側向駕駛輔助系統發展現狀及技術趨勢
2020-08-13 06:56:44馬駿昭
汽車實用技術 2020年14期
關鍵詞:發展現狀
馬駿昭
摘 要:先進駕駛輔助系統(Advanced Driving Assistance System,ADAS)是智能網聯汽車(Intelligent and Connected Vehicle,ICV)現階段發展的重要力量,文章詳細列舉分析了側向駕駛輔助的發展現狀,包括彎道速度預警、盲區監測、車門開啟預警、變道碰撞預警、車道偏離預警以及車道保持輔助和交通擁堵輔助。并以市場和量產化為導向,分析技術趨勢。
關鍵詞:智能網聯汽車;側向駕駛輔助;發展現狀;技術趨勢
中圖分類號:U471.1 ?文獻標識碼:A ?文章編號:1671-7988(2020)14-20-04
Abstract: Advanced driving assistance system (ADAS) is significant for current development of intelligent and connected vehicles(ICV). This article expounds the state-of-the-art of lateral advanced driving assistance system, which including corner speed warning, blind spot detection, door open warning, lane changing warning, lane departure warning, lane keep assistance and traffic jam assistance. Based on market and mass production., the technical trend is analysed.
Keywords: Intelligent and connected vehicl; Lateral driving assistance; State-of-art; Technical trends
CLC NO.: U471.1 ?Document Code: A ?Article ID: 1671-7988(2020)14-20-04
1 智能網聯汽車發展簡述
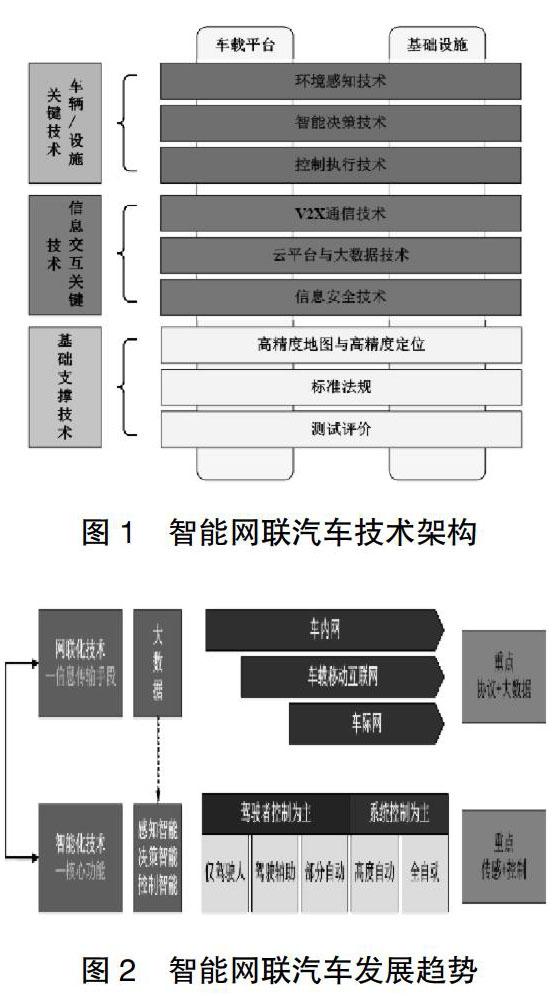
現如今,汽車產業經過一百多年的發展,已逐步由傳統的行駛和運輸工具,向交通運輸體系中用戶的智能移動終端轉變。智能網聯汽車成為轉變中的新型汽車,智能網聯汽車泛指可與通信網絡智能信息交換,并且可進行自主決策控制的車輛[1],能夠提升駕駛員的行車安全性、舒適性和高效性。智能網聯汽車產業技術是多學科融合的,囊括了汽車制造業、通信服務業和交通基礎設施等。因此,智能網聯汽車產業基礎可劃分為“三橫兩縱式架構”[2],如圖1所示。
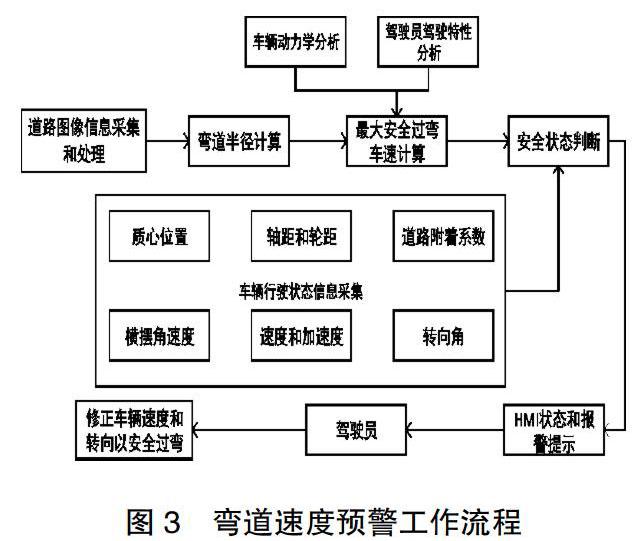
