電磁力作用下槽道流速度響應的放大機理
2020-08-08 02:40:06張成龍江代文
空氣動力學學報 2020年3期
關鍵詞:效率
張成龍, 張 輝,2,*, 江代文
(1. 南京理工大學 瞬態物理國家重點實驗室, 南京 210094; 2. 帝國理工學院 數學系, 倫敦 SW7 2AZ, 英國)
0 引 言
飛行器、艦船等航行體在運動時,黏性流體在其表面形成的邊界層可產生較大的阻力、振動和噪聲,嚴重時會導致航行體失穩。為了減少此類情況的發生,對邊界層加以適當的控制,通過改變其結構,從而達到減阻、減振、降噪的效果[1-4]。目前的主動控制方法雖能取得顯著的控制效果,但輸入的能量較大,甚至比減阻節約的能量高一個數量級以上,因此減少輸入能量、提高控制效率成為制約主動流動控制發展的瓶頸問題。
電磁力流動控制方法作為主動流動控制方法之一,有響應速度快、控制效果好、靈活性強等優點,在層流和湍流的流動控制中都有廣泛應用[5-6]。英國學者Gailitis最早利用電磁力進行流動控制,將電磁激活板置入弱電解質溶液中,通電后產生的電磁力可以改變邊界層結構。隨著電磁流動控制的發展,其控制效率問題逐漸受到越來越多的關注。其中槽道流動作為一種典型流動,由于其流向和展向滿足周期性邊界條件,從而在計算量不大的情況下即可進行層流和湍流的直接數值模擬,但卻也是因此不能直接利用此方法進行轉捩流動的研究。Berger[7]等對槽道湍流的電磁力控制進行直接數值模擬,討論了電磁力的控制效率問題。他將控制效率定義為:減阻節約的能量與施加電磁力所使用的能量之比。研究發現,對較低雷諾數下的槽道湍流施加展向電磁力,減阻率可達到40%,但是所需電磁力的能量比減阻節省的能量大一個數量級以上。當雷諾數增加時,控制效率進一步減小。O’Sullivan[8]等在類似的研究中發現,當施加的電磁力很小時,很難對湍流流場產生實質性的影響。而逐漸增大施加的電磁力,產生電磁力輸入的能量始終比減阻節約的能量大。后來,Shatrov[9]等同樣利用直接數值模擬,用時變電磁力和恒定電磁力分別對槽道湍流進行控制。結果表明,研究的所有參數組合中,輸入能量均大于減阻節約的能量。Gadel-Hak[10]利用了閉環反饋控制方法,但并未顯著提高槽道湍流的電磁力控制效率。Rogers[11]、Sankar[12]等對電磁力控制翼型繞流分離的增升減阻效率進行研究,分析了電磁力控制過程及不同工況條件下的電磁力控制效率。陳耀慧[13]等數值研究了翼型繞流電磁力控制過程,發現電磁力控制能量的損耗主要體現在流體動能上。Chen[14]等比較了全包覆和局部包覆的電磁力控制方法,結果表明,在特殊位置施加局部電磁力控制流動的效果與全包覆電磁力的控制效果相當,但輸入能量仍大于減阻節約的能量。
綜上,目前的電磁力控制方法雖能取得很好的控制效果,但控制效率很低。本文作者也曾對電磁力的優化控制進行過相關研究[5-6],但僅通過參數優化、局部作用、反饋控制等方法,收效甚微,其根源在于輸入的能量較大,即施加較大的電磁力才能在流場中誘導出足夠大的響應。因此,若能以較小的電磁力便可誘導出大的響應,這將為大幅提高控制效率提供可能。
本文以層流槽道流動作為研究對象,在槽道的下壁面施加沿展向余弦分布的展向電磁力,推導了線性條件下流向響應速度的解析解,并通過直接數值模擬對非線性條件下的響應進行了計算。結合解析解和數值解,揭示了流場中速度響應的放大機制,討論了電磁力和流場參數對響應放大效果的影響。
1 理論模型
以弱電解質溶液在槽道中的層流流動為研究對象,模型如圖1所示。直角坐標系原點位于下壁面,其中x、y、z分別代表流向、法向和展向。槽道在這三個方向的尺寸為Lx×Ly×Lz=(4π/3)×2×(2π/3)。

圖1 槽道模型示意圖Fig.1 Diagrammatic sketch of channel flow
對此不可壓縮三維槽道流,將電磁力作為源項,無量綱化N-S方程為:
(1)
·u=0
(2)

f=(0,0,fz)
(3)
fz=Ae-y/Δcos(kz)
(4)
1.1 線性條件下的解析解
將式(1)、式(2)寫成直角坐標系下的形式,有

(5)

(6)

(7)

(8)

(9)

