基于深度機器學習的霾污染監測技術
2020-09-02 08:31:34賀園園胡小敏梁騰飛
計算機測量與控制 2020年8期
賀園園,胡小敏,梁騰飛
(西安交通工程學院 土木工程學院,西安 710300)
0 引言
工業持續快速發展,導致空氣污染現象逐漸嚴重,在空氣污染中,霾污染作為一種較為常見的空氣污染現象存在于人類生活中,而霾污染則會影響人類的日常生活,甚至對人體造成傷害[1]。在現代霾污染監測環節中,一般采用遙感技術對霾污染進行實時監控,在較為精準的程度上掌控霧霾的形成地點及形成原因,以此來進行霾污染的治理,在數據收集的過程中,由于其監測范圍較為固定,所受人工外力影響較小,測量的結果相對準確,且數據偏于穩定趨勢。在此基礎上,需要同時對其大氣覆蓋的地面進行有效研究,根據研究結果進行進一步的實驗分析與總結,保障監測對象的存在完整性,加強數據系統操作,并輔助視野較廣泛的無人機進行高空監測,獲取較為科學的霧霾污染信息[2]。為此,對于霾污染的監測及治理逐漸得到人們的關注。
目前已有學者對霾污染監測技術做出了研究,并取得了一定的成果。文獻[3]提出基于單片機的霧霾監測系統。以STC12C5A60S2單片機為核心,分別設計了數據采集模塊、傳輸模塊及處理模塊。該方法精度較高,但對圖像收集的清晰度較低;文獻[4]提出基于VIRR傳感器的霾遙感識別方法,以監測數據為基礎,采用可見光的反射率閾值方法對霧霾情況進行遙感識別。該方法能夠較為準確地完善數據信息,但對于信息采集方面的力度較小,無法保證收集的圖像數據的精準性,且耗費的監測時間較長,投資成本較高。
為此,針對以上問題,本文提出一種基于深度機器學習的霾污染監測技術。通過對霾污染數據的收集進一步完善數據收集系統信息,加強對數據的整合與處理,強化中心系統的數據儲存能力,保證監測數據來源的可靠性,在此基礎上對收集的數據進行處理,根據數據通道的不同將收集的數據信息進行劃分,同時加強系統過濾操作,進一步完善數據信息的準確性,最后對處理后的數據進行監測操作,根據不同的監測對象有針對性地進行實驗選擇,根據霾污染的各項特征進一步提升監測系統的監測力度,最終達到對霾污染監測的目的。該技術在一定程度上實現了對數據的有效分析,完善了監測系統的數據監測能力,操作簡便,成本較低,能夠更好地為使用者所使用。
1 基于三維空間分布圖像的霾污染數據采集
由于霾污染的存在具有高度的特殊性,為此,需對其進行污染數據收集,并對其產生的地點進行精準劃分,以便操作能夠更好地進行。
本文利用監測機器對霾污染生成地區的地形、地面設施以及空中狀況進行研究,并將臨近區域作為實驗地點,進一步追蹤霾污染數據存在的狀況及相關信息,對霾污染產生的不同季節與環境進行分析,根據不同時段的霾污染狀況進行類別分析,同時對不同時間段進行機器數據追蹤,其追蹤圖如圖1所示。

圖1 追蹤圖