智能網聯汽車在國家戰略層面必將成為中國先進制造業的中流砥柱[2]。《中國制造2025重點領域技術路線圖》中指出,將制定適合中國汽車產業的智能駕駛輔助標準,旨在加快發展高精度高抗擾能力的環境感知傳感器,高智能化的決策芯片和高精準度高自適應性的控制執行機構。實現車輛高效、舒適、智能和個性化駕駛[3]。《智能網聯汽車技術路線圖》提出了總體發展目標,發展趨勢如圖2所示,到2020年,汽車輔助駕駛(Driver Assistance,DA)、部分自動駕駛(Partial Automation,PA)和有條件的自動駕駛(Conditional Automa -tion,CA)新車裝配率超過50%;到2025年,汽車DA、PA和CA新車裝配率超過80%,其中PA和CA級新車裝配率達25%;到2030年,汽車DA及以上級別的智能駕駛系統成為新車標配。
2 側向駕駛輔助系統發展現狀
駕駛輔助功能從車輛運動方向上可以劃分為縱向駕駛輔助和側向駕駛輔助。以中國交通事故深入研究(CIDAS)數據庫為基礎進行分析,發現車輛的側向運動較容易產生交通事故。主要的事故場景有:車輛偏離車道發生事故;車輛行駛與左側盲區內的兩輪車發生碰撞;車輛行駛與右側盲區內的兩輪車發生碰撞;車輛偏離車道后與前方車輛及兩輪車發生碰撞;車輛行駛過程中與盲區內的車輛發生碰撞等5個場景。如車輛應用相應的側向駕駛輔助系統,有助于大幅減少這些場景下的交通事故。以下將詳細闡述側向駕駛輔助中七個功能的發展現狀。
2.1 彎道速度預警
彎道速度預警(Corner Speed Warning,CSW):對車輛狀態和前方彎道進行監測,當行駛速度超過通過彎道的安全車速時發出警告信息[4]。
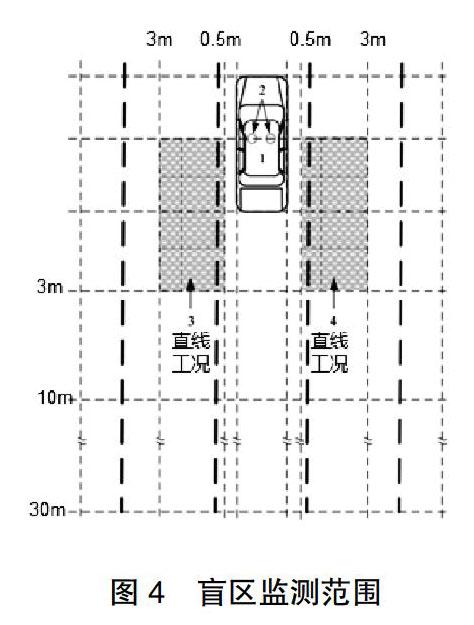
彎道速度預警系統的感知部件為高清攝像頭和車載傳感器,攝像頭模塊一般布置在汽車的后視鏡上,該模塊自帶控制器,通過進行圖像信息采集和處理獲得前方道路參數。車載傳感器采集車輛動力學參數,例如加速度、車速、橫擺角速度和質心位置等;依據道路參數和車輛參數,系統算法會進行計算處理,得到道路的彎道半徑和車輛安全車速邊界值,從而判斷車輛當前狀態是否存在風險。當控制單元判斷當前車速高于安全車速邊界值,如果判定結果是車速過高,系統將會對駕駛員發送預警信息,例如聲光報警和方向盤振動等,引導駕駛員及時采取制動或者轉向,避免車輛甩尾或側傾事故的發生。為實現車速預警的功能,彎道速度預警系統一般由道路識別模塊、安全車速計算模塊、安全狀態判斷模塊和人機交互模塊四部分組成,其主要工作流程如圖3所示。
彎道安全臨界車速與車輛轉彎半徑直接相關,當通過計算道路曲率得到車輛彎道轉彎半徑,結合車輛動力學參數并根據一定的算法計算可得出車輛臨界安全車速,因此,對于不同類型的車輛,測量彎道半徑是計算車輛臨界安全車速的關鍵。近年來,出現了利用全球定位系統(GPS)、激光、超聲波、紅外等技術來測量彎道半徑的方法,但是,視覺信號仍然具有成本低、采集信號范圍寬、用戶友好性高等先天優勢,尤其是在車道圖像的檢測識別上具有明顯優勢。隨著計算機運算速度的提高,數字圖像處理精度高,再現性好,靈活性高和適用面寬的優點將愈發凸顯。
2.2 盲區監測
盲區監測(Blind Spot Detection,BSD):實時監測駕駛員視野盲區,并在其盲區內出現其它道路使用者時發出提示或警告信息[5]。
