大規模無環有向管網中移動物聯網監測進展
2020-09-04 03:15:34涂經科梁俊斌王天舒
計算機工程與應用 2020年17期
關鍵詞:系統
涂經科,梁俊斌 ,蔣 嬋,王天舒
1.廣西大學 計算機與電子信息學院,南寧 530004
2.廣西多媒體通信與網絡技術重點實驗室,南寧 530004
3.東軟集團(南寧)有限公司,南寧 530007
1 引言
大規模無環有向管網(Large-Scale Acyclic Directed Pipe Networks,LSADPN)是指城市供水管網、石油及天然氣供給管網等可以建模為無環有向圖(DAG)的管道系統[1-4],如圖1 所示[5]。LSADPN 是影響國家經濟發展和社會穩定的關鍵戰略基礎設施,需要保證它們安全穩定運行[6-9]。但是,LSADPN 往往具有分布地域廣闊、連接復雜、深埋地下等特點,因此對它們進行實時、全面且準確的監測十分困難[10-11]。
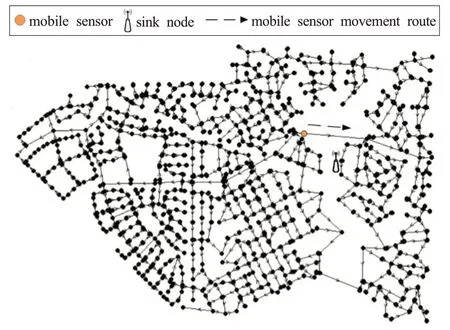
圖1 LSADPN無環有向圖
為應對各種污染和泄露事件對LSADPN 基礎設施的挑戰,對LSADPN 實時監測系統被認為是至關重要的。在傳統的監測方案中,針對由化學或者生物污染造成的污染事件和由于管道受到老化、破損和人為惡意破壞造成的泄露事件,往往是通過安置靜態檢測儀器來進行監測[12-15]。但是,用于管道監測的靜態傳感器的價格較為昂貴,并且對安裝的位置有嚴格限制(例如:電子放大聽漏儀要求安放在管道的暴露點,并且周邊噪音小),因此只能安裝在部分重要位置,監測范圍較為有限[16-19]。
近年來,隨著納米技術、傳感技術和通信技術的發展,有研究提出基于移動物聯網的監測方法,可投放一定數量的移動傳感器,從管網中獲取數據取得較準確的監測結果。整個監測系統由匯聚節點、移動傳感器組成,它們的功能及特點描述如下:
(1)匯聚節點。是一種具有較強通信能力的節點,可以在相應的管道接口結點預先布置一定數量的匯聚節點,以收集或接收移動傳感器上傳的流體數據。
(2)移動傳感器。在基于移動物聯網的LSADPN監測系統中移動傳感器通常可分為兩類,一類是自主移動的傳感器,一類是非自主移動的傳感器。①自主移動的移動傳感器,具有水質監測能力,還有較強的數據、通信和計算功能,同時具有動力單元可按規劃路線自主行動。②非自主移動的移動傳感器,具有水質檢測的能力,還有有限數據存儲、通信和計算功能,但是沒有動力單元,無法自主移動;系統進行監測時,可以根據用戶成本投入指定數量的移動傳感器到LSADPN中,讓它們隨著管網內的液體流動,從內部進行更準確的監測。當它們經過匯聚節點時,可以通過匯聚節點并上傳數據。
目前,基于移動物聯網的LSADPN監測系統中遇到的主要困難包括:
(1)節點布置范圍受限,投放位置難以確定。在LSADPN 中,管道深埋地下且分布廣泛,不同地域下的管道密度懸殊,如部分地域管道分支分布密集但部分地域管道分支分布稀疏。因此,難以通過大范圍部署移動節點和匯聚節點覆蓋大部分管道。另外,許多管道的接口處無法安置匯聚節點或者投放移動傳感器,因此如何確定合適的管道分支來部署匯聚節點和投放移動節點是一大難點。
(2)監測系統成本有限,難以大范圍投放節點。首先,在LSADPN 中,管道為無環有向管道且管道中的流體流向為單向流向,節點可能因為管道某處堵塞或閥門關閉而無法正常運動。因此,可能會出現一個管道中有多個節點進入而重復檢測或者部分管道沒有節點流入而無法被檢測等問題,出現多個節點浪費的情況。其次,在監測成本一定條件下,節點的投放數量有限,無法通過大量部署匯聚節點和釋放移動傳感器來達到較高的性能指標。