將獲取的追蹤信息進行整合,同時劃分集合A作為數據的存儲集合,并在數據儲存的基礎上強化數據分析能力,將霾污染樣本與監測數據相結合,并進行數據比較,分析其比較結果,同時對其進行性能研究,利用霾污染在不同濃度空間的存在結果分析,進一步研究其時空分布及分布規律,以此掌控霾污染可能存在的條件,多次進行機器飛行追蹤實驗,根據不同的污染項目組對霾污染進行數據監測,將較為典型的數據放置在實驗區域的三維分布空間內[5]。其三維分布空間如圖2所示。

圖2 三維分布空間圖
同時加大系統控制操作,找尋污染物存在的垂直分布規律,并將機器進行垂直分布組合操作,完善機器分布規律,進而實現對污染物的標準獲取,在三維分布監測過程中,監測凌晨時間段以及太陽輻射能力最強時間段的霾污染程度,并將獲得的污染數據進行存儲操作,測量此種狀況下的大氣地面累積氣壓以及氣流狀況,并分析空氣流通情況,進一步完善水平方向的空間監測系統,防止污染物的流動,保證數據完整[6]。
由于污染物受所處溫度的影響較大,為此,在監測過程中應不斷注意研究區域的溫度上升狀況,排除存在的特殊狀況,同時注重溫度存在對數據監測的可行性影響,根據不同的航次數據對不同高度的溫度數據進行觀測,并保證在監測過程中盡量縮減查詢范圍,降低監測難度,從而保證監測效率,延長監測系統使用年限。降低污染物對于空氣流動的敏感程度,避免不必要因素對數據收集的影響,并加強系統收集的力度,強化中心系統的收集,進一步提升數據收集的圖像完整性,以便后續操作的進行[7]。
結合溫度垂直輪廓對數據進行分析,整合符合所需數據特征的數據,并將數據進行分類,集中研究分類后的數據信息,并生成數據庫,在生成的數據庫的基礎上完善數據分析研究,掌控霾污染生成的合理區間,在大氣層趨于穩定的狀況下對霾污染數據進行再次集中收集操作,繪制三維空間圖,并不斷推測污染數據產生與溫度的關系,并觀察其遞減斜率與時間的關系,檢測關系數據是否符合預測目標,同時將最終的收集數據整合至集中集合A中,以此進行下一步的數據處理操作[8]。
2 基于深度機器學習的霾污染數據處理
深度機器學習結合了深度學習和機器學習兩種算法,深度學習能夠通過迭代完成學習,尋到最優解,而機器學習是將深度學習人工智能化的一種手段。深度智能學習是利用深度神經網絡來解決特征表達的一種智能學習過程。為處理霾污染數據,引入深度智能學習算法,對霾污染數據進行收集,查詢數據類型,將不同類型的數據代入至神經網絡作為輸入層數據,通深度過迭代得到興趣區域,通過規則處理合成數據,進一步進行角度處理,提升數據監測處理效能,通過上述步驟完成對霾污染數據的監測及處理。
首先根據霾污染數據的濃度信息以及深度機器學習的輸入數據類型對收集數據進行分類[9]。并對數據的適用范圍進行研究,同時不斷過濾產生的干擾數據,在數據生成的過程中加大處理力度,并經過以下步驟完成對收集數據的預處理:
1)利用機器軟件對待處理數據進行讀取,并檢測其存在的狀況是否符合所需狀況,此時,機器軟件將自動打開處理系統對數據進行輻射矯正,并將矯正結果進行記錄與存儲,其矯正圖如圖3所示。

圖3 矯正圖
