基于電潤濕效應驅動的微泵設計與分析
2020-08-26 03:50:34溫錦鋒陳美蓉
液壓與氣動 2020年8期
關鍵詞:振動
溫錦鋒,江 帆,沈 健,祝 韜,陳美蓉
(廣州大學 機械與電氣工程學院機電工程系,廣東 廣州 510006)
引言
微流體系統廣泛地應用于化學分析、生物防御、分析生物學以及微機電系統(MEMS)等方面[1]。而在許多的微流體系統中,微泵是一個重要的組成部分。
傳統的微泵按照工作原理一般分為機械式微泵和非機械式微泵[2-3]。但是傳統的機械式微泵一般結構復雜,制作成本高,而傳統非機械式微泵一般需要在外部增加復雜的驅動電路或設備。為了克服傳統微泵的不足提出了一種基于EWOD現象驅動的微泵。
介質上電潤濕效應(EWOD)是一種通過施加電壓來改變液滴接觸角大小的方法,如圖1所示。通過改變液滴某一側與固相的接觸角,進而在液滴的表面可以產生壓力梯度,從而可以驅動液滴。在許多的研究中都證明利用EWOD現象驅動液滴是一種可行的方案[4-6]。2011年,SHABANI等[7]提出了一種利用EWOD現象驅動液滴直線運動的微泵。但是還存在一些缺點,例如:
(1) 這種結構的微泵本質上還是離散液滴的移動,并不是連續液體的泵送;
(2) 該微泵的泵送會消耗液滴,所以該微泵若要持續工作需及時人為補充液滴。

圖1 EWOD原理圖
而本研究提出了一種基于EWOD現象驅動的微泵,如圖2所示,該微泵通過EWOD現象控液滴在泵腔內往復周期性的振動,進而實現泵腔內容積周期性變化,再加上錐形流阻單向結構的作用[8-9],從而可以在沒有任何機械運動結構的情況下實現連續流體的持續運輸。

圖2 EWOD微泵原理示意圖
1 電浸潤驅動的原理
1990年MATSUMOTO等[10]就對通過電控制液體之間表面張力的公式進行推導,但是其推導過程中并未明確說明忽略重力的影響以及并未考慮介電層的影響。
為了衡量表面張力與重力大小之間的關系需要計算邦德數Bd:
式中, Δρ為相接觸液體的密度差;g為微重力加速度;r為液體所在的容腔內的當量半徑;σ為液體的表面張力。在微流體系統中r的尺寸非常的小,因此邦德數非常的小,所以在下面的公式中可以忽略重力的影響。
液體表面的改變與單位表面能量的變化有關,在這里定義單位表面能量的大小為γ。其中液-液-固三相的接觸角是由接觸點的力平衡所決定的,如圖3所示。其中初始平衡時的接觸角θ0,可根據楊氏方程給出:
γsl1+σl1l2cosθ0=γsl2
(1)
式中,γsl1為液滴與固相之間的初始單位表面能量;γsl2為外圍液體與固相之間的初始單位表面能量,圖3中液滴為液體1,包裹液滴的外圍流體為液體2;σl1l2為液體1與液體2之間的表面張力。
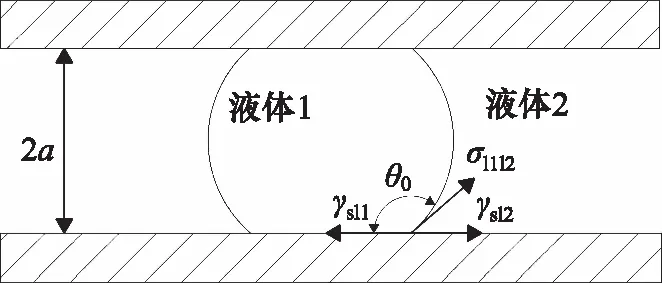
圖3 初始時刻γsl1,γsl2以及σl1l2平衡時的示意圖
根據亥姆霍茲模型,在EWOD現象中可以將介電層看成是雙層平行板電容,因此電容可根據下面公式進行計算:
(2)
式中,CH為亥姆霍茲模型中介電層的電容;ε0為絕對介電常數;εl為液滴的相對介電常數;A為介電層的面積;δ為介電層的厚度。
根據電容的能量公式:
(3)
式中,U為電容的能量;V為電容的電壓。
根據式(2)和式(3)可推導出:
(4)

