網格化信息管理及模式識別在分布式光纖傳感預警系統的應用
2020-08-20 04:34:46張洪奎
石油工程建設 2020年4期
張洪奎
中國石化銷售華中分公司,湖北武漢 430000
分布式光纖傳感預警系統是基于相位敏感的光時域反射技術(φ-OTDR),通過伴隨管道的通信光纖作為傳感體,利用光纖中后向瑞利散射光干涉,對管道沿線的振動進行實時監測[1-2]。φ-OTDR技術由美國德克薩斯A&M大學的Taylor于1993年首次提出[3],目前廣泛應用于油氣管道安全檢測[4]。2009年,王志強等人報道了分布式光纖溫度檢測技術在氣體管道泄漏檢測中的應用[5],同年朱建新等人報道了基于φ-OTDR光纖管道安全預警系統在油氣管道安全防范中的應用[6]。2015年,任亮等人報道了基于光纖光柵應變傳感器的油氣管道腐蝕監測應用[7]。
武漢—廣水成品油管道應用了分布式光纖傳感預警系統,自2017年12月以來,相繼開發了利用傳感系統實現清管器實時定位、斷纜監測等功能,系統于2018年10月驗收,驗收后在中國石化銷售華中分公司湖北處的推進下全面使用,各站對預警系統的每次報警都進行現場排查和確認,報警確認率接近100%。然而在現場的實際工作中,對于每一條報警信息都需要安排管道工作人員去現場復核,由于很多振動是由農耕、火車或者道路施工等無害振動原因引起的,這就產生了很大的工作量。另一方面,在管道安全預警系統中,存在一定數量的無異常報警,現場復核會造成人力、物力和財力的浪費,為有效降低無異常報警,同時減少對無傷害入侵引起振動的現場復核次數,在光纖預警系統中加入了網格化信息管理數據庫和智能識別功能,同時對無異常報警較多處的振動配置參數進行優化。經實際監測證明有效降低了無異常報警率并提高了報警吻合率。