(3)LSADPN 中流體運動十分復雜,計算困難。在基于移動傳感器的LSADPN監測方案中,難以對復雜的流體運動進行較為準確的模擬和計算。在以往的文獻中,一般會假定管道內流體的速度與容量是固定的,不會隨著時間改變,隨著流體漂流的節點移動速度也是穩定不變的。然而,在實際的LSADPN 中,流體的速度經常會隨著時間呈現不同的變化(如管道閥門關閉造成的流體速度為零;不同區域與時間的用水量高峰期造成流體速度大幅變化等),靜態的穩定流體速度模型只適用于少數的情況。根據流體速度變化的規律,將流速速度變化模型分為三種模型:靜態穩定流體模型、動態穩定流體模型和動態隨機流體模型。靜態穩定流體模型適用于管道內水壓和流體流速不變的流體模型;動態穩定流體模型是指根據時間的變化可推導出流體速度呈現規律變化的流體模型,例如通過把時間當作參數推導出流體速度隨時間變化的函數,可以用來模擬城市一天的用水量變化情況;動態隨機流體模型是指管道內水壓和流體速度隨著時間推移呈現不規則變化的模型,如水管的爆裂、地震等災難造成的管道內流體速度的不規則變化等。
(4)監測系統的性能指標考慮不足。在LSADPN中,往往根據不同的研究目標會設置不同的性能指標。LSADPN 監測系統的較為重要的監測指標為:監測范圍、監測事故的精度、保護人口等。以監測范圍為監測指標時,可能會造成高覆蓋、低人口的情況;以監測事故的精度為性能指標時,固定成本下有限的節點數量難以大范圍覆蓋管道實現事故的高精度定位;以保護人口為性能指標時,單一指標又會降低其他性能指標的要求。另外,在現實生活中監測需求往往是復雜且變化的,因此如何設置性能指標框架,使其能滿足實際的監測需求是一大難點。
本文將對LSADPN 中基于移動物聯網的監測方案進行綜述,主要貢獻為系統地歸納了基于移動物聯網中不同節點的部署方案,并以此為主軸介紹了部署方案的現狀。
2 國內外研究現狀
目前,已經有部分工作研究如何基于移動物聯網來對LSADPN進行監測。根據感知數據上傳的方式,可以將這些工作劃分為兩類:非自動上傳數據的方案和自動上傳數據的方案。
2.1 非自動上傳數據的方案
所謂非自動上傳數據,是指依靠人工捕獲移動傳感器的位置并上傳數據。這些移動節點相互獨立,互不通信。在這種方案中,可以通過投放大量移動傳感器來對管網進行大范圍的覆蓋。但是節點之間沒有數據交互,通常無法判斷獲得監測數據的時間延遲[20-23]。
為了能更好地定位移動傳感器在管道中的位置,Kim J H 等人[24]提出了一種基于RFID(無線射頻識別標簽)的監測方法SPAMMS。該方案在管道內每隔一段距離就貼一個RFID標簽,移動傳感器經過標簽時,獲取標簽中的位置信息。最后在末端的泵站收集漂流的移動傳感器和監測數據。然而,在長距離管道的情況下,移動節點經常會因為撞擊或者能量耗盡而暫停工作,無法繼續接收流體數據。
為了改進SPAMMS 中的問題,文獻[25-26]提出了基于移動節點維護和能耗的長距離管道泄漏監測系統。Almazyad A S等人[25]提出的設計方案基于在管道內部署一組移動無線傳感器節點,并允許它們按照預定順序協同工作。在這種機制下,一次只有一個節點處于活動狀態,而其他節點處于休眠狀態。下一次喚醒的節點根據三種喚醒技術之一進行喚醒:基于位置的、基于時間的和中斷驅動的。然而,在移動節點能耗的降低下,泄漏檢測的精度也會隨之下降。
為了進一步提高泄漏檢測的精度和智能性,Liu Y等人[26]提出了一種利用固有模函數、近似熵和主成分分析法構造信號特征集,并利用支持向量機(Support Vector Machine,SVM)作為分類器進行泄漏檢測的泄漏識別方法。文章提出了一種基于無線傳感器網絡的管道監測系統和基于支持向量機的泄漏識別方法。機器學習可以模擬人類通過學習活動獲取知識的過程,能夠使泄漏檢測的精度和智能性自動提高。