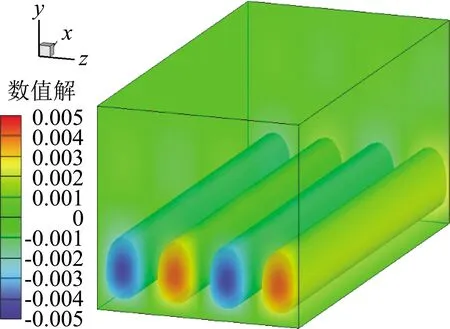
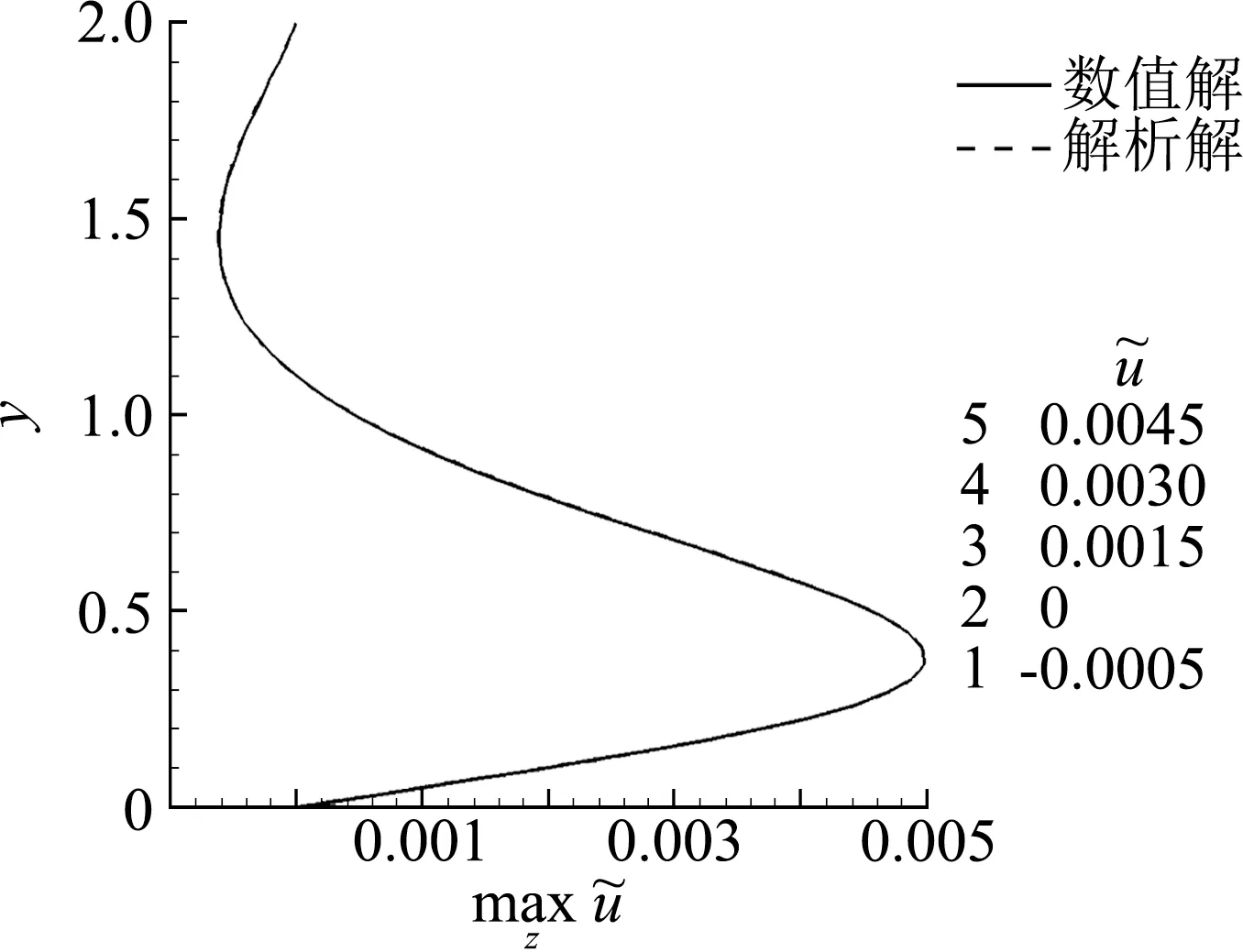
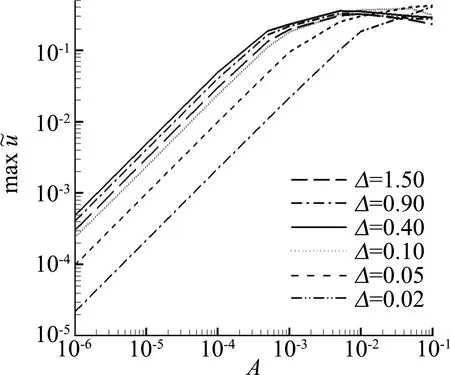
考慮到槽道流的特點,式(1)和式(2),沿流向和展向滿足周期性邊界條件,法向滿足壁面無滑移邊界條件[6]。初始條件為基本流UB(y)=1-(1-y)2=2y-y2,(0 當電磁力振幅0 (10) (11) (12) 2e-y/Δ}sin(kz) (13) 隨著電磁力的增大,流場的響應逐漸進入非線性范圍,因此需要通過數值計算去求解。本文采用直接數值模擬,對方程(1)和(2)利用Fourier-Chebyshev譜方法進行空間離散。時間項采用三階精度的半隱式向后差分格式求解。線性項和壓力項,通過影響矩陣法和Chebyshev-tau方法聯立求解,以消除殘余散度。非線性項,利用3/2規則消除混淆誤差。槽道沿流向和展向均采用均勻網格周期性邊界條件,沿法向為非均勻網格壁面無滑移條件[6]。文中使用的上述算法基于槽道湍流的算例驗證已在文獻[6]中詳細討論,層流時的速度響應將在下文中與解析解結果進行對比。計算過程中流向流量保持不變,并選取雷諾數Re=500~2000的算例進行研究。 (a) 數值解 (a) A=1×10-5 (a) Kz=1 圖5 最大響應速度隨滲透深度和波數的變化Fig.5 Variations of the response with effective penetration and wave number 圖6 流向最大響應速度放大倍數隨波數和振幅的變化Fig.6 Variations of the amplification along the streamwise direction with wave number and amplitude 圖7 流向最大響應速度隨波數和振幅的變化Fig.7 Variations of the response with wave number and amplitude 圖8 流向最大響應速度放大倍數隨滲透深度和振幅的變化Fig.8 Variations of the amplification along the streamwise direction with effective penetration and amplitude 圖9 流向最大響應速度隨滲透深度和振幅的變化Fig.9 Variations of the response with effective penetration and amplitude 圖10 流向最大響應速度放大倍數隨雷諾數和振幅的變化Fig.10 Variations of the amplification along the streamwise direction with Reynolds number and amplitude 圖11 流向最大響應速度隨雷諾數和振幅的變化Fig.11 Variations of the response with Reynolds number and amplitude 本文以層流槽道流動作為研究對象,在槽道的下壁面施加沿展向分布的電磁力,推導了線性條件下流向響應速度的解析解,并通過直接數值模擬對非線性條件下的響應進行了計算。結果表明: 1) 當振幅較小時(A≤1×10-4),速度響應處于線性范圍,其放大倍數與Re2成正比;隨著Δ的增大,先迅速增大后緩慢減小;隨著展向波數Kz的增大單調減小。此時最大響應的放大倍數在102~ 103量級。 2)隨著振幅的增大,放大倍數進入非線性范圍,其值逐漸減小,但速度響應值先增大后減小。在振幅處于10-3~10-2量級時,速度響應可達到最大值超過0.2,此時的放大倍數在102量級。 利用流場的放大效果與Re2的相關性,將電磁力的響應先進行放大,再用來控制流場的流動,為目前的主動流動控制理論和技術提供了新的方法。本文基于大響應的研究是實現高效流動控制的重要環節。 附 錄 線性條件下解析解的詳細推導如下。 對本文中不可壓縮三維槽道流,將電磁力作為源項,其無量綱化N-S方程為: (1) ·u=0 (2) f=(0,0,fz) (3) fz=Ae-y/Δcos(kz) (4) 將方程(1)、(2)寫成直角坐標系下的形式,有 (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) 在槽道流中沿z方向滿足周期性條件,因此方程組解的形式如下: (18) 式(4)中的電磁力可寫為: fz=Ae-y/Δcos(kz) =Ae-y/Δeikz/2+Ae-y/Δe-ikz/2 (19) 將式(18)、式(19)的等號右端第一項代入式(14)~式(17)可得: (20) (21) (22) (23) 同樣,將第二項代入式(14)~式(17)可得: (24) (25) (26) (27) 求解方程組,可得 (28) (29) (30) (31) (32) (33) (34) (35)



