基于相位法的礦用激光測距儀設計
2020-10-20 05:34:01趙慶川
計算技術與自動化 2020年3期
趙慶川
摘? ?要:針對傳統煤礦頂底板移近量測量無法實時監測、檢測精度低、實用性差的問題,設計了一種采用集成相位法測距原理的激光測距模塊作為距離測量核心模塊的激光測距儀,顯著提高了頂底板移近量測量的檢測精度和實時性。從器件選型、邏輯控制機制兩方面詳細介紹了降壓轉換電路、接口EMC電路、五位數碼管顯示電路、遙控電路、激光測距模塊接口電路、通訊電路六部分電路原理圖設計方案,以及測距儀的軟件執行邏輯流程。測距儀進行了實驗室和現場基本性能和功能試驗,實驗結果表明,測距儀具有檢測精度高、煤礦頂底板測距實用性強的特點,滿足設計需求。
關鍵詞:相位法;激光測距;總線通訊;接口EMC;遙控電路
中圖分類號:TD326? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文獻標識碼:A
Design of Mining Laser Rangefinder Based on Phase Method
ZHAO Qing-chuan1,2?
(1. Chongqing Research Institute,China Coal Technology Engineering Group,Chongqing 400039,China;
2. State Key Laboratory of Gas Disaster Monitoring and Emergency Technology,Chongqing 400039,China)
Abstract:Aiming at the problems of the traditional mine measuring instruments and methods about roof to floor convergence that can not be monitored in real time,the detection accuracy is low and the practicability is poor,an innovative laser rangefinder is designed,which uses the integrated phase ranging principle as the core module of distance measurement,and the detection accuracy and real-time performance of roof to floor convergence are greatly improved. Six parts of the circuit schematic scheme are presented in details from two aspects of device selection and logic control mechanism,including the step-down circuit,interface EMC circuit,five digital tube display circuit,remote control circuit,interface circuit of laser ranging module,communication circuit,and the software execution logic flow of the rangefinder are presented in details too. The basic performance and function of the rangefinder are tested in laboratory and field,the experimental results show that the rangefinder has the characteristics of high detection accuracy and strong practicability of coal mine roof to floor convergence,which meets the design requirements.
Key words:phase method;laser range finder;bus communication;interface EMC;remote control circuit
隨著礦井開采深度的增加,特別進入超千米開采階段[1-2],巷道圍巖呈現出明顯的軟巖變形特征,已成為實際意義上的深井高應力軟巖。隨著礦井采深的增加頂板壓力逐漸增大[3],圍巖變形現象更加突出。因自重效應的影響,圍巖以垂直變形為主[4]。目前大多礦井采用錨固支護,兩幫及頂板進行了錨固,因此垂直變形又以底鼓為主[5-7]。為了掌握巷道頂底板變形的情況,大多礦井采用人工測量的方式,費工費時且測量準確性差[8]。近年來,機械式頂底板測距儀和超聲波測距傳感器逐漸被用于圍巖變形測量,但是機械式頂底板測距儀雖然超聲波測距不受電磁、煙霧和粉塵等因素的干擾,但測量的精度往往只能達到分米量級[9],不滿足礦井巷道頂底板移近量精確測量的需要。激光測距作為一種測量技術,與其它測量手段相比,因具有非接觸式、測量速度快、精度高、距離遠、抗干擾能力強等獨特優勢而被廣泛應用于多種領域[10-11],并且測量精度受煤礦環境影響小。鑒于此,設計了一種基于相位法的礦用激光測距儀[12],具有毫米級的檢測精度和較低的整機功耗,測距儀采用數碼管顯示,具有精度調校、超限報警等功能,通過RS485總線與監控分站通訊,實現頂底板移近量的實時監控。
