基于西門子S7-200SMART的SINAMICSV90位置控制應用
2020-08-21 09:09:32翟靂
數字技術與應用 2020年7期
翟靂
摘要:為了探究如何更方便、準確地實現位置控制,確保其位置控制的精度, 本文探討了基于西門子S7-200 SMART系列PLC和SINAMICS V90伺服系統的位置控制方法。通過介紹系統軟硬件構成及其特點,詳細論述了PLC系統通過外部脈沖位置控制模式控制伺服電機,以實現相對運動的過程。
關鍵詞:S7-200 SMART;SINAMICS V90;位置控制
中圖分類號:TP273 文獻標識碼:A 文章編號:1007-9416(2020)07-0001-02
隨著自動化水平的不斷提高,越來越多的工業控制場合需要精確的位置控制。因此,如何更方便、更準確地實現位置控制是工業控制領域內的一個重要問題。位置控制的精確性主要取決于伺服驅動器和運動控制器的精度。
1 SINAMICS V90伺服驅動簡介
西門子SINAMICS V90是2013年推出的小型、高效便捷的標準運動控制伺服驅動系統,配合使用SIMOTICS S-1FL6伺服電機。
SINAMICS V90伺服驅動支持九種控制模式,包括四種基本控制模式(外部脈沖位置控制模式、內部設定值位置控制模式、速度控制模式、轉矩控制模式)和五種復合控制模式。
2 西門子S7-200 SMART實現對SINAMICS V90的位置控制方法
2.1 主要設備
西門子S7-200 SMART ST20型PLC,SINAMICS V90伺服驅動器,SIMOTICS S-1FL6伺服電機。
2.2 系統構成
SINAMICS V90伺服驅動器與PLC連接起來,Q0.1與PTIA_24P相連,Q0.2與PTIB_24P相連,Q0.4與EMGS相連,Q0.5與SON相連,Q0.6與RESET相連,SINAMICS V90伺服驅動器與SIMOTICS S-1FL6伺服電機連接。
2.3 控制程序的設計要求
現對上述系統提出控制要求:伺服電動機驅動滾珠絲桿,滾珠絲桿螺距為6mm,機械減速比為1,脈沖當量為1um/p,伺服電機帶增量編碼器分辨率為10000。當手自動轉換開關SA1打到左邊,執行手動模式。手動模式下,按住按鈕SB1,電機以100r/min正轉,按住按鈕SB2,電機以200r/min反轉。
2.4 SINAMICS V90伺服驅動器參數設置
P29003設置為0,P29014設置為1,P29010設置為0,P29011設置為0,P29012[0]設置為5,P29013設置為3,P2544設置為40,P2546設置為1000,P29301[0]設置為1,P29302[0]設置為2,P29300為6。
2.5 控制程序
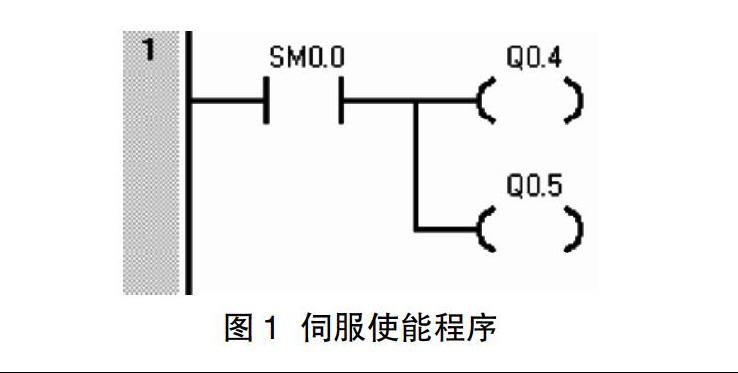
