Liutex-渦定義和第三代渦識別方法
2020-08-08 02:45:02劉超群
空氣動力學學報 2020年3期
劉超群
(美國德州大學阿靈頓分校, 得克薩斯 阿靈頓 76019, 美國)
0 引 言
自然界中渦無處不在,小到原子中的電子運動,大到銀河系星云,都屬于渦。肉眼可見的渦更是比比皆是,龍卷風、颶風、臺風,這些典型的集中渦具有極強的破壞力。更為重要的是湍流中存在著大量各種尺度不一和強度各異的渦結構,并且這些渦在湍流生成和維持過程中發揮著關鍵性的作用。然而長期以來渦并沒有一個為大家普遍接受的定義[1-2]。直觀上講,渦代表流體的旋轉運動,也就是說,有流體轉動的地方就有渦,反過來,有渦就有流體轉動。但這只是物理概念,我們需要給渦一個定量的數學定義。顯然,渦是一個流體轉動的物理現象,而速度的旋度或者渦量是一個數學定義,二者并沒有天然的必然聯系,但長期以來很多教科書,都將渦(Vortex)和渦量管(Vorticity Tube)混淆,認為渦的強度(Vortex Strength)就是渦量(Vorticity),這就是所謂的“渦渦不分”或者“渦就是渦”(Vortex is Vorticity)。追根究底,“渦就是渦”的概念來源于Helmholtz。1858年Helmholtz[3]提出渦量絲、渦量線和渦量管的概念以及Helmholtz三定律,文中Helmholtz就直接就用渦量(Vorticity)表示渦絲(Vortex Filament)。當然,如果考慮流體黏性,經典渦動力學的Helmholtz三大定律并不成立。這里,我們把基于渦量來顯示和識別渦結構的方法稱為第一代渦識別方法。盡管Helmholtz渦定義出現在幾乎所有流體力學教科書中,但科學研究表明渦量和渦是兩個截然不同的概念。二者都是矢量,但方向和大小各不相同,完全不能畫等號。Robinson[4]在1991年就發現高渦量區域和實際流體旋轉之間的關聯性非常低。Wang和Liu等人[5]在直接數值模擬結果中發現不僅渦量和渦的方向完全分道揚鏢,而且存在旋轉強但渦量反而小的區域,其周圍不旋轉的地方渦量反而很大。也就是說,如果將渦看成一個有大小和方向的物理量,那么其大小和方向與渦量都大相徑庭。因此,不能用渦量來表示渦,也就是不能“渦渦不分”。“渦渦”的區別必須研究清楚。為了應對第一代渦識別方法存在的問題,自20世紀80年代以來,人們陸續提出了以Q、λ2、Δ和λci等方法[6-9]為代表的第二代渦識別方法,在渦識別方面取得了很大進展。這些方法都從某種程度上認識到不能用渦量來度量渦的強度,由于渦量是由Cauchy-Stokes 速度梯度張量分解得到的反對稱張量而來,人們認識到不能單純用反對稱張量或者渦量來顯示渦,而應整體考慮速度梯度張量,首先就是它的特征值。速度梯度張量的特征值和特征值的任何組合都是伽利略不變量,不隨坐標平移或者勻速轉動而改變,所以第二代渦識別方法可以歸納為以特征值為基礎的渦識別方法(Eigenvalue-Based)。但第二代渦識別方法存在先天性的缺陷:1)Q、λ2、Δ和λci都模糊地代表渦的強度,但本身物理意義并不清晰,其等值面在多大程度上能代表渦結構存在爭議;2) 渦是流體繞軸線的旋轉,具有方向性,而第二代渦識別方法都是標量,無法給出方向的信息;3) 在使用中存在隨意選擇閾值的問題,不具有唯一性;4) 第二代渦識別方法基本上都是基于Cauchy-Stokes分解和速度梯度張量V的特征值,而忽略了特征向量所提供的信息;5) 識別結果存在不同程度的剪切污染,將剪切和拉伸壓縮都錯誤地當作流體旋轉的一部分或者渦強度的一部分;6) 無法同時識別強渦和弱渦,閾值太大則弱渦消失,閾值太小則強弱渦混在一起,一團模糊。
針對第一代和第二代渦識別方法存在的問題,德州大學阿靈頓分校Chaoqun Liu教授及其團隊從2014年開始,開展了一系列工作,先后提出了Ω渦識別方法[10]、Liutex向量[11-13]、Liutex-Ω渦顯示方法[14-15]、客觀性Ω渦識別方法[16]、客觀性Liutex向量[17]、基于Liutex的渦量分解和速度梯度張量分解[18]、Liutex渦核線[19-20]、Liutex 相似律[21]。自2018年以來團隊已經在PhysicsofFluids上發表14篇、JournalofHydrodynamics上發表14篇相關論文。這里將這一系列工作歸納為第三代渦識別方法,并在下面進行詳細介紹。
2016年,Liu等人[10]提出了Ω渦識別方法。與其他第二代渦識別方法相比,Ω方法具有物理意義清晰、易于實現、歸一化(取值范圍0~1)、能夠同時捕捉強渦和弱渦,并且無需大幅度調節閾值的優點。Liu等人在2014年[1]就指出,渦量不能代表當地流體的剛性旋轉,而應該將渦量進一步分解為旋轉部分和非旋轉部分。基于這一概念,2017年12月在上海理工大學舉辦的“首屆渦和湍流若干關鍵問題研究進展和再認識研討會”上,Liu第一次提出從流體運動中提取剛性轉動部分,并命名為Rortex向量[11],隨后在2018年底更名為Liutex向量。基于Liutex向量R的定義,渦量ω可以進一步分解為剛性轉動R和反對稱剪切ω-R。同樣,速度梯度張量v也可以分解為剛性旋轉的部分(對應R)和非旋轉(NR)部分。這一分解與傳統的Cauchy-Stokes分解將v分解為對稱部分和反對稱部分不同,真正找到了當地流動中剛性旋轉部分。時至今日,已經形成一個較為完整的理論系統[11-13]。
自然界的渦有六大要素:1) 渦的絕對強度;2) 渦的相對強度;3) 渦的當地旋轉軸;4) 渦整體轉軸位置;5) 渦核大小;6) 渦邊界定義。第一代渦識別方法無法給出這些要素,而第二代僅能在特定閾值條件下提供渦的大致邊界。以Liutex向量為基礎的第三代渦識別方法能夠完整回答以上渦的六大要素問題。
本文第一部分簡單介紹基于渦量的第一代和基于特征值的第二代渦識別方法,包括Ω方法及其優越性;第二部分介紹渦科學的數學基礎;第三部分介紹Liutex定義,和基于Liutex的渦量分解及速度梯度張量分解;第四部分介紹基于Liutex的渦識別方法,包括Liutex向量、Liutex等值面、Liutex-Ω等值面、Liutex渦核線等;第五部分介紹渦的六大要素和三代渦方法比較;第六部分介紹湍流邊界層中的Liutex相似律。最后對未來第三代渦識別方法進一步發展做出展望。
1 第一代和第二代渦定義和識別方法簡單回顧
1.1 第一代渦定義和識別方法