通過分析以上的算法可以發現,該類方案通過投放大量的移動傳感器,并在管道上安裝RFID 來實現移動傳感器的定位,從而實現較高的監測精度和較廣的監測范圍。同時,考慮到移動傳感器的有限能耗,進一步對移動傳感器的能耗、監測精度進行了智能優化,實現了較低的能耗與較高的監測精度。這些算法都是適用于需要覆蓋范圍較廣的管道應用場景,并在此之上進一步提高管道監測精度。以上算法的性能優缺點,如表1所示。
以上這些方案具有成本低、監測范圍廣的優點,但是文中移動傳感器的投放位置只考慮一個,不適用于多個移動傳感器的部署方案,無法有效地對管網進行大范圍覆蓋。
為了改進以上問題,且以最少的節點滿足較大的管道監測范圍和事故定位的精度,Suresh 等人[27-28]設計了一個高概率覆蓋整個管網的解決方案。該方案采用多個移動傳感器進行投放,利用信標節點(RFID)來事故進行定位。他們更進一步提出在一定成本下,如何部署有限的移動傳感器使得管網覆蓋面積最大化問題[29]。該文利用整數線性規劃(Integer Linear Programming,ILP)和貪婪啟發式(Greedy Heuristic Method,GHM)方法對問題進行了新的建模,實驗結果證明,算法得出的管網覆蓋面積比之前的更大。由于實驗中未考慮非線性的影響因子(如流體流速等),而采用整數線性規劃對問題建模,使得定位的精度出現較大的偏差。

表1 基于非自動上傳數據單投放位置的監測算法優缺點對比表
為了使得定位的精度更加準確,文獻[30]將傳感器和信標節點的最優配置問題描述為一個混合整數非線性規劃(Mixed Integer Nonlinear Programming,MINLP)問題,以在預算約束下使定位精度最大化。他們提出以最大化平均感測覆蓋(Maximize Average Sensing Coverage,MASC)和最大化下限感測覆蓋(Maximize the Lower Bound Sensing Coverage,MLBSC)為性能目標。實驗結果表明,MASC 和MLBSC 的性能都優于使傳感器數量最小化的解決方案。但是該算法的復雜度較高,且需要部署大量的RFID來實現更大的管道監測范圍。
分析以上的算法可以發現,在一定成本的限制下,該類方案通過尋找最佳的移動傳感器部署位置來達到較大的監測范圍和較高的監測精度。同時,將監測事件中非線性的影響因子納入計算公式,進一步提高監測精度,提升監測系統的性能。這些算法都適用于覆蓋范圍較廣和對精度有較高要求的應用場景,通過不斷優化算法,達到更廣的監測范圍和更高的監測精度。以上各個算法的優缺點,如表2所示。
本節的所有方案都是通過RFID 來實現LSADPN監測系統中移動傳感器的事件定位,但是在管道分支分布密集的區域,有限的成本下無法部署大量RFID 來實現移動傳感器的定位。另外,該類方案需要人工物理在管道的末端出口捕獲移動傳感器,各個傳感器之間互不通信,無法控制監測延遲。
2.2 自動上傳數據的方案
為了控制時間延遲,另一種研究方案是采用監測數據自動上傳的方式。根據移動傳感器是否能自主移動,自動上傳的方式分為兩種情況。第一種是利用自主移動傳感器進行監測。這類傳感器通常具有自主移動能力和較強的通信能力,能及時到規定區域收集并且上傳監測數據[31-35]。第二種是利用非自主移動傳感器進行監測。這類傳感器通常不具備動力裝置,它們隨著液體漂流,通過接收器節點上傳數據[36-39]。
2.2.1 自主移動傳感器監測
