基于MSFLE與Liutex的渦合并實(shí)驗(yàn)研究
2020-08-08 02:39:34郭延昂董祥瑞蔡小舒
空氣動(dòng)力學(xué)學(xué)報(bào) 2020年3期
關(guān)鍵詞:測(cè)量實(shí)驗(yàn)
郭延昂, 董祥瑞, 蔡小舒,*, 周 騖
(1. 上海理工大學(xué) 顆粒與兩相流測(cè)量研究所, 上海 200093; 2. 上海市動(dòng)力工程多相流動(dòng)與傳熱重點(diǎn)實(shí)驗(yàn)室, 上海 200093)
0 引 言
渦是湍流邊界層擬序結(jié)構(gòu)的核心,影響條帶、猝發(fā)、上升流、下掃流等其它擬序結(jié)構(gòu)的發(fā)展和演化[1],著名空氣動(dòng)力學(xué)家Küchemann曾說(shuō),“旋渦是流體運(yùn)動(dòng)的肌腱”[2],這句話(huà)深刻概括了渦的重要性。自從1952年Theodorsen[3]提出馬蹄渦(又稱(chēng)發(fā)卡渦)模型以來(lái),無(wú)數(shù)科研工作者致力于研究渦的相關(guān)機(jī)理。精確可靠的實(shí)驗(yàn)測(cè)量是諸多機(jī)理研究的前提與保障。目前,國(guó)內(nèi)外已發(fā)展了多種實(shí)驗(yàn)測(cè)量和流場(chǎng)可視化方法,如氫氣泡法、煙流法、染料法等。Kline等人[4]采用氫氣泡法發(fā)現(xiàn)了湍流邊界層近壁流場(chǎng)中的快慢斑和長(zhǎng)帶條結(jié)構(gòu),利用染料發(fā)現(xiàn)了猝發(fā)現(xiàn)象。Brodkey等人[5]使用示蹤粒子和立體攝影發(fā)現(xiàn)了上升流和呈手指狀的下掃流,并認(rèn)為下掃流是產(chǎn)生雷諾應(yīng)力的主要來(lái)源。Lian[6]利用氫氣泡法對(duì)不同單個(gè)流向渦進(jìn)行了研究,結(jié)果顯示流向渦的旋轉(zhuǎn)運(yùn)動(dòng)會(huì)導(dǎo)致下掃流和上升流的產(chǎn)生,流向渦結(jié)構(gòu)沿流向拉伸后會(huì)從周?chē)漳芰浚瑢?dǎo)致旋轉(zhuǎn)速度增大。雖然這些可視化方法是基于定性研究的,但因其經(jīng)濟(jì)且易于實(shí)現(xiàn),所以成為了觀察大尺度湍流結(jié)構(gòu)很好的實(shí)驗(yàn)方法[7],為人們認(rèn)識(shí)和理解湍流邊界層中擬序結(jié)構(gòu)的宏觀特性提供了很大的幫助。
隨著光學(xué)技術(shù)及計(jì)算機(jī)技術(shù)的快速發(fā)展,粒子圖像測(cè)速(particle image velocimetry, PIV)和粒子追蹤測(cè)速(particle tracking velocimetry, PTV)等得到了廣泛應(yīng)用。Adrain等人[8-10]利用PIV測(cè)量到了邊界層外區(qū)存在著沿流向排列且具有相同速度的發(fā)卡渦,它們組成了大尺度發(fā)卡渦包結(jié)構(gòu)。近年來(lái),三維(3D)測(cè)量技術(shù)得到了迅速發(fā)展。3D PIV或PTV測(cè)量的基本原理是結(jié)合多個(gè)2D PIV或PTV,采用多個(gè)相機(jī)進(jìn)行同步測(cè)量,再利用算法重構(gòu)得到3D速度場(chǎng)。如Kinzel等人[11]利用兩個(gè)具有不同空間分辨率的PTV開(kāi)展3D測(cè)量,低空間分辨率的PTV測(cè)量速度場(chǎng)及大尺度流動(dòng)特征,高空間分辨率的PTV測(cè)量與大尺度流動(dòng)特征相關(guān)的渦量和應(yīng)力等小尺度物理量。