1.2 數值解
2 結果與討論
2.1 流向響應速度的算例驗證

2.2 流向速度響應隨電磁力和流場參數的變化











3 結 論






















 猜你喜歡
瘋狂英語·初中天地(2021年5期)2021-07-21 02:24:28甘肅教育(2020年14期)2020-09-11 07:57:42中學生數理化(高中版.高考數學)(2020年5期)2020-06-02 09:19:08商周刊(2017年9期)2017-08-22 02:57:49遼寧經濟(2017年6期)2017-07-12 09:27:16中國衛生(2016年9期)2016-11-12 13:27:54時代英語·高二(2015年1期)2015-03-16 00:08:11中國洗滌用品工業(2015年7期)2015-02-28 19:02:38電子設計工程(2015年12期)2015-02-27 12:06:10中國衛生(2014年11期)2014-11-12 13:11:32
猜你喜歡
瘋狂英語·初中天地(2021年5期)2021-07-21 02:24:28甘肅教育(2020年14期)2020-09-11 07:57:42中學生數理化(高中版.高考數學)(2020年5期)2020-06-02 09:19:08商周刊(2017年9期)2017-08-22 02:57:49遼寧經濟(2017年6期)2017-07-12 09:27:16中國衛生(2016年9期)2016-11-12 13:27:54時代英語·高二(2015年1期)2015-03-16 00:08:11中國洗滌用品工業(2015年7期)2015-02-28 19:02:38電子設計工程(2015年12期)2015-02-27 12:06:10中國衛生(2014年11期)2014-11-12 13:11:32
