基于單片機控制的智能螺旋丸設計
2020-08-21 09:09:32李曉帥郝潤生楊海祺孟沖
數字技術與應用 2020年7期
李曉帥 郝潤生 楊海祺 孟沖

摘要:針對目前動漫產業中Cosplay裝備做工和還原度偏低的問題,設計了一種基于單片機控制的螺旋丸裝置。系統以STC89C52單片機作為核心控制器,通過超聲波傳感器檢測手勢的距離,單片機根據距離的大小,輸出占空比變化的PWM波,通過L293D控制直流電機驅動一個球體中的旋轉結構以變化的速度進行旋轉,同時調節LED燈光的亮度。旋轉體則由兩個相互垂直且有一定差速的旋轉軸并內嵌有數個LED及光導纖維組成。通過旋轉變化,能再現人氣動漫中火影忍者“螺旋丸”的效果。
關鍵詞:Cosplay;螺旋丸;超聲波傳感器
中圖分類號:TP393 文獻標識碼:A 文章編號:1007-9416(2020)07-0010-03
0 引言
Cosplay(Costume play)是指利用服裝、飾品、道具和化妝等手段來扮演動漫、游戲中人物角色的一種表演藝術行為[1],作為一種新的文化領域頗受年輕人的喜愛。在動漫產業蓬勃發展的背景下,動漫產業的衍生產業—Cosplay產業快速發展。在很多動漫展會、同人展會、Cosplay舞臺劇中,都會用到Cosplay道具。但國內市場上Cosplay道具的做工和還原度普遍偏低,缺乏技術和創新。設計一款還原度高、視覺效果好的Cosplay道具成為市場的迫切需求。
螺旋丸是動漫《火影忍者》中最重要的也是最為常見的忍術之一,作為主角旋渦鳴人最常使用的忍術,螺旋丸也有很多種形態的變化。借鑒該動漫中的螺旋丸效果,本文設計了一種基于單片機控制的智能“螺旋丸”。其主要功能如下:由單片機控制一個直流電機驅動旋轉機械機構運行,旋轉機械機構則帶動球體內的數十個發光單元同時旋轉,利用人眼的視覺暫留原理,旋轉過程會產生數十條動態螺旋線,構成一個螺旋發光球體。它可以根據手勢的遠近自動調節旋轉的速度和發光的亮度,形成不同的旋轉變化,最大程度地再現了動漫中的螺旋丸效果。
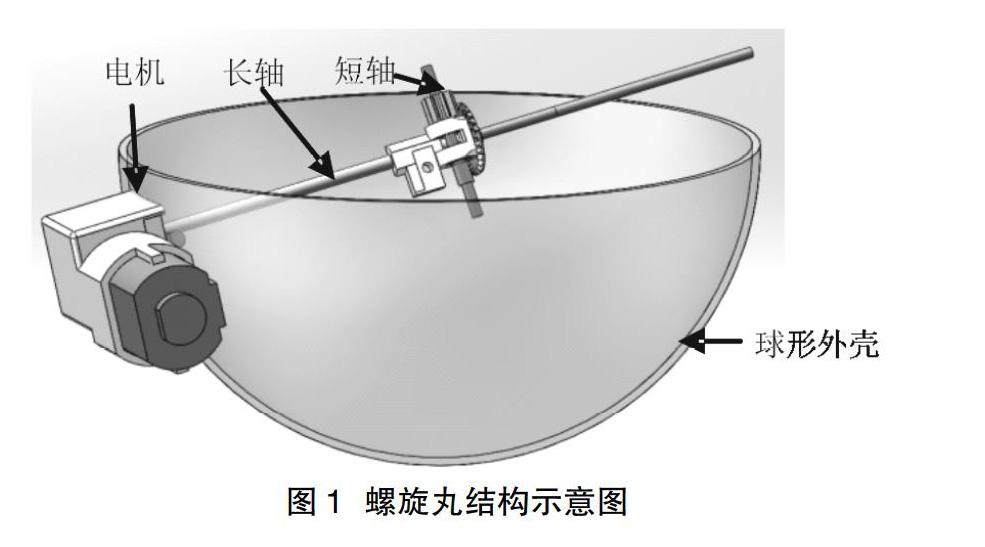
1 螺旋丸結構設計
螺旋丸的外形是一個透明球體,其結構示意圖如圖1所示。在球形外殼的內部,分別設置有相互垂直的一個長軸和一個短軸,長軸的一端延伸至球形外殼外與一個直流電機相連,另一端通過連接件與短軸固定連接,短軸的兩端分別固定連接有發光單元。發光單元由若干個發光二極管和光導纖維組成,每個發光二極管的頭部與光導纖維連接。當發光二極管點亮時,照射光導纖維的一端,實現光導纖維的另一端發光。