盲區監測系統一般采用分級報警,當其他車輛進入盲區,但系統判斷并無碰撞風險時啟動一級報警,布置在左右外后視鏡上或A柱上的LED報警指示燈將點亮;當系統判斷盲區內有車輛且有碰撞風險,將啟動二級報警,報警指示燈開始閃爍,儀表盲區監測圖標閃爍、蜂鳴報警音響起、座椅震動等多種報警方式將共同啟動。根據車型級別和行駛工況的不同,盲區監測范圍有較大差異,主要為側后盲區(如圖4所示)和轉向盲區,觸發的邊界條件有車速、檔位和中控門鎖。
盲區監測系統的功能是建立在毫米波雷達對盲區探測的基礎上的,抗干擾能力強、精準度高的毫米波雷達是盲區監測理想的傳感器,毫米波雷達的工作頻率以24GHZ和77GHZ為主。通過優化控制系統算法,盲區監測系統還可以進一步拓展出車門開啟預警(Door Open Warning,DOW)和變道碰撞預警(Lane Changing Warning,LCW)等功能。
2.3 車門開啟預警
車門開啟預警(Door Open Warning,DOW):在停車狀態即將開啟車門時,監測車輛側后方的其它道路使用者,并在可能因車門開啟而發生碰撞危險時發出警告信息[6]。
車門開啟預警系統主要應用于車輛路邊停車應用場景。系統通過自動檢測車門后側物體的運動狀態參數,包括速度、距離、角度和方向,確定目標物體的位置,預測目標物體在預警區域內的停留時域和車內乘客開門動作時域,通過比較兩者時域是否有重合來判斷風險,如有風險則觸發預警,提醒駕乘人員開門時注意安全,或者進行車門制動,阻止乘客打開車門。因此,傳感器探測目標并獲取其狀態參數是系統設計的關鍵。車門開啟預警系統主要由車輛信息感知模塊、目標物體感知模塊、預警控制模塊、預警執行模塊四個部分組成,系統的基本架構如圖5所示。
2.4 變道碰撞預警
變道碰撞預警(Lane Changing Warning,LCW):在車輛變道過程中,實時監測相鄰車道,并在車輛側/后方出現可能與本車發生碰撞危險的其它道路使用者時發出警告信息[7]。
變道碰撞預警是盲區監測系統的又一項拓展功能,其系統開啟條件與盲區監測系統、車門開啟預警系統的控制邏輯相似。變道碰撞預警系統傳感器對車輛側后方障礙物的運動狀態包括速度,距離以及方位角度進行實時測量,車輛行駛中側后方物體可能運動狀態如圖6所示。
如上圖所示,A為相鄰車道的運動目標車輛,B為本車道報警區域內的運動目標車輛,C為本車正后方的運動目標車輛。A、B和C可能的運動軌跡如表1所示。
2.5 車道偏離預警
車道偏離預警(Lane Departure Warning,LDW):實時監測車輛在本車道的行駛狀態,并在出現非駕駛意愿的車道偏離時發出警告信息[8]。
車道偏離預警系統的工作流程主要分為道路圖像預處理、車道檢測、車道線檢測和車道偏離檢測。為了計算輸入圖像中的關心區域,系統須對已知的范圍進行檢測,當車輛在直線道路或大曲率半徑道路,檢測范圍會變得無限大,因此一般系統須在不超過250米的道路曲率半徑下工作,并在位于車道邊界外0.3m的最晚警戒線和車道邊界內0.75m的最早的警戒線范圍內設置報警閾值。車道識別是系統中的關鍵部分,目前,主流的車道識別算法是在感興趣區域 (Region of Interest,ROI)中建立搜索窗口的方法,在確定ROI的寬度時,以車道線的寬度為基準設置,使系統能夠更好的處理非理想路況的不確定因素,并建立實時動態搜索帶,除了能更精確的追蹤車道標志線之外,還能更好地應用于彎路路況。卷積法、Lucas-Kanade(L-K)光流法、車道線追蹤(Kalman濾波法)是目前較為常見的車道線檢測算法[9],預警算法中的關鍵是根據采集到的圖像信息中的邊線探測點擬合車道線。然而,圖像噪聲,車道線不完整等情況無法避免,如何在清晰度降低的情況下快速準確的檢測出車道線成為關鍵。
