無人機大比例尺免像控關鍵技術探討
2020-09-18 08:22:18王永菊龔克東正蘭
全球定位系統 2020年4期
王永菊,龔克,東正蘭
(1.青海省基礎測繪院,青海 西寧 810001;2.青海省測繪質量監督檢驗中心,青海 西寧 810001)
0 引 言
航天攝影測量技術對于獲取大范圍的地形圖具有一定的優勢,對于小區域地形圖而言成本高[1-2].低空無人機因體積小而具有機動靈活、生成成本低以及時效性較強等特點,廣泛應用在地理國情監測、災害應急處理、城市自然環境監測等領域[2].
傳統攝影測量生產周期長、作業效率低,對于小區域的大比例尺、高精度地形圖獲取通常采用無人機攝影測量方法.由于無人機飛行過程中姿態不穩定、容易受飛行環境的影響,需要布設大量的外業像控點為正射影像的制作提供空間坐標基礎,大量外業控制點的測量成為影響無人機航攝技術獲取大比例地形圖效率的主要因素.陳登等[3]針對高差、地勢起伏較大的區域難以獲得理想的空三結果,通過在航攝前期布設大量外業像控點,并將采集的像控點參與空三加密過程,提高空三的精度與速度,但飛行前布控需要計算地面標識的尺寸大小、且難以保證所采集的像控點都能用于空三處理,一定程度上增加外業工作量,而且內業刺點引入刺點誤差對空三精度的影響.為了避免外業采集的像控點不能有效地利用,姜丙波等[4]采用先航空攝影獲取影像數據,利用生成的正射影像人工刺點,均勻選取待測的外業像控點,該方式需要具有較好知識的作業人員利用立體模型結合內外業知識選擇合適的控制點,保證選取點清晰、明顯,避免邊緣處及重疊現象.目前在像控點密度方面,缺少定量指標參數,往往需要內、外業作業人員長期合作形成默契配合,保證空三精度滿足應用需求.為了降低像控點刺點引入的刺點誤差,賈彥昌等[5]、朱曉康[6]采用天狼無人機免像控航攝系統進行大比例尺地形圖測繪生產,縮短整個航測作業的生產周期,減少外業工作量,避免受外業天氣的影響,減少空三生產過程內業刺點難以刺準的影響,提高生產作業效率,但該航攝系統價格較高,在實際生產過程中難以推廣.
鑒于此,本文提出無人機攝影測量的大比例尺免像控關鍵技術探討.首先,通過影像畸變改正模型對影像進行畸變修正,對修正好的影像進行匹配提起同名點對,利用多種約束策略剔除誤匹配點;然后,利用GodWork軟件的AAT模塊進行引入曝光延遲的光束法區域平差方法,對每個分區域進行空三處理,獲取影像精確的外方位元素信息,為保證測區整體精度一致性及不同測區影像接邊滿足精度要求,對多個分區進行整體一致性空三處理;最后,利用精確的外方位素構建立體模型,統計引入曝光延遲的光束法區域網平差方法的精度,為大比例尺測圖提供一種思路.
1 無人機大比例尺免像控關鍵技術
無人機航攝平臺優勢明顯,但平臺上搭載的內方位元素未知、存在較大的光學畸變差的小像幅數碼相機獲取影像數據,往往需要大量的外業像控點參與區域網平差來滿足空三精度要求,增加外業的作業難度以及工作量.
1.1 鏡頭畸變改正
采用搭載數碼相機的無人機設備,在獲取影像數據時,數碼相機鏡頭存在畸變現象,獲取影像數據的像空間坐標與真實的坐標位置存在一定的差異.由于數碼相機焦距固定,因此獲取的影像具有相同的影像畸變誤差.在影像數據匹配、空三處理前需要對數碼相機獲取的影像進行幾何畸變糾正,即通過已知畸變模型參數對影像上的每個像元進行畸變模型改正,確保改正后影像上灰度值不變[7].數碼相機的鏡頭畸變校正模型可以表示為
(1)
(2)

數碼相機自標定的方法通過一個擬合過程來消除一些未知的系統誤差,建立影像間的對應關系,提高相機標定后參數精度,但在不同架次之間的標定參數可能會存在較大的差別,從另一方面也說明通過標定相機參數可以消除一些系統誤差.