圖1 二維渠道層流(渦量大但沒有旋渦或者流體轉動)Fig.1 2D laminar channel flow with no fluid rotation, or vortex
具體到湍流流動中,Robinson[4]在1991年就報道湍流邊界層中,尤其是在壁面附近,渦量與渦的相關性相當微弱。Wang和Liu[5]也在邊界層轉捩的DNS計算中發現,Λ渦在渦核處渦量較小,在渦核外反而渦量較大(見圖2)。另外,圖3給出穿過Λ渦的渦量線和渦結構分布,可以看到無論是方向還是大小, 二者都分道揚鑣。根據以上分析和例證,還有無數工程技術研究人員的報告,都表明不能用渦量(Vorticity)來代表渦或者捕捉渦結構。當然他們加了一些限制條件比如理想正壓體積力有勢等,但渦動力學主要用來研究湍流,理想流體還有什么湍流?結果學生基本上一致誤認為Vortex就是Vorticity。顯然基于渦量的第一代渦識別方法來代表或者捕捉渦結構是不合適的。

圖2 Λ渦及其中心截面上的渦量分布[11]Fig.2 Λ vortex and the vorticity distribution in the central plane[11]

圖3 Λ渦及穿過渦核的渦量線分布[11] Fig.3 Λ vortex with surounding vorticity lines[11]
1.2 第二代渦識別方法
事實上,正是由于基于渦量的第一代渦識別方法無法準確地捕捉和識別流場的渦結構,在20世紀80和90年代,人們陸續提出很多新的渦識別方法,比較著名和具有代表性的包括Q、λ2、Δ和λci等方法。盡管它們理論基礎各不相同,但基本都是由當地速度梯度v的特征值唯一確定,可以將它們歸納為基于速度梯度張量特征值的第二代渦識別方法。速度梯度張量v是:

(1)
它的的特征方程為:

(2)
可以寫為:
λ3+Pλ2+Qλ+R=0
(3)
用λ1、λ2和λ3代表式的三個特征值,則有
P=-(λ1+λ2+λ3)=-tr(V)
(4)

(5)
R=-λ1λ2λ3=-det(V)
(6)
其中,tr代表矩陣的跡,det代表矩陣的行列式。P、Q和R是速度梯度張量v的三個伽利略不變量,并且對于不可壓縮流動,根據連續方程有P=?u/?x+?v/?y+?w/?z=0。
1.2.1Q-判據
在第二代渦識別方法中,Q準則是應用最為廣泛的一種渦識別方法。Hunt[6]等人(1988)建議使用速度梯度張量v的第二個伽利略不變量Q>0代表渦結構。根據Cauchy-Stokes分解,
v=A+B
(7)
B=

Q表達式可以寫為:

(8)
式中,‖‖F代表矩陣的Frobenius范數。根據上文的討論,對稱張量A有抵消反對稱張量B旋轉的效果,因此Q的物理意義在于渦結構中不僅要求存在渦量(反對稱張量B),更進一步要求反對稱張量B要能克服對稱張量A所代表的變形效果。

(9)

(10)


(11)

1.2.2λ2方法
Jeong和Hussain[7]在忽略不可壓縮Navier-Stokes方程中的非定常和黏性項的條件下,同樣將速度梯度張量分解為對稱部分A和反對稱部分B,經過推導得到A2+B2=-(p)/ρ,其中p代表壓強,ρ代表密度。當對稱張量A2+B2存在兩個負的特征值時,壓強在由這兩個負特征值對應特征向量組成的平面內為極小值。如果將特征值按λ1>λ2>λ3排列,A2+B2存在兩個負特征值,等價于λ2<0,因此該方法稱為λ2方法。在λ2方法中,將渦定義為λ2<0的區域。但λ2方法假定流體不可壓,又忽略了非定常項和黏性項,當流場存在較強的非定常和黏性效應時,不可能準確找到渦結構。同樣λ2也是標量,并且為拉壓剪切所污染。
1.2.3Δ-判據
對于3×3的矩陣而言,其特征值大致存在兩種情況:(1)三個實特征值,(2)一個實特征值和一對復共軛特征值。這完全取決于Δ。 如果Δ≤0,則v的三個特征值均為實數,而如果Δ>0,則v有一個實特征值和一對復共軛特征值。這里,