長軸和短軸上都安裝有齒輪,通過齒輪的嚙合,長軸將電機的旋轉傳動給短軸,短軸帶動發光單元旋轉發光。齒輪傳動示意圖如圖2所示。
2 控制系統硬件設計
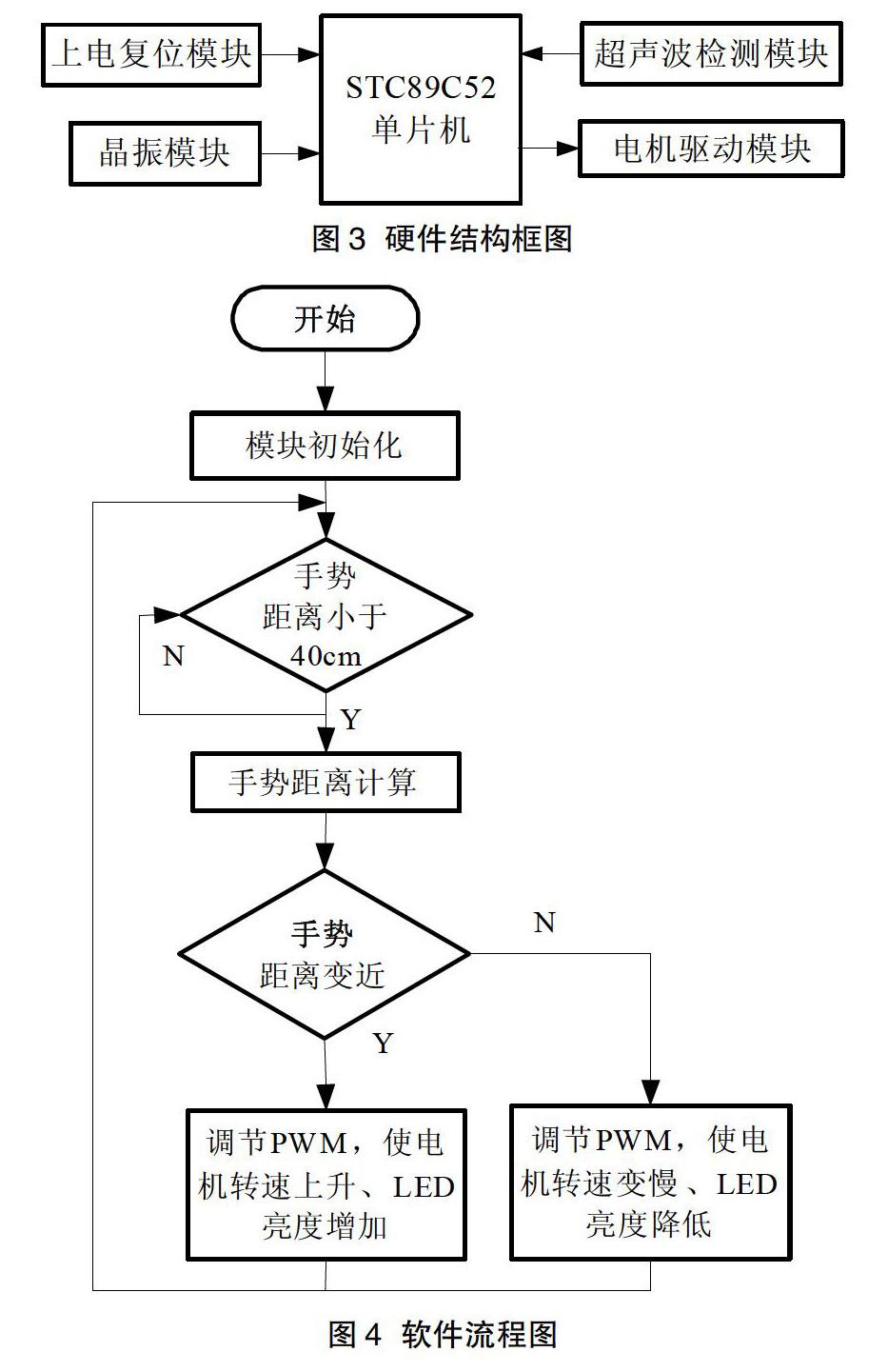
本設計以STC89C52單片機作為螺旋丸的控制器,其硬件結構框圖如圖3所示,包括四個模塊,上電復位模塊、晶振模塊、超聲波檢測模塊、電機驅動模塊等組成。超聲波檢測模塊將檢測的手勢距離傳送給單片機,單片機根據距離的大小產生PWM波,分別對電機驅動模塊和燈光控制模塊發出控制信號,調節電機的轉速和燈光的亮度,進而形成旋轉變化的螺旋丸效果。
2.1 單片機控制電路
單片機控制電路由STC89C52單片機、晶振電路、上電復位電路、電源電路等組成[2]。STC89C52單片機是整個設計的控制核心。它具有低功耗、高性能等特點,其運行速度相對來說中等,但足以滿足需求。該控制器更適合開發試驗,性價比高,并且與MCS-51完全兼容。
2.2 超聲波檢測模塊
通過超聲波檢測模塊檢測手勢的距離,并根據距離的大小控制電機的轉速、調節LED光的亮度,進而獲得不同旋轉變化的燈光效果。與激光測距、微波測距相比,超聲波測量距離技術成本低、比較容易實現、結構也相對簡單。
超聲波模塊選用HC-SR04[2],它可提供2~400cm的測量范圍。模塊由超聲波發射器、超聲波接收器及控制電路三部分組成。超聲波測距就是利用其反射特性,超聲波的發射是通過工作頻率為40kHz的多諧振蕩器電路實現的。測量時,單片機控制超聲波發生器發射超聲波,超聲波傳播后遇到障礙物反射回反射波;接收傳感器將接收到的反射波信號通過壓電轉換方式轉換成電信號,電信號經放大電路放大以及濾波電路處理后,轉換成方波信號,方波信號再經單片機處理后得到測量的距離。
HC-SR04共有4個引腳,分別為VCC、GND、TRIG和ECHO。在設計中,I/O口P2.1接TRIG引腳,P2.0接ECHO引腳。
2.3 電機驅動模塊
螺旋丸的旋轉部分采用直流電機驅動。直流電機具有很多優點,不僅調速性能好、范圍廣,而且操作方便,可以承受持續的沖擊,能達到快速啟動、制動的目的。驅動芯片采用L293D,它屬于H橋集成電路,連續輸出電流0.6A,最高工作電壓36V,可以驅動感性負載。L293D的輸入端可以與單片機直接相連,當驅動小型直流電機時,可以直接控制兩路電機。