Hutchins等人[12]使用兩個(gè)成一定角度布置的相機(jī)開(kāi)展體視PIV研究,測(cè)量與流向成45°和135°平面中的渦結(jié)構(gòu),其中在135°平面中測(cè)量到了一對(duì)反向旋轉(zhuǎn)的渦結(jié)構(gòu),兩渦中間發(fā)生上噴現(xiàn)象,這與發(fā)卡渦的渦腿特征一致。將PIV與高速相機(jī)和高能連續(xù)激光或高頻脈沖激光結(jié)合,形成了時(shí)間分辨PIV(time-resolved PIV, TRPIV),可以測(cè)量流場(chǎng)隨時(shí)間的連續(xù)變化過(guò)程[13-14]。層析PIV技術(shù)可以得到瞬時(shí)三維三分量(3D3C)速度場(chǎng),已經(jīng)被應(yīng)用于測(cè)量湍流邊界層和深入分析擬序結(jié)構(gòu)機(jī)理[15-17]。如Schroder等人[15]使用六個(gè)CMOS相機(jī),采用層析TRPIV測(cè)量了與負(fù)雷諾應(yīng)力事件(Q2和Q4)相關(guān)的擬序結(jié)構(gòu)及其在湍流邊界層對(duì)數(shù)律層中的時(shí)間演化過(guò)程,研究了高雷諾數(shù)湍流邊界層中發(fā)夾渦的初始發(fā)展機(jī)理。Katz等人[18]詳細(xì)介紹了數(shù)字全息3D流場(chǎng)測(cè)量的原理和應(yīng)用。上述測(cè)量方法在定量測(cè)量3D流場(chǎng)以及研究湍流機(jī)理方面發(fā)揮了巨大作用,不過(guò)測(cè)量系統(tǒng)非常復(fù)雜,且存在測(cè)量分辨率和測(cè)量區(qū)域大小的矛盾,難以測(cè)量渦隨時(shí)空的動(dòng)態(tài)演變過(guò)程。對(duì)此,蔡小舒等人[19]提出了運(yùn)動(dòng)單幀長(zhǎng)曝光(moving single-frame and long-exposure, MSFLE)圖像法,測(cè)量系統(tǒng)簡(jiǎn)單方便,可以得到直觀的低雷諾數(shù)湍流邊界層中渦隨時(shí)空的演變過(guò)程。
除實(shí)驗(yàn)測(cè)量外,測(cè)量結(jié)果中的渦提取手段也是湍流研究的重要議題。Epps[20]對(duì)渦識(shí)別方法進(jìn)行了全面總結(jié),其中基于歐拉體系的方法有λ2[21]、Q[22]、λci[10]、Ω[23]等,基于拉格朗日體系的方法有有限時(shí)間Lyapunov指數(shù)法[24]、MZ[25]等。上述渦識(shí)別方法大都需要人為設(shè)定閾值,不同的閾值可能會(huì)得到不同的渦結(jié)構(gòu),而且不能提供渦的準(zhǔn)確定義。近幾年,劉超群團(tuán)隊(duì)基于渦的數(shù)學(xué)定義提出了一種新的渦識(shí)別方法Liutex[26-30],相比于其它渦識(shí)別方法,Liutex向量可以準(zhǔn)確表征流體旋轉(zhuǎn)強(qiáng)度及當(dāng)?shù)匦D(zhuǎn)軸方向。
綜上所述,本文結(jié)合MSFLE圖像測(cè)量法和Liutex渦識(shí)別方法對(duì)湍流邊界層渦結(jié)構(gòu)的時(shí)空演變過(guò)程開(kāi)展了實(shí)驗(yàn)研究,得到了直觀的渦結(jié)構(gòu)特征及其演化過(guò)程,并對(duì)渦合并現(xiàn)象進(jìn)行了量化分析。
1 實(shí)驗(yàn)方法及裝置
1.1 MSFLE圖像測(cè)量方法