1? ?測距儀工作原理及總體設計
1.1? ?相位法測量原理
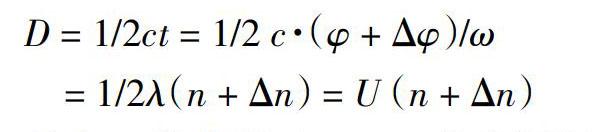
相位法激光測距是對激光束按照無線電波段的角頻率ω和特定波長λ進行幅度調制[13-15],通過測定調制后激光束在被測距離間往返一次所產生的相位延遲φ,換算此相位延遲所代表的距離D。其公式為
其中 U數值等于1/2λ,作為測距的1個單位長度。n表示光束往返距離D所需波長的整數值,Δn表示不足一個波長的分量。
根據相位法激光測距原理及公式算法,我們設計了由激光調制發射電路、光電檢測電路、頻率綜合電路以及數字測向電路構成的激光測距模塊,模塊與主板單片機采用UART串口通訊,將距離數據上傳給單片機。
1.2? ?傳感器總體設計
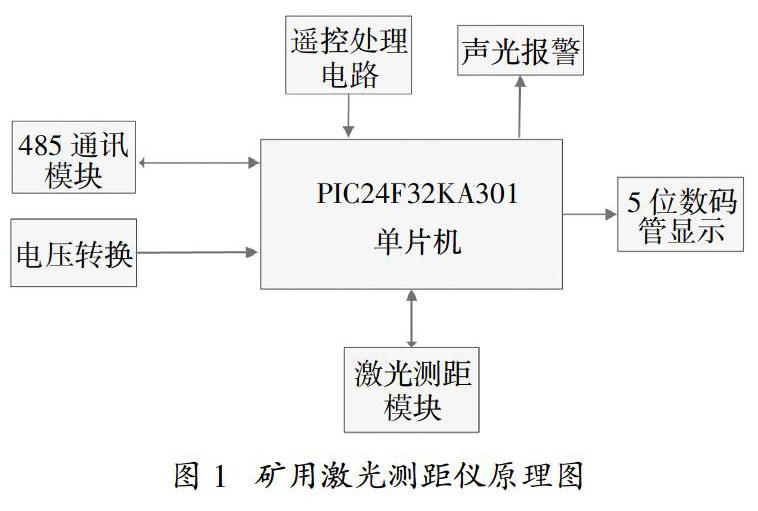
激光測距儀電路設計框圖如圖1所示,測距儀硬件電路主要由電壓轉換電路、激光測距模塊、遙控處理、聲光報警、RS485通訊、數碼管顯示六部分電路組成。
測距儀采用低功耗的PIC24F32KA301單片機,單片機具有2路UART串口,一路用于激光測距模塊通訊,一路用于RS485通訊芯片交互數據。單片機內置12位AD、片內EEPROM等硬件資源,用于模擬信號采集和存儲報警點、通訊地址等參數,具有二十余個GPIO端口,可用于顯示驅動和邏輯控制。
2? ?硬件電路設計
2.1? ?降壓電路設計
為測距儀供電的關聯本安電源輸出電壓為24 V,而測距儀的電路主板元器件主要供電電壓為5 V以內,因此測距儀設計降壓轉換電路將9~24 V直流電壓轉換為適合單片機及元件工作的5 V電壓,降壓電路如圖2所示。
電壓轉換電壓核心芯片采用TI公司的DC-DC開關電源芯片LM25011,該芯片輸入電壓可達42 V,最大輸出電流2 A,完全滿足激光模塊激光器工作時瞬態電流要求。芯片在輸出電流200 mA時轉換效率可達90%以上,且芯片具有內部集成延時緩啟動功能,從而有效平滑電源電壓波動。芯片第8引腳FB處的反饋電壓為2.5 V,精度為±2%,通過R2、R3電阻構成分壓反饋電路,因此輸出電壓為4 V。LM25011芯片靜態電流11.5 uA,滿足測距儀電壓高效率轉換及低功耗設計的需求。
單片機工作電壓為2.0~3.6 V,兼顧效率和功耗,單片機采用3.3 V供電,采用型號為MCP1702的LDO芯片將4 V電壓轉換為3.3 V。
2.2? ?接口EMC電路
為提高測距儀的可靠性,必須對供電輸入端口及RS485輸出接口設計保護電路,提高電路防護靜電、浪涌電流、群脈沖干擾的能力。接口保護電路如圖3所示,在供電輸入端口設計了型號為5KP33CA的TVS保護器件,標稱保護電壓為33 V,可承受7000 V瞬變電壓。在RS485通信口設計了型號為SMCJ12CA 的TVS1保護器件,標稱保護電壓為12 V,可承受3000 V瞬變電壓。在供電輸入正極串聯了型號為SS14的二極管,避免了電源正負極錯接對電路板器件的損壞。
2.3? ?數碼管顯示電路
設計的激光測距儀檢測量程為0~10 m,最小分辨率為1 mm。數碼管顯示電路具有5位段碼式數碼管,第一位為狀態顯示位,后四位為顯示數值。1 mm顯示樣式為0.001,單位為米。顯示電路采用動態掃描設計,每位數碼管8段全亮時工作電流為2 mA左右。電路共需要“DB0、DB1、DB2、DB3、DB4、DB5、DB6、DB7”8根控制顯示段位LED燈的引線,以及“LED4、LED3、LED2、LED1、LED0”5根數碼管陽極供電控制引腳線,由單片機GPIO端口串聯阻值為1K電阻直接驅動。
采用圖4所示的動態顯示電路,任意時刻只有一位數碼管在上電點亮顯示,同時DB0~ DB7輸出對應字符的邏輯電平。每位數碼管的刷新頻率為30 Hz,而人眼能夠識別的閃爍為25 Hz以下,因此動態顯示電路在實現高亮度顯示監測數值功能同時顯著降低工作電流。
2.4? ?遙控電路設計
遙控電路采用型號為IRM-3638的紅外線接收頭接受操作信息指令,包括精度、報警點、通訊地址等參數都需要設置。具體電路如如圖5所示。
電路主要包括紅外線接收頭IR1和三極管Q5及R9、R10、C5阻容器件組成。紅外線接收頭IR1接收到經調制的一定頻率的紅外光后,會在1管腳輸出高低電平信號。當IR1輸出高電平時,Q5導通,Infra-red信息為“0”;當IR1輸出低電平時,Q5為高阻抗狀態,Infra-red信息為“1”。單片機采集到Infra-red信息及持續時間信息后,經過信息編碼邏輯算法處理即可識別出遙控信息的指令,從而實現傳感器設置信息的輸入識別。
2.5? ?激光測距模塊接口電路設計
激光測距模塊工作電壓為3.3 V,設計采用LDO芯片將4 V供電電壓轉換為3.3 V。LDO芯片型號為TPS77633,輸出最大電流500 mA,滿足激光測距模塊瞬態工作電流設計要求。
激光測距模塊接口電路如圖6所示。為了降低激光測距儀的整機功耗,測距模塊采用由單片機控制的間歇式供電方式。當MKGD為高電平時,TPS77633芯片輸出使能引腳EN為低電平,芯片輸出精度為2%的3.3 V,測距模塊上電工作;當MKGD為高電平時,TPS77633芯片輸出使能引腳EN為高電平,芯片無輸出。
單片機與測距模塊采用UART串口交互命令和數據,波特率為19.2 kbps,單片機每隔10 s讀取一次測距模塊的距離測量數據。