采用相對熵評價雷達相對系統(tǒng)誤差估值
2020-09-11 12:35:50高效,敬東,陳鋼
雷達科學(xué)與技術(shù) 2020年4期
關(guān)鍵詞:有效性
高 效, 敬 東, 陳 鋼
(中國人民解放軍93209部隊, 北京 100085)
0 引言
雷達相對系統(tǒng)誤差是指雷達在對目標(biāo)進行測量時存在的相對于指定參照系的固定誤差,包括雷達動態(tài)測量中的測向誤差Δθ、測距誤差Δρ、仰角誤差Δα、雷達站址標(biāo)定誤差(Δx,Δy)和雷達組網(wǎng)應(yīng)用中存在的坐標(biāo)轉(zhuǎn)換誤差等[1-4]。在雷達組網(wǎng)觀測中,動態(tài)目標(biāo)的絕對位置多數(shù)情況下是不可知的,我們比較容易得到的是在同一時間段內(nèi)不同雷達對同一飛行目標(biāo)的離散觀測值。而相對于網(wǎng)內(nèi)其他雷達來說,總會有一部雷達的觀測是精確的,此時可以以該雷達(命名為主站)的測量值作為對目標(biāo)位置的真實描述,其他雷達(命名為次站)以此為參照,從而求得次站雷達相對于主站雷達的相對系統(tǒng)誤差。
估計、消除單雷達測量中存在的系統(tǒng)誤差有兩種途徑:設(shè)備校準(zhǔn)和數(shù)據(jù)校準(zhǔn)[1-3]。對于多雷達組網(wǎng)后的系統(tǒng)誤差校準(zhǔn),情況就更為復(fù)雜。如何評價一組系統(tǒng)誤差估值或某種數(shù)據(jù)校準(zhǔn)方法的有效性,成為一個亟待解決的問題。
傳統(tǒng)的系統(tǒng)誤差估值有效性評價多采用“取點評價法”,就是將同一時刻,雷達測量位置點與目標(biāo)在參照系中的位置點(這兩個點又稱為時間配準(zhǔn)點)之間的直線距離作為基本評價依據(jù)[5]。為了提高評價的可信度,往往需要取多個時間配準(zhǔn)點,將多個時間配準(zhǔn)點修正前后距離的平均值[6-7]之比作為最終的系統(tǒng)誤差估值有效性評價指標(biāo)。這種方法原理上比較科學(xué),但在工程實現(xiàn)上,由于雷達異步工作,“多個時間配準(zhǔn)點”在原始測量中幾乎不存在,雖然采用卡爾曼濾波等方法可以外推得到配準(zhǔn)時刻的目標(biāo)位置點,但外推過程又不可避免地引入了新的計算誤差,因此取點評價法的可操作性和準(zhǔn)確性不高。
我們針對傳統(tǒng)方法從局部(單點)入手帶來的問題與不足,引入信息論中相對熵的概念,通過選取典型航路(目標(biāo)保持一定高度沿直線飛行)上的一組主、從雷達測量數(shù)據(jù),整體比較次站觀測航跡線系統(tǒng)誤差修正前后與主站觀測航跡線的相似性來評價系統(tǒng)誤差估值的有效性以及修正效果。這樣在提高準(zhǔn)確性和可操作性的同時,簡化了評價方法的復(fù)雜程度,方便了工程上的實現(xiàn)。
1 基于相對熵的系統(tǒng)誤差估值有效性評價方法
在信息論中,相對熵用來衡量兩個取值為正的函數(shù)的相似性,比如:X為一非空集合,f(x)和g(x)是X上的兩個離散隨機概率分布函數(shù),則f(x)和g(x)之間的相對熵定義為
(1)