根據式(1)和式(4)可推導出:
(5)
式中,θew為發生EWOD現象后液滴與固相的接觸角,見圖1。
根據式(1)和式(5)即可得發生EWOD現象之后的接觸角公式:
(6)
根據拉普拉斯方程有:
(7)
式中, Δp為液滴與外圍液體兩相界面產生的初始壓強差;R1,R2為在三維空間中液滴的曲率半徑。
在沒有發生EWOD現象的一端,根據式(2)和式(7),在二維平面上有:
(8)
在發生EWOD現象的一端,根據式(5)和式(7),在二維平面上有:
式中, Δpew為發生EWOD現象之后液滴與外圍液體兩相界面的壓強差;a為泵腔的高度的一半。
所以在液滴沒有發生EWOD現象一端與發生EWOD現象一端之間就會產生一個壓力差ΔpEW:
(10)
根據式(10),因為產生了壓力差ΔpEW從而液滴可以運動。所以當周期性的轉換液滴所觸碰的2個電極的正負極性時即可實現液滴的振動。
2 電浸潤微泵的設計
2.1 微泵的幾何模型
為了初步驗證提出的微泵是可行的,EWOD微泵的模型尺寸,如圖4所示,數值模擬的邊界條件參考了2002年POLLACK等[11]做的實驗以及2006年MOHSENI等[12]做的仿真。在泵腔中負責振動的液滴直徑為1900 μm;泵腔為300 μm×1500 μm×5000 μm的長方體腔體;泵腔中貼有邊長為1500 μm的正方形電極,并在正方形電極上涂有60 nm厚的Teflon介電材料,其介電常數為2.2;錐形流阻單向結構的錐角為9.15°;電線用于連接外部電源正負極;當周期性的轉換液滴所觸碰的2個電極的正負極性時即可實現液滴的振動;在未施加電壓時液滴的初始角度為104°;其中當施加電壓時對應的接觸角如表1所示。
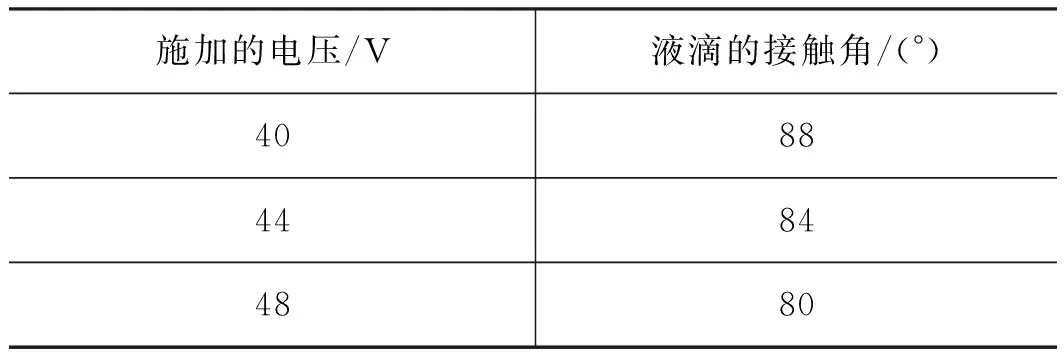
表1 施加的電壓對應的接觸角
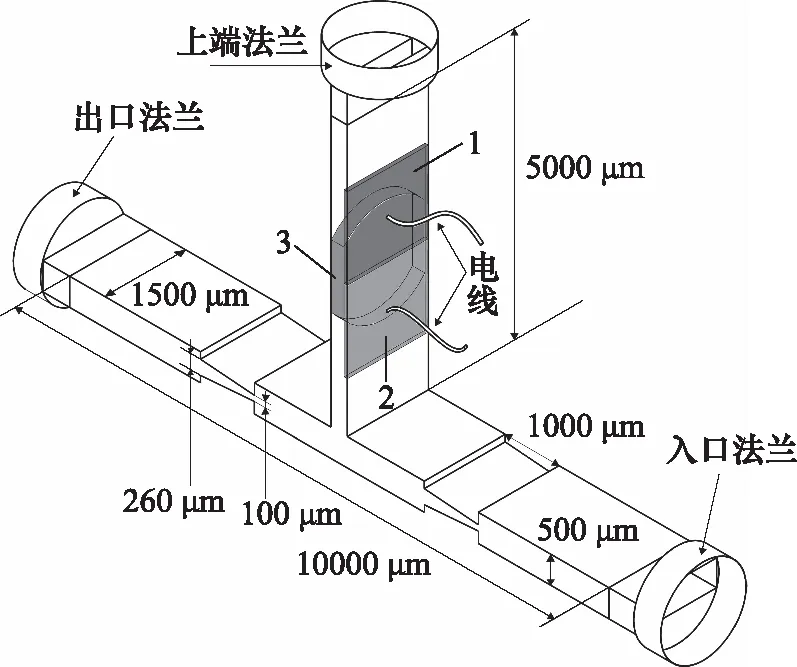
1、2.正方形電極 3.液滴圖4 EWOD微泵結構圖
2.2 控制方程
為了縮短計算時間和節省計算資源對本模型做出如下假設及簡化: ① 假設微泵的工作是在二維平面上的; ② 基于EWOD現象導致的液滴接觸角的變化由式(6)給出; ③ 流體是不可壓縮的; ④ 流體的運動符合層流; ⑤ 流體為牛頓流體; ⑥ 在微尺寸下影響微流體運動的主導作用力不再是重力更多的是表面張力以及摩擦力,因此可以忽略重力的作用; ⑦ 因為電極板和介電層的厚度通常都是納米級別的,因此忽略電極板和介電層的體積。
利用COMSOL Multiphysics中的兩相流-相場模型對本模型進行數值模擬。
其中全局控制方程[13]為質量守恒方程:
ρV·u=0
(11)
動量守恒方程:
K=μ(▽u+(▽u)T)
(12)
式中,ρ為流體的密度;u為速度矢量;μ為流體的動力黏度;t為時間;p為流體的壓力;g為重力加速度;σl1l2為表面張力,其中表面張力σl1l2在僅界面處定義為非零;E為單位矩陣。
2.3 模型校準
在數值模擬分析中,振動的液滴為0.1 mol/L的KCl溶液,被運輸的微流體為配比好的硅油,其基本物理屬性如表2所示。
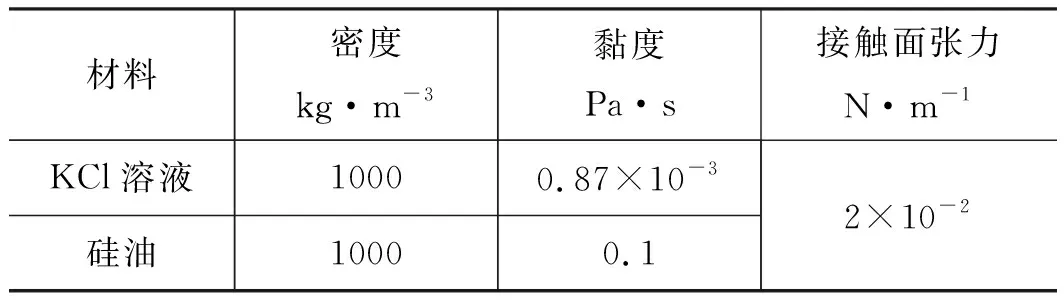
表2 材料的基本物理屬性
圖5展示了單個直徑為1900 μm液滴在0.005 s內分別在電壓40, 44, 48 V作用下在300 μm高的流道內運動的情況;圖6展示了單個直徑為1900 μm液滴在0.005 s內分別在電壓40, 44, 48 V作用下在微泵泵腔內運動的情況。