MSFLE圖像測(cè)量方法是從單幀長(zhǎng)曝光(single-frame and long-exposure, SFLE)圖像法[31]發(fā)展而來(lái)。在SFLE測(cè)量方法中,流場(chǎng)中布撒跟隨性良好的示蹤粒子,激光器連續(xù)照明流場(chǎng),通過(guò)設(shè)置相機(jī)較長(zhǎng)的合適的曝光時(shí)間,可以將粒子的運(yùn)動(dòng)軌跡清晰地記錄在單幀圖像中。
圖像中運(yùn)動(dòng)軌跡的長(zhǎng)度代表了曝光時(shí)間內(nèi)示蹤粒子的運(yùn)動(dòng)距離,進(jìn)而可以得到流體運(yùn)動(dòng)速度,通過(guò)前后兩幀圖像可得到流體運(yùn)動(dòng)方向。示蹤粒子的運(yùn)動(dòng)速度可以由下式得到:
(1)
式中:v為示蹤粒子的運(yùn)動(dòng)速度,s表示圖像中示蹤粒子運(yùn)動(dòng)軌跡長(zhǎng)度,m為相機(jī)鏡頭的放大倍率,Δt是相機(jī)曝光時(shí)間。
相比于PIV和PTV采用兩次曝光和兩幀圖像來(lái)獲得粒子運(yùn)動(dòng)的始末位置,SFLE法采用一次長(zhǎng)曝光可以在單幀圖像中非常直觀地顯示粒子運(yùn)動(dòng)軌跡。而且SFLE法對(duì)實(shí)驗(yàn)條件要求較低,僅需較小功率的連續(xù)激光器和工業(yè)相機(jī),測(cè)量裝置簡(jiǎn)單,實(shí)驗(yàn)成本低。
通常的流場(chǎng)測(cè)量方法是通過(guò)歐拉視角研究流場(chǎng),如PIV等。在這些方法中,測(cè)量系統(tǒng)固定在某個(gè)位置,只能得到在該固定位置的流場(chǎng)信息,無(wú)法測(cè)量湍流邊界層中渦結(jié)構(gòu)隨時(shí)空演變過(guò)程。另外圖像法測(cè)量中相機(jī)視場(chǎng)和圖像分辨率是一對(duì)矛盾,采用高分辨率的相機(jī)鏡頭測(cè)量渦精細(xì)結(jié)構(gòu)時(shí),因圖像視場(chǎng)較小,無(wú)法捕捉快速運(yùn)動(dòng)的渦結(jié)構(gòu)。針對(duì)上述問(wèn)題,本文在SFLE的基礎(chǔ)上,采用MSFLE圖像測(cè)量方法,通過(guò)拉格朗日視角研究湍流邊界層中渦結(jié)構(gòu)特征及其演化過(guò)程。
MSFLE圖像測(cè)量方法具有運(yùn)動(dòng)和長(zhǎng)曝光兩大特點(diǎn)。一方面,實(shí)驗(yàn)中相機(jī)測(cè)量系統(tǒng)勻速運(yùn)動(dòng)以跟蹤捕捉到與其速度相同或相近的渦結(jié)構(gòu);另一方面,采用較長(zhǎng)曝光時(shí)間將示蹤粒子運(yùn)動(dòng)軌跡記錄在單幀圖像中,得到的連續(xù)測(cè)量圖像可以清晰反映渦結(jié)構(gòu)及周?chē)鲌?chǎng)的發(fā)展變化過(guò)程。
MSFLE是一種拉格朗日型測(cè)量方法,可得到渦結(jié)構(gòu)隨時(shí)空運(yùn)動(dòng)演變過(guò)程的直觀圖像,但得到的流體速度是相對(duì)于相機(jī)運(yùn)動(dòng)速度的相對(duì)速度。在該方法中高于相機(jī)移動(dòng)速度的流體在圖像中向下游方向運(yùn)動(dòng),低于相機(jī)移動(dòng)速度的流體向上游方向運(yùn)動(dòng),與相機(jī)基本相同移動(dòng)速度的流體結(jié)構(gòu)則在圖像中位置基本不變。這樣可以清晰地顯示出高低速流體之間的剪切作用。