氣動肌腱拮抗式仿生關節建模與運動控制
2020-08-26 03:50:26艾寧義李鐵軍
液壓與氣動 2020年8期
關鍵詞:模型
艾寧義, 楊 冬, 李鐵軍, 馬 濤
(河北工業大學 機械工程學院, 天津 300132)
引言
手是使人類具有高度智慧的重要器官,也是人類與環境交互的重要環節。隨著社會對機器人技術需求不斷增加,仿人機械手的研發工作得到了迅猛發展。其中驅動技術是仿生機械手研發的關鍵技術。由于直流電機具有輸出力矩大、運動速度快、控制精度高等優點,在機械手中得到廣泛應用。
當前大多數的機械手都以直流電機作為執行器,將其直接安裝在關節位置,驅動關節,或者將其安裝在基座上通過“腱傳動”方式驅動手指運動。文獻[1-5]中是典型的直流電機驅動的仿生靈巧手,但是受限于直流電機的固有特性,這些仿生手使用安全性和柔順性低,并且質量大。電機后置并采用“腱傳動”靈巧手能夠減少手指質量、提高響應速度,但是依然存在柔順性差的問題。
為了擁有柔順的關節特性,許多研究人員將注意力集中在人造肌肉上。目前氣動肌腱作為一種新型標準工業執行元件,因其具有功重比(功率/重量)高、柔順性好、成本低、節能環保等特點,廣泛應用于仿生機器人及機械手等對象的驅動元件[6-7]。采用氣動肌腱驅動的仿生關節可將氣動肌腱固有的柔性融入到關節柔性中,能夠儲存、釋放能量和吸收運動沖擊。但是氣動肌腱所固有的強非線性、遲滯性,建立模型困難,增加了仿生關節位置/剛度控制難度,且仿生關節的位置和剛度兩者存在較強的相互耦合,難以實現關節設定剛度下的高精度位置控制。
國內外學者針對氣動肌腱驅動的仿生關節位置/剛度控制方面進行大量研究。文獻[8-11]實現了氣動肌腱拮抗關節的運動控制,但完全未考慮關節剛度。文獻[12]提出了基本位置控制法(Basic Position Control Method, BPC)、基于模型位置控制法(Model Based Position Control Method,MBPC)及其混合方法實現對關節的控制,并推導了關節剛度模型,但未考慮關節剛度控制。文獻[13]提出了關節剛度控制的預估剛度方法,并基于力學平衡模型、PI控制器的關節位置閉環和關節剛度閉環的控制方法,進行關節剛度與關節位置均為定值的實驗研究,但是關節位置控制精度較低,且未深入研究關節剛度與位置的隨動控制。文獻[14]提出了位置/剛度解算模型,采用模糊神經網絡補償器、PID控制器和模糊神經網絡辨識器構成的控制結構,實現了對關節位置閉環控制和關節剛度開環控制,但因采用了虛功原理建立的氣動肌腱模型,關節模型與實際裝置誤差較大。