該類方案中,移動傳感器可以自主行走、收集并上傳監測數據,因此能更方便地到達事故區域。但是這類移動傳感器價格較為昂貴,在固定成本下,可投放的數量十分有限,無法對網絡進行大規模的覆蓋。并且由于大部分管道遠離地表,向地表基站的通信比較不穩定。
為了對水下的石油和天然氣管道進行監測,Khan A等人[40]提出一種基于視覺反饋的水下自動機器人控制方法。機器人自帶有攝像機,對捕捉到的管道圖像進行處理,以獲取管道的方向信息,跟蹤管道進行檢測。然而,即使在最佳的水下條件下,水下能見度范圍也往往只有幾米。因此,通常很難通過攝像頭捕捉的管道圖像來確定大面積管道的狀況。
為了進一步提高管道檢測定位結果的可靠性,Guan M等人[41]提出了集成一個海底探測器和網絡上的船載水上和水下集成移動地圖系統。該系統的數據采集包括聲學圖像和管道路由的水上和水下地形圖。文章中設計了一種位置偏差校正方法以提高管道的精度檢測定位,即實時動態定位數據中的管道定位校正和綜合數據中的管道水平路由校正。以上兩種方案只能監測管道外部的破損情況,無法對管道內部流體進行監測,獲取流體的質量數據。
為了更好地獲取流體信息,以便判斷污染和泄漏等情況。Basagni S 等人[42]提出,每隔一段距離就放置一個用于監測流體的固定傳感器。文中利用自動水下機器人定期從水下各固定傳感器收集數據并傳送到位于水面或陸上的匯聚節點。該方案利用整數線性規劃模型模擬機器人移動路徑。但明顯該方案的水下監測范圍依賴于固定傳感器布局,并且成本固定情況下,很難部署大量的節點進行大范圍的監測。
以上這些方案都是通過操控可自主移動的航行器來實現對管道的監測。這些航行器可經由控制中心操控,達到特定管道進行詳細的檢測。這些算法都是針對水下管道監測的應用場景,同時不斷優化算法,達到更大的監測范圍和監測精度。但是這些自主移動的航行器成本昂貴,投放的數量十分有限,只能對特定的管道分支進行監測,無法覆蓋大面積的管道。另外以上方案中的機器人都未進入管道,且都只能用于水下管道的監測。以上各個算法的優缺點,如表3所示。
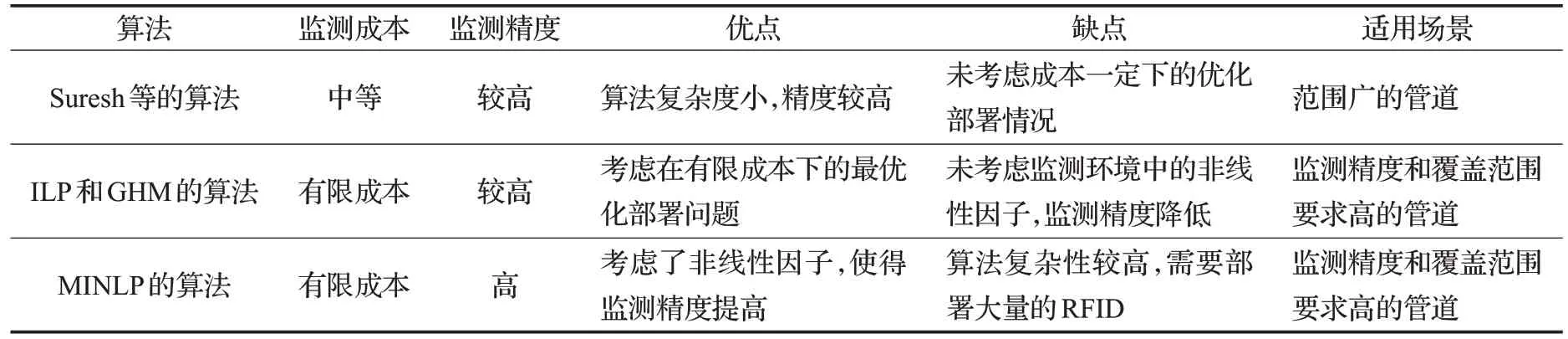
表2 基于非自動上傳數據多投放位置的監測算法優缺點對比表
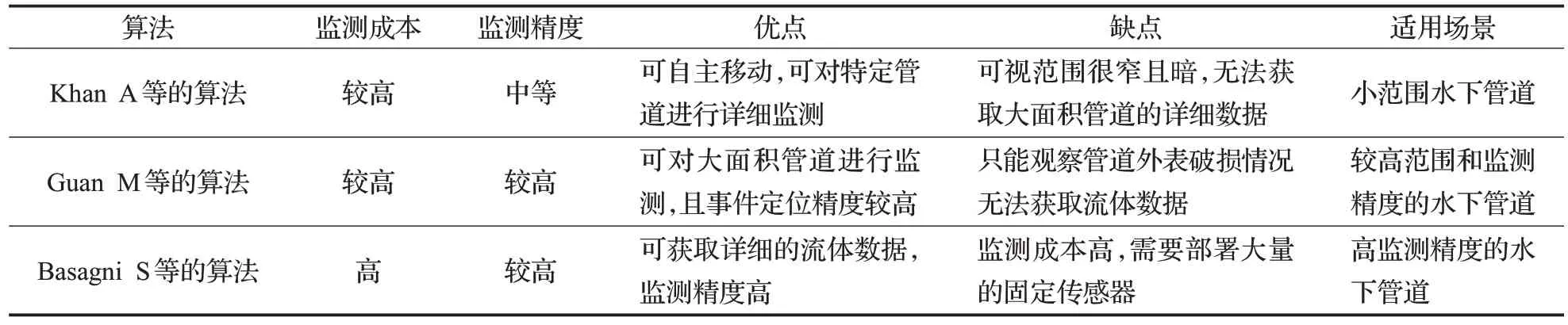
表3 基于自主移動傳感器的水下管道監測算法優缺點對比表
為了能適應管道的所在不同地理環境,Li X、Yu W等人[43-44]研究了復雜管道中自主機器人的最優檢測問題。通過尋找區域內所有邊界點都可見的最小點集來實現覆蓋整個管道,然后利用自主機器人進入管道,依次到達這些點,收集管道內的流體和管道信息。但是該文所提出的“畫廊守衛”路徑規劃算法,是針對凹凸不平的墻面,應用在管道模型上還是有所缺陷。
Edelkamp S 等人[45]提出了一種三維管道檢測的方法。首先,該方法生成一組在期望的檢查質量下其聯合可見性覆蓋檢查區域的航路點,在生成航路點后,采用多目標運動規劃方法,計算出一條無碰撞、動態可行的軌跡,該軌跡訪問所有的航路點,同時尋求最小化行駛距離來覆蓋整個管道。
以上兩種的路徑規劃算法通常依賴于將無障礙空間分解為凸的無障礙區域,導致管道模型的處理精度不高,規劃路徑不是最優。文獻[46]提出了一種基于快速探索隨機樹(Rapidly exploring Random Trees,RRT)的運動規劃算法,基于RRT的方法可以直接處理非凸的自由空間,因此比文獻[44-45]中移動規劃算法所需的幾何表示更容易生成。