2)對數據的發射率通道進行數據類型查詢,并將查詢獲取的數據進行幾何矯正操作,使用機器軟件系統加強數據矯正處理。在矯正的過程中利用定位系統加大對數據的位置固定處理,同時建立地面控制點,選取標準的發射率作為輻射數據處理通道,并以此作為數據處理標準點對其他通道數據進行相應的數據處理與操控,對產生的輻射率進行幾何矯正控制,根據發射率產生的數據傳輸功能加大對反射率文件的處理[10]。
3)進一步對興趣區域進行提取,并利用機器行政區域提升數據的興趣操控,并檢查行政區域圖像,利用語言軟件選擇相同的數據處理區間,根據不同的經緯度范圍對數據進行確認,同時對數據發射率文件以及反射率文件進行處理,裁剪所需的數據信息,同時加強理論處理,在集中數據的同時掌控數據存在的必要條件,并根據存儲空間確定數據處理狀況,若區間提取的范圍一直,則認定處理的數據在一定程度上存在著相似性,且處理的數據圖像存在著相關性,將興趣區域進行合成操作,并將發射率通道的數據存儲至中心系統,并將發射率文件置于系統頂部,將反射率通道數據存儲至主系統中,并將反射率文件置于系統底部[11]。依次形成順序文件將數據進行處理分類,根據幾何矯正的數據特征分析數據處理所需條件,并將其與興趣區域提取的數據進行圖像合成操作,選擇適合的規則將圖像進行規則處理,最終獲得合成數據[12]。
4)將所獲取的合成數據進行進一步的角度處理,并設計其角度處理,如圖4所示。

圖4 角度處理圖
將數據的角度數據集系統打開,利用文件特征對其進行數據角度矯正,同時提取矯正后的裁剪角度數據,并根據不同的太陽仰角及俯角標準度數對數據進行整合分析,同時按照衛星所處頂角以及輻射角對數據進行角度處理研究,并按照大小將角度數據進行排列,重新組合數據,獲取新的向量數據組,并將數據組按照時間順序進行調整,進一步提升數據的事件處理效能,采用時間理論分類處理角度數據,按照中心系統指令完成數據圖像處理任務,以完善系統的綜合處理性能,并在處理過程中注重對系統自身監測系統的保護,增強系統操作安全性,提升其可持續發展能力。經過以上步驟,實現對霾污染數據的處理操作[13]。
3 霾污染纏身的條件種類及監測技術
在完成對霾污染數據的處理后,進一步進行霾污染監測操作,并將霾污染產生的種類與條件進行分類,精準監測霾污染存在狀況。
本文將霾污染監測分為以下幾種狀況:
1)對氣溶膠的厚度進行監測。由于空氣污染中氣溶膠的含量較大,對其的監測能夠更為直觀的反應霾污染程度。環境中的氣溶膠的含量由其厚度所反映,為此,本文在天氣狀況不改變的條件下對氣溶膠的密度進行監測,并將監測數據單獨記錄,以避免與其余數據混合,并盡量在短時間內完成對指定空間氣溶膠密度的檢測,并掌握其范圍信息,對霧霾產生的根源數據進行明確解析,并利用機器遙感對影像數據進行監測,同時進行氣溶膠光學的厚度反應,完成初始氣溶膠監測操作。其遙感監測圖如圖5所示。
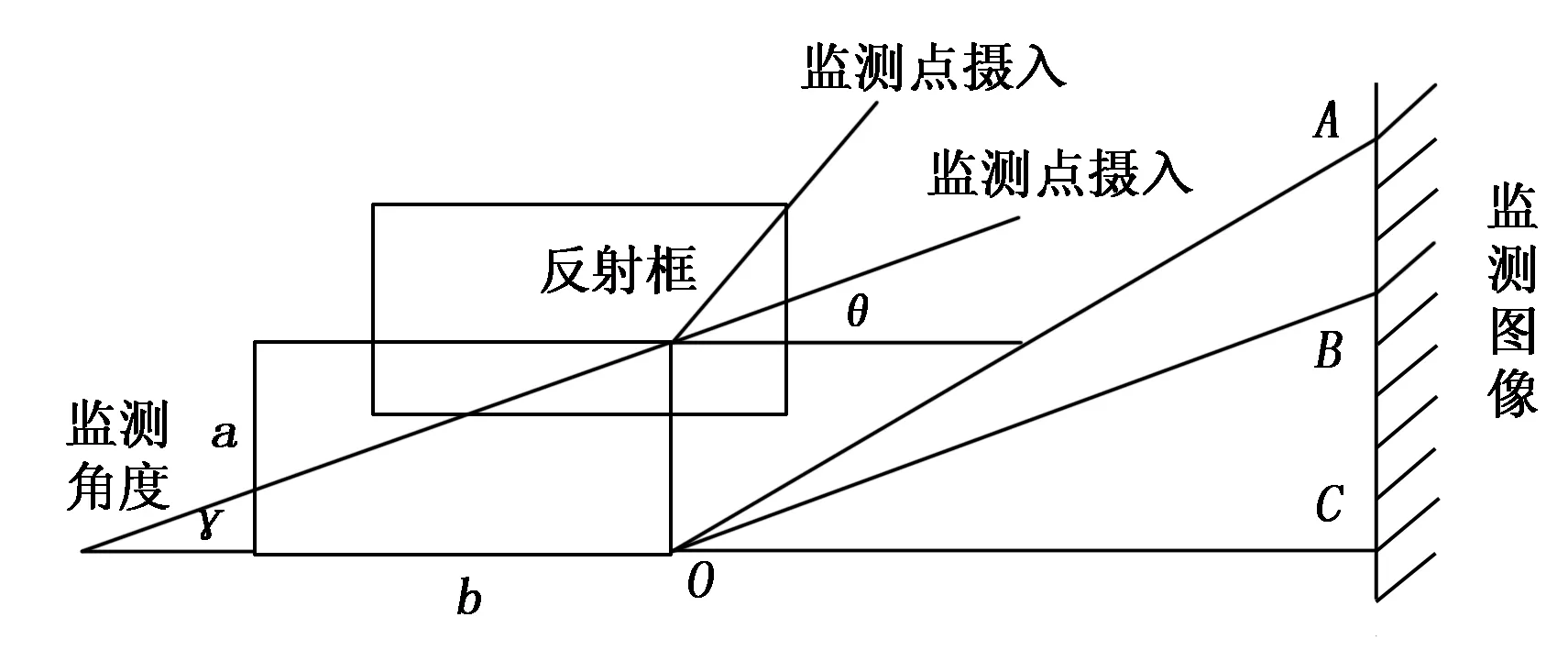
圖5 遙感監測圖