(12)

Chong[8]等人根據臨界點理論,定義渦為速度梯度張量v存在一對復共軛特征值的區域。當v有一對復共軛特征根時,代表瞬時的流線具有閉合的或者螺旋型的形式。對于不可壓縮流動時,P=0,則進而有Δ=(Q/3)3+(R/2)2。此時,如果Q>0,那么顯然有Δ>0,即Q判據為渦的地方,Δ方法也會判定為渦。但如果Q<0,仍有可能Δ>0,即Q判據不是渦的地方,Δ方法可能判定為渦。顯然,Q方法和Δ方法并不等價,也可以理解為Q>0區域是Δ>0區域的一個子集。這里必須說明,Δ-判據是一個數學判據,在判斷渦區非渦區,應當說是不可違背的準則。也就是渦區必須是Δ>0,但用Δ的大小度量渦的強度,就沒有充分理由。Liutex其實在渦區判別與Δ-判據是一致的,也就是Liutex>0,Δ>0; Liutex =0,Δ≤0。
1.2.4λci-判據
λci方法是對Δ方法的進一步發展,當v有一對共軛實特征值時(即Δ>0),設其特征值為λ1=λr,λ2,3=λcr±iλci,對應的特征向量分別為v1=vr,v2,3=vcr±ivci,則v可以分解為:

(13)

1.3 第二代渦顯示方法的問題
渦是一個流體做旋轉運動的自然現象,應該有方向有大小,是一個矢量。但所有的第二代渦識別方法都是標量,標量有大小無方向,原則上講標量不能用來代表矢量,也就是第二代渦識別方法不可能給出渦的完整信息。由于是標量,在使用第二代渦識別方法時需要一個人為給定的閾值,而這個閾值對于渦結構的顯示具有重要影響。Q>QThreshold實際上是Q>0的一個子集,顯然取不同的QThreshold代表不同的子集,它們各不相同。換句話說不同的閾值會得到不同的渦結構。例如,將Q方法應用到邊界層轉捩直接數值模擬結果時,使用較大閾值Q=0.024會導致渦結構相互分離,或者習慣叫渦破碎,如圖4(a)所示;而使用較小閾值Q=0.002得到的渦結構是連續的,即未發生渦破碎,如圖4(b)所示。這一閾值問題在Q、λ2、Δ和λci方法中均存在,并且在實際應用中閾值的選擇需要根據問題的不同進行調節,甚至同一問題不同時間也要進行調節。由于第二代渦識別準則是標量,工程中只有用等值面來代表渦的結構,這就需要取一個合適的閾值,但閾值的選取具有隨意性,所得到的結果也不盡相同,進而可能得到不同的物理結論。

(a) 取較大閾值Q=0.024時,發生渦破碎
如上所述,Q把拉伸壓縮、變形剪切都當作渦強度的一部分,λci把剪切當成渦強度一部分,其他第二代方法也受到不同程度的拉壓剪切污染,加之是標量不是向量,都存在閾值問題。 當我們改變拉伸壓縮,Q、Δ和λ2值都會改變,但Liutex和λci不變。如果我們改變剪切,Q、Δ、λ2、λci都會改變,但Liutex不變。第二代方法不能定量表示渦,所以第二代渦識別方法不可能準確地識別渦的結構 (見圖5a和圖5b)。

圖5 第二代渦識別法把流體剪切當成渦強度一部分 (Pushpa, CNSM Report, 2019)Fig.5 Mistreatment of shearing as vortex strength by the second-generation methods
1.4 Omega 渦識別方法
為了克服第二代渦識別方法存在的問題,從2013年開始,UTA團隊開始探索新一代渦識別方法。2016年Liu等人[10]提出了Ω渦識別方法,首次提出了將渦量進一步分解為旋轉部分和非旋轉部分的概念,并克服了第二代渦識別方法需要人為調節閾值的問題。
1.4.1Ω渦識別方法
很明顯,渦量ω不能代表流體的旋轉運動。因此應將渦量ω進一步分解為旋轉部分和非旋轉部分,即:
ω=R+S
(14)
其中R代表旋轉部分渦量,S代表非旋轉部分渦量,即純剪切。通常而言,R和ω的方向不同。這里引入一個參數Ω,代表旋轉部分渦量大小占總渦量大小的比例,計算公式為[10]:

(15)
在實際使用中,為了防止分母為極小數時誤差極大問題,在上式的分母項加上一個小的正數ε,這樣Ω的表達式變為:

(16)

1.4.2Ω渦識別方法的優勢
因為Ω是一個正則化的標量,它有幾個非常明顯的優點:1) 簡單易行;2) 物理意義清晰(渦量大于變形);3) 無量綱;4) 對閾值不敏感(調節閾值Ω=0.52~0.65,渦結構變化不大);5) 能同時捕捉到強渦與弱渦。最后一點非常重要,比如Q方法,對強渦和弱渦共存的算例,如果閾值太大,弱渦一掃而空;如果閾值太小,弱渦能發現,但渦結構變得模糊不清。Ω方法對閾值不敏感。
1.4.3Ω渦識別方法和Q方法的關系
很明顯,Ω渦識別方法仍然用對稱張量反對稱張量,應當說它還是屬于第二代渦識別方法,只是它對閾值不敏感,能同時捕捉到強渦和弱渦,從這個意義上講,Ω渦識別方法是第二代渦識別方法中最好的方法,這一個方法可以替代所有其他的第二代渦識別方法。它的一個特例就是Q方法:


(17)

可見這時二者完全等價。當然,我們不會取Ω=0.5,也不會取ε=QTheshold,這兒只是想說明Ω渦識別方法可以代替Q方法,但Q方法不能代替Ω渦識別方法。比如:

(18)

(19)
不能寫成Q≥QTheshold,因為右端項是變量,但QTheshold是人為給定的一個常數。
2 流場中的主坐標系
2.1 速度梯度張量和Cauchy-Stokes分解
非均勻流場中任意一點在特定坐標系(x,y,z)下可生成一個速度梯度張量,也就是一個3×3矩陣,根據Cauchy-Stokes分解,這個矩陣可以分解為一個對稱張量和一個反對稱張量:

(20)

(21)

(22)
根據渦量或者速度向量的旋度定義,ω=×v,反對稱張量可進一步寫成:

(23)
而對稱張量可寫成:

(24)
傳統的流體力學認為渦量就代表流體旋轉,所以流體微團運動可以分解為平移、變形和旋轉。對稱張量代表變形,包括拉伸、壓縮、對稱形變,反對稱張量代表旋轉。或者Helmholtz速度分解等價于Cauchy-Stokes張量分解。這個概念依然出現在幾乎所有流體力學教科書上,成為經典流體運動學的基礎。仔細分析就會發現它的致命缺陷:1) Cauchy-Stokes張量分解顯然與坐標有關,也就是不同的(x,y,z)坐標會得到完全不同的A和B;2) 盡管ω=×v是伽利略不變量,不同的坐標(ωx,ωy,ωz)完全不同;3) 沒有任何證據顯示渦量ω代表流體旋轉(對于剛體是對的,對流體不對)。進一步分析,A是對稱張量,有三個實特征值λ1、λ2、λ3,與此對應的三個正交的實特征向量(r1,r2,r3),如果用這三個特征向量作為坐標,可以構成一個正交矩陣Q=(r1,r2,r3),在舊坐標系(x,y,z)下,v=A+B,
在新坐標系(r1,r2,r3)或者(X,Y,Z)下,這個速度梯度張量變成V=QTvQ,它可以得到一個新的Cauchy-Stokes分解:
V=QTvQ
=QT(A+B)Q
=QTAQ+QTBQ

(25)
很明顯在這個坐標系下,對稱張量只有拉伸壓縮,沒有變形。但是顯然對稱張量必然含有變形,反對稱張量必然含有剪切。否則剪切和變形哪里去了?反對稱張量能代表轉動嗎?這給我們一個嚴肅的啟示,我們必須找到一個唯一的坐標系,本文稱之為主坐標系, 在這個主坐標系下進行張量分解才有意義,才唯一,才能代表流體運動的分解。Cauchy-Stokes分解顯然依賴坐標系,不唯一,不是伽利略不變量。
2.2 伽利略不變性
我們要找到一個變量顯示渦,必須要求它具備伽利略不變,就是在新的平移、勻速運動或者勻速轉動坐標(慣性坐標系)下,這個變量方向和大小不變。很明顯速度不是伽利略不變量,因為在不同慣性坐標系下速度的大小和方向都會變,所以不是伽利略不變量,而是伽利略變量,其附帶生成的流線和跡線都不是伽利略不變量,不能用來表示渦。渦量是一個伽利略不變量,在不同慣性系中大小和方向不變。這主要歸功于dv=v·dl是伽利略不變量,因為在新舊坐標系有以下關系dL=QT·dl,V=QTvQ, dV=V·dL=QTvQ·QT·dl=QTv·dl=QTdv。但如上文所述渦量并不代表流體旋轉。
2.3 轉動張量和坐標旋轉
2.3.1 二維旋轉矩陣



圖6 二維旋轉矩陣Fig.6 2-dimensional rotation matrix
2.3.2 三維旋轉矩陣
三維旋轉矩陣比較復雜,但我們的主坐標系第一步就是把z軸轉到v的實特征向量方向:

(26)
這里Q=Qx(α)Qy(β)Qz(γ),QQT=I。
其中Z軸就是v的實特征向量,vr3=λ3r3,Z軸與r3平行。
v作為一個3×3 矩陣,其特征值方程|v-λI|=0可求出三個特征值。由于特征值方程是三次多項式,只有兩個可能,一個是三個實特征值λ1、λ2、λ3,另一個是一個實特征值、兩個共軛復特征值,可以寫成:λcr+iλci,λcr-iλci,λr。無論如何,至少有一個實特征值λr,對應有一個實特征向量r。三個實特征值情況,都可用坐標旋轉正交變換變成下三角陣,按照Liu[12]的定理一個零一個方向不轉,兩個零兩個方向不轉,三個零三個方向不轉,就不存在流體轉動,或者無渦區,不在我們考慮范圍內。

(27)
由于本文只是研究渦,在這里只考慮渦區,也就是只考慮一個實特征值、兩個共軛復特征值的情況。對于主坐標系,首先把原坐標通過三維旋轉,使新坐標系的Z軸與實特征向量r平行:

(28)
這里及下文所提到的特征向量都是指單位向量,并且人為約定ω·r>0。
2.3.5 二維坐標系下的旋轉
新坐標系的Z軸已經唯一確定,就是v的實特征向量r,但是在與Z軸垂直的X-Y平面,坐標軸需要唯一確定,這就需要在二維平面X-Y中的P旋轉:
Vθ=PTVP

(29)




(30)
這是由于Q和P旋轉都是正交變換,特征值不變,Vθ和v特征值相同。也就是λr、λcr+iλci、λcr-iλci或者λ1、λ2、λ3在(x,y,z)、(X,Y,Z)、(Xθ,Yθ,Z)不同慣性坐標系中,值都一樣。
2.3.6 三維轉動的判別
在Q旋轉和P旋轉以后,我們已得到主坐標系下的速度張量:
物理上的轉動完全由左上角二維矩陣非對角元素決定(圖7),對角元素只代表拉伸或者壓縮,

(31)



這個物理判斷與數學判斷(見Chong and Perry 1990[8])是完全一致的,即2×2矩陣有兩個實特征值則流體不轉,如果有兩個共軛特征值則流體轉動。這個二階矩陣的特征值方程為:

(32)





主坐標系中的速度梯度張量變為:

(33)

兩個未知量可以由兩個方程求解:
(R/2+ε)-(-R/2)=ω·Z=ωZ

(34)
注意到渦量ω和特征值λr、λci都是慣性系下的伽利略不變量,已經在原坐標系(x,y,z)下求出。求解這兩個方程,很容易得到,
這里ωZ=×v·r。

(35)
寫到這里大家會覺得有些麻煩,又是Q旋轉又是P旋轉。其實R由渦量ωZ和λci唯一確定,ωZ和λci都是慣性系下的不變量,由原始坐標(x,y,z)唯一確定,我們并不需要Q旋轉和P旋轉。這樣我們已經得到在主坐標下的速度梯度張量:
(36)
它是唯一的,只有根據它來進行張量分解和速度分解才是唯一的。傳統的經典的Cauchy-Stokes 張量分解都是與坐標有關,不是伽利略不變量,是不唯一也不合理的。

有剪切無轉動
3 Liutex定義和主坐標系下的速度梯度張量和渦量分解
3.1 速度梯度張量分解
=R+NR
(37)
右端第一項代表剛性旋轉張量,第二項有三個實特征值代表不轉張量。不轉張量部分可以進一步分解:

=C+D+S
不轉張量可進一步分解為拉伸壓縮C、對稱變形D和反對稱剪切S。 這個分解是在主坐標系下的分解,主坐標軸是唯一的,所以這個分解是由原始速度梯度張量v唯一確定,是伽利略不變量,但是所有其他分解,包括Cauchy-Stokes分解顯然與坐標軸選擇有關,是不可靠和沒有道理的。
3.2 Liutex定義
由主坐標系下速度梯度張量分解可見,一個剛性旋轉部分可以從速度梯度張量中分解出來,這也代表流體運動可以分解為一個剛性轉動部分和完全不轉部分(拉伸壓縮、變形和剪切)。 2017年Chaoqun Liu首次系統性地提出了如何從流體運動中提取剛體旋轉運動部分,并將渦量的旋轉部分命名為Rortex向量,2018年12月Rortex向量更名為Liutex向量,其嚴格推導過程及定義可以參見文獻[12-13]。本世紀有關速度梯度張量進一步分解的思想有不少人研究,有人有類似思想[26]。
定義:Liutex定義為流場中當地流體運動的剛性轉動部分,其方向是速度梯度張量的實特征向量,代表當地轉軸,其大小是剛性轉動的角速度,其顯式公式為:R=Rr。這里,

(38)
r是v的實特征向量:v·r=λrr,ω=×v。
由于特征向量r有兩個方向,我們定義ω·r>0。
這個顯式公式首先由Wang等人給出[25]。Liutex方向為當地轉軸也是很明顯的,如果Z是轉軸,沿Z只有