以上這些方案研究了管道中自主移動傳感器的運動規劃優化問題,該問題基本分為三個步驟:(1)生成最小點集;(2)找到訪問這些最小點的最佳順序;(3)生成可行的運動路徑,以按照最優的順序訪問最小點。但是由于移動傳感器的自身能力(如:電源、數據存儲能力等)和管道障礙的限制,步驟(1)甚至(2)的最優解可能是不可行的。因此,如何將所有這些問題和從一層到另一層的反饋信息結合起來,是一大難點。這些算法的監測精度較高,但是由于自主移動傳感器成本較為昂貴,可投放的數量較少,無法實現大范圍的管道覆蓋。因此,這些算法主要適用于精度要求高但覆蓋范圍較小的應用場景。以上各個算法的優缺點,如表4所示。
2.2.2 非自主移動傳感器監測
這類方案中移動傳感器往往不具有動力裝置,只能隨著流體漂流收集數據,在遇到接收器時上傳監測數據。采用接受器上傳數據的方式降低了對移動節點的要求,但是網絡的整體覆蓋效果十分依賴于監測系統的布局。
Oliker N 等人[47]描述了一種適用于無環有向管網系統中固定傳感器和移動傳感器的二元整數規劃模型。該方法通過計算匯聚節點和移動傳感器的組合方式和投放位置,最大化管網系統的監控范圍。在此之上,他們更進一步利用貝葉斯定位方法(Bayesian Localization)提高污染事件的定位精度,同時大大提高了監測精度[48]。
雖然以監控范圍為性能指標會最大化監測區域,但是可能會造成高覆蓋、低人口的情況,因此更需要高覆蓋的是人口密集的區域。
為了改善以監控范圍最大化為性能的缺陷,Du R等人[49]以保護人口為性能指標,提出了一種新的優化方案,利用優化的貪婪算法來研究移動傳感器和匯聚節點的部署位置,從而達到監控范圍內的保護人口的最大化。然而,文章中卻沒有提及如何對感興趣的管道區域進行劃分。
Venkateswaran P 等人[50]開發出了一種新的自適應監測水分布網絡的混合體系結構。該文采用兩階段規劃和部署方法,首先集成工作結構、事件,以及社區信息和模擬基礎分析,其次確定安裝現場傳感器和主流化基礎設施的分配。該混合體系結構可以在網絡中根據需要自適應地調整感知分辨率,根據事件確定所需的感知能力,并對變化的事件嚴重性做出響應。
以上這些算法主要是針對固定成本下性能指標最優化的問題進行求解,即首先計算合適的匯聚節點與移動傳感器的數量搭配比,然后再選擇最優的位置進行傳感器的投放或安裝。該類方案的監測范圍較大,多個移動傳感器與匯聚節點組成的移動傳感網絡使得監測延遲大大降低。前兩個算法以最大化監測范圍作為性能指標,適用于范圍較廣和監測精度較高的應用場景。后兩個算法則以保護人口作為性能指標,適用于人口密集的管道區域。但是以上的算法都是以單個目標為性能指標,在實際的監測過程中,必須同時考慮故障檢測率、覆蓋率、時間、延遲等多個目標。以上各個算法的優缺點,如表5所示。
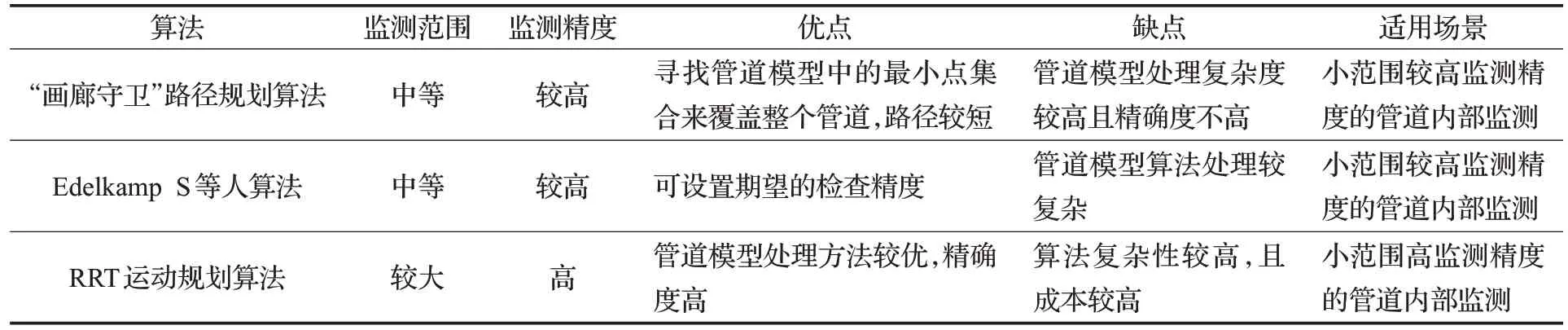
表4 基于自主移動傳感器的運動規劃監測算法優缺點對比表
Perelman L S等人[51]以檢測故障概率、識別管道故障位置率和故障定位準確率為性能指標,研究了大型無環有向管網系統管道故障位置識別的傳感器優化配置問題。這個問題可以看作是一個最小測試覆蓋(Minimum Test Coverage,MTC)問題,并且是NP 難的。文章提出了兩種貪婪算法,最后給出一些實際的供水網絡模型進行了詳細的計算實驗。
在此之上,Sankary N等人[52-53]構造了一種多目標混沌遺傳算法。這個多目標框架提供了高性能權衡集,將監測系統的系統成本與眾多性能目標進行比較,以提供高性能和彈性的監測系統。為了自定義多目標之間的權重,使得系統具有較好的性能,Aral M M等人[54]提出了一種基于多目標的算法框架。該文中自定義不同目標的權重比例,然后采用遺傳算法求解移動傳感器的部署位置,使得總性能期望最大化。該方案利用權重平衡多個目標參數,但是沒有考慮在不同監測事件下,各個目標權重的比例和變動情況。