對于上式,可以推導(dǎo)[8]:兩個完全相同的函數(shù),它們的相對熵等于零;相對熵越大,兩個函數(shù)的差異越大,反之,相對熵越小,兩個函數(shù)的差異越小;另外相對熵是不對稱的,即
KL(f(x)||g(x))≠KL(g(x)||f(x))
為了便于使用,香農(nóng)等人提出了新的相對熵計算方法,即:

KL(g(x)||f(x))]
(2)
我們采用式(2)作為雷達相對系統(tǒng)誤差估值有效性評價的基本依據(jù),具體方法步驟如下:
步驟1:選取主、次站雷達對同一空中目標(biāo)的一段同時段觀測數(shù)據(jù)。“同時段”是指兩部雷達觀測數(shù)據(jù)首點和末點時間差均不大于1個雷達探測周期(一般為10 s或20 s)。在目標(biāo)作處于直線運動狀態(tài)時,每部雷達觀測數(shù)據(jù)點數(shù)量一般不少于10點,否則,每部雷達觀測數(shù)據(jù)點4~6點即可。這樣做的目的是選取較短時間內(nèi)的單雷達測量點集合,既能保證所選測量點即時反映目標(biāo)當(dāng)前整體航跡走勢,又要兼顧單雷達航跡線參數(shù)估計過程中消除隨機誤差影響的最少樣本數(shù)要求。
步驟2:對主站雷達原始觀測數(shù)據(jù)(極坐標(biāo)形式)進行坐標(biāo)變換,得到對應(yīng)的統(tǒng)一直角坐標(biāo)數(shù)據(jù){(Xtzi,Ytzi),i=1,2,…,n},n表示主站雷達觀測數(shù)據(jù)總點數(shù)。
步驟3:分別對次站雷達原始觀測數(shù)據(jù)、系統(tǒng)誤差修正數(shù)據(jù)進行坐標(biāo)變換,得到兩組統(tǒng)一直角坐標(biāo){(Xtcj,Ytcj),j=1,2,…,m}和{(Xtxj,Ytxj),j=1,2,…,m},m表示次站雷達觀測數(shù)據(jù)總點數(shù)。此處次站雷達系統(tǒng)誤差修正數(shù)據(jù)是指次站雷達原始觀測數(shù)據(jù)按照次站系統(tǒng)誤差估值(Δρ,Δθ,Δα,Δx,Δy)修正后的數(shù)據(jù)。
步驟4:在統(tǒng)一直角坐標(biāo)系中,對于測量點數(shù)據(jù){(xi,yi),i=1,2,…,p},將X坐標(biāo)作為自變量,Y坐標(biāo)作為因變量,分別對主、次站雷達觀測數(shù)據(jù)和次站雷達系統(tǒng)誤差修正數(shù)據(jù)進行曲線擬合,得到相應(yīng)的參數(shù)估計。曲線擬合方法可以采用最小二乘或切比雪夫曲線擬合法,為了防止過擬合,擬合多項式的項數(shù)一般取2或3即可[9]。本文采用加權(quán)直線航跡線參數(shù)迭代估計模型(詳見下一節(jié)),得到主站觀測航跡線參數(shù)(kz,dz)(分別表示直線的斜率和截距)、次站觀測航跡線參數(shù)(kc,dc)和次站修正航跡線參數(shù)(kx,dx)。
步驟5:計算次站觀測航跡線與主站觀測航跡線的相對熵JSc。相對熵越小,表明兩條航跡線越相似,過程如下:
① 計算f(xi)和g(xi)。
f(xi)=kzxi+dz,g(xi)=kcxi+dc,
i=1,2,…,n+m
(3)