這個物理量Liutex,它是一個向量,有方向,有大小,代表流體剛性轉動,方向就是當地轉軸,大小就是流體轉動強度,Liutex和渦(Vortex)形成了一一對應關系。Liutex是一個數學定義,Vortex 是一個自然現象,我們終于找到一個物理量Liutex代表流體旋轉,或者旋渦。這就好像冷熱是自然現象,但溫度是一個物理量,溫度高低可以代表熱和冷一樣,Liutex能代表流體轉動快和慢。由于渦原先沒有定義,所謂Vortex Dynamics, 其實是Vorticity Dynamics,但“渦”(Vorticity)不是“渦”(Vortex)。湍流由無數渦組成,但描述渦需要有一個物理量,它就是Liutex。
3.3 Liutex 存在性、唯一性、穩定性和伽利略不變性
3.3.1 Liutex的存在性
根據以上定義,Liutex定義為:
R=Rr
Liutex方向的存在性來自實特征向量的存在性:如果3×3矩陣存在1個實特征值和2個共軛復特征值,實特征向量存在且對應實特征值。Liutex的存在性由定義確定(見公式(38))。
3.3.2 Liutex 的唯一性
Liutex方向的唯一性來自實特征向量的唯一性:如果3×3矩陣存在1個實特征值和2個共軛復特征值,表明矩陣具有3個不同的特征值,因此單位特征向量加上ω·r>0的要求,其方向是唯一的。Liutex的唯一性來自剛性轉動(P旋轉最小值)的唯一性。存在性和唯一性也可以由矩陣的Real Schur Decomposition[12]證明。根據Schur Decomposition,任何3×3矩陣都可以通過Unitary(實空間是正交)變換成唯一的Hessenberg矩陣,也就是:
3.3.3 Liutex 穩定性
根據我們主坐標系定義,任何渦點速度梯度張量矩陣(一個實特征值、兩個共軛復特征值)可寫為:
=R+NR
(39)
我們先考慮二維問題,三維是類似的。如果我們任意加一個2D擾動,
=R+NR
(40)
該點仍然是渦點,而且轉動強度未變。如果
=R+NR
(41)
由于是擾動,E21?R/2, 該點還是渦點, 不過轉動強度略有減弱。要讓該點不轉,不是渦點,必須E21≥R/2,那就不是小擾動了。如果取其他擾動,比如E11、E22, 不改變旋轉強度。總之只要|Eij|?R/2,該點還是渦點, 換句話說,Liutex或者流體轉動是十分穩定的,不受外界小擾動影響。外界的小擾動不能讓渦點(轉動點)變為非渦點。
3.3.4 Liutex的伽利略不變性
伽利略不變性很重要,我們必須保證渦定義在所有慣性坐標系保持不變,比如渦量、Q、λci,都是伽利略不變量,但速度不是,所以依賴于速度的流線或者跡線不能用來直接描述渦,因為不同坐標系下看流線或者跡線完全不一樣。伽利略變換包括勻速平移或者轉動,也就是:

(42)

在新的坐標系下:

(43)
=λrQcr
=λrr′
(44)

由于渦量和λci都是伽利略不變量,所以Liutex強度也是伽利略不變量[27]。其實Omega也是伽利略不變量[28]。
3.3.5 原始坐標下的張量分解和渦量的RS分解
我們前面已提到得到Liutex定義和主坐標下的速度梯度張量分解并不需要Q旋轉和P旋轉,因為渦量、Liutex、特征值都是伽利略不變量,從而我們可以直接從原始坐標下速度梯度張量


(45)
=R+NR
(46)
這個在原始坐標下的張量分解是唯一的。同樣我們可以對渦量進行唯一的轉動和剪切分解,或者渦量的RS分解:


=R+S
(47)
B·dl=ω×dl=R×dl+S×dl
ω=R+S
(48)
這就是Liu[10,18]提出的Vorticity的Liutex和剪切分解(圖8)。從上式明顯可見,我們不能用Vorticity去代表流體旋轉,只能用張量R代表旋轉,S代表不轉的反對稱剪切。在大多數情況下S是ω的主要組成部分,R(流體旋轉)遠遠不是渦量ω。
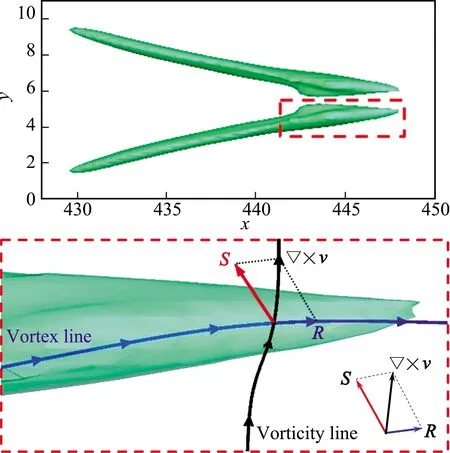
圖8 渦量的RS向量分解(早期流動轉捩)[12]Fig.8 RS decomposition of vorticity (early transition stage)[12]
4 Liutex 為基礎的幾個渦識別方法
4.1 Liutex向量線
由于Liutex是一個向量,首先可以考慮用向量線來表示渦結構(圖9~圖10),這一點是Q、λci等第二代方法無可比擬的。因為第二代方法都是標量,它們沒有對應的向量,只有用等值面來顯示渦結構,這樣渦結構完全由閾值決定,也就是一個閾值會給出一個渦結構,不同閾值給出不同渦結構。而如何判斷閾值合適不合適,沒有標準,只有以經驗為準,誰也解釋不了它們是合適還是不合適的閾值。如同流線用來描述流場一樣,Liutex線可以用來描述Liutex場,或者渦場。顯然這些Liutex線可以用來描述流場中的渦結構。

圖9 層流轉捩Λ渦與Liutex線[11]Fig.9 Λ vortex and Liutex lines in a laminar-turbulent boundary layer transition[11]

(a) 渦環
4.2 Liutex等值面
和Q一樣,Liutex大小R也是一個標量,可以用Liutex等值面來表示渦結構 (圖11)。這就又要用到閾值,但與第二代不同之處是R代表剛性旋轉,不會被拉壓和剪切所污染,R本身就是一個物理量,是當地流體旋轉角速度的兩倍,或者流體旋轉的強度,下面三個圖是用Liutex等值面畫的早期層流流動轉捩。 其圖與Q法畫出的渦結構類似,但注意到Liutex 等值面和Liutex向量線大致平行,換句話說,Liutex等值面上的Liutex向量方向和等值面方向一致(圖12和圖13)。Q無法對比,因為它是標量。渦量線和渦量管與Liutex 等值面(渦面)也完全不同(圖14)。

圖11 流動自然轉捩的 Liutex等值面[12]Fig.11 Liutex iso-surfaces in flow transition (R=0.06)[12]

(a)