針對以上問題,本研究以DMSP型氣動肌腱驅動、腱傳動的拮抗式仿生關節為研究對象,建立單根氣動肌腱數學模型及關節數學模型;基于關節位置/剛度解算模型,采用模糊PID算法實現對該關節的運動控制,驗證了氣動肌腱模型的準確性和控制策略的有效性。
1 拮抗式仿生關節設計
從運動生物力學角度分析,生物的關節是在肌肉與骨骼協同作用下產生運動。人手骨骼肌肉結構復雜,手指關節的運動有很多肌肉參與,除位于掌部的內在肌以外,還有來自于前臂的外在肌[15]。外在肌的肌肉主體位于前臂內,通過長肌腱驅動指關節運動。本研究中僅以中指的掌指關節(MP關節)及可影響其運動的部分外在肌為例,其屈曲運動主要由指深屈肌和指淺屈肌的收縮實現,同時指伸肌的收縮可以完成該關節的伸展運動,如圖1所示,其關節運動范圍為90°。所以,控制中指的掌指關節運動的外在肌構成一組既相互協調又相互對抗的肌肉對。
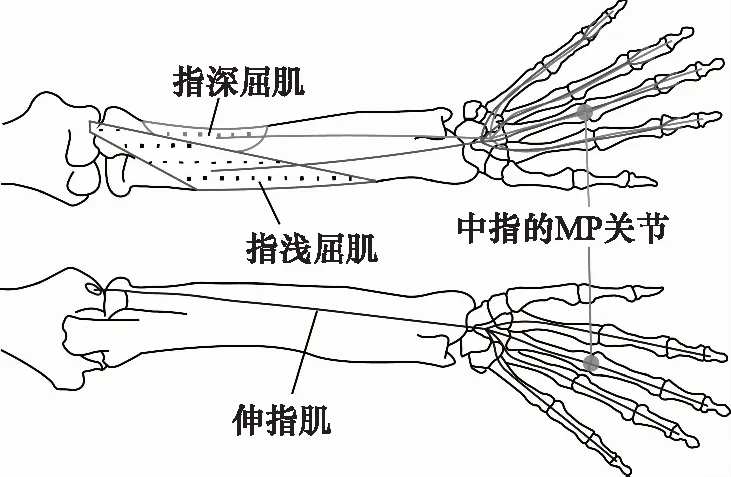
圖1 中指的MP關節和影響其運動的外在肌
因此,受人手骨骼肌肉結構的啟發,設計了一種采用氣動肌腱為關節提供驅動力,傳動方式為腱傳動的氣動肌腱拮抗式仿生關節,其關節裝置和簡化模型如圖2所示。該拮抗式仿生關節主要由主骨架、2根氣動肌腱、腱繩、關節轉軸和擺桿組成。通過調節2根氣動肌腱的氣壓產生拉伸力,由腱繩將力傳遞到關節轉軸,可以實現關節角度在合適的范圍內按照一定的軌跡運動。
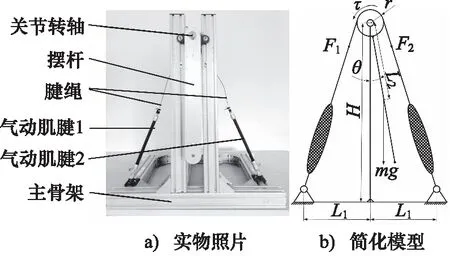
圖2 仿生關節實物照片及簡化模型圖
但是,為保證該關節能夠實現轉動,在關節轉角θ為0 和氣動肌腱輸入氣壓pi=0, (i=1,2)時調節腱繩長度,使其預留一定長度lb,此時腱繩處于松弛狀態。當氣動肌腱內氣壓增大時,氣動肌腱收縮,腱繩被張緊,2根氣動肌腱都既可以收縮又可以伸長,此時關節可以實現順時針和逆時針2個方向的轉動。該關節的相關參數如表1所示。