以上算法都是采用多目標性能指標算法來監測管道的故障事件。對比單目標性能指標的算法,多目標性能指標算法可以更好地應對實際的復雜管道故障事件,更好地平衡不同的性能指標,達到較優的監測效果。但是在調配不同事件不同參數的權重時,往往需要人為調試權重,可能導致最終的監測效果不佳。第一個算法適用于監測精度高和覆蓋范圍廣的管道,后兩個算法性能指標是多目標性能框架,更適用于復雜故障的管道監測。以上各個算法的優缺點,如表6所示。
3 應用
隨著納米技術、傳感技術和通信技術的發展,采用基于移動物聯網的監測技術來執行監測任務,逐步成為可能。例如:SPAMMS[24]、MISE-PIPE[55]、PipeProbe[56]等。相比于靜態傳感器的監測方案,基于移動傳感器的監測方案能夠進入管道內部,更詳細收集具體的流體信息,達到更優的監測效果。基于移動物聯網監測方案中,能夠實時獲取詳細的流體數據,有利于對管道故障的準確分析,判斷LSADPN 中流體信息不斷更新的情況,用于分析、建模和控制管道監測系統是十分便利、可行的。
Chen Y等人[57]開發了一款基于無線傳感器網絡解決方案的遠程實時高頻水質監測系統。該項目開發的水質監測系統利用BIO(Bristol Is Open,一家由布里斯托爾大學和布里斯托爾市議會組成的合資企業)的基礎設施進行無線通信和數據處理、存儲和再分配。該系統借助于物聯網時代開發的云計算、軟件化網絡和開源平臺,由數據采集、數據傳輸、數據存儲和數據可視化等全過程組成,如圖2所示。
另外,他們在實驗中利用BIO 提供的Wi-Fi 網絡在布里斯托爾市區實時、高頻地收集水質數據。該系統易于擴展到多個站點,建立一個大型傳感器網絡,進行大范圍的管道監測。該系統還具有高采樣頻率、低成本和從網頁獲得實時讀數的特點,獲取的流體數據更準確、及時,監測精度高。
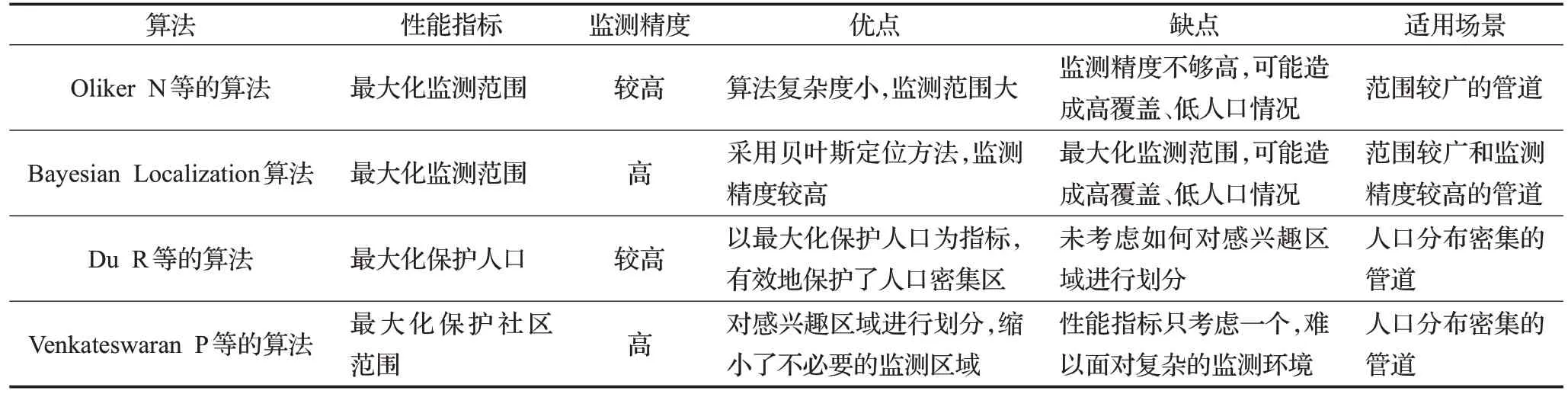
表5 基于非自主移動傳感器的單性能指標監測算法優缺點對比表

表6 基于非自主移動傳感器的多性能指標監測算法優缺點對比表
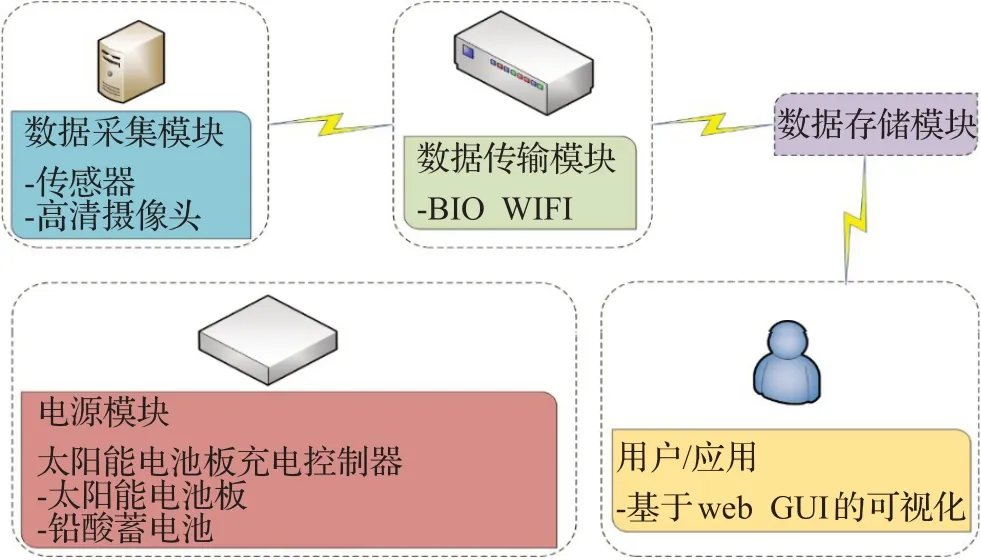
圖2 系統的工作流程圖
Lai T T T等人[58]設計了一種用于管道監測中傳感器自主部署的無線傳感器網絡系統TriopusNet。Triopus-Net的工作原理是自動釋放位于水管源頭集中存儲庫中的傳感器節點。在自動部署期間,TriopusNet 運行傳感器部署算法來確定節點的位置。當節點在管道內流動時,它通過延伸機械臂將自身鎖定到管道的內表面來執行放置。通過不斷地將節點釋放到管道中,TriopusNet系統構建了一個由相互連接的傳感器節點組成的無線網絡,如圖3所示。

圖3 管道監測圖
當一個節點在低電池電量下運行或遇到故障時,TriopusNet 系統會從存儲庫中釋放一個新節點,并執行一個節點替換算法,用新節點替換故障節點。最后文章通過在實驗管道試驗臺上創建和收集真實數據來評估系統。與靜態部署相比,TriopusNet 能夠使用較少的傳感器節點覆蓋管道中的傳感區域,同時保持數據采集率高的節點之間的網絡連通性。實驗結果還表明,Triopus-Net 可以從電池耗盡節點造成的網絡斷開中恢復,并成功地用新節點替換電池耗盡節點。