2.6 車道保持輔助
車道保持輔助(Lane Keep Assistance,LKA):包括車道偏離抑制(Lane Departure Prevention,LDP)和車道居中控制(Lane Centering Control,LCC)兩級功能。車道偏離抑制:實時監測車輛與車道線的相對位置,在其將要超出車道線時介入車輛橫向運動控制,以輔助駕駛員將車輛保持在原車道內行駛。車道居中控制:在車輛行駛過程中,持續自動控制車輛橫向運動,使車輛始終在車道中央區域內行駛[10]。
車道保持輔助系統可分為感知層、決策控制層和執行層三部分:感知層用于采集車道信息及車輛信息;決策控制層基于輔助力矩及真實駕駛員轉向力矩生成虛擬駕駛員轉向力矩;執行層主要為電子助力轉向系統和制動系統。
2.7 交通擁堵輔助
交通擁堵輔助(Traffic Jam Assistance,TJA):在車輛低速通過交通擁堵路段時,實時監測車輛前方及相鄰車道行駛環境,經駕駛員確認后自動對車輛進行橫向和縱向控制。
交通擁堵輔助系統基于“前視攝像頭(Forward Camera Module,FCM)和前毫米波雷達(Forward Radar Module,FRM)”的傳感器組合進行開發,可同時進行橫向或縱向運動控制,因此可認為是L2級ADAS功能[11]。一般交通擁堵輔助系統的工作速度區間為0~60km/h,在此速度范圍內可為駕駛員提供車輛的縱向和橫向輔助。交通擁堵輔助系統的縱向輔助由自適應巡航控制ACC(Adaptive Cruise Control)系統實現,將自身車輛維持在固定的車速或者與前方道路使用者的固定時距行駛。系統較典型的橫向輔助策略是,如果車道線存在,車輛會被維持在車道之內行駛,否則車輛會跟隨前方車輛的橫向移動行駛。
交通擁堵輔助系統的觸發條件包括:所有車門完全關閉;駕駛員正確佩戴安全帶;啟動發動機并掛入D擋;ESC處于開啟狀態并駐車制動未激活等。
3 側向駕駛輔助系統技術趨勢
駕駛輔助系統可提高駕駛員行車安全性和駕駛舒適性,是提升出行效率、解決交通事故頻發問題的有效措施。當前國內機動車保有量穩步快速增長,廣大汽車用戶走向多樣化,以用戶為導向的產品開發理念越來越被汽車廠家采用,駕駛輔助系統在提升汽車產品力和用戶友好度上作用明顯,因此駕駛輔助系統的技術必然是以量產為基礎,以用戶為導向不斷發展。
3.1 環境感知系統融合開發
單一的攝像頭或雷達方案存在先天的優勢和不足。攝像頭方案的優勢在于成本較低,開發門檻較低。其不足在于受天氣、環境等外部因素影響大和算法穩定性較差。雷達的優勢在于穩定可靠、受天氣等影響較小,不足是成本高和缺乏辨識能力。因此,采用雷達和攝像頭融合方案,綜合多傳感器的信息輸入將會是未來的主流環境感知系統配置。
3.2 智能通用芯片開發