1.2 GPS輔助光束法平差模型
GPS輔助光束法平差能有效地避免空三過程需要大量外業控制點問題,采用傳統的載人飛機GPS輔助光束法區域網平差依賴價格昂貴的GPS/POS系統,該裝置一般會配置專業的時間同步曝光設備,獲取相機曝光時刻影像中心的姿態、位置信息用于后期空三初始參數[8-10].平差模型如下:
(3)
(4)

獲取影像數據過程中若飛行平臺能夠保持相對穩定的飛行速度,以單條航帶為平差基本單元采用傳統的GPS輔助光束法區域網平差方法,可以一定程度地減弱GPS相位中心與相機獲取影像曝光時刻存在的曝光延遲誤差帶來的幾何偏移;通過在平差模型中引入一個固定的位置常量參數來補償由于曝光延遲帶來的偏移誤差,減弱曝光延遲誤差帶來幾何定位精度較差問題,減弱無人機影像空三處理過程中對外業像控點的依賴程度,提高測圖作業效率;但考慮到無人機平臺的不穩定性、載重能力的限制,難以在搭載相機的同時搭載笨重的POS系統以及相機曝光同步設備,導致相機曝光獲取數據時刻導航型GPS記錄的位置與姿態信息與實際相機曝光時刻的位置與姿態信息存在嚴重的不一致問題,而無人機飛行過程容易受到外界環境的影響難以保持穩定的狀態,在相機曝光各個瞬間飛行的瞬時速度與瞬時姿態各不相同,因此,依然采用傳統的GPS輔助光束法區域網平差方法存在一定的不合理性.
1.3 顧及曝光延遲的GPS輔助光束法平差模型
傳統的GPS輔助光束法區域平差方法缺少對曝光時刻平臺飛行速度不穩定性帶來的曝光延遲不一致問題的考慮,導致空三平差處理后影像定位精度與理論值相差較大,難以滿足高精度大比例尺測圖需求,很大程度上限制了利用低空無人機進行高精度立體測量的應用領域.