1 網格化信息管理和信號識別方案
網格化信息管理和信號識別系統設計為三層,見圖1。最底層是網格化信息統計和對振動信號的底層識別算法;中間層是將網格化信息進行組織管理,建立網格化信息庫,同時開發人際交互的工程應用軟件將網格化數據庫和識別算法進行邏輯融合;最高層為應用層,在有振動事件發生時,系統應用軟件對振動事件類型進行判斷,同時將振動點的網格化信息自動推送,事件處置人員將參考推送信息對振動做出判斷并進行相應的處理。
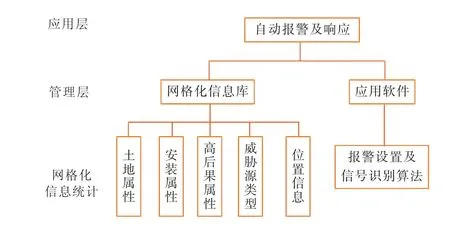
圖1 網格化信息管理和信號識別系統
1.1 網格化信息統計
網格化信息統計是指將輸油管道自身和周邊區域的多維度信息進行統計,建立管道網格狀信息網,在系統出現報警時,將網格化信息推送給處置人員,作為報警處理參考的依據。多維度網格化信息采集內容、參數和技術指標要求見表1。
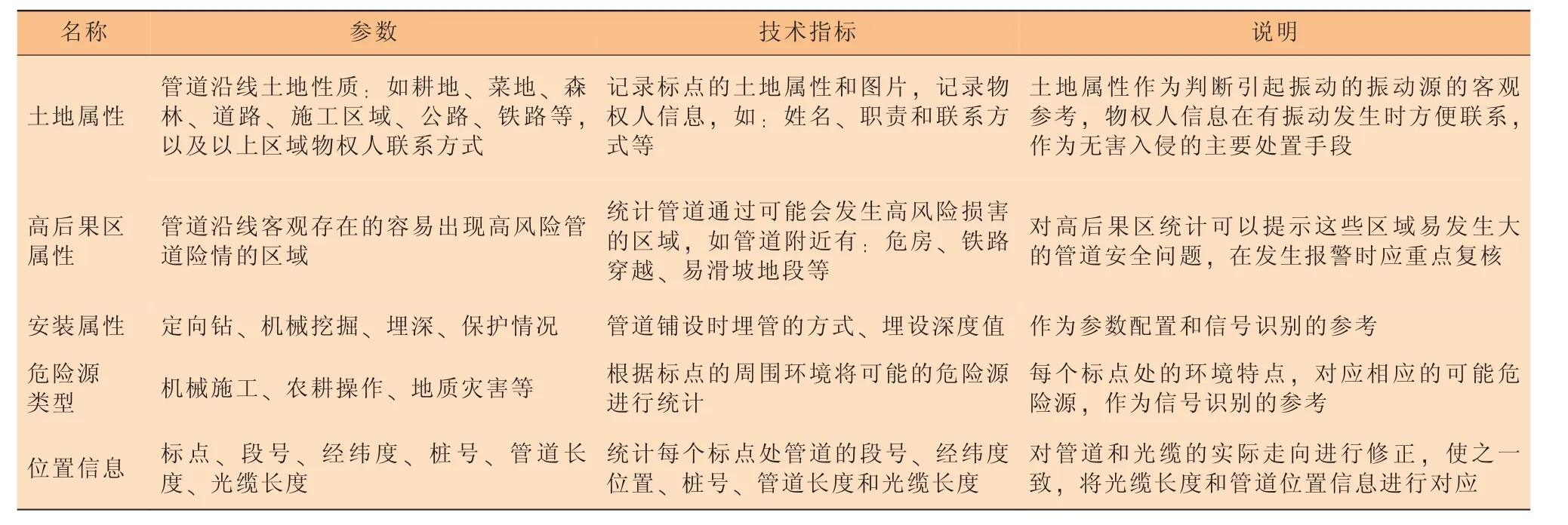
表1 網格化信息統計內容
1.2 網格化數據采集實施方案
1.2.1 軟件配置準備
首先利用軟件將返回的瑞利干涉光在時域上解調,將時域坐標轉化為管道距離坐標。然后對管道距離坐標按照傳感系統最大分辨率進行分段,如在實際應用中,系統最高分辨率為10 m,則管道坐標分為10 m一段,在總長40 km的監測系統中,管道分為4 000段。同時預設置每段的報警參數,如信號累積閾值、報警閾值及靈敏度等。
1.2.2 工程標點