(a)
4.3 Liutex-Omega渦識別方法
前面我們已經介紹了Omega方法的若干優點,但是它還是基于Cauchy-Stokes分解的對稱、反對稱速度梯度張量分解,屬于第二代渦識別方法,但比其他第二代渦識別方法更好,最主要是可代表渦的相對強度,對閾值不敏感,并可以同時捕捉到強渦和弱渦。這一點特別重要,尤其是在強渦、弱渦共存的情況下如何能捕捉到弱渦就顯得特別重要。很自然地會想到如何把Liutex方法和Omega方法的思想結合起來,這就產生了Liutex-Omega[14-15]渦識別方法。簡單推導如下。根據主軸下的張量:

(a) 渦管
=A+B
(49)
和原始Ω的定義:

(50)
但是正如前面已經介紹的,(ξ2+η2)代表剪切,不應當用來度量流體轉動或者渦強度,從而新的相對渦強度應當不含有剪切,這就得到了新的Liutex-Omega渦識別方法:

(51)


或者用另一種表達式:

(52)


(a) Q=0.005
4.4 渦核(Liutex Core)定義和識別
以上各種渦顯示方法都有一個致命缺點,就是不唯一,與閾值有關,即使Liutex-Omega方法也沒有完全擺脫閾值。同時物理上的旋渦是有旋轉軸的,前人嘗試找渦核轉軸均未獲得成功。許多人嘗試找到渦量極值,但那不是渦心。找Q極值,但一調大Q閾值,所有弱渦渦心一掃而空。 當提出Liutex向量后,使得尋找渦心變為可能。Liu等[19-20]在2019年提出渦的轉動核心定義,它是一條特殊的Liutex線,滿足:
R×r=0, 并且R>0
(53)
dR=R·dl=0
因為R的等值面上R不變,dR=0, 這就導致R和等值面垂直,到處一樣,但是在渦心處,等值面退化為一根線,等值面不再存在,R·r≠0, 二者平行。其實R是一個向量,直指R極值或者渦心,不論從哪兒起始,R線總是向渦心跑,直到渦心與r平行,這根Liutex線就是渦核中心或者轉軸,它是唯一的,與閾值毫無關系。圖16顯示各處R線都向渦核中心跑,渦核中心就是渦的轉軸。
根據Liutex的渦核中心定義,高[19]等用手動方法找到流動早期轉捩的渦核中心結構(圖17)。徐[20]等進一步根據Liutex的渦心定義,通過找到許多種子點,用計算機自動畫出流動轉捩的渦核結構(圖18)。
5 渦的六大要素和Liutex為代表的第三代渦識別方法
自然界的渦有六大要素:1) 渦的絕對強度;2) 渦的相對強度;3) 當地旋轉軸;4) 渦核中心位置;5) 渦核大小;6) 渦邊界。第一代渦識別方法用渦量來描述渦結構。第二代渦識別方法當閾值接近零的時候能給出渦的大致邊界,但因為它們都是標量,但渦有軸,是矢量,標量怎么能顯示矢量?更為嚴重的是,它們都把拉壓剪切當作流動旋轉強度的一部分,或者被剪切嚴重污染。渦量大的地方流體轉動強的結論不對。Q大的地方轉動強,對復雜渦結構常常也不正確。而Ω渦識別方法和基于Liutex渦定義的第三代渦識別方法基本上回答了這六大要素的問題。

(a) R線和渦核


(a) Top view
1) 渦的絕對強度即為Liutex的大小R,代表當地流體剛性旋轉運動部分旋轉角速度的二倍。根據以上討論,Liutex的大小能夠度量當地流體剛性旋轉運動部分的絕對強度的物理量[13]。
2) 相對強度可以用Liutex-Omega衡量,它類似流體中Liutex的濃度或者流體的剛度。實際上,相對強度往往比絕對強度的更加重要,就像相對誤差往往比絕對誤差更重要一樣。在復雜流場中,有可能存在轉速為1000 rps的強渦和10 rps的弱渦,這時使用100 rps作為閾值,就會導致10 rps的弱渦被完全忽略。而使用相對強度,即Liutex-Omega可以同時捕捉到強渦和弱渦,對閾值不敏感。
3) 當地旋轉軸就是Liutex向量的方向r,也就是速度梯度張量v的實特征向量。渦的一個重要信息旋轉軸在第二代渦識別方法中被忽略掉了,而第一代渦量也是向量,但一般不是當地流體的轉軸,渦量和渦兩個矢量往往有兩個完全不同的方向,而Liutex永遠和渦有完全相同的方向。Liutex向量唯一地提供了當地旋轉軸信息。
5) 渦核的大小可以按照從渦核處相對強度減少至渦核處的95%來確定,這是經驗值,不能作為精確定義。由于流場中,存在強度不同的渦結構,使用Liutex-Omega方法可以同時顯示強渦和弱渦,并利用其相對強度由渦核處減小至95%來定義渦核的尺寸。這樣強渦和弱渦可以同時顯示。
6) 渦的邊界由旋轉區域和非旋轉區域的交界面來定義,一般要選取一個閾值,比如Ω=0.52,Q>QThreshold,等等。這一點所有渦識別方法在閾值很小的時候,都能給出渦的大致邊界,這是因為根據Chong-Perry[8](1990),渦內點必須滿足速度梯度張量有一實兩虛特征值。
回顧歷代渦識別方法,第一代渦識別方法不能回答渦的六個要素問題。渦和渦量是兩個不同的概念,使用渦量沒有辦法正確地識別渦結構,更不可能給出正確的渦核和渦邊界。第二代渦識別方法通過針對具體問題選擇合適的閾值,Q、λ2、Δ和λci等能夠給出近似的渦邊界,但作為標量,無法給出當地旋轉軸信息,渦結構完全依賴于閾值選擇,其大小被拉壓和剪切污染,也不能準確代表渦強度。表1給出了三代渦識別方法所能夠提供的信息對比,可以看到只有第三代渦識別方法給出了渦六大要素的全部信息。
6 湍流邊界層的Liutex相似律(-5/3冪次相似律)
1941年前蘇聯數學家Kolmogorov給出了著名的三大假說兩大相似律,提出大雷諾數條件下湍流局部均勻各向同性假定,并建立了被視為現代湍流研究開端的K41理論。作為K41理論王冠上最閃耀的一顆明珠,Kolmogorov預言的湍動能譜-5/3冪次律在大約十年后被許多實驗所證實,被認為是湍流研究歷史上最大的成功,也是唯一被學者廣泛接受的湍流理論。然而,湍能譜的-5/3冪次律是在不可壓縮、均勻、各向同性和慣性子區無黏的假定下得到。在實際流動中,尤其是在中低雷諾數條件下的邊界層,所謂慣性子區不可能無黏,Kolmogorov這些假定往往不能滿足。DNS和實驗都廣泛報道結果與Kolmogorov的-5/3定律相差甚遠。團隊[21]用高精度DNS研究層流邊界層轉捩和低雷諾數湍流時(Reθ≈1000)時發現,Liutex向量大小的能譜與-5/3冪次律吻合較好,相反湍能譜只有在很小的波數(頻率)范圍內才微弱滿足-5/3冪次律,如圖19所示。