結合無人機攝影測量的作業特點,考慮相機曝光延遲導致曝光瞬間的位置偏移問題,針對各曝光點的曝光延遲模型通過曲線約束的曝光延遲模型(模型原理見圖1)進行逐點曝光補償[11].相比較傳統方法,顧及曝光延遲模型的無人機GPS輔助光束法區域網平差方法,更加側重對各曝光點的曝光延遲誤差進行逐點曝光補償,適合速度不穩定的無人機獲取的影像數據進行GPS輔助光束法區域網平差處理.在模型解算過程中,將曝光延遲作為未知參數與其他系統誤差一并帶入誤差方程組進行統一求解,消除由曝光不同步所帶來的誤差影響,從而提高GPS輔助光束法區域網平差方法的解算精度.
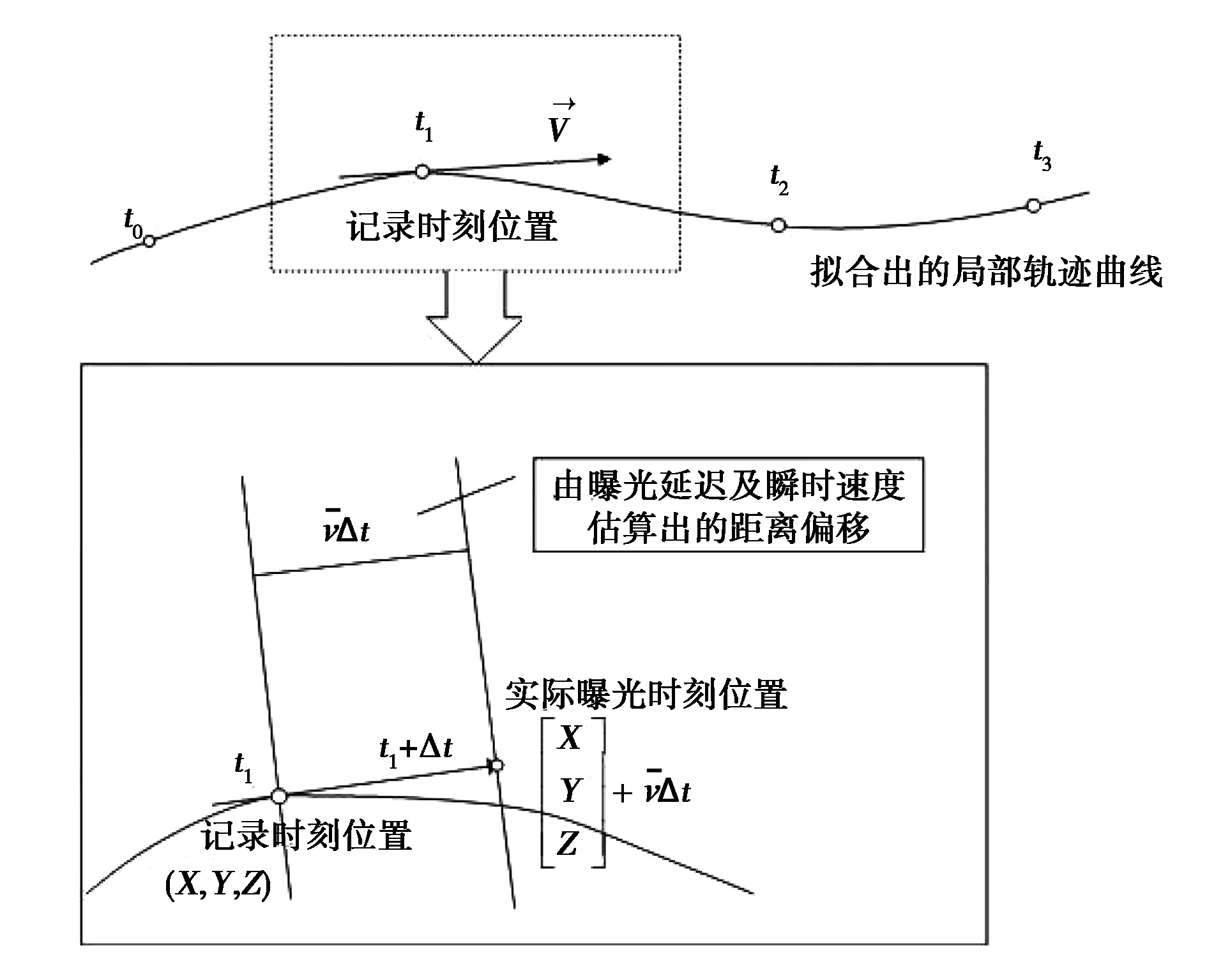
圖1 曲線約束的曝光延遲模型
曲線約束曝光延遲模型的GPS光束法區域網平差的模型可以表示為
(5)

2 實例分析
本文采取以成都縱橫大鵬無人機公司CW-10垂直無人機為飛行平臺,搭載主距為35.00 mm、像幅為7360×4912像素大小的SONYILCE-7R相機,采集某地區長約6.0 km、寬約5.0 km的丘陵山地類型數據.采用后差分全球衛星導航系統(GNSS)處理技術處理POS數據,以GodWork軟件的AAT模塊結合計算機視覺最新理論和算法解決攝影測量的像點量測與平差等問題,測試1∶500無像控大比例測圖的可行性.
2.1 航測流程
利用無人機攝影測量系統進行大比例尺免像控技術生產測繪產品主要分為三個階段:影像數據獲取階段、利用影像數據以及輔助數據進行曲線約束曝光延遲模型的光束法區域網平差優化影像的定向參數階段以及立體模型精度驗證階段,基本流程如圖2所示.
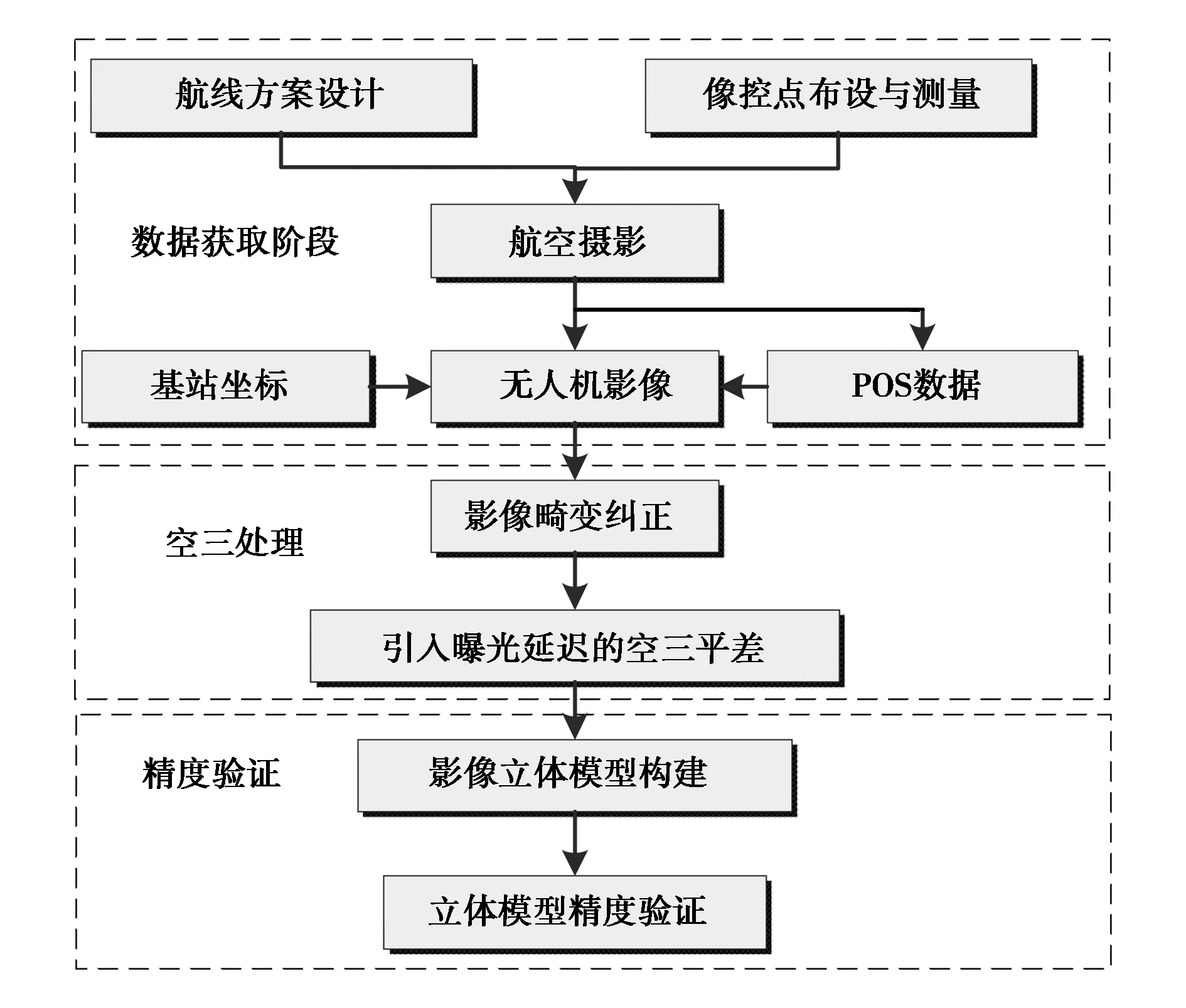
圖2 技術流程
2.2 飛行航線設計
針對地形高差較大的測區范圍根據測區概況,采用CWCommander軟件進行自動分區設計,確保區域間的接邊重疊度,通過精確的地形跟飛模式,以獲取有效的影像分辨率.測區1設定地面采樣距離為5 cm,航高為319 m,航向重疊80%,旁向重疊65%,預計飛行5個架次.測區1的航線設計如圖3(a)所示.將9個測區采用變航高線設計的方式,對每個分塊測區進行飛行線設計,共飛行52次,獲取影像76 890張,將CWCommander軟件生成的航線導入谷歌地圖中,展示如圖3(b).