如圖1所示,連續(xù)拍攝的圖像清晰地顯示出相對(duì)相機(jī)運(yùn)動(dòng)速度的高/低速流動(dòng)間的剪切現(xiàn)象及渦是如何“搓”出來(lái)的。圖1(a)為低速流體(黃色)與高速流體(紅色)發(fā)生剪切的現(xiàn)象,剪切導(dǎo)致順時(shí)針旋轉(zhuǎn)渦的產(chǎn)生如圖1(b)所示。圖1直觀地顯示了渦與上下高/低速流體的聯(lián)系,即渦是由高/低速流體的剪切作用產(chǎn)生的,這正如著名流體力學(xué)家陸士嘉提出的觀點(diǎn),“流體的本質(zhì)就是渦,因?yàn)榱黧w經(jīng)不住搓,一搓就搓出了渦”,“搓”就是高/低速流體之間的剪切。
1.2 實(shí)驗(yàn)裝置
實(shí)驗(yàn)測(cè)量系統(tǒng)如圖2所示。實(shí)驗(yàn)中片光位于矩形管道展向中間位置,平行于來(lái)流并垂直矩形管道入射,以盡可能避免測(cè)量區(qū)受到管道兩側(cè)壁面邊界層的影響。實(shí)驗(yàn)測(cè)量了矩形管道底部湍流邊界層流向-法向二維平面內(nèi)的渦結(jié)構(gòu)演變過(guò)程。圖2中x軸為流向方向,y軸為法向方向,z軸為展向方向。實(shí)驗(yàn)系統(tǒng)由恒位水箱、回水箱、水泵、流量計(jì)、流量調(diào)節(jié)閥、實(shí)驗(yàn)管道、相機(jī)鏡頭、激光器和電動(dòng)導(dǎo)軌等構(gòu)成。水泵將回水箱中的水輸送至恒位水箱以保證管道入口處壓力恒定,從而確保實(shí)驗(yàn)段來(lái)流的穩(wěn)定,水流過(guò)實(shí)驗(yàn)管道之后經(jīng)流量調(diào)節(jié)閥和流量計(jì)回到水箱,形成循環(huán)。
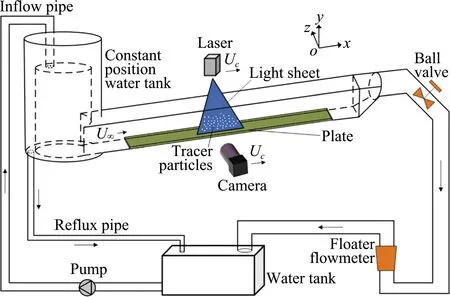
圖2 實(shí)驗(yàn)測(cè)量系統(tǒng)示意圖Fig.2 Schematic diagram of the experimental measurement system
有機(jī)玻璃實(shí)驗(yàn)管道長(zhǎng)2200 mm,管道橫截面為80 mm×80 mm的正方形。長(zhǎng)1500 mm、寬78 mm、厚4 mm有機(jī)玻璃平板水平放置在實(shí)驗(yàn)管道底部,故流體流通橫截面為80 mm×76mm的矩形,平板前緣距管道入口處700 mm,正對(duì)來(lái)流方向的平板前緣設(shè)計(jì)為半橢圓形,長(zhǎng)短軸比例為4∶1,以減少平板前緣對(duì)流動(dòng)的干擾。將直徑為4 mm的拌線(xiàn)布置于距平板前緣50 mm處以加速邊界層的轉(zhuǎn)捩。示蹤粒子選用平均直徑5 μm、比重1.04和折射率為1.584的聚酰胺樹(shù)脂顆粒(polyamide resin particle, PSP)。圖像測(cè)量系統(tǒng)由分辨率1280 pixel×1024 pixel、像元大小4.8 μm的XIMEA相機(jī),放大倍率為0.14倍的遠(yuǎn)心鏡頭和輸出1 mm厚片光、450 nm波長(zhǎng)、4 W功率的連續(xù)半導(dǎo)體激光器組成。圖像視場(chǎng)范圍為44 mm×35 mm,空間分辨率為34 μm。相機(jī)曝光時(shí)間為100 ms,幀率9.995 fps,幀間間隔50 μs,基本實(shí)現(xiàn)連續(xù)測(cè)量。