1.水滴 2.硅油圖5 液滴在流道內的運動圖

1.水滴 2.硅油圖6 液滴在泵腔內的運動圖
圖7展示了接觸角分別為80°,82°,84°,86°和88°時在300 μm高的流道內的速度圖,以及接觸角分別為80°,82°,84°,86°和88°時在微泵泵腔內的速度圖。

圖7 液滴速度曲線圖
仿真的結果與2002年POLLACK等[11]做的實驗和2006年MOHSENI等[12]做的仿真數據相符。
2.4 網格敏感性的驗證
在COMSOL Multiphysics中網格的密度主要由最大網格單元尺寸決定,因此可以通過改變最大網格單元尺寸來改變網格密度,進而評判網格的敏感性。如圖8所示表示在EWOD微泵中最大網格單元分別為0.379, 0.369, 0.359, 0.349 mm時對應的EWOD微泵中液滴運動的曲線最大單元尺寸0.369 mm所對應的速度圖與圖7泵腔內液滴的速度圖是一致的。

圖8 不同最大網格單元尺寸對應的速度圖
從圖8可以看出隨著最大網格單元的減小EWOD微泵內液滴的移動速度也有相應的變化,其中最大網格單元網格尺寸從0.379 mm變成0.369 mm時,泵腔內液滴移動的速度最明顯,但是當最大單元網格尺寸變為0.359 mm以及0.349 mm時泵腔內液滴的速度變化并不明顯。因此在保證計算精度的前提下,從節約計算資源的角度出發,在劃分網格時選取的最大網格單元尺寸為0.369 mm。
3 結果分析
圖9展示了發生EWOD現象接觸角為80°,振動頻率為10 Hz時,一個周期內的EWOD微泵內部流域的運動情況。
圖10展示了發生EWOD現象時接觸角為80°時,4種振動頻率分別為5, 10, 15, 20 Hz的液滴所對應的微泵出口在0~5 s的流量圖。從圖中可以明顯的看出,在微觀上流量是有上下脈動的,但是由于錐形單向流阻結構的作用,在微泵出口處流出的液體比流入的液體更多,所以在宏觀上可以形成單向流動。而且從圖上可以明顯看出在微觀上隨著液滴的振動頻率增加所對應的流量圖上下波動的范圍減小,所以提高液滴的振動頻率可以使微泵的輸出更加平緩。
其中,在第5 s時振動頻率分別為5, 10, 15, 20 Hz 的液滴所對應的流量大小分別為:4.67×10-3,7.34×10-3,8.18×10-3,8.43×10-3mm3,可見微泵的泵送效率和液滴的振動頻率有關。