在駕駛輔助功能多樣化的背景下,單一系統專用硬件芯片雖然有成本和性能等優勢,但每個功能系統需要獨立開發算法,開發周期過長且存在技術融合壁壘。相比較,通用芯片能更快地適應ADAS系統整體開發,從而大幅縮短開發時間,加速產品上市。
3.3 建立科學的駕駛行為模型
量產車型配置的駕駛輔助系統面向廣大用戶,需考慮不同用戶的個人差異。因此,建立科學的駕駛人行為模型在ADAS系統開發中尤為重要,通過多維信息的融合可以使駕駛人行為監測結果更為完整,能夠更加可靠地將識別駕駛人行為意圖,使系統警告觸發和行車干預更加科學。
4 結束語
高級駕駛輔助系統在智能網聯汽車發展中占據著舉足輕重的地位,其中側向駕駛輔助系統和應用可以有效提高駕駛安全性。本文詳細闡述了典型側向駕駛輔助系統的技術發展現狀和趨勢,側向駕駛輔助系統在環境感知層,智能決策層和控制執行層均具備應用于量產車型并面向客戶的產業能力。
參考文獻
[1] 中國汽車工程學會.節能與新能源汽車技術路線圖[M].北京:機械工業出版社,2016.
[2] 李克強,戴一凡,李升波,等.智能網聯汽車(ICV)技術的發展現狀及趨勢[J].汽車安全與節能學報,2017,8(1):1-14.
[3] 《中國制造2025》重點領域技術創新路線圖(2017年版)發布[J].稀土信息,2018,(2):32-33.
[4] 余貴珍,李芹,王云鵬,等.車輛彎道行駛側傾穩定性分析與側翻預警研究[J].北京工業大學學報,2014,40(4):574-579.
[5] 劉保祥.基于毫米波雷達的汽車盲區監測系統研究[J].北京汽車,2019,(5):21-23,34.
[6] 丁紅霞,楊欣怡,王明莉,等.車門開啟瞬間防撞預警系統研究[J].科技展望,2016,26(7):136-137.
[7] 王軍雷,李百川,應世杰,等.車道變換碰撞預警分析及最小縱向安全距離模型的研究[J].人類工效學,2004,10(4):16-19.
[8] 仝光,李虎,鄭文成.車道偏離預警系統研究概述[J].汽車與配件, 2009,(18):26-27.
[9] 錢沄濤,胡忠闖,陳思宇.利用卷積神經網絡的車道線檢測方法[J].信號處理,2019,35(3):435-442.
[10] 李進,劉洋洋,胡金芳.人機協同下輔助駕駛系統的車道保持控制[J].機械工程學報,2018,54(2):169-175.
[11] 閆璽池,冀瑜.SAE分級標準視角下的自動駕駛汽車事故責任承擔研究[J].標準科學,2019,(12):50-54.
猜你喜歡
現代經濟信息(2016年19期)2016-10-20 19:05:57
中國科技博覽(2016年19期)2016-10-19 13:51:05
中國科技博覽(2016年19期)2016-10-19 13:29:00
中國科技博覽(2016年18期)2016-10-19 11:35:03
中國科技博覽(2016年18期)2016-10-19 09:20:36
中國市場(2016年36期)2016-10-19 04:06:52
中國市場(2016年33期)2016-10-18 13:06:04
科技視界(2016年21期)2016-10-17 18:44:27
現代園藝(2016年17期)2016-10-17 07:24:22
科學與財富(2016年28期)2016-10-14 18:40:58