圖像測(cè)量系統(tǒng)安裝在沿流向平行布置的導(dǎo)軌上,伺服電機(jī)控制圖像測(cè)量系統(tǒng)勻速運(yùn)動(dòng)以捕捉矩形管道底部邊界層中與此運(yùn)動(dòng)速度相近的渦結(jié)構(gòu)。當(dāng)流量為1.6 m3/h時(shí),采用SFLE圖像法由公式(1)計(jì)算得到來(lái)流速度約為U∞=100 mm/s。令Uc表示圖像測(cè)量系統(tǒng)運(yùn)動(dòng)速度,U*=Uc/U∞。通過(guò)大量實(shí)驗(yàn)發(fā)現(xiàn),當(dāng)U*∈[0.8,0.9]時(shí)測(cè)量到的邊界層內(nèi)渦結(jié)構(gòu)現(xiàn)象最為豐富,這表明渦大都以這個(gè)速度運(yùn)動(dòng),故圖像測(cè)量系統(tǒng)速度在此區(qū)間內(nèi)選取。令x表示距平板前緣的流向位置,實(shí)驗(yàn)測(cè)量范圍從x=400 mm到x=1300 mm,兩個(gè)位置對(duì)應(yīng)的邊界層厚度分別為10 mm和20 mm,動(dòng)量厚度θ分別為0.97 mm和1.94 mm,基于動(dòng)量損失厚度的雷諾數(shù)分別為Reθ=θU∞/ν=97和194,其中ν為流體運(yùn)動(dòng)黏性系數(shù)。
需要指出的是本研究中得到的是3D渦結(jié)構(gòu)在流向-法向2D截面的渦特性,反映的是渦在該截面的時(shí)空演變過(guò)程。該2D時(shí)空演變過(guò)程與3D渦結(jié)構(gòu)時(shí)空演變過(guò)程密切相關(guān)。
2 基于骨架提取的圖像處理方法
從圖像獲取流場(chǎng)速度信息的圖像處理方法主要包括粒子軌跡識(shí)別和速度計(jì)算兩部分[32]。粒子軌跡識(shí)別圖像處理流程如圖3所示,由去噪銳化、自適應(yīng)閾值分割(OTSU)、去除小顆粒和骨架提取四部分組成。自適應(yīng)閾值分割算法是一種多閾值自動(dòng)分割方法,通過(guò)分析像素周?chē)植糠秶幕叶忍匦詠?lái)決定該像素點(diǎn)的閾值,不需要人為設(shè)定閾值,這樣能夠使閾值分割后的圖片保留更多信息。對(duì)圖像進(jìn)行骨架提取后粒子軌跡是單像素寬度的軌跡,即像素精度的跡線(xiàn)。可以更準(zhǔn)確計(jì)算軌跡長(zhǎng)度,且對(duì)于彎曲的軌跡也能區(qū)分各像素點(diǎn)處速度方向的細(xì)微區(qū)別,同時(shí)保持圖像的形態(tài)學(xué)特征。
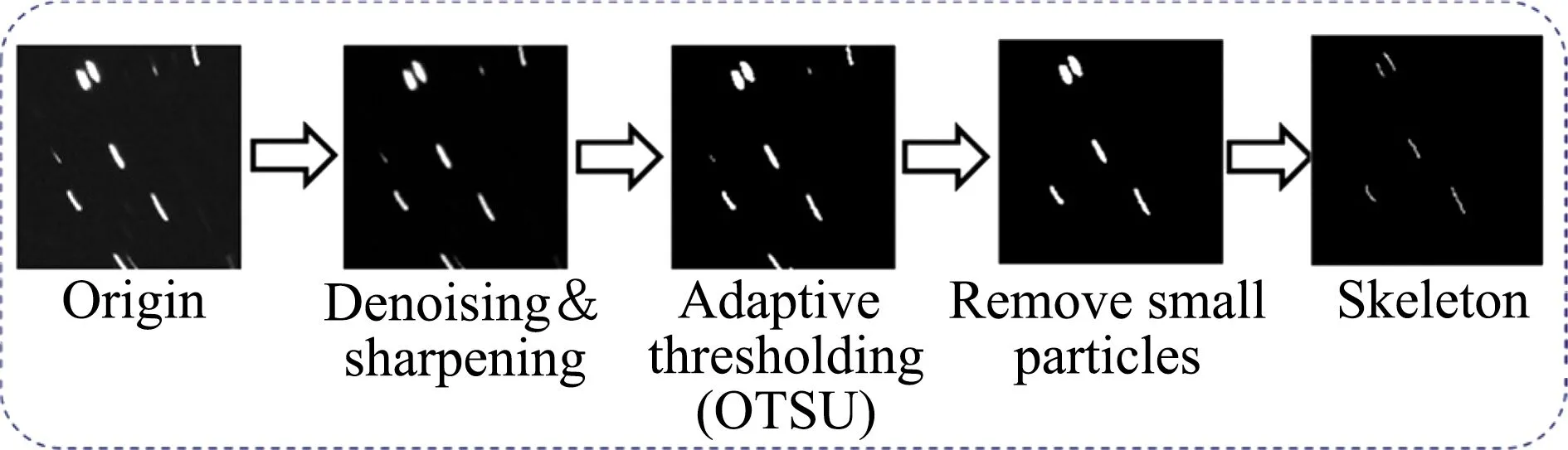
圖3 軌跡識(shí)別處理流程圖Fig.3 Process flow chart of trajectory identification
獲得像素精度的跡線(xiàn)后,通過(guò)連通區(qū)域分割函數(shù)識(shí)別出每條軌跡上的所有像素點(diǎn),傳統(tǒng)算法采用跡線(xiàn)起點(diǎn)與終點(diǎn)之間的距離作為長(zhǎng)度,在處理彎曲軌跡時(shí)會(huì)產(chǎn)生較大誤差。本文采用求線(xiàn)積分的長(zhǎng)度計(jì)算算法[32],先求出每?jī)蓚€(gè)像素點(diǎn)之間的距離,然后迭加得到總的軌跡長(zhǎng)度,兩種算法的對(duì)比如圖4所示。得到軌跡長(zhǎng)度后由公式(1)計(jì)算流場(chǎng)速度,速度方向由連續(xù)的兩幀圖像得到。
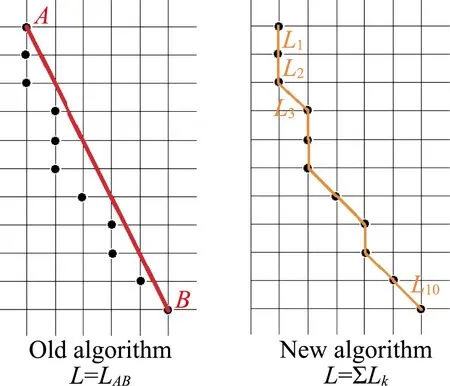
圖4 不同算法求軌跡長(zhǎng)度的對(duì)比[32]Fig.4 Comparison of trajectory length between two algorithms[32]