2.5.1 伺服使能解析
如圖1所示,網絡1是使用Always_On特殊存儲器SM0.0,該位始終為1,接通急停信號(Q0.4)和伺服開啟信號(Q0.5),使伺服驅動器正常開啟。
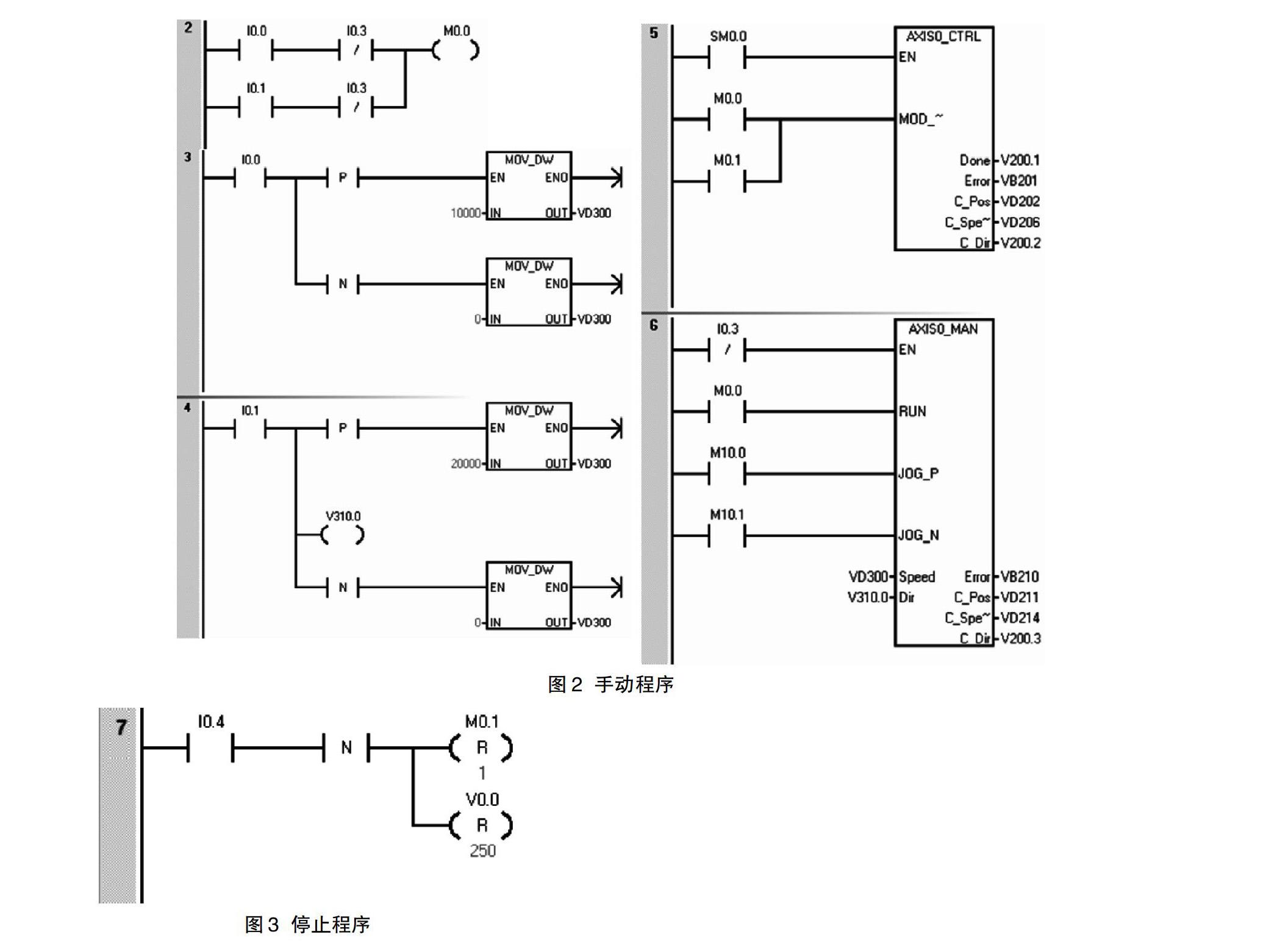
2.5.2 手動部分解析
如圖2所示,網絡2將手動自動轉換開關打到手動狀態(I0.3=0),按下點動正轉信號(I0.0=1)和點動反轉信號(I0.1=1)都驅動點動標志位M0.0。
網絡3含義是按下點動正轉信號(I0.0=1),將10000傳輸給VD300,即電機速度為100r/min,V310.0=0則代表正轉,電機以100r/min正轉。松開點動正轉信號(I0.0=0),將0傳輸給VD300,即電機速度為0r/min,電機停轉。
網絡4含義是按下點動反轉信號(I0.1=1),將20000傳輸給VD300,即電機速度為200r/min,V310.0=1則代表反轉,電機以200r/min反轉。松開點動反轉信號(I0.1=0),將0傳輸給VD300,即電機速度為0r/min,電機停轉。
網絡5是AXISx_CTRL啟動和初始化運動,使用 SM0.0(始終開啟)作為EN參數的輸入。使用點動標志位M0.0為1或自動標志位M0.1為1,MOD_EN 參數處于開啟狀態。
網絡6 AXISx_MAN 是將運動軸置為手動模式。手動自動轉換開關打到手動狀態(I0.3=0)作為EN參數的輸入。使用點動標志位M0.0啟用RUN(運行/停止)參數,會使運動軸加速至指定的速度Speed 參數(VD300)和方向Dir 參數(V310.0)。
2.5.3 停止解析
如圖3所示,網絡7為按下停止按鈕I0.4,復位M0.1,同時復位V0.0開始的250位。
3 結語
通過調速,程序能實現控制程序要求,能完成西門子S7-200 SMART通過外部脈沖位置控制模式對SINAMICS V90的位置控制,定位精度較高。
猜你喜歡
少先隊活動(2021年4期)2021-07-23 01:46:22
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
攝影之友(影像視覺)(2019年3期)2019-03-30 01:36:50
中國生殖健康(2019年3期)2019-02-01 06:12:26
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
沈陽醫學院學報(2015年1期)2015-12-27 13:44:40
醫學教育管理(2015年3期)2015-12-01 06:43:16
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
中國艦船研究(2014年5期)2014-05-14 06:43:09