(a)測區1航線設計圖 (b)測區航線示意圖圖3 變航高航線飛行方案
CW-10無人機系統上集成高精度定位、定姿設備,在獲取影像時能夠獲取對應時刻的位置和姿態信息即每張影像的外方位元素,通過后期引入曲線約束曝光延遲模型的光束法區域網平差方法精確獲取影像的外方位信息,因此可在架設基準站的情況下獲取影像數據而無需單獨再布設外業像控點.
2.3 空三計算及精度分析
通過影像初始外方位元素參數估計影像的仿射變換矩陣,并對影像進行仿射變換糾正,然后進行基于SIFT算法的影像匹配提取初始同名點,最后通過歸一化相關測度約束、極限約束以及主方向差值一致性約束等多種約束策略[12]剔除誤匹配點獲取最終的精確同名點坐標.針對數碼相機曝光時刻無人機飛行速度不一致導致曝光延遲存在一定差異,采用傳統的航空攝影的曝光延遲補償模型存在一定的局限性,本文采用引入曝光延遲誤差模型的GPS輔助光束法區域網平差方法.在每一個小測區內部將每張影像的曝光延遲作為未知參數引入到GPS輔助的光束法區域網平差模型中同其他系統待求誤差列誤差方程組,通過最小二乘平差算法解算每張影像的曝光延遲時間以及對應的內、外方位元素改正量,提高影像的定位精度,避免因外業像控點測量、像點刺點等工作帶來的偶然誤差;每個子區域空三完成后,為保證接邊區域無縫拼接以及整個測區定位精度的整體一致性,對多個區域進行整體空三,為后續DSM以及DOM生產提供精度保證.為了驗證引入曝光延遲的GPS輔助光束法區域網平差的精度,在工程范圍內均勻選取了27個明顯的特征點作為地面檢查點,采用實時動態(RTK)作業模式獲取外業控制點的坐標,將空三加密后的坐標與外業采集坐標進行比較,統計X、Y、H三個方向的誤差.分區域空三、整體空三如圖4(a)、(b)所示,整體空三后的統計精度如表1所示.