2)進一步對霾污染中具有毒性的二氧化硫及二氧化氮物質進行監測,以處理后的霾污染數據為起源點,將二氧化硫與二氧化氮進行雜質比例對比,將環境中的植物接觸到二氧化硫及二氧化氮所產生的紅外線反射能力強弱作為監測依據,觀察植物狀況,同時對其進行深度分析,分解數據監測所需要求,結合不同圖像的生成需求對監測范圍進行重新調整,在影像監測的過程中綜合考慮圖像數據的重合類別,并將此些數據進行對比,有效分析霾污染中有害物質的存在比例[14]。
3)對秸稈燃燒后的雜質進行霾污染監測,將排出的不同性質的雜質與處理數據進行對比,查找其存在的相似性,由于此些雜質含有大量有毒物質,為此,在監測過程中應不斷注意對雜質發生源的集中處理,并固定霾污染監測位置,以便簡化監測操作,借助高溫像素元與背景像素元在不同長度的輻射段中的能量差異對地面產生的霾污染進行識別,進一步提升系統監測的精準度,根據火點的位置明確霾污染發生地點,并集中實施監測操作[15]。
4)對外界環境中的沙塵暴進行霾污染監測,對大氣中漂浮的雜質進行集中研究,同時對環境流場進行監測,分析環境存在條件,對沙塵產生的各個階段進行集中分析,并總結出時段表,以便監測時間的選擇。對未來一段時間內的環境質量進行預測,同時制定相應的防控措施,明確其發展規律及產生范圍,較為清晰的觀察其影響范圍,并避免監測失誤的產生,其范圍明確圖如圖6所示。
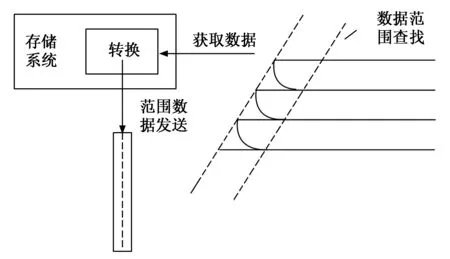
圖6 范圍明確圖
5)利用機器遙感技術進一步增強對工礦環境的霾污染監測,將其中各種性質的雜質進行主要成分分析,避免監測錯誤,對環境中的潛在因素進行整合,降低無關因素的干擾,提升監測系統的監測準確度。
在經過以上的霾污染分類后,完成最終的霾污染監測。
4 實驗與研究
4.1 實驗目的
為了檢測本文基于深度機器學習的霾污染監測技術的監測效果,與傳統基于深度機器學習的霾污染監測技術的監測效果進行對比,并分析實驗結果。
4.2 基于深度機器學習的霾污染監測環境
針對深度機器學習的技術特殊性以及霾污染監測的復雜性,對其進行分析,基于深度機器學習的霾污染監測環境如圖7所示。

圖7 基于深度機器學習的霾污染監測環境
根據上述基于深度機器學習的霾污染監測環境,進行實驗參數的設定,如表1所示。

表1 實驗參數表
4.3 實驗結果與分析
根據上述監測模型進行實驗對比,將本文基于深度機器學習的霾污染監測技術的監測效果與文獻[3]方法、文獻[4]方法的監測效果進行比較,得到的監測準確率對比圖及監測圖像收集完整率對比如圖8所示。

圖8 監測準確率對比圖
對比圖8可知,在相同的參數條件下,文獻[3]方法的監測準確率平均為30%,文獻[4]方法的監測準確率平均為50%,而本文基于深度機器學習的霾污染監測技術的監測準確率較高,平均約為90%。造成此種差異的主要原因在于本文對霾污染數據進行收集,加強了對數據的掌控,同時在相同的條件下有利于對監測實驗的開展,能夠更好地獲取有效數據,消除其他因素的干擾,減少不利因素的影響,最終獲取較為完善的監測圖像,同時便于對監測對象的研究,增強實驗集中性,降低監測誤差,進一步提升監測系統監測性能,最終獲取較高的監測準確率。而傳統方法對此方面的處理較差,初始數據處理不完善,監測準確率較低。