標點是網格化工程實施的核心部分。首先沿管道走向每隔50~100 m進行管道走向標點。標點過程為在沿管道每個樁點處進行敲擊,當振動信號強度超過累積閾值時,信號強度開始累積疊加,當疊加值超過設定報警閾值時,系統報警,此時軟件將顯示報警段數,將此樁號的段數、樁號、經緯度、報警閾值設置、周圍環境等網格化信息進行統計,輸入Excel表格,同時也將敲擊點環境照片留存。
除標點獲取的現場信息外,系統還增加了施工管道沿線的地圖信息,可將報警點位置標在地圖上,現場處置人員可更加準確和迅速地到達現場。
1.2.3 信息上傳
將網格化信息的Excel表格、地圖信息及其他的網格化信息上傳到軟件。此時可通過軟件調取地圖查看管道走向和對應樁號,見圖2。當有入侵振動并引起報警時,軟件自動彈出報警框,見圖3。報警框包含振動點網格化信息,能夠快速及時將振動點位置、振動類型和現場信息反饋給工作人員。
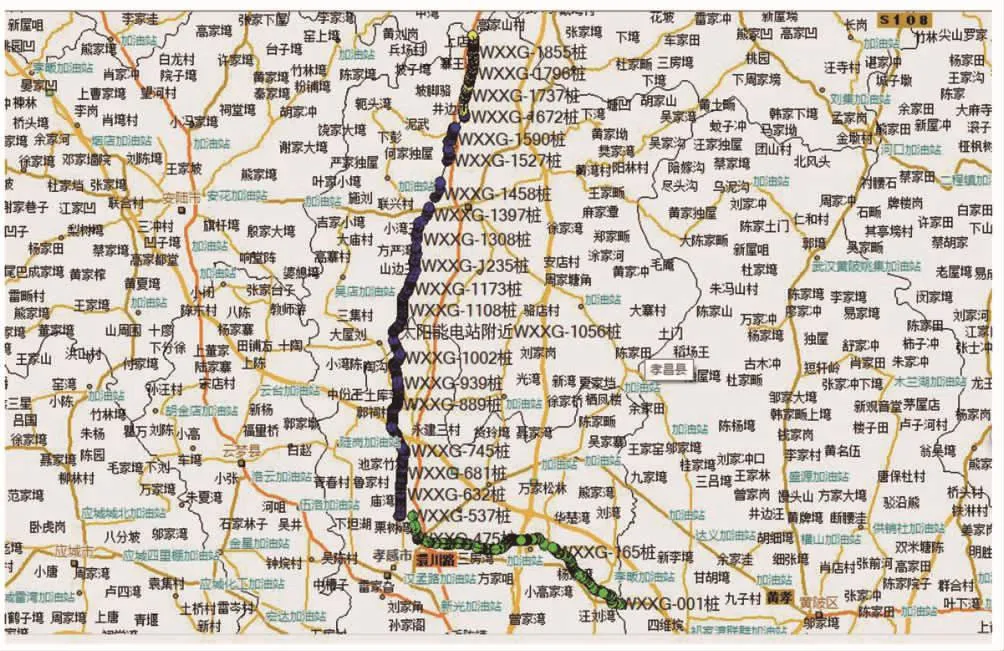
圖2 帶有樁號走向的地圖

圖3 網格化信息報警圖
1.3 信號智能識別及參數優化配置
信號智能識別利用人工智能的支持向量機SVM和BP神經網絡算法,對信號在時域和頻域上進行特征提取,根據提取的特征針對不同的振動信號類型進行模型訓練,最后形成識別模型并組成算法邏輯融合器,對現場振動信號進行實時類型識別,提升系統的智能化和自動化,最后通過振動的智能識別,降低無害入侵的現場復核次數。
1.3.1 邏輯架構
振動信號識別的算法融合器將支持向量機SVM和BP神經網絡兩種算法結合,每一個算法對應一個子分類器,各個分類器之間的訓練、分類和識別過程相互獨立,每個子分類器都會輸出其分類結果,然后對這些分類結果執行“與”運算,輸出最終識別結果。算法融合器邏輯架構如圖4所示。
