
(3) 建立預警能力評估可靠性矩陣
預警能力評估過程中有n個證據源同時提供證據參與證據合成,證據辨識框架Θ有3個命題,則所有證據形成3階證據矩陣,證據矩陣的行可靠性系數為ri,列可靠性系數為lij,則對應證據矩陣的可靠性矩陣為[4-8]:
(3)
可靠性矩陣反映了證據源提供的證據在合成過程中的權重系數以及它們對合成結果的影響程度,將可靠性矩陣引入標準證據理論合成公式中,其方法如下:
依證據源提供的證據給證據辨識框架內各命題分配基本概率賦值,同時建立各命題的可靠度Wij=ri×lij。

mi*(Ak)=βmi(Ak),k=1,2
(4)
(5)
(4) 利用證據組合公式分別對預警時間和預警位置進行證據合成:
m(Φ)=0
(6)
(7)
(8)
(9)
式中:i=1,2,3;j=1,2,3;A1、A2、A3分別為滿足、不滿足、不確定;B1、B2、B3分別為滿足、不滿足、不確定。
4 仿真實驗與結果分析
為了檢驗特殊任務的預警機預警能力評估的效果,對系統進行仿真。評估系統中共收集到4個階段8條證據,分別為時間證據和位置證據,各證據數據相互獨立。目標評估框架為Θ(o1,o2),其中o1表示滿足,o2表示不滿足。各證據基本概率賦值如表1所示。
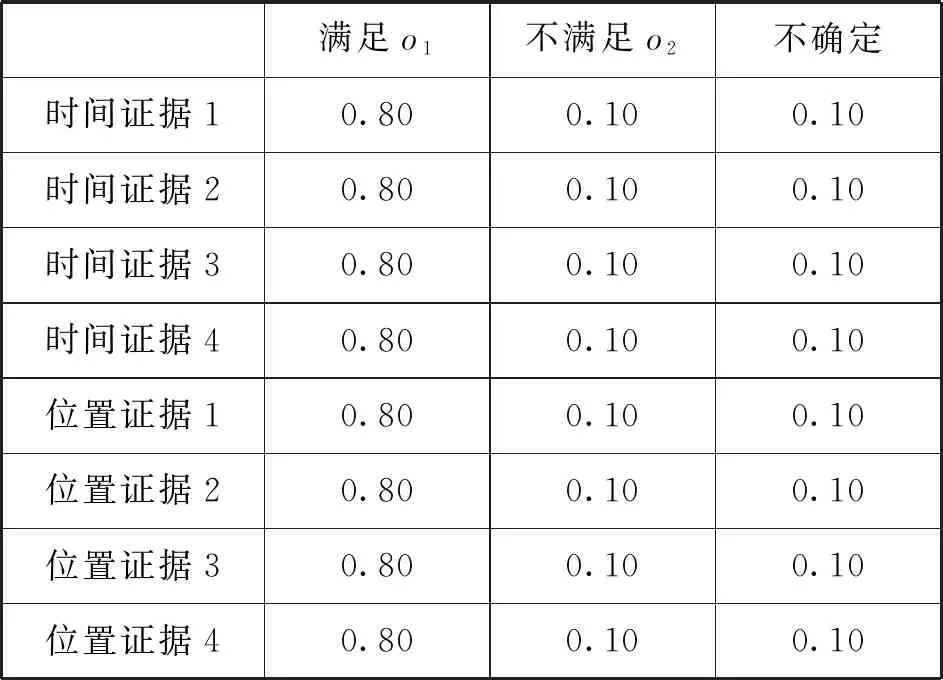
表1 基本概率賦值
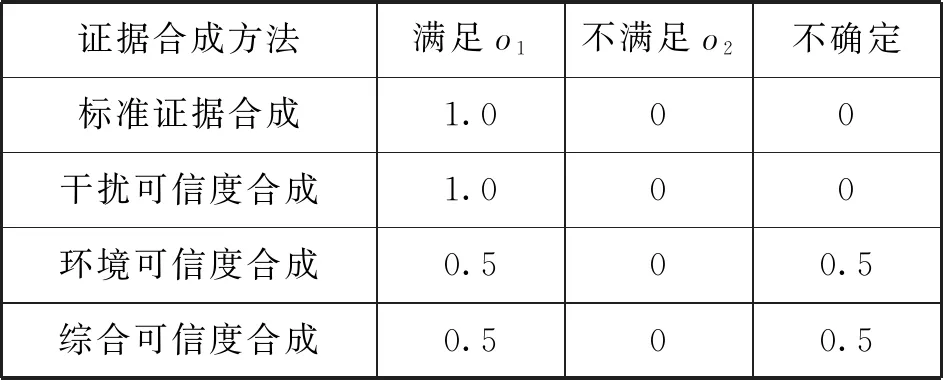
表2 4種情況的評估結果
從4種情況的證據合成結果可以看出:不考慮各機載雷達證據可信度的情況下,滿足可信度趨于1,能夠直接得出預警能力滿足的結果;單純考慮干擾可信度情況下,結論依然明朗,主要是干擾向量對時間位置影響均等且權值很小;單純考慮識別率可信度融合和綜合可信度融合情況下目標的模糊性增強,與不考慮可信度的融合相比很難判定出正確的結果。這也說明了實際系統中考慮證據的可信度與否對融合結果有很大影響,這也與實際運用是一致的。因此在預警能力評估過程中需要綜合考慮各種因素的影響。
5 結束語
對于工作在實際環境下的預警機預警能力評估,其評估有效性除了由機載雷達的性能決定,也由環境所決定。文中不僅給出了評估的階段劃分參數獲取,同時采用了將可信度矩陣與證據推理相結合的方法,確保了系統評估的準確性和有效性。證據推理與證據評估結合是評估效果的有效方式,這也是評估技術的發展趨勢。由于可信度矩陣的獲取還存在一定的難度,這在一定程度上限制了它的全面應用,因此也成為當前研究的一個焦點。
猜你喜歡
發明與創新(2022年30期)2022-10-03 08:40:56
中學生數理化·七年級數學人教版(2022年6期)2022-06-05 06:50:58
意林(兒童繪本)(2020年2期)2021-01-07 02:12:04
動漫星空(興趣百科)(2020年12期)2020-12-12 05:31:40
作文成功之路·小學版(2020年5期)2020-06-11 12:48:46
意林(兒童繪本)(2019年9期)2019-10-15 08:51:46
中國生殖健康(2019年10期)2019-01-07 01:21:14
人大建設(2018年6期)2018-08-16 07:23:10
新高考(英語進階)(2018年1期)2018-04-18 14:00:11
文理導航·科普童話(2017年5期)2018-02-10 19:42:14