為了提高供水網絡系統的故障恢復能力,Han Q等人[59]提出了一個集成的中間件框架,用于快速準確地識別復雜管道網絡中具有不確定性行為的故障。文中提出的方法將基于物聯網的傳感、領域特定模型和模擬與機器學習方法相結合,以識別故障(管道破裂、污染事件)。由于網絡組件、物理力學和人工操作的限制,這些技術的組合導致了故障識別中固有的成本-精度-延遲權衡。
文章中研究了三個關鍵的恢復問題:在少量故障情況下的多故障隔離、地震等極端事件下的水系統狀態估計和水網污染源識別,同時設計并實現了傳感器仿真數據集成框架AquaSCALE,如圖4 所示,并將其應用于多個并發管道故障的定位。
Sankary N 等人[60]提出了一種預警系統,即在網絡節點處放置固定傳感器,在網絡管道內流動的網絡節點上部署內聯移動傳感器,并通過地面收發器與移動傳感器進行無線通信的數據傳輸和分析,系統操作圖如圖5所示。該預警系統的性能是根據污染檢測所需的時間、檢測可能性、事件檢測前受影響的人口以及小型、中型和大型市政網絡的系統總成本來衡量的。該文利用增廣凌亂遺傳算法進行多目標優化,探討了系統性能與規模的內在權衡。增強的凌亂遺傳算法有助于解決部署的傳感器數量變化的問題。結果表明,每個目標的帕累托前沿與每個解決方案的成本有很好的對應關系,為之后的優化預算決策提供了一個較好的工具。
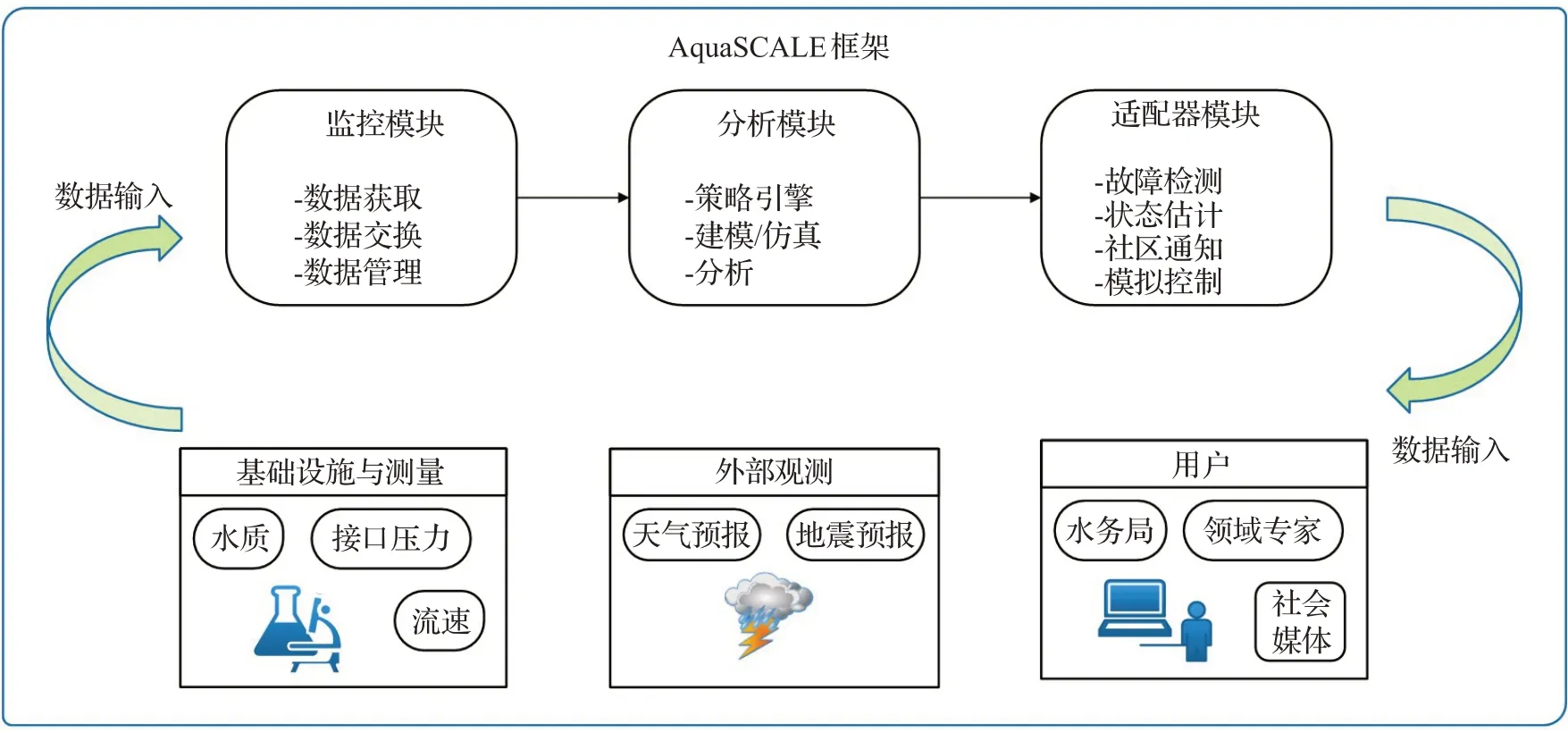
圖4 AquaSCALE系統框架圖
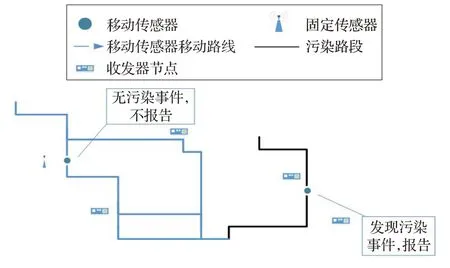
圖5 Sankary N等人提出的系統操作圖
為了降低監測成本,Suresh M A 等人[61]提出了一種移動無線傳感器網絡系統,該系統由移動傳感器(它們的移動借助于基于流量的監控系統中固有的流量)和幫助定位傳感器的靜態信標組成,如圖6所示。該文介紹了第一個完整的結構設計、算法和協議,以實現對基于流量監控系統的最佳監控。該文提出的解決方案包括傳感和通信模型、傳感器和信標通信的MAC 和組管理協議以及傳感器和信標放置算法。最后,通過大量的仿真和概念驗證系統的實現,證明了算法的有效性,例如傳感器數量的顯著減少,而敏感范圍則略有增加。
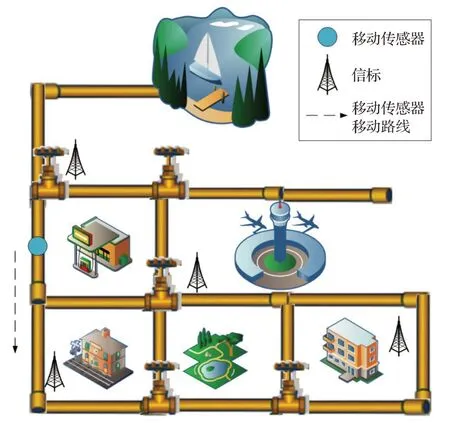
圖6 配水系統監測圖
4 存在的問題以及未來的研究方向
綜上所述,目前已經有許多基于移動物聯網的LSADPN監測的研究,但由于LSADPN中的管道分支深埋地下、分布廣泛、密度不均等特點,使其變成一項較為困難的監測問題。目前的研究方案主要基于單性能指標的最大化和多性能指標的目標函數最大化兩種。在一定的成本下,如何最優化不同的性能指標是研究的重難點。雖然目前已經有一定的研究成果,但是仍然有一些問題,具體主要表現如下:
(1)節點投放數量和部署范圍受限。在以往的研究方案中,往往是以監測范圍最大化為系統的性能指標,這就意味著需要部署更多的移動傳感器和接收器節點。但是由于系統成本的限制,往往只能部署一定數量的移動傳感器和接收器節點。例如,利用RFID 對移動傳感器的定位時,雖然RFID的價格較為低廉,可實現較大數量投放,但是RFID的定位范圍較小,因此無法大范圍覆蓋管道系統;匯聚節點雖然監測范圍較大,但是匯聚節點成本較為昂貴,也無法實現較大數量的投放。現有的分配節點數量以及部署位置的主要方法可分為可自主移動傳感器和不可自主移動傳感器兩類。可自主移動的傳感器方案中移動傳感器的成本較為昂貴,可分配的數量較少,一般是通過計算傳感器的最佳移動路徑來選擇投放的位置。該類方案中的移動傳感器可自主上傳監測數據,實現高精度的監測。但是在固定成本下,難以投放大量的可自主移動傳感器實現大范圍的管道檢測。不可自主移動傳感器方案中移動傳感器成本較低,可實現較大數量的投放,通過貪婪固定成本下的移動傳感器數量和投放的管道位置,依次進行遍歷,得出最佳的節點分配數量和投放位置。該類方案可實現較大范圍的管道監測,但是該類方案中的移動傳感器無法自動上傳數據,通常需要固定的傳感器來收集監測數據或人工收集移動傳感器的監測數據,造成延遲較大、監測精度不高等問題。因此,在有限成本下,如何分配節點的數量,在合適的管道位置投放這些節點,是一大難點。
