基于FPGA的直流電機控制設計
2020-08-21 09:09:32周柳娜
數字技術與應用 2020年7期
周柳娜
摘要:本文的特點在于在FPGA平臺完成對霍爾傳感器輸出的脈沖信號進行采集、處理,實現無刷直流電機的轉子轉速計算,同時結合使用直流電機功率驅動模塊,共同完成對小型直流電動機的速度測量與控制[1]。以FPGA為開發平臺,PID算法實現嵌入FPGA內部,可以保證整個測量與控制系統可定制化、開發周期短、靈活性更高。
關鍵詞:FPGA;直流電機;PID
中圖分類號:TM33 文獻標識碼:A 文章編號:1007-9416(2020)07-0125-02
1 背景意義
直流電機良好的啟動性和靈活的調速特性,在國民經濟發展過程中起著不可替代的作用。隨著直流電動機應用場景的復雜化,功能單一的直流電動機測速與控制系統已不能滿足實際需求,為適應各行業發展,設計一款可以迅速完成電機加/減等復雜控制功能的直流電機測速與控制系統勢在必行。
2 系統總體設計分析
系統包含多個功能模塊,各個功能模塊間存在控制信息和數據信息的交換,設計中控制信息由各模塊的端口進行交換,而數據信息的交換本設計主要采用的是異步串口通信方式[2]。
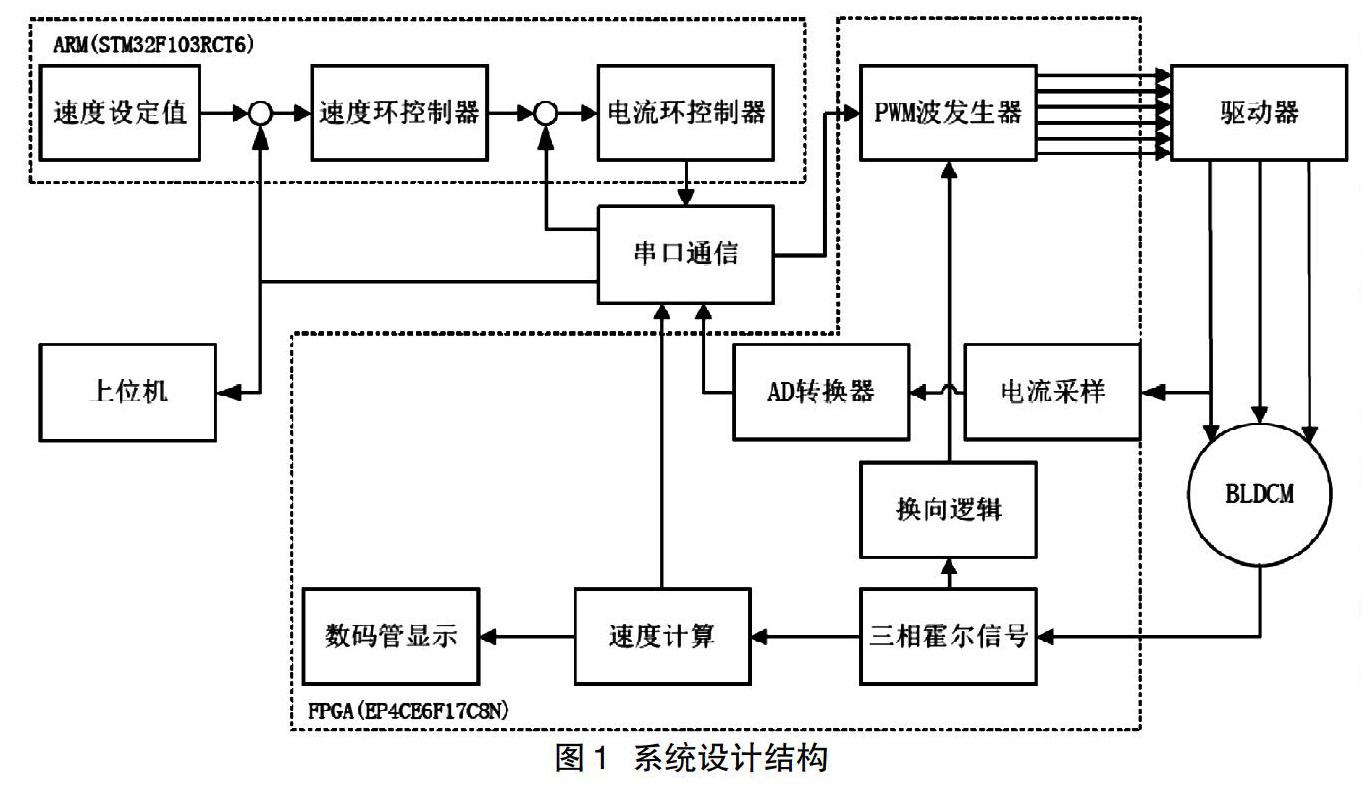
如圖1系統設計結構無刷直流電機控制系統主要由兩部分組成,包括有ARM(STM32F103RCT6)為核心的算法模塊、FPGA(EP4CE6F17C8N)為核心控制模塊,兩個模塊間采用串口通信進行信息交換。ARM核的算法模塊中主要由速度環控制器、電流環控制器組成,控制器中分別編寫了模糊PID、傳統PID算法,實現本系統雙閉環結構,閉環輸入為FPGA串口發送的當前轉速,輸出為調節后的PWM占空比數值[3]。