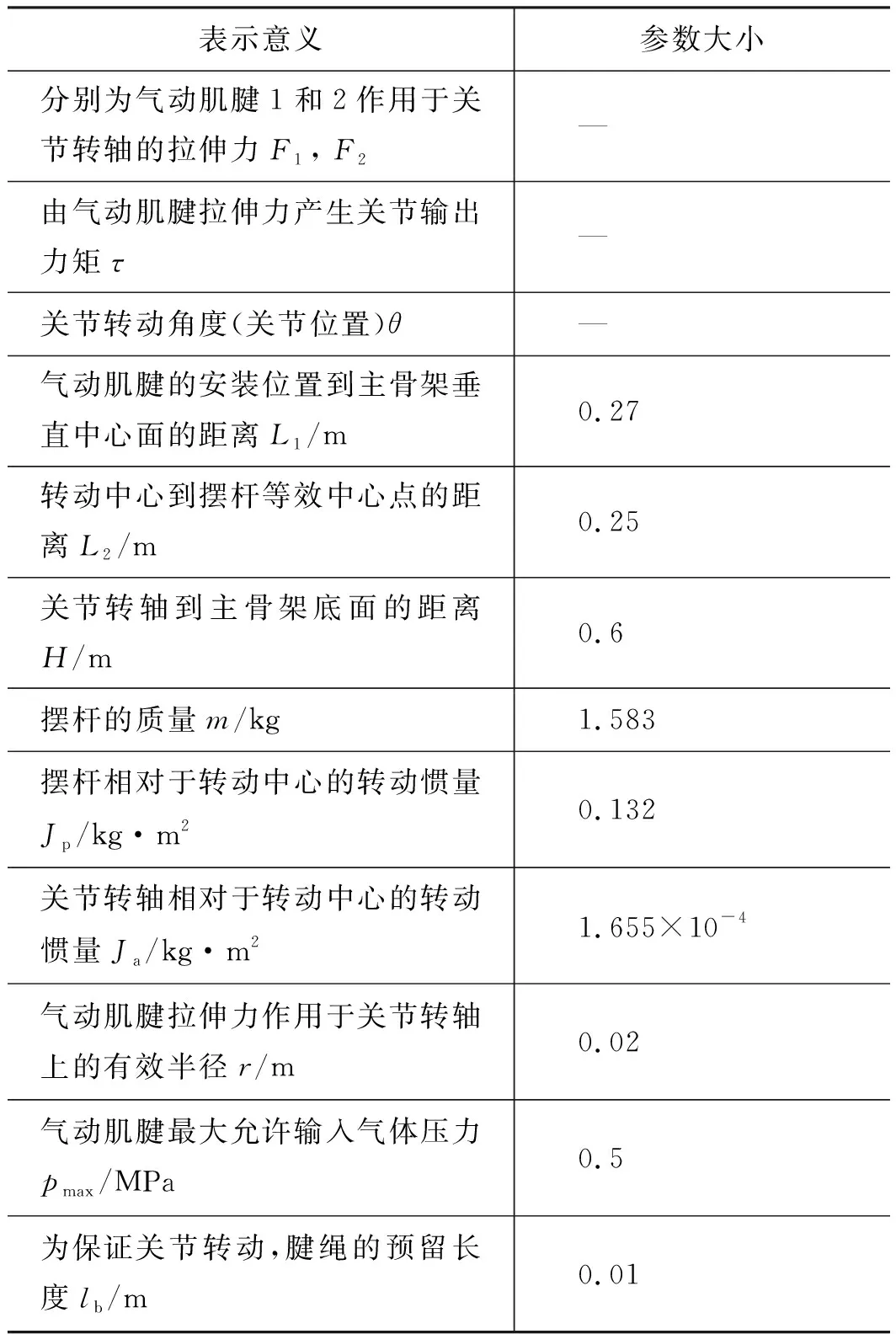
表1 關節相關參數
2 氣動肌腱模型
2.1 氣動肌腱模型建立
將氣動肌腱作為仿生關節的驅動元件,建立精確的單根肌腱數學模型,對于分析關節特性是十分重要的。但由于其強遲滯非線性[16],難以建立精確的數學模型。文獻[11-12]在Tondu-Lopez模型[17]的基礎上,通過使用最小二乘法建立氣動肌腱模型,但需要2次曲線擬合才能完全確定模型參數。本研究以Tondu-Lopez模型為基礎,對擬合方法進行改進,只需1次參數辨識即可確定模型參數。
選取Tondu-Lopez模型為氣動肌腱近似數學模型:
F(p,ε)=f1(p)-100·f2(p)ε+f3(p)·e-40ε
(1)
式中,F—— 氣動肌腱產生的拉伸力
p—— 氣動肌腱輸入壓力
l,l0—— 分別為氣動肌腱實際有效長度和初始長度
fi(p), (i=1,2,3)以氣動肌腱輸入壓力p為變量的函數,一般取為關于變量的p多項式函數:
(2)
式中,aij為待定系數,本研究中取fi(p),(i=1,2,3)為關于氣壓p的一次函數,函數表示為:
f1(p)=a10+a11p
f2(p)=a20+a21p
f3(p)=a30+a31p
(3)
定義矩陣:
A=[a10,a11,a20,a21,a30,a31]T
(4)
為待定系數矢量,使用最小二乘法辨識參數值,則關于待定系數的正則方程為:
CA=F
(5)
(6)
F=[F(1),F(2),…,F(k)]T
(7)
式中,C—— 含收縮率和輸入氣壓的測量值矩陣
F—— 肌腱拉伸力測量值矢量
k—— 試驗測試數據點的個數
由Moore-Penrose廣義逆求得正則方程式(5)的極小范數最小二乘解為:
(8)
2.2 氣動肌腱特性測試與參數辨識
氣動肌腱特性測試平臺如圖3所示,其中包括氣動肌腱本體、拉力傳感器、位移傳感器、拉伸氣缸、電氣比例閥、氣壓傳感器和數據采集卡組成。采用DMSP-10-200-RM-CM型氣動肌腱,一端與機架相連,另一端與拉力傳感器、拉伸氣缸和位移傳感器相連。上位機通過數據采集卡D/A轉換接口控制電氣比例閥,進而實時調節氣動肌腱與拉伸氣缸的氣壓,壓力傳感器反饋實際氣體壓力。通過控制拉伸氣缸的氣壓,可調節對氣動肌腱的拉伸力,實現氣動肌腱的拉伸與收縮,并通過拉力傳感器與位移傳感器測量肌腱拉力與變形量。壓力傳感器、拉力傳感器和位移傳感器的信號通過數據采集卡A/D轉換接口實時傳輸至上位機。