式中,xi∈{(Xtzi|i=1,2,…,n)∪(Xtcj|j=1,2,…,m)},表示主站觀測點與次站觀測點橫坐標(biāo)的并集,n和m分別表示主、次站雷達的觀測點數(shù)。
② 計算KL(f(x)||g(x))和KL(g(x)||f(x))。
(4)
(5)
③ 計算JSc。
(6)
步驟6:計算次站修正航跡線與主站觀測航跡線的相對熵JSx。計算過程與步驟5類同。
步驟7:次站修正航跡線系統(tǒng)誤差估值有效性指標(biāo)V表示為
(7)
V∈[0,1]時,V越大,表示系統(tǒng)誤差估值越有效,航跡修正效果越好。V<0時,表示系統(tǒng)誤差估值不僅完全無效,反而加劇了主、次站雷達觀測航跡的分裂程度。
2 加權(quán)直線航跡線參數(shù)迭代估計模型
某時間段內(nèi)單雷達觀測到典型航路上的某一飛行目標(biāo)的總點數(shù)為n,所有測量點轉(zhuǎn)換到統(tǒng)一直角坐標(biāo)系后表示為{(xi,yi),i=1,2,…,n}。我們定義單一測量點(xi,yi)對目標(biāo)航跡線參數(shù)估計的貢獻率為該點的權(quán)值,記為vi。首先按照以下方法計算單一測量點的權(quán)值。
基于直線方程一般式:y-k0x-d0=0(k0為直線的斜率,d0為直線在Y軸上的截距),測量點(xi,yi)到直線的垂直距離li表示為
(8)
用所有單雷達觀測點{(xi,yi),i=1,2…,n}到該直線的垂直距離li的平方和最小作為條件構(gòu)造直線,計算在此條件下的這條直線的最佳參數(shù),即為不加權(quán)直線航跡線參數(shù)估計模型:
(9)
(10)
在測量點(xi,yi)對應(yīng)的權(quán)值vi已知基礎(chǔ)上,同樣基于直線方程一般式,我們用所有單雷達觀測點{(xi,yi),i=1,2,...,n}到某直線的垂直加權(quán)距離(vi×li)的平方和最小作為條件構(gòu)造直線,計算在此條件下的這條直線的最佳參數(shù)(k,d),即為單雷達加權(quán)直線航跡線參數(shù)估計模型[10]:
(11)
對于式(11)的求解,可以構(gòu)造方程:
(12)
求解(12)式可以得到一組合理的直線參數(shù)解(k,d)。然后計算所有測量點(xi,yi)到新直線的加權(quán)距離之和fm(k,d)(m表示迭代次數(shù)):
(13)
直到fm(k,d)不再減小為止,此時的(k,d)即為最佳直線參數(shù);否則按照當(dāng)前(k,d)重新計算所有測量點(xi,yi)的權(quán)值vi,回歸對式(10)的求解過程。
3 方法應(yīng)用與分析
使用本文方法,我們對某雷達網(wǎng)中一部次站雷達相對主站雷達的兩種相對系統(tǒng)誤差估值方案的有效性進行評價。
對圖1中的次雷達原始測量航跡線、次雷達修正航跡線1、次雷達修正航跡線2相對于主雷達測量航跡線的相對熵分別進行了計算,計算結(jié)果如下:
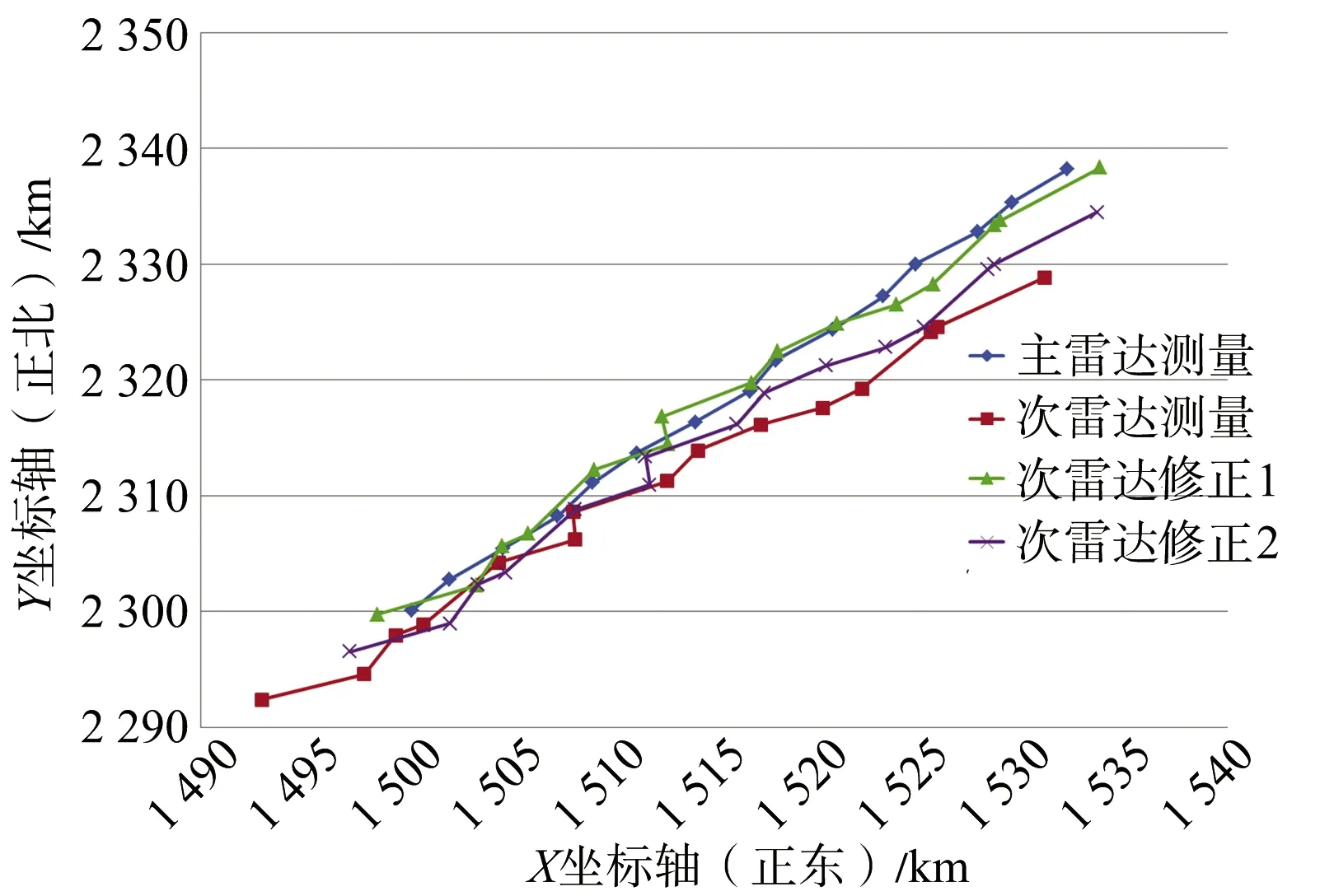
圖1 主、次雷達測量數(shù)據(jù)和兩組次雷達相對系統(tǒng)誤差修正數(shù)據(jù)顯示圖