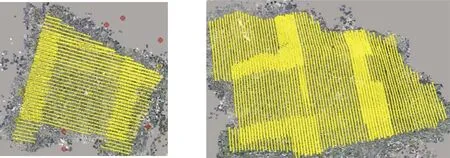
(a)其中一塊空三完成狀態圖 (b) 合并空三示意圖圖4 空三示意圖
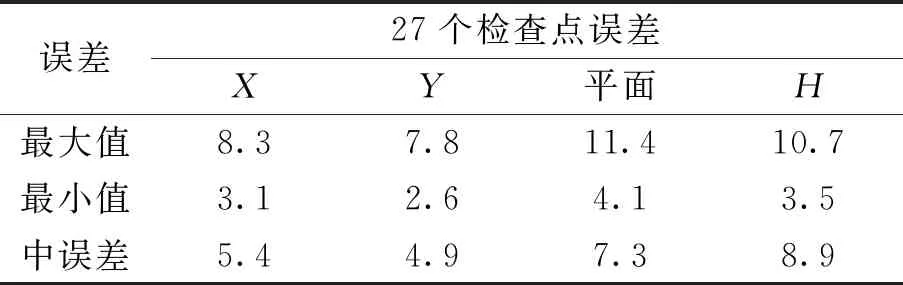
表1 空三加密精度統計表 cm
根據表1空三精度報告結果可知:在具有高精度后差分GPS的條件下,不使用地面控制點,使用godwork-AAT模塊進行引入曝光延遲的GPS輔助平差,空三精度能達到低空數字航空攝影測量內業規范規定的1∶500的規范要求,檢查點平面精度約為7.3 cm,高程精度約為8.9 cm,小于規范要求的平面精度17.5 cm和高程精度的28 cm,滿足1∶500大比例尺測繪需求.
2.4 立體模型精度驗證
為了進一步檢驗空三精度,利用生成的影像外方位元素信息構建測區的立體模型,在立體模型上量測典型目標的特征值與外業實測結果進行比較分析,統計立體模型精度.通過外業測量50個檢測點以及30個地物長度與在立體模型上量測的空間坐標、長度進行比較,統計立體模型的絕對定位精度(表2)與相對精度(表3),表中坐標位置僅后三位不同,為顯示方便,僅顯示后三位.
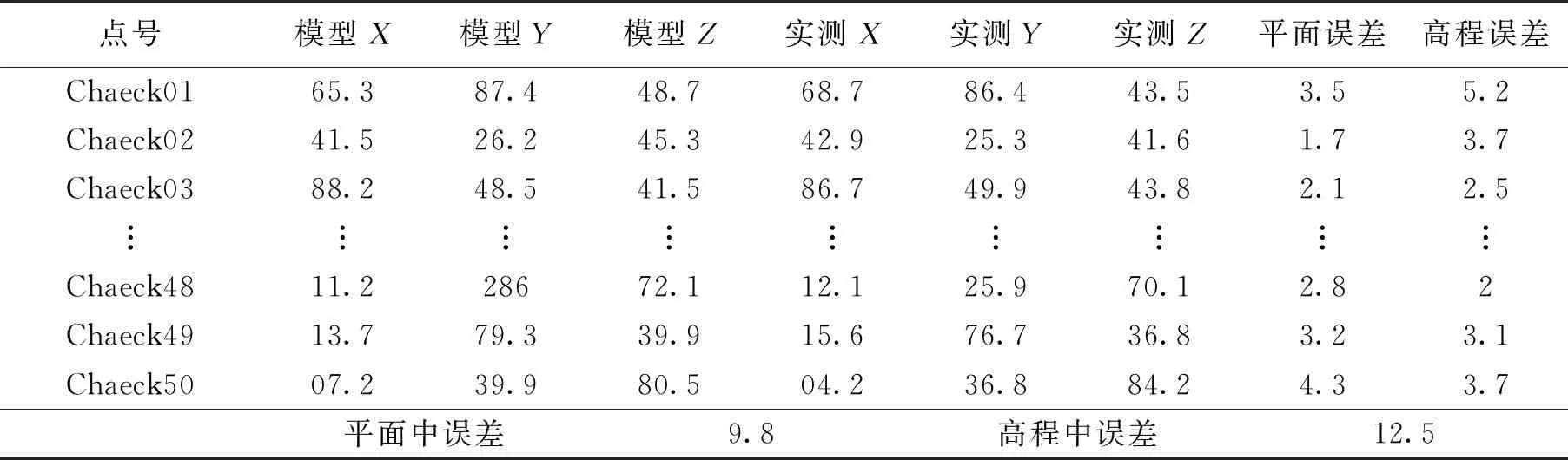
表2 絕對定位精度 cm
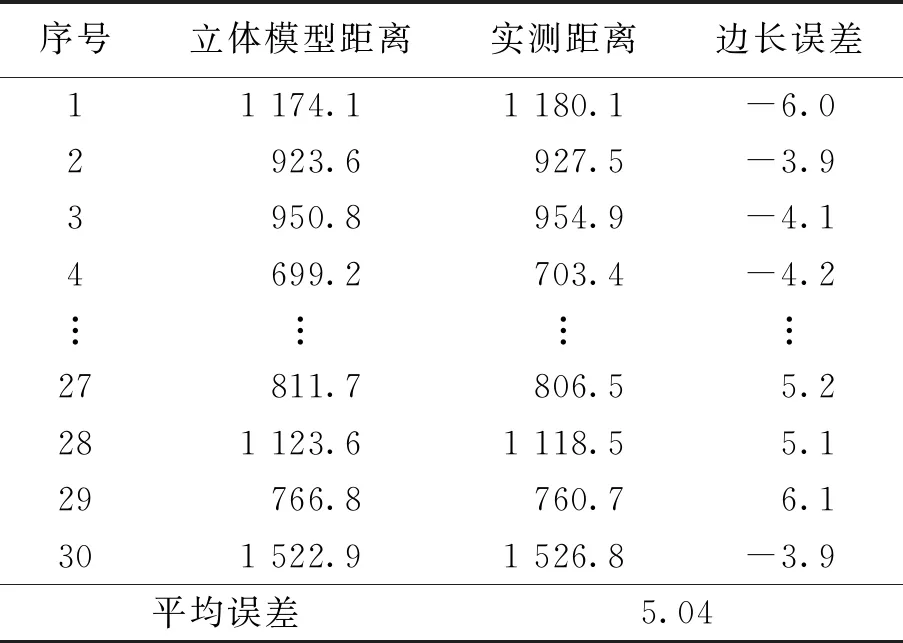
表3 相對精度(邊長誤差統計) cm