圖3 氣動肌腱特性測試平臺
為了深入分析氣動肌腱拉伸力與肌腱輸入氣壓和收縮率之間的關系,在等壓的條件下對氣動肌腱特性進行測試,測試氣動肌腱在0~0.5 MPa范圍內6個等壓特性曲線。在每次實驗中,保持肌腱內部氣壓為恒定值,通過拉伸氣缸逐漸向肌腱加載,到達極限拉力點附近時,再逐漸卸載,實驗結果如圖4中淺色標記點所示。由于拉伸氣缸內部摩擦力的影響,在每次恒壓實驗中,無法測得在該氣壓下氣動肌腱極限收縮率處的數據;但是由于氣缸內部的摩擦力很小(約為15 N),對實驗結果影響可以忽略不計。
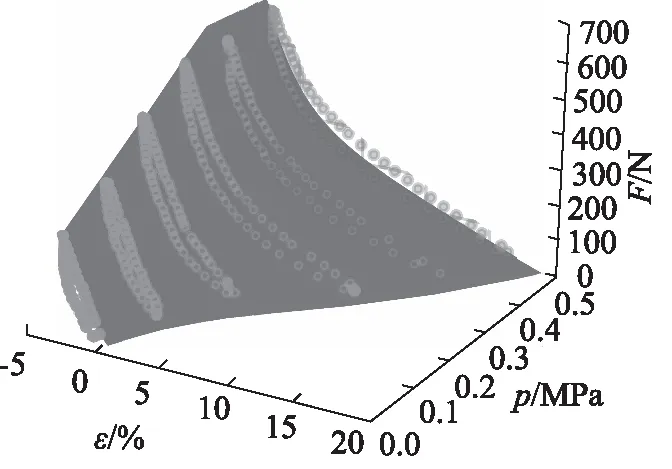
圖4 實驗數據點與擬合結果
根據實驗數據及式(8),參數辨識結果為:
(9)
所以建立的單根氣動肌腱數學模型為:
F(p,ε)=(776.1p-95.9)-100(18.4p+
5.9)ε+(27.3p+110.4)e-40ε
(10)
實驗數據與擬合結果的相對關系如圖4所示,其中淺色標記點為實驗采集數據,深色曲面為通過最小二乘法建立的數學模型。
為了檢驗模型的準確性,將通過最小二乘擬合的近似模型與產品公布的力/位移量圖表[18]作對比(如圖5所示),在每個恒定輸入氣壓下,通過最小二乘法建立的模型與官方公布曲線有較高的重合度,表明該數學模型滿足控制要求。
3 拮抗式仿生關節數學模型
3.1 關節運動學與動力學
圖2b中垂直關節轉軸平面內,由氣動肌腱提供的拉伸力產生關節扭矩驅動關節轉動。根據單根氣動肌腱數學模型(式(1)),假設腱繩處于張緊狀態,對關節進行受力分析,由此得到關節輸出力矩:
τ=F(p1,ε1)r-F(p2,ε2)r
(11)
式中,τ—— 關節輸出力矩
p1,p2—— 2個氣動肌腱的輸入氣壓
r—— 有效關節半徑
ε1,ε2—— 2個氣動肌腱的收縮率,并且滿足:
(12)
如圖5所示,當氣動肌腱的輸入壓力為定值且拉伸力為F=0時,氣動肌腱存在最大收縮率。所以,當關節角度一定時,即使氣動肌腱內存在氣壓,此時腱繩可能依然處于松弛狀態,此時氣動肌腱作用在關節的力F=0。由于建立的數學模型為剛性連接,但腱繩為柔性,在腱繩松弛時數學模型與裝置實際狀態不符,所以判斷腱繩的狀態對于提高關節數學模型的準確性十分重要。