FPGA核的控制模塊主要由前端獲取三相霍爾信號,一路根據換邏輯設置驅動板中功率管導通順序實現換相,另一路由FPGA進行速度檢測與計算,計算值分別通過串口發送給ARM核以及在數碼管中顯示當前轉速;另外A/D轉換器轉換當前電流值,數據經串口發送給ARM核算法模塊;算法模塊的輸出量由串口通信上傳給FPGA,FPGA根據占空比數值調節驅動板中六路PWM波,實現固定頻率下不同占空比調節轉速。最后整個過程中串口通信的數據信息都可上傳給電腦的上位機,實現實時監控[4]。
3 硬件電路總體架構設計
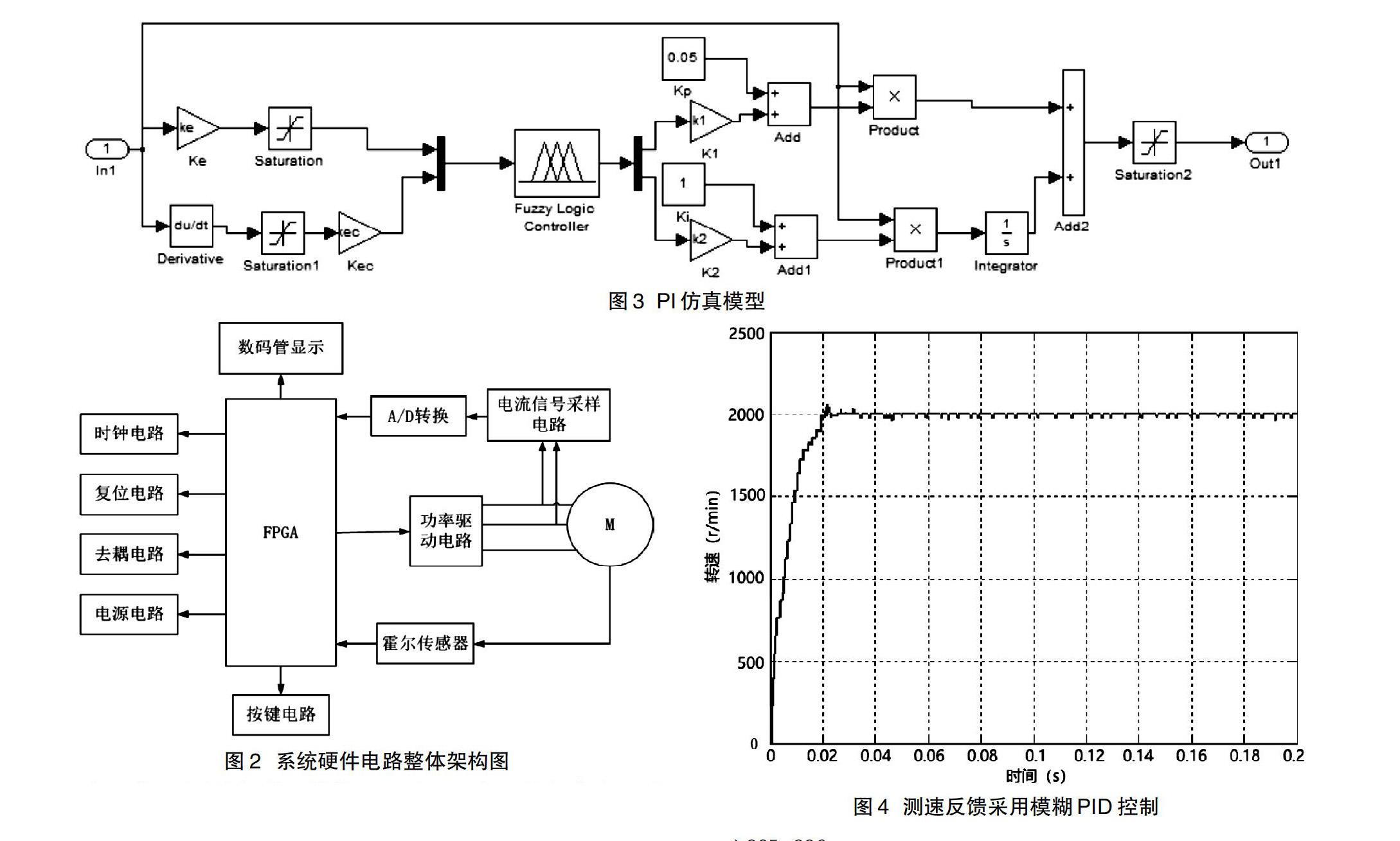
系統的整體硬件框架如圖2所示。為使系統可以正常運行,除要構建一個完整的FPGA的最小系統(系統電源、FPGA時鐘、系統復位電路等)外,還有功率驅動電路、A/D轉換電路、電流信號采樣回路、電平轉換電路、霍爾傳感器電路。本設計采用雙閉環結構,能夠有效改善直流電機的動態響應時間與穩態誤差。
4 控制算法
本設計采用電流PID與測速模糊PI的雙閉環反饋機構, 模糊PID適用于在一些復雜的工業控制中進行準確的控制[5]。模糊PID的參數是利用自己設定的經驗規則改變控制參數以此對干擾進行自適應,本質上這是一個自學習的過程。如圖3 PI仿真模型所示電機額定轉速3000rpm,以本課題為例電機轉速偏差實際值范圍為[-1000,1000],偏差變化率范圍為[-300,300],模糊子集e、ec的論域為(-3,3),因而量化因子Ke為0.003,Kec為0.01。
5 調試結果
通過人工經驗法整定電流閉環反饋的參數[6],調整后的PID參數為Kp=10.012、Ki=4.051、Kd=1.115。以設定轉速2000rpm為例,得圖4所示。
參考文獻
[1] BowesS.R.,LiJ..New robust adaptive control algorithm for high performance acdrives[J].IEEE Trans.Ind.Electron,Apr,2000(47):325-336.
[2] LeeD.C.,LeeG.M..A novel overmodulation technique for space-vector PWMinverters[J].IEEE Trans.on Power Elect.,1998,13(6):1144-1151.
[3] 劉麗娜.基于FPGA的無刷直流電機測速與控制系統的設計[D].哈爾濱:哈爾濱工程大學,2012.
[4] 張章譚.直流電動機在整流電源下供電的幾個主要問題[J].冶金動力,2003,97(3):4-7.
[5] Joachim Holtz,LotzkatW.,Khambadkone A M..On continuous control of PWMinverters in the overmodulation range including the six-step mode[J].IEEE Trans.OnInd.Elect.,1993,8(4):546-553.
[6] 丁仕燕,韓江,朱方洲.開放式數控系統軟件平臺的研究[J].機械與電子,2002(2):35-38.