3 Liutex渦識(shí)別方法
通過(guò)骨架提取算法計(jì)算得到速度場(chǎng)后,要進(jìn)行渦結(jié)構(gòu)的識(shí)別。由于渦量在近壁強(qiáng)剪切區(qū)域值很大,而在渦旋轉(zhuǎn)區(qū)域較小,但不能夠表征流體旋轉(zhuǎn),本文采用Liutex理論[26-30]進(jìn)行渦的識(shí)別和表征。Liutex理論可以系統(tǒng)地描述當(dāng)?shù)亓黧w的轉(zhuǎn)動(dòng)強(qiáng)度大小及旋轉(zhuǎn)軸方向,其基本思想為:如果速度梯度張量V存在一對(duì)復(fù)特征值λcr±λci和一個(gè)實(shí)特征值λr,那么當(dāng)?shù)亓黧w旋轉(zhuǎn)軸方向即為V的實(shí)特征向量的方向,即Liutex的矢量方向。Liutex的大小與方向分別以R和r表示:
V·r=λrr
(2)
R的顯示計(jì)算公式如下:

(3)
因此,Liutex向量R被定義為R=Rr。
綜上,本文所采用的渦識(shí)別與表征方法是通過(guò)骨架提取圖像處理方法得到速度場(chǎng),進(jìn)一步使用三角剖分法進(jìn)行插值,插值大小為圖像像素?cái)?shù),之后插入第三維數(shù)據(jù),令z=1,w=0,再計(jì)算速度梯度張量,最終通過(guò)公式(3)計(jì)算得到Liutex以實(shí)現(xiàn)渦強(qiáng)度的表征。
4 MSFLE測(cè)量結(jié)果與分析
4.1 湍流邊界層實(shí)驗(yàn)驗(yàn)證
為驗(yàn)證矩形管道底部邊界層為湍流邊界層,利用SFLE方法分別測(cè)量了x=400 mm與x=1300 mm處邊界層沿法向平均速度分布。測(cè)量時(shí)片光位于展向中心處,垂直矩形管道平行來(lái)流方向布置,相機(jī)垂直片光進(jìn)行測(cè)量。對(duì)測(cè)得的瞬時(shí)速度場(chǎng)進(jìn)行統(tǒng)計(jì)分析,再根據(jù)公式y(tǒng)+=yuτ/v,u+=u/uτ將平均速度u和法向高度y用摩擦速度uτ無(wú)量綱化。摩擦速度uτ通過(guò)壁面切應(yīng)力τw獲得。τw根據(jù)黏性底層的速度梯度獲得。
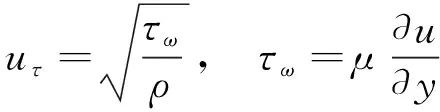
(4)
式中ρ為流體密度,μ為動(dòng)力黏性系數(shù)。最終計(jì)算得到x=400 mm處uτ=6 mm/s,x=1300 mm處uτ=5.48 mm/s。兩處邊界層法向平均速度分布結(jié)果見(jiàn)圖5,該無(wú)量綱速度分布與湍流邊界層內(nèi)層[33]速度分布公式吻合,且兩個(gè)流向位置的平均速度分布呈現(xiàn)自相似,表明在矩形管道底部的實(shí)驗(yàn)測(cè)量區(qū)域內(nèi)為湍流邊界層。
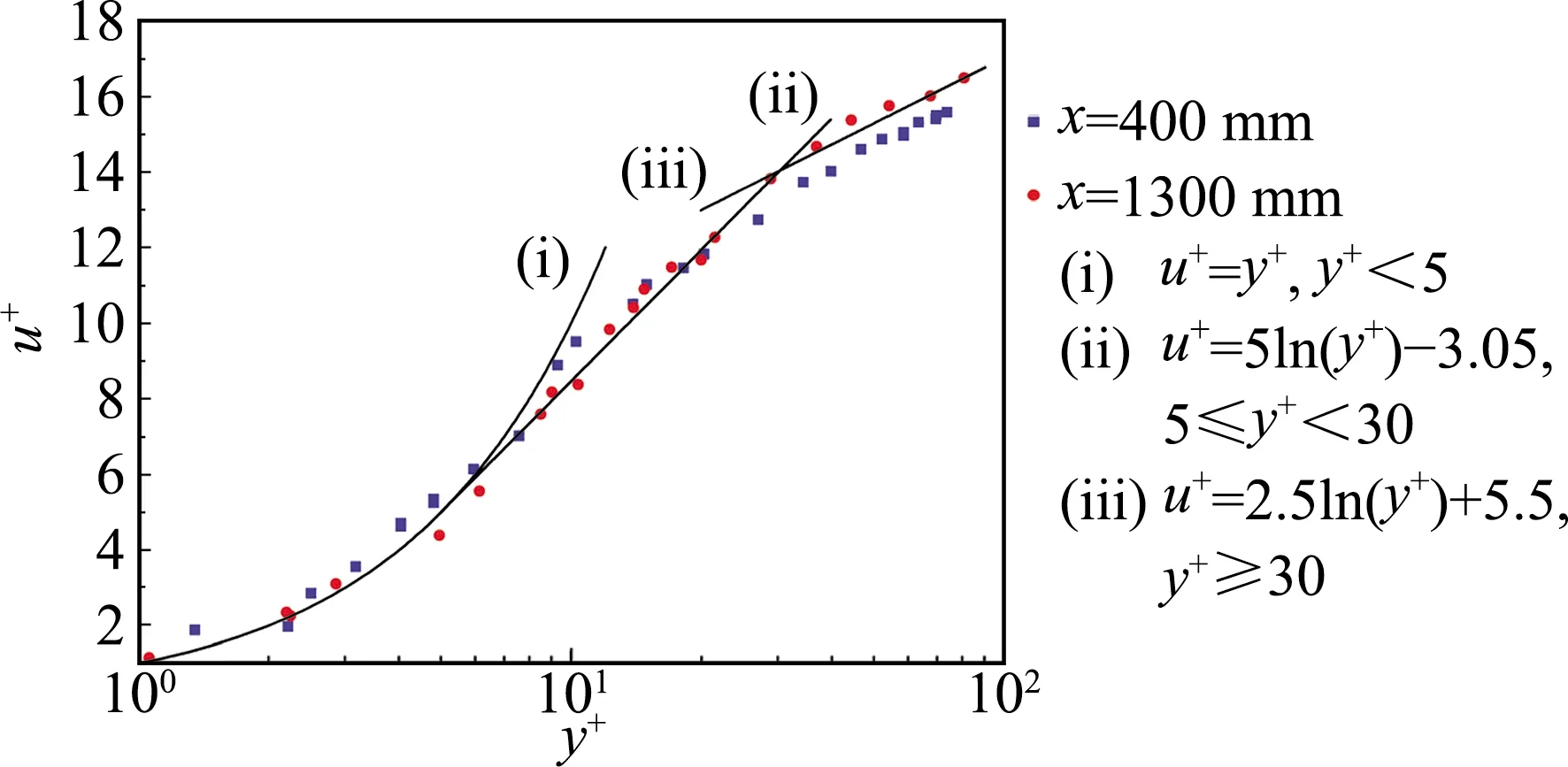
圖5 x=400 mm與1300 mm處邊界層法向平均速度分布Fig.5 Dimensionless velocity profile of experimental results at x=400 mm and x=1300 mm
4.2 渦合并結(jié)果與分析