對比圖9可知,在監測樣本數量為100個時,文獻[3]方法的監測圖像收集完整率為20%,文獻[4]方法的監測圖像收集完整率為30%,而本文監測技術的監測圖像收集完整率為60%,在監測樣本數量為200個時,文獻[3]方法的監測圖像收集完整率為25%,文獻[4]方法的監測圖像收集完整率為38%,本文監測技術的監測圖像收集完整率為68%,本文監測技術的監測圖像收集完整率平均值為82%,由于本文對收集的霾污染數據進行二次處理,利用輻射矯正以及幾何矯正的方法加強對數據的處理分析,根據發射率通道的數據進行集中整合矯正,進一步實現了對數據的大規模處理,提升處理的速率,加強對監測圖像的完整度再現操作,完成數據的高度處理,強化圖像的清晰度,增加有用圖像數據的攝入,提升圖像收集的完整程度。

圖9 監測圖像收集完整率對比圖
在此后的監測中,隨著監測樣本數量的不斷增加,本文監測技術的監測圖像收集完整率不斷提升,且一直位于傳統監測技術之上。除以上原因外,本文提升對霾污染的監測力度,從不同的方面闡述霾污染的監測方式,進一步加強系統的監測圖像收集能力,具備較高的數據收集性能,在處理的基礎上強化了中心監測技術,加大對數據的監測改造,減少無關圖像的干擾率,提升系統圖像收集相關性,獲取更加完整的監測圖像數據信息。采取一定的系統自動清理措施,便于后續圖像的查詢。
經過以上對比分析可知,本文基于深度機器學習的霾污染監測技術的監測準確率與監測圖像收集完整率均高于傳統監測技術。在較高的程度上提升了系統的監測性能,同時能夠更好地實現對監測圖像的有效利用,完善監測信息,具備較好的研究價值。
5 結束語
本文在傳統監測技術的基礎上研究了一種新式基于深度機器學習的霾污染監測技術,首先對霾污染進行數據收集,根據不同的霾污染影響程度對數據進行分類收集,在收集的過程中加強過濾系統性能,減少不利因素的干擾,進一步增強系統自身收集能力,在數據收集的基礎上實現對收集數據的處理操作,根據輻射矯正及幾何矯正對數據圖像進行綜合分析,在獲取分析結果后,對分析數據信息進行監測,以不同的霾污染方面作為監測點,同時輔助信息查找及數據解析功能,進一步提升整體系統的監測能力,在最終監測中能夠增強中心系統的自主保護能力,實現對霾污染的準確監測。
相較于傳統監測技術,本文基于深度機器學習的霾污染監測技術在較高程度上提升了中心系統的自主學習能力,增強系統監測性能,能夠更好地為監測中心提供準確的數據信息來源,具備更好的發展空間。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
當代陜西(2019年7期)2019-04-25 00:22:18
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
領導決策信息(2018年26期)2018-10-12 02:18:26
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
家庭影院技術(2017年9期)2017-09-26 03:41:45