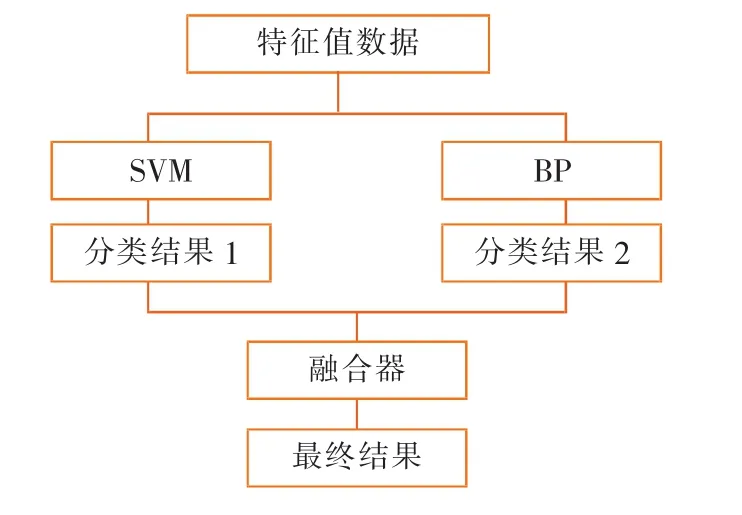
圖4 算法融合器邏輯架構
1.3.2 基本原理
支持向量機SVM的原理是設計一個決策函數,即找到一個最優超平面,將兩類樣本集完全分開且使分類間隔最大化,見圖5,左邊是第一類事件的分辨特征,右邊是第二類事件的分辨特征,設計的決策函數或超平面就是中間的那一條線。
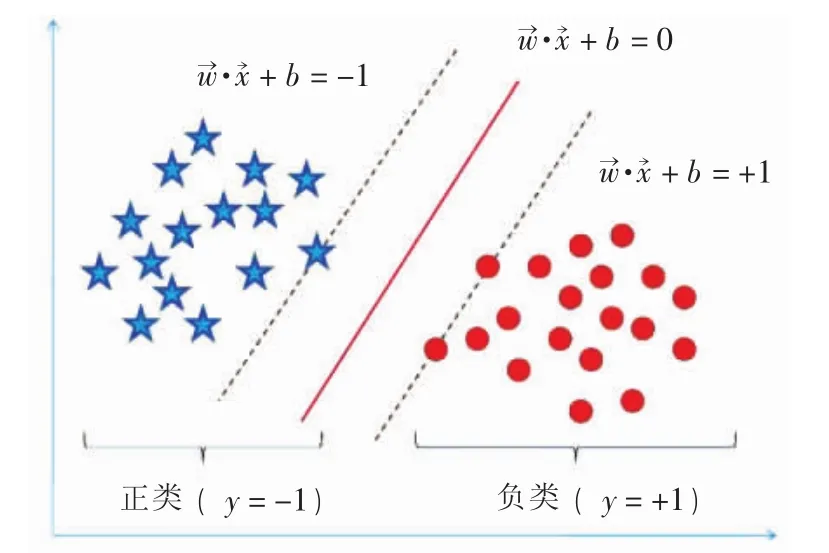
圖5SVM原理
對于線性可分/線性不可分的分辨特征集,間隔最大化的分離超平面為:

x是分辨特征矢量,Φ(x) 是特征空間轉換函數,w和b是最大超平面的參數。最大分離超平面對應的分類決策函數為:
BP神經網絡是一種前饋型的神經網絡,如圖6所示,信息只能從輸入層輸入信息,傳輸時只能向前傳輸,一直傳輸到輸出層為止。整個BP網絡采取分層結構,即輸入層、中間層(隱層) 和輸出層三層。層與層之間采取全連接或全互聯方式連接,同一層的神經元之間沒有連接關系。
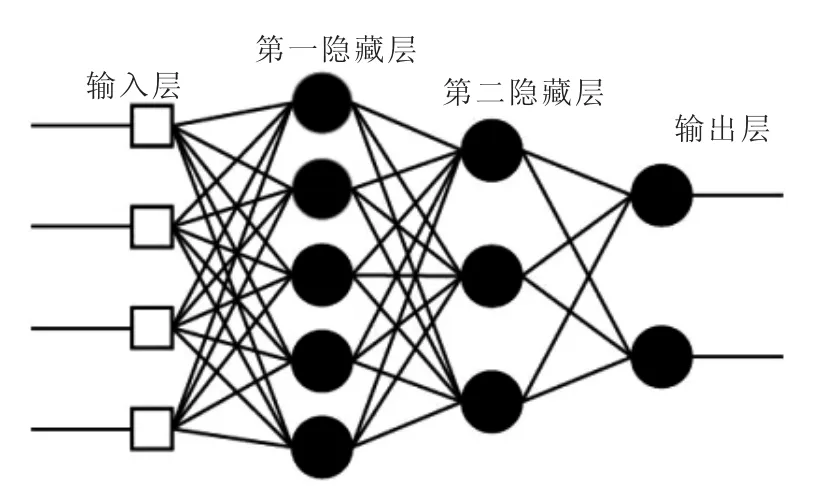
圖6 BP神經網絡原理
在人工神經網絡中,輸入是特征矢量集,輸出是單個結果,該算法實現了多個輸入非線性映射到單個輸出。神經網絡的基本運算單元是神經元,每個神經元有相對應的權重,表示相鄰神經元之間的連接強度。通過設置求和器的閾值和激活函數實現了一個非線性映射,完成神經元的輸出,如圖7所示。
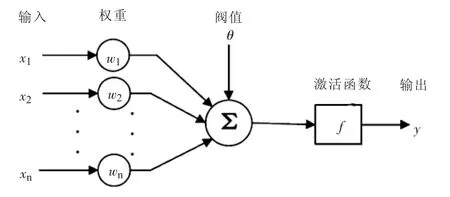
圖7 人工神經網絡模型
1.3.3 信號特征提取