定義氣動肌腱在空載時輸入壓力p的收縮率為ε0(p),所以ε0(p)是當氣動肌腱輸入壓力為p時方程(式(13))的解:
F(p,ε)=0
(13)
對于仿生關節的2根氣動肌腱,可得如下結論:
(14)
其中,Fi為第i根氣動肌腱作用于關節轉軸上的拉伸力。定義函數:
(15)
綜合式(11)~式(15),氣動肌腱仿生關節的關節輸出力矩模型可改進為:
(16)
3.2 建立關節剛度模型
由于氣動肌腱拮抗關節為可變剛度關節,根據關節剛度的定義[11]:

(17)
根據鏈式求導法則,關節剛度K可寫為:
(18)
根據式(1)可推導:
(19)
其中i=1,2,由式(12)可知:
(20)
綜合式(18)~式(20)可得關節剛度模型為:


(21)
3.3 建立關節位置/剛度解算模型
氣動肌腱拮抗關節的關節運動是2根拮抗氣動肌腱運動的合成,可以描述為系統通過2個自由變量控制1個自由度運動,構成了冗余驅動系統,因而該系統可以同時控制關節位置與關節剛度。由于關節位置與剛度模型具有耦合關系,因此要實現關節位置和關節剛度同步控制,引入建立位置/剛度解算模型的思想[14],根據關節位置θ、設定關節剛度K及關節輸出力矩τ解算氣動肌腱理論輸入壓力p1,p2。
根據式(16)、式(21),建立位置/剛度解算模型為:
(22)
但是由于模型中引入了函數g(x),解算難度較大,并且當腱繩處于松弛狀態下,會造成該模型有無數解。為降低解算難度,保證位置/剛度解算模型有唯一解,必須保證腱繩始終處于張緊狀態。假設腱繩處于張緊狀態下,則位置/剛度解算模型可以簡化為:
(23)
但是關節位置θ、關節剛度K及關節輸出力矩τ之間函數關系復雜且具有耦合性,要保證在某一關節位置下腱繩處于張緊狀態,需合理選取關節剛度K的值及關節輸出力矩τ的范圍。
首先計算該關節的位置范圍和剛度范圍。由于氣動肌腱的最小收縮率為-3%,以及預留腱繩長度為lb,所以理論關節運動范圍為:
=[-0.8 rad, 0.8 rad]
=[-45.84°, 45.84°]
(24)
其關節的整體運動范圍與人手MP關節相似。為避免因過度拉伸導致氣動肌腱損壞,取運動范圍:
θ∈[-20°, 20°]=[-0.349 rad, 0.349 rad]
(25)

F(p,εi)=0
(26)
根據式(13),可求得在關節角度θ=0時,腱繩恰好處于直線狀態且拉伸力Fi=0時的輸入氣壓:
(27)
在此狀態下,該關節剛度取得最小值Kmin=6.03 N·m/rad。當pi(θ)=pmax且關節位置位于極限位置(θ=±0.349 rad)時,關節剛度取得最大值Kmax=11.79 N·m/rad。
在保證腱繩處于張緊狀態的前提下,給定關節角度θ和關節剛度K,合理增大p1的值,減小p2的值,可增大關節輸出力矩;反之合理減小p1的值,增大p2的值,可減小關節輸出力矩。依照此規律,如圖6所示的算法流程圖可以計算出腱繩處于張緊狀態且給定關節角度θ和關節剛度K的條件下,氣動肌腱拮抗仿生關節可輸出最大關節輸出力矩τmax和最小關節輸出力矩τmin(計算最大力矩τmax時,i=1,j=2;計算最小力矩τmin時,i=2,j=1)。
圖6 求取關節力矩最值算法流程圖
因此,根據此算法流程圖,計算出在關節位置范圍及關節剛度范圍內的關節輸出力矩最大值與最小值,如圖7所示。其中有顏色覆蓋的區域代表在此關節角度θ和設定關節剛度K存在最大輸出力矩τmax和最小輸出力矩τmin,并且由顏色覆蓋的形狀相同,說明輸出力矩的最大值與最小值總是成對存在。例如,當關節位置θ=0°,關節剛度K=8 N·m/rad時,最大輸出力矩Tmax=2.507 N·m,最小輸出力矩Tmin=-2.507 N·m。
圖7 關節輸出力矩最值分布圖
圖中的白色區域代表在此關節角度和設定關節剛度下不存在輸出力矩的最值,進而說明了在保證腱繩處于張緊狀態的前提下,在氣動肌腱許用輸入壓力范圍內,在該關節位置無法達到所設定的剛度值。所以在某一關節位置θ,應合理選擇關節剛度值,再根據關節輸出力矩的范圍選擇合理的輸出力矩,使腱繩始終處于張緊狀態,進而保證位置/剛度解算模型具有唯一解。
4 拮抗式仿生關節位置/剛度控制
4.1 試驗平臺和模糊PID控制器設計
以圖2所示的氣動肌腱拮抗式仿生關節為被控對象,基于Python編程語言編制實時控制程序,控制系統試驗平臺如圖8所示,試驗系統硬件配置如表2所示。
圖8 仿生關節控制系統試驗平臺