主雷達與次雷達原始測量航跡線的相對熵JSc=0.188 534,主雷達原始測量與次雷達修正航跡線1的相對熵JS2x=0.002 087,主雷達原始測量與次雷達修正航跡線2的相對熵JS2x=0.084 058。則次站兩組相對系統(tǒng)誤差估值有效性指標(biāo)V1和V2計算結(jié)果分別為
(14)
由1>V1>V2>0可以得出以下結(jié)論:
①V1和V2對應(yīng)的系統(tǒng)誤差估值均能有效減小主、次站雷達觀測航跡的分裂程度,說明次站雷達的兩組相對系統(tǒng)誤差估值方案都有效;
② 在減小主、次站雷達觀測航跡的分裂程度上,V1對應(yīng)的系統(tǒng)誤差估值要優(yōu)于V2對應(yīng)的系統(tǒng)誤差估值,取得了較好的航跡修正效果,與圖1的觀察結(jié)果一致。
為了進一步驗證本文方法在工程上的有效性,我們將圖1中的主、次站雷達測量數(shù)據(jù)和次站雷達相對系統(tǒng)誤差修正數(shù)據(jù)加入正態(tài)隨機誤差,連續(xù)進行了50次模擬,次站兩組相對系統(tǒng)誤差估值方案有效性指標(biāo)V1和V2計算結(jié)果如圖2所示,均有1>V1>V2>0的一致性結(jié)論,表明本方法有效,且受隨機誤差影響很小,可以應(yīng)用于實際系統(tǒng)中。
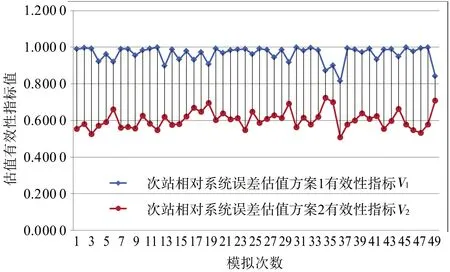
圖2 次站雷達相對系統(tǒng)誤差估值有效性指標(biāo)對比圖
4 結(jié)束語
本文通過計算次站觀測航跡線系統(tǒng)誤差修正前后與主站觀測航跡線的相對熵,構(gòu)建次站修正航跡線系統(tǒng)誤差估值有效性指標(biāo),用以評價系統(tǒng)誤差估值的有效性以及修正效果。在工程應(yīng)用中,很容易得到典型航路上的主、次站觀測數(shù)據(jù),既降低了檢飛成本,又可以保證加權(quán)直線航跡線參數(shù)迭代估計模型的適用性,進而提高本評價方法的準(zhǔn)確性。本方法有助于提高雷達陣地檢飛、數(shù)據(jù)校準(zhǔn)方法選擇和雷達相對系統(tǒng)誤差估值表計算過程中對系統(tǒng)誤差估值評價的科學(xué)性、準(zhǔn)確性和可操作性,從而提升雷達網(wǎng)目標(biāo)狀態(tài)估計和多雷達數(shù)據(jù)融合的質(zhì)量。本文給出的方法,對研究基于位置信息以及目標(biāo)空間運動特征的航跡關(guān)聯(lián)算法也具有一定的借鑒意義。
猜你喜歡
藝術(shù)生活-福州大學(xué)廈門工藝美術(shù)學(xué)院學(xué)報(2022年4期)2022-09-22 07:40:32
甘肅教育(2020年6期)2020-09-11 07:45:28
大眾投資指南(2020年10期)2020-07-24 08:03:48
甘肅教育(2020年12期)2020-04-13 06:24:56
活力(2019年22期)2019-03-16 12:47:08
翻譯界(2018年2期)2018-03-05 07:55:16
數(shù)學(xué)大世界(2017年31期)2017-12-19 12:29:35
散文百家(2014年11期)2014-08-21 07:16:22
中國航海(2014年1期)2014-05-09 07:54:30
體育師友(2011年5期)2011-03-20 15:29:48