采用MSFLE測(cè)量,獲得了在矩形管道底部湍流邊界層內(nèi)渦結(jié)構(gòu)合并的整個(gè)過(guò)程。圖6給出了其中獲得的兩對(duì)渦合并過(guò)程中的部分時(shí)刻的圖像,以及計(jì)算處理結(jié)果。其中左圖為原始圖像,中圖為圖像處理后得到的u*云圖及流線(xiàn)圖(u*=u/U∞,u為相對(duì)流向速度),右圖為計(jì)算得到的R云圖及流線(xiàn)圖。圖中橫坐標(biāo)和縱坐標(biāo)均用δ0無(wú)量綱化,δ0為實(shí)驗(yàn)初始位置(即x=400 mm)處的邊界層厚度10 mm,圖像下邊緣對(duì)應(yīng)矩形管道底層上表面,白色軌跡線(xiàn)是示蹤粒子在曝光時(shí)間下的運(yùn)動(dòng)軌跡。流體從圖像左側(cè)流向圖像右側(cè),由于測(cè)量系統(tǒng)以速度Uc勻速運(yùn)動(dòng),當(dāng)在連續(xù)測(cè)量的圖像中示蹤粒子軌跡向右側(cè)運(yùn)動(dòng)表示該處流體流動(dòng)速度大于相機(jī)運(yùn)動(dòng)速度Uc,如u*云圖中上部區(qū)域流線(xiàn)所示;當(dāng)流體速度小于Uc時(shí),示蹤粒子軌跡向左側(cè)移動(dòng),如u*云圖中下部區(qū)域流線(xiàn)所示。定義相對(duì)于Uc運(yùn)動(dòng)快慢的流體分別為高速流體和低速流體。當(dāng)示蹤粒子軌跡在圖像中僅為亮點(diǎn)時(shí),則表明該粒子為穩(wěn)定勻速運(yùn)動(dòng)狀態(tài),速度大小為Uc。
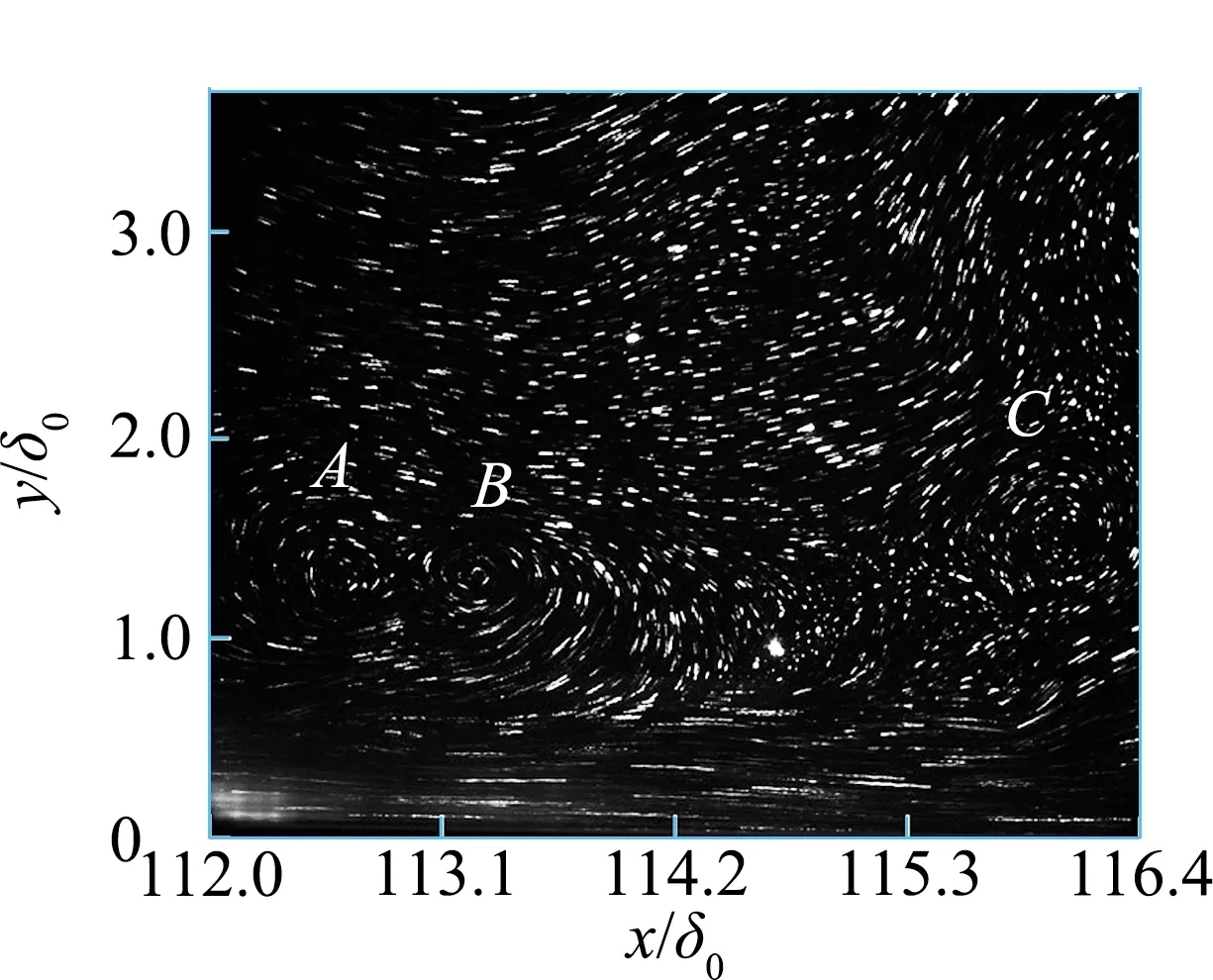
圖6為流向位置接近實(shí)驗(yàn)終止位置、U*=0.9時(shí)測(cè)量到的位于邊界層內(nèi)的渦合并過(guò)程中的4幀典型實(shí)驗(yàn)圖像及處理結(jié)果。圖6的u*云圖和R云圖顯示的渦結(jié)構(gòu)的法向高度y/δ0在1~1.5之間,這里采用的δ0=10 mm,實(shí)驗(yàn)終止位置處的邊界層厚度為20 mm。該系列圖像捕捉到了三個(gè)順時(shí)針旋轉(zhuǎn)的A渦、B渦和C渦。A渦和B渦在流動(dòng)過(guò)程中發(fā)生合并形成尺寸更大的D渦,而C渦在此期間位置及形狀基本保持不變,表明運(yùn)動(dòng)速度與Uc基本一致。
令t*=tU∞/δ0,t為測(cè)量時(shí)刻。圖6(a)為t*=80時(shí),兩個(gè)尺寸基本相同的A渦和B渦開(kāi)始發(fā)生合并,從u*云圖及流線(xiàn)圖可知此時(shí)A渦和B渦渦心之間的距離約為0.65。t*=81時(shí),如圖6(b)所示,兩渦渦心之間的距離減小到0.55。從測(cè)量可知B渦運(yùn)動(dòng)速度逐漸變慢,A渦運(yùn)動(dòng)速度基本不變,逐漸追上B渦,兩渦水平靠近。到圖6(c)t*=83時(shí),A渦和B渦開(kāi)始接觸且互相繞對(duì)方沿順時(shí)針?lè)较虬l(fā)生了旋轉(zhuǎn),此時(shí)兩渦不僅具有流向方向的速度差,也具有法向方向的速度差。當(dāng)t*=85時(shí),如圖6(d)所示,新的順時(shí)針旋轉(zhuǎn)的D渦形成。
(a) t*=80
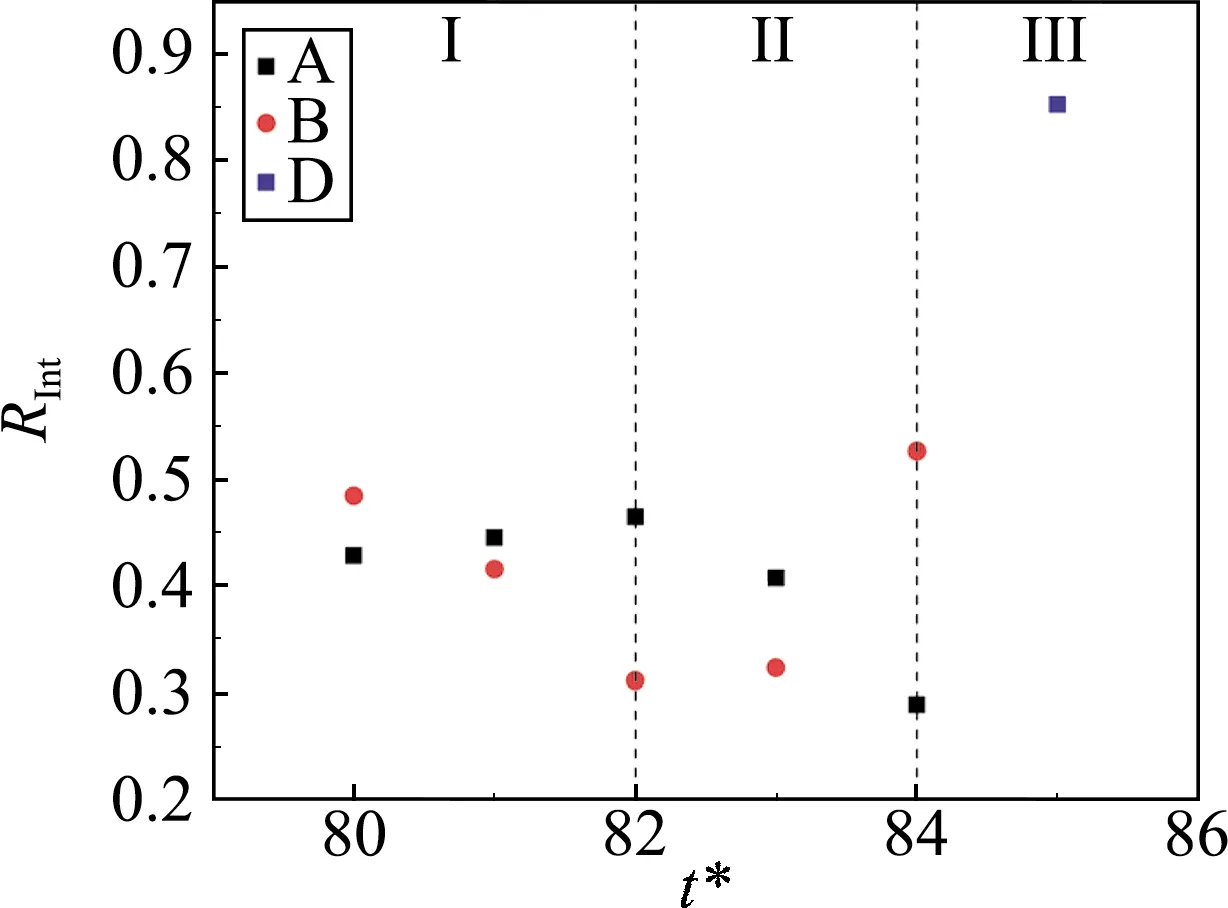
圖7 A渦和B渦合并過(guò)程中RInt隨時(shí)間的變化Fig.7 Temporal distributions of RInt during the merging process of A vortex and B vortex
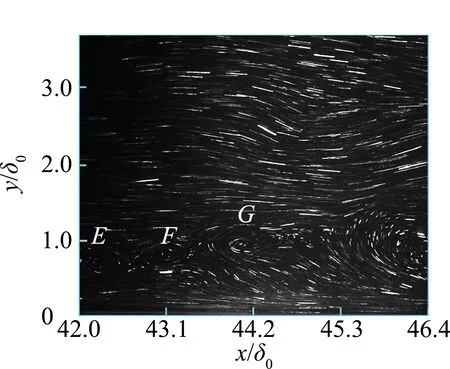