由于螺旋丸只有一個直流電機,所以在設計中,只使用了L293D驅動芯片的一組輸入/輸出。單片機I/O口的P1.2連接IN1,P1.2引腳輸出PWM波,P1.4接EN1,OUT1和GND分別接直流電機兩端。
3 控制系統軟件設計
軟件設計主要包括超聲波檢測模塊是否檢測到手勢進入控制范圍(根據動漫中道具的使用特點,設定距離為40cm)、對手勢的距離進行測量、輸出PWM波控制電機的旋轉速度和LED的發光亮度。
軟件設計流程如圖4所示。
當程序初始化后,先調用手勢檢測子程序,由超聲波模塊檢測手勢的距離,根據手勢的距離通過輸出PWM波來調節電機的轉速和LED燈光的亮度。如果手勢距離小于40cm,且距離是由遠及近,則增加PWM的占空比,控制節電機的轉速上升和LED燈光的亮度增加。反之,距離是由近及遠,則減小PWM的占空比,控制節電機的轉速下降和降低LED燈光的亮度。
通過脈寬寬度調制(PWM)方式,控制直流電機調速和LED燈光的亮度。采用此方法控制直流電機調速可以減少熱損耗,提高系統穩定性,實現智能化的數字控制,降低成本。采用脈沖寬度調制(PWM)方式控制燈光的亮度。PWM調光的工作原理則是利用脈寬調制信號反復開關LED,進而調節LED的平均電流[3]。
4 結論
本文設計了一種基于單片機控制的旋轉發光裝置,設計了機械結構和控制系統。該裝置由直流電機驅動一個旋轉機構帶動若干發光單元旋轉發光,其中部分連接件采用3D打印技術完成。它能夠根據手勢的距離,自動啟動、停止以及調節旋轉的速度和發光單元的亮度。該裝置在旋轉過程會產生數十條動態螺旋線,構成一個螺旋發光球體,呈現了人氣動漫《火影忍者》中螺旋丸的效果。如果在此基礎上增加藍牙模塊或WiFi模塊[4],則能夠實現更加智能化的控制。
參考文獻
[1] 陳怡遲.我國Cosplay產業發展現狀[J].現代商貿工業,2020(5):16-17.
[2] 王寧,王巍,牛萍娟.手勢控制的LED變形燈設計[J].現代電子技術,2020,43(2):24-28.
[3] 孟卓.基于HC-SR04的超聲波導盲系統設計[J].電子設計工程,2019,27(21):136-139.
[4] 陳炳飛,周朝霞,邱義,等.亮度自適應的智能臺燈設計[J].物聯網技術,2018(7):98-101.