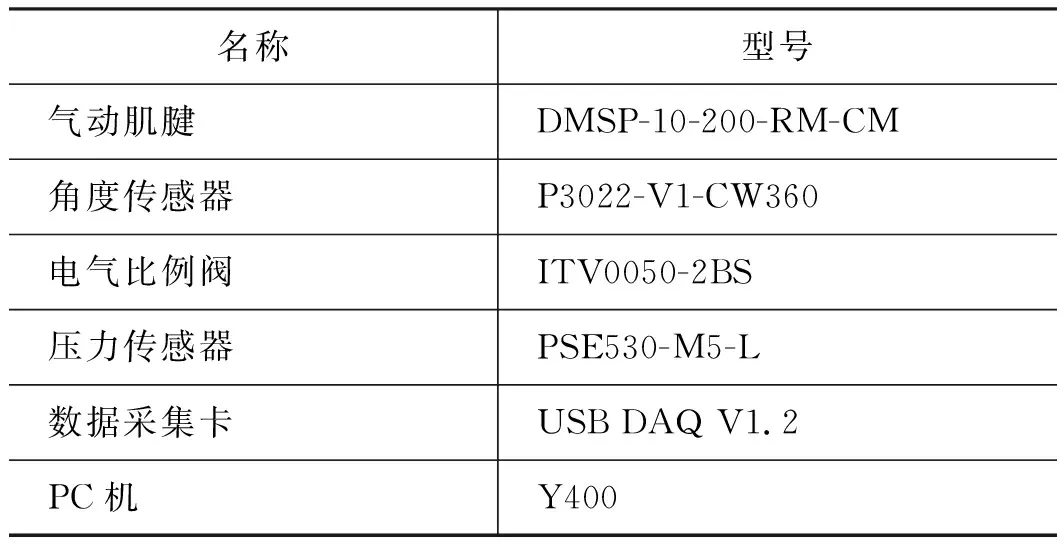
表2 試驗硬件配置
傳統PID控制方法雖然能使系統獲得良好的穩態精度,但系統的快速性和抗干擾能力都不理想。模糊控制是基于模糊推理和模仿人的思維方法,其主要的特點是控制系統設計依據經驗和操作數據。本研究中將模糊控制和傳統PID算法相結合,使控制器具有模糊控制的魯棒性和PID控制削弱穩態誤差的性能。氣動肌腱仿生關節控制系統原理如圖9所示,其中模糊PID算法中的模糊控制器以誤差e和誤差變化率ec為輸入,以kp,ki,kd為輸出,運用模糊控制規則[19]實現對PID參數的自動調節。PID控制器采用增量式PID算法,輸出為關節控制力矩u,其表達式為:
u(i)=u(i-1)+kp[e(i)-e(i-1)]+kie(i)+
kd[e(i)-2e(i-1)+e(i-2)]
(28)
式中,i為控制次數。
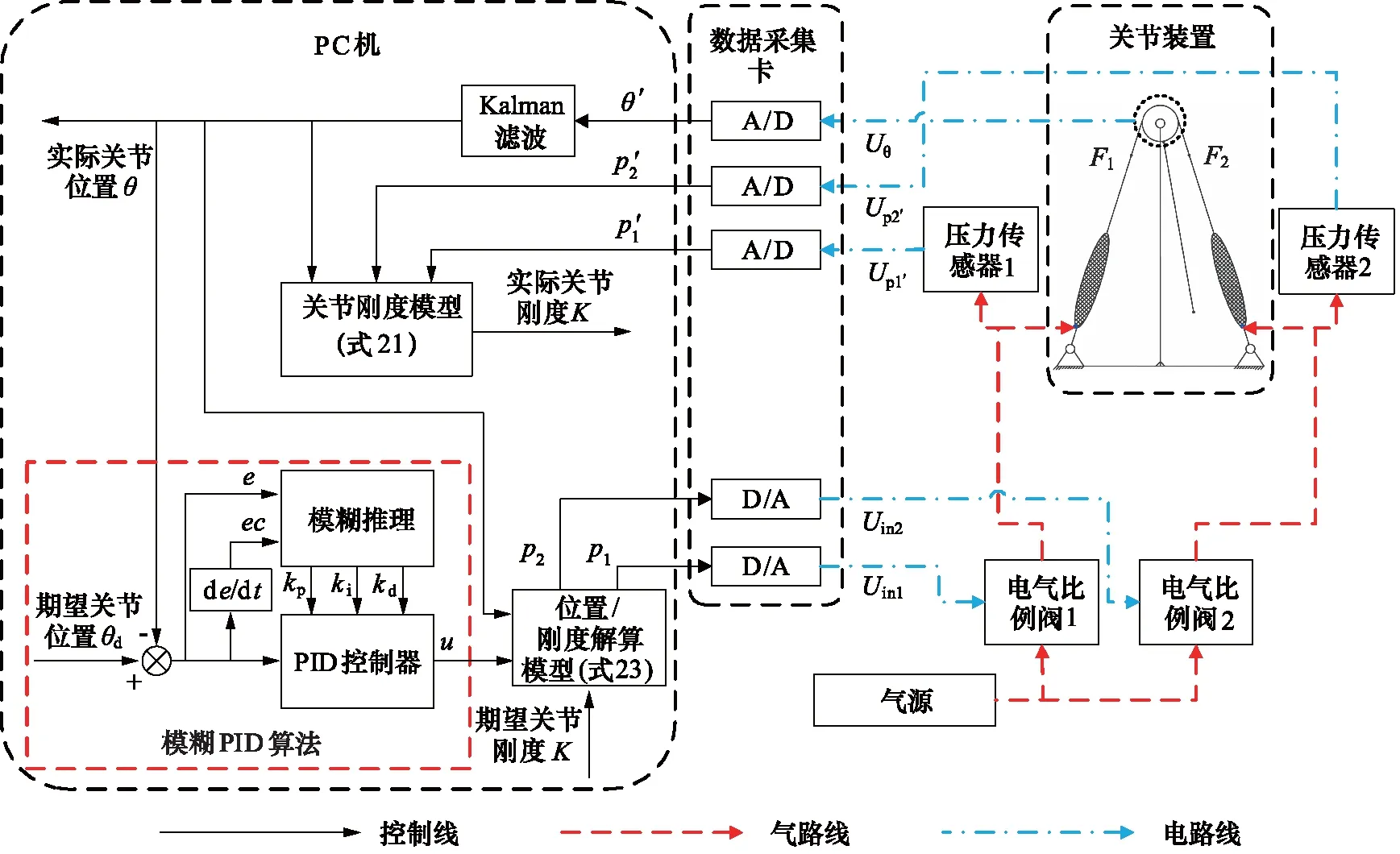
圖9 關節控制系統原理圖
4.2 試驗與結果分析
通過試驗驗證基于模糊PID算法對氣動肌腱拮抗式仿生關節控制的有效性。實驗中分別采用模糊PID算法和傳統PID算法對該仿生關節進行位置/剛度控制。實驗中的傳統PID控制器的參數為通過不斷調整所確定的較優的控制參數。為了比較模糊PID算法與傳統PID算法的控制精度,限定模糊PID算法的控制參數以傳統PID算法參數為中心,等距離范圍內波動。實驗中采樣頻率與控制頻率均為100 Hz,控制關節在恒定剛度和階梯剛度下,跟蹤正弦軌跡θd(°)
θd=10 sin(0.2πt)
(29)
所有試驗過程中,根據圖7選擇合理的關節剛度和限制關節控制扭矩的范圍,保證腱繩處于張緊狀態。實驗結果分別如圖10~圖11所示。其中,每組圖a表示分別采用模糊PID算法與PID算法控制關節跟蹤軌跡的試驗結果;圖b表示8~12 s的局部放大圖;圖c表示分別采用模糊PID算法與PID算法跟蹤關節剛度試驗結果;圖d表示試驗過程中模糊PID算法與PID算法的控制參數的變化。
為了量化2種控制方法的位置控制精度以及分析關節剛度動態響應,定義平均跟蹤誤差為:
(30)
其中,N為數據總數。從關節位置平均誤差、關節位置最大誤差、關節剛度平均誤差3個方面比較模糊PID算法和傳統PID算法對該關節的控制效果,計算結果如表3所示。