(2)LSADPN監測系統中非線性因子考慮不足。以上的大部分研究中,都是將監測系統的流體數據當成靜態參數,并沒有考慮非線性因子對目標性能的影響。例如,在實際的流體系統中,管道內的流體壓力會隨著時間做不同規則的非均勻變化。流體速度變化的模型大概可分為靜態穩定流體模型、動態穩定流體模型和動態隨機流體模型,靜態的流體速度模型只適用于極少數的情況。因此,在實際的監測系統中,需要對這些非線性因子的實際變化模型展開研究。
(3)移動節點的通信能力有限,數據傳輸延遲較大。在LSADPN監測系統中,移動傳感器與接收器節點之間的通信基本是采用水聲通信,但是傳播延遲較大,可靠性較低,數據傳輸的丟失率較大。同時,移動傳感器需要經過接收器才能將數據上傳,為了實現較低的數據傳輸延遲,需要大量地安裝接收器節點。但是LSADPN中管道分布廣泛,為了實現更大范圍的監測,移動傳感器和接收器節點的距離常常較遠。因此,如何調整移動傳感器和接收器節點的部署位置,使其具有較低的傳輸時延,同時又有較好的監測性能是一大難點。
(4)LSADPN 監測系統中多性能指標難以平衡。LSADPN 監測系統的研究主要有單性能指標和多性能指標兩類。單性能指標的監測系統只能在特定需求的監測環境中才能更好地使用。但是面對實際的復雜需求時,往往需要考慮多個性能指標,并考慮如何分配各個指標的權重使之監測效益最大化。可以根據不同的事件和事件的緊急程度來設定不同的權重分配順序。管道故障情況大概可以分為:管道泄露、管道污染和例行檢查這三種情況。另外,根據管道的故障嚴重程度,緊急程度的不同可劃分為不緊急、較為緊急和緊急。可以分別對這幾種不同的管道故障情況和緊急程度設置相對應的性能目標和權重優先分配順序。例如在面對突發的較大管道泄露事件時,監測范圍和監測精度最為重要,應該分配較大的權重;在面對管道的滲漏時,監測的精度尤為重要,應該賦予更大的權重;在對管道進行例行檢查時,在滿足一定的監測范圍時就必須考慮有限成本,應該對其賦予較大的權重。因此,如何設計一個多性能指標框架,平衡不同的性能指標也是研究中的重點。
針對以上問題,未來的研究方向如下:(1)固定成本下節點的投放數量和投放位置,如何在有限成本下部署一定數量的節點使得監測性能最大化;(2)LSADPN 監測系統中非線性因子的模型建模,對這些非線性因子進行合理化的建模,使得監測性能最大化;(3)設計節點之間的低延遲數據傳輸方法,將移動傳感器收集的數據盡可能地快速上傳;(4)設計多性能指標的性能平衡框架。如何在不同的管道事件中,平衡不同的性能參數,相應地分配適宜權重,使得監測系統的監測效益最大。
5 結束語
LSADPN包括了水、油、氣等大規模管道系統,是國民經濟與安全的重要設施,因此對它們進行快速、有效的監測十分重要。但是,由于大部分管道深埋地下且分布廣泛,使得監測這些管道十分困難。首先,本文介紹了基于移動物聯網的LSADPN監測方案的背景,然后分析、總結了LSADPN系統中不同節點部署方案優劣。最后,雖然現有的研究已經獲得一定進展,但是依然存在一些問題。為了繼續改善LSADPN的監測方案,提出了幾個待解決的問題,并分析了下一步的研究方案。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32