分類器輸入的特征值數據為對信號特征提取后得到的矢量集。具體為長時主沖擊強度分辨特征B1、長時次沖擊強度分辨特征B2、長時幅度比例分辨特征B3、長時小波包分辨特征B4、非異常信號主沖擊強度分辨特征B5、長時嚴格沖擊信號個數B6。不同的事件類型有著不同的B1~B6,將它們輸入到子分類器中,得到各自的分類結果,再將這些分類結果通過報警策略處理,得到最終判別結果。
1.3.4 報警策略
在信號識別分類算法中考慮三分類的情況,將人為偷油挖掘記為1、人工挖掘記為2、安靜環境噪聲記為3。報警策略見表2。從表2可以看出,報警策略為當兩個子分類器同時輸出1時,才輸出為1;當兩個子分類器同時輸出為2時,才輸出為2;其余情況均輸出為3。
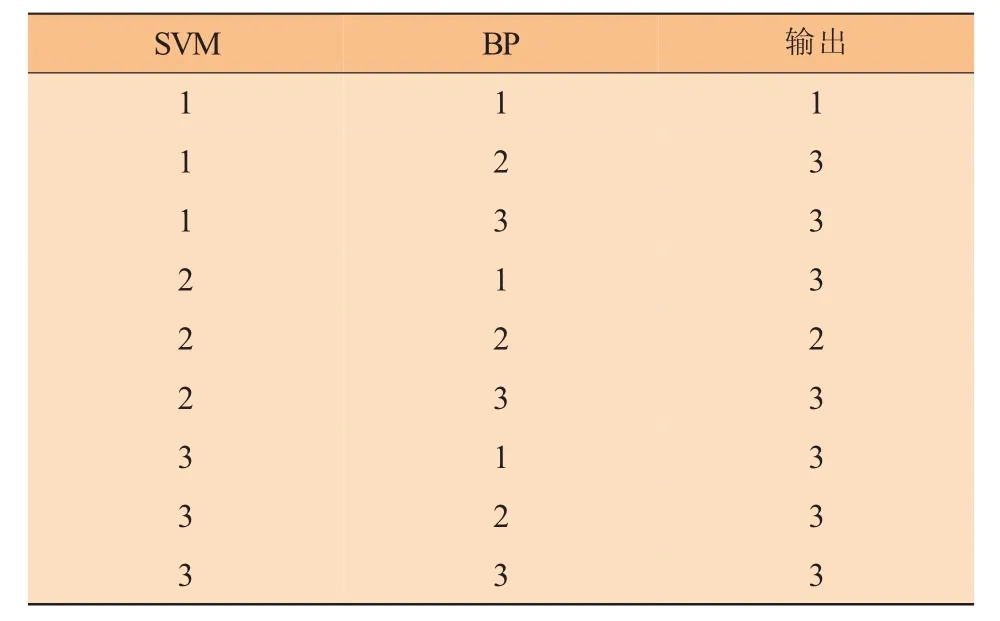
表2 報警策略
1.3.5 配置參數調整
根據前期無效報警相對較多的點,統計報警類別和地點,分析報警原因,對振動源的特點如振動強度、持續時間、時間間隔、位置等進行了統計,針對不同的情況分別調整了各點的靈敏度和閾值。如深度較淺管道,周圍有國道汽車行駛引起誤報較多,可以降低靈敏度或者提高閾值;深度較深管道,可以提高靈敏度降低閾值。
2 方案實施成果
2.1 方案實施效果評價標準
根據管道安全監測的實際需要和傳感系統的特點,現階段評價以上方案實施效果的主要標準為:無異常報警次數降低和報警吻合率提升。
無異常報警是指系統有報警推送,但是現場復核卻沒有發現振動源,因此降低無異常報警次數可以有效降低誤報率,減少現場復核次數。同時以報警吻合率的高低來反映系統報警準確度的高低,在當前使用階段影響吻合率的主要因素是報警現場復核后有無明顯動土痕跡來判斷是否為“無異常”報警,處理結果為“無異常”的報警作為無效報警,如有明顯動土或者振動源則為有效報警。