由表2可知:采用空三后的影像定向參數構建的立體模型絕對定位精度平面誤差為9.8 cm,高程誤差為12.5 cm,滿足1∶500的大比例尺測圖要求;由表3可知:由立體模型上量測物體邊長統計立體模型的相對精度,邊長中誤差為5.04 cm,且模型的相對誤差集中分布整體達到厘米級,沒有出現過大或過小的誤差,整體一致性較好,滿足1∶500的大比例尺測圖要求.
3 結束語
針對地形高差較大的測區,根據測區概況選用縱橫大鵬CW-10垂直無人機為飛行平臺分區域采用精確的地形跟飛變航高模式獲取有效的影像分辨率,利用GodWork軟件的AAT模塊引入曝光延遲模型的GPS輔助光束法區域網平差進行顧及無人機飛行速度不穩定引入曝光延遲誤差不一致問題;通過分區域平差處理獲取影像高精度的空三結果,避免區域高程較大導致空三難以獲取有效的精度;多區域整體一致性平差保證影像內部精度一致性,避免影像接邊處出現較大的接邊誤差問題.最后通過實驗,驗證本文提出的無人機大比例尺免像控技術的可行性,整體到達1∶500大比例尺測圖需求,為后續處理大區域高差較大的大比例尺測圖提供一種思路.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
核科學與工程(2015年4期)2015-09-26 11:59:03
電測與儀表(2015年5期)2015-04-09 11:30:52