1.水滴 2.硅油圖9 EWOD微泵內部流域圖
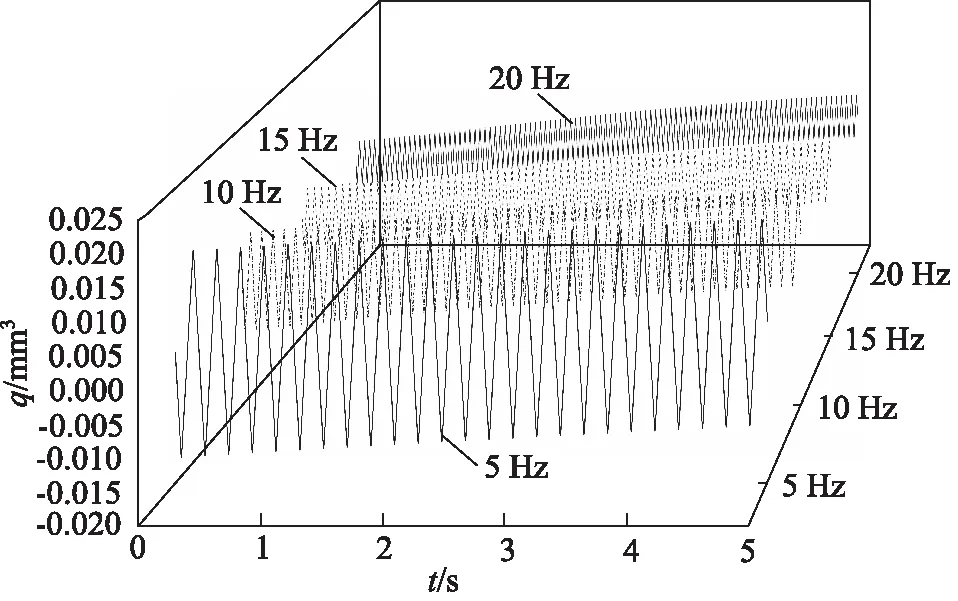
圖10 EWOD微泵出口流量圖
圖11展示了發生EWOD現象時接觸角為80°時,4種振動頻率分別為5, 10, 15, 20 Hz的液滴所對應的的微泵出口在0~5 s的平均壓力圖。從圖中可以看出EWOD微泵出口的壓力是隨著液滴的振動而波動的。
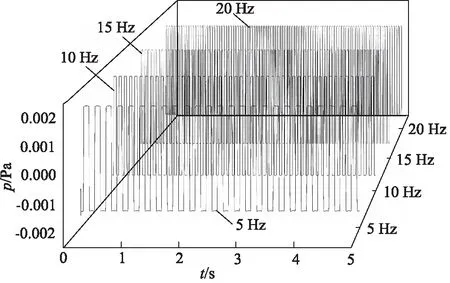
圖11 EWOD微泵出口壓力圖
其中在0~5 s內,頻率為5, 10, 15, 20 Hz時對應的最大壓力均為1.90×10-10MPa,最小壓力均為-1.88×10-10MPa。可見微泵出口的壓力與液滴的振動并沒有太密切的聯系。
4 結論
(1) 本研究的電浸潤微泵提供了一種微泵全新的驅動方式,為微流控系統驅動元件的設計指明了一個新方向;
(2) 通過對電浸潤微泵的進行數值分析,揭示了在工作狀態中微泵內部流域的情況,當液滴向上運動時微流道的液體被吸入泵腔,當液滴向下運動時泵腔內的流體被推進微流道;
(3) 數值分析結果表明當為80°時,微泵的流量隨著振動頻率的增加而增加,而且流量的波動隨著振動頻率的增加而減小。所以提高振動頻率可以增加微泵的流量和減緩流量的波動;
(4) 數值分析結果表明當為80°時,微泵出口處的壓力并沒有隨振動頻率的增加而發生變化;
(5) 對于電浸潤微泵的研究目前還處于理論階段,后續的研究應多從實驗著手獲取更準確的數據。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
大電機技術(2022年5期)2022-11-17 08:12:48
天天愛科學(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數學物理學報(2018年4期)2018-09-14 03:40:58
數學物理學報(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動控制(2015年4期)2015-01-01 07:08:44
計算物理(2014年2期)2014-03-11 17:01:44
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:00