2.2 方案實施結果
通過對前期統計的無異常報警點進行優化處置,通過跟蹤觀察、現場排查分析,對無異常報警點進行了相應的閾值調整和靈敏度優化,靈敏度調整為過去靈敏度的80%,調整后8月份相較7月份調整前,試點段報警數量明顯減少,從346條變為209條,下降40%,無異常報警從145條降低到12條。報警吻合率從58.09%上升至94.26%,提升36.17%。具體對比數據見表3(表中“無異常”為在報警發生地點未發現任何引起報警的行為但卻報警,其他包括重型車輛駛過、水泵抽水等不在分類里的引起報警的情況)。
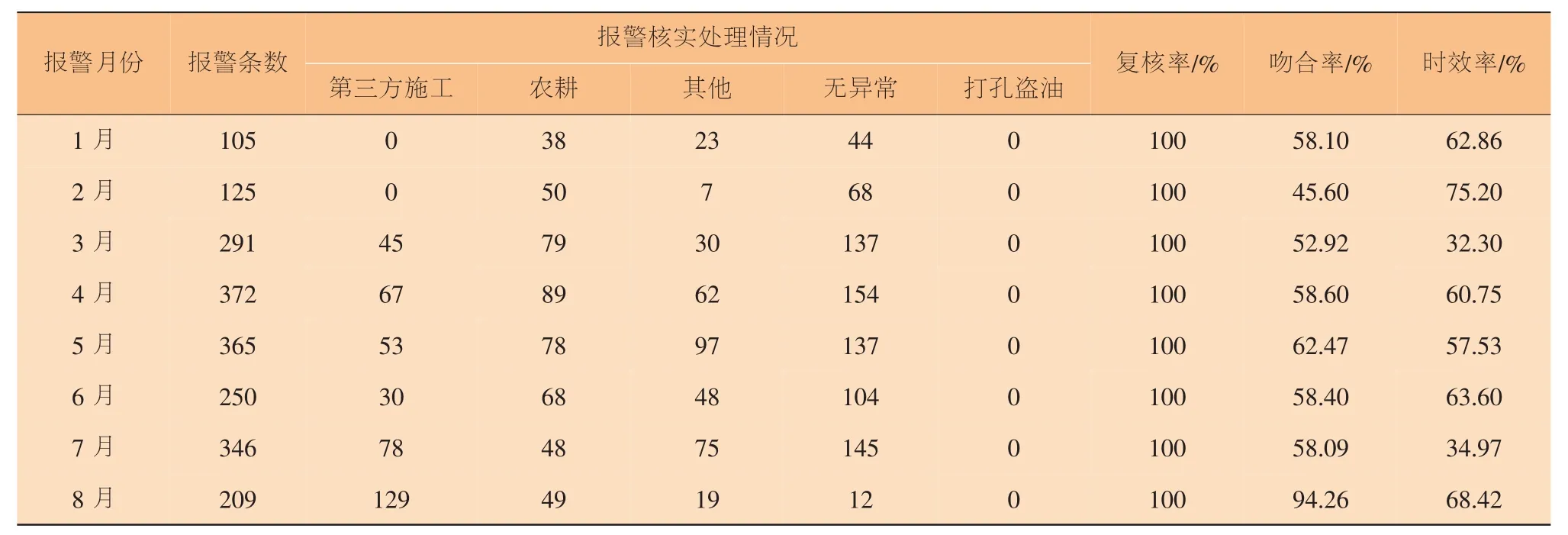
表3 靈敏度優化和無異常處理前后報警數據對比
3 結束語
本文通過對光纖預警系統的試點段進行網格化信息統計、算法優化以及參數調整等方法,使得系統報警復核量減少,報警準確率提升,從而使管道周邊挖掘預警系統的報警響應更高效,為系統工業化運行夯實基礎。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
天天愛科學(2020年6期)2020-09-10 07:22:44
電子制作(2018年11期)2018-08-04 03:25:42
數學物理學報(2017年6期)2018-01-22 02:26:40
中華手工(2017年2期)2017-06-06 23:00:31
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中外會展(2014年4期)2014-11-27 07:46:46
計算物理(2014年2期)2014-03-11 17:01:44