表1 三代渦識別方法對比Table 1 Comparison of three generation of vortex identification method

(a) Liutex譜 (b) 湍能譜
Liutex的-5/3冪次律之所以具有更普遍的適用范圍,是因為Liutex向量代表流動中的剛性旋轉部分,而剛性旋轉部分的速度梯度無剪切、無黏性耗散,因而不受黏性的影響,從而獨立于雷諾數。因此Liutex在中低雷諾數下的湍流小尺度結構仍然符合相似律。但如果對Vorticity和Q等第二代渦識別方法做頻譜分析,它們都不具備相似律,與-5/3冪次律相距甚遠。這一發現不僅增進了人們對湍流物理的認識,同時對建立更普適的亞格子模型具有重要的意義。
7 結論和展望
渦是一個自然現象,更是湍流的組分和肌腱,但長久以來沒有明確定義,這也是渦科學和湍流研究長期進展緩慢的重要原因之一。
第一代渦識別方法用渦量來代表渦,盡管為幾乎所有教科書采用,但無數工程計算和實驗都證明,不能用渦量、渦線、渦面、渦管來顯示渦結構。
以Q方法為代表的第二代渦顯示方法取得一些成功。但渦是向量,有方向,有大小,有轉軸,但第二代全是標量,標量無法代表向量,第二代只有取閾值、用等值面來顯示渦結構,從而渦結構依賴于閾值,導致渦結構隨意化和不唯一。在復雜渦結構流場中由于閾值選取不當,弱渦常常被抹去。如果減小閾值,弱渦可能找回,但全流場渦結構變得模糊。更為嚴重的是第二代往往把拉伸、壓縮和剪切當作渦強的一部分,也就是被拉壓、剪切污染,不能用來度量流體旋轉強度。因而從科學研究角度講,第二代渦識別方法也不能用來顯示渦結構。
經過長期努力,UTA團隊找到物理量Liutex代表渦,它是一個向量,能夠用來描述流體轉動,也就是渦的方向和強弱。它的方向就是當地流體轉動的方向,其實就是當地速度梯度張量的特征向量,它的大小就是當地流體剛性旋轉的角速度的兩倍。以Liutex為代表的渦定義和第三代渦識別方法,能夠正確地代表、顯示和度量渦。渦有六大基本要素,以Liutex為基礎的渦定義和第三代渦識別方法,包括Liutex向量、Liutex向量線/面/管、Liutex等值面、Liutex-Omega等值面、Liutex-Core Lines能夠全面地正確地回答渦的六大要素。
更為重要的是Liutex代表流體轉動,渦量不能代表流體轉動,這就要改變對流體運動認識近兩百年的誤解。傳統的流體運動學中對Helmholtz速度分解和Cauchy-Stokes張量分解而言,渦量就是流體轉動強度,反對稱張量代表流體旋轉,這些傳統概論都必須要重新審視。由于主坐標系概念的引入,基于Liutex的渦量RS分解,基于Liutex的流體轉動拉壓剪切變形的張量分解,都是與坐標無關的,它們給出了唯一的伽利略不變的張量分解。希望Liutex這個新物理量的引入,能對流體動力學發展產生影響,使湍流理論從定性研究逐步向定量研究發展。
需要第三代渦識別方法程序,可以訪問https://www.uta.edu/math/cnsm/public_html/cnsm/cnsm.html免費下載。
致謝:感謝UTA數學系長期的支持。感謝美國德克薩斯州先進計算中心(TACC)長期提供DNS計算機時。感謝UTA團隊的王義乾、高宜勝、劉劍明、董祥瑞、許文倩,以及合作者徐弘一、蔡小舒、閻永華、楊勇、楊光、閆盼盼等人。此外,還要感謝JournalofHydrodynamics周連第執行主編的多次討論,并提出渦的六大要素。