根據圖10~圖11和表3結果分析如下:
(1) 在關節位置跟蹤效果上,模糊PID算法的位置跟蹤效果明顯優于傳統PID算法,在階梯剛度正弦軌跡實驗中,位置平均誤差由1.669°減小為1.093°,最大位置誤差由3.225°減小至2.158°;在2種控制方法中,采用恒剛度和階梯剛度跟蹤正弦軌跡時,恒剛度下關節位置跟蹤效果較優; 由于階梯剛度的剛度值突變,在剛度突變處關節產生抖動,進而造成比恒剛度跟蹤正弦軌跡更大的位置誤差;
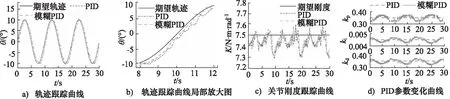
圖10 恒剛度下跟蹤正弦軌跡試驗結果
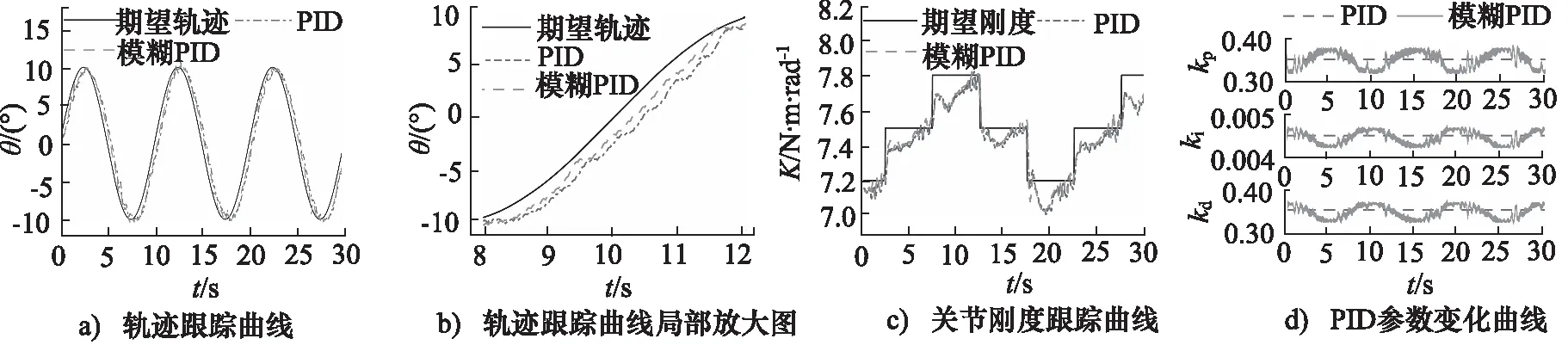
圖11 階梯剛度下跟蹤正弦軌跡試驗結果

表3 關節位置與剛度跟蹤誤差
(2) 在關節剛度跟蹤效果上,模糊PID算法相比于傳統PID算法沒有明顯的提高,2種方法均能較好的跟蹤關節剛度,在階梯剛度正弦軌跡試驗中剛度平均誤差由0.170 N·m/rad提升至0.166 N·m/rad,其精度均在0.2 N·m/rad內。由于關節剛度為開環控制,所以剛度跟蹤存在誤差,并且剛度值隨著關節位置的變化產生一定的波動。
5 結論
(1) 在分析人手關節骨骼肌肉結構和肌肉發力的基礎上,設計了一種基于氣動肌腱驅動、腱傳動的拮抗式仿生關節;
(2) 建立了單根氣動肌腱數學模型。通過搭建實驗平臺對氣動肌腱進行性能測試,對現有的最小二乘法擬合建立氣動肌腱模型的方法進行改進,建立了單根氣動肌腱數學模型,并與產品公布的力/位移量圖表作對比,驗證了模型的準確性;
(3) 建立拮抗式仿生關節動力學模型,關節剛度模型和位置/剛度解算模型。為保證腱繩在運動過程中始終保持張緊狀態,進而保證位置/剛度解算模型具有唯一解,確定了關節位置范圍和關節剛度范圍內的關節輸出力矩的界限;
(4) 利用位置/剛度解算模型,采用模糊PID算法和傳統PID算法實現對該關節位置閉環控制、關節剛度開環控制。實驗研究結果表明,2種方法在關節剛度控制精度方面基本相同,模糊PID算法在關節位置方面具有更高的控制精度。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