圖8為U*=0.8時(shí)測(cè)量到的另一組渦合并過(guò)程中的4幀典型的實(shí)驗(yàn)圖像及處理結(jié)果。t*=34時(shí),由圖8(a)R云圖得到三個(gè)渦的ΔS分別為0.075、0.08和0.12,E渦和F渦開(kāi)始發(fā)生合并,但F渦沒(méi)有同G渦合并。分析認(rèn)為由于F渦和E渦的尺寸更加接近,而F渦尺寸小于G渦,且G渦誘使下方流體向上運(yùn)動(dòng)到了F渦和G渦之間,阻礙了F渦和G渦的接觸。t*=34時(shí)由圖8(a)u*云圖可知E渦和F渦兩渦心之間的距離為0.9,t*=35時(shí)渦心距離減小到了0.7,由連續(xù)兩張u*云圖可知E渦運(yùn)動(dòng)速度變快,F(xiàn)渦速度基本不變,兩個(gè)渦在流向方向具有速度差,因此E渦逐漸平移靠近F渦。到t*=36時(shí),由圖8(c)可知E渦和F渦發(fā)生接觸互相繞對(duì)方沿順時(shí)針?lè)较虬l(fā)生旋轉(zhuǎn),表明兩渦此時(shí)也具有了法向方向的速度差。當(dāng)t*=38時(shí),如圖8(d)所示,新的順時(shí)針旋轉(zhuǎn)的G渦生成,其ΔS為0.18,即新生成的G渦尺寸約為合并初始時(shí)E渦和F渦尺寸之和。
E渦和F渦在合并過(guò)程中RInt隨時(shí)間的變化如圖9所示。合并過(guò)程可以分為三個(gè)階段。第一個(gè)階段為從t*=34到t*=35,由于流向速度差,在兩個(gè)渦水平靠近過(guò)程中E渦不斷吸收F渦能量,從而E渦RInt逐漸增大,F(xiàn)渦RInt則逐漸減小,此階段稱(chēng)為平移靠近階段。從t*=35到t*=37為第二階段,兩渦相互接觸并在水平和法向方向速度差共同作用下繞對(duì)方沿順時(shí)針旋轉(zhuǎn),在旋轉(zhuǎn)過(guò)程中兩個(gè)渦的能量發(fā)生擴(kuò)散,能量高的E渦會(huì)將能量傳輸給F渦,因此E渦RInt逐漸降低,F(xiàn)渦RInt逐漸上升,此階段稱(chēng)為相互旋轉(zhuǎn)階段。從t*=37到t*=38為第三階段,RInt值為0.42的H渦生成,初始合并時(shí)E渦和F渦的RInt值分別為0.22和0.18,可見(jiàn)H渦強(qiáng)度基本為初始合并時(shí)兩渦強(qiáng)度之和,此階段為最終合并階段。
(a) t*=34
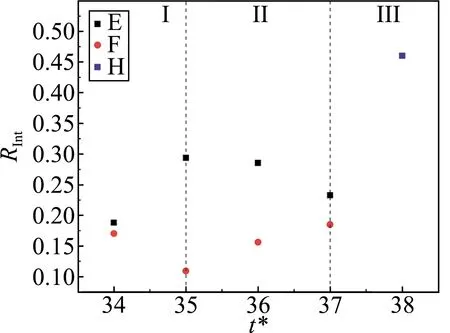
圖9 E渦和F渦合并過(guò)程中RInt隨時(shí)間的變化Fig.9 Temporal distributions of RInt during the merging process of E vortex and F vortex
綜合分析以上兩組渦合并現(xiàn)象,發(fā)生合并的一對(duì)渦為相鄰且尺寸、強(qiáng)度基本一致的同向旋轉(zhuǎn)渦,且渦之間沒(méi)有流體流動(dòng)隔離,合并過(guò)程可以分為平移靠近、相互旋轉(zhuǎn)和最終合并三個(gè)階段。合并過(guò)程中兩渦的Liutex強(qiáng)度R呈反向變化,新生成的渦尺寸和強(qiáng)度基本為初始合并時(shí)兩個(gè)渦之和,且旋轉(zhuǎn)方向與兩個(gè)渦同向。
由于Liutex可以靈敏地捕捉到流體的轉(zhuǎn)動(dòng),在圖6和圖8R云圖中也有一些R不等于零的局部小區(qū)域,如圖6(a)R云圖中的1、2區(qū)域。從流線(xiàn)圖可以觀察到在這些局部小區(qū)域中流體沒(méi)有形成渦,但存在彎曲,即存在轉(zhuǎn)動(dòng)。
5 結(jié) 論
采用具有拉格朗日性質(zhì)的MSFLE圖像測(cè)量方法和Liutex理論對(duì)矩形管道底部湍流邊界層渦結(jié)構(gòu)開(kāi)展了實(shí)驗(yàn)研究。實(shí)驗(yàn)測(cè)量了湍流邊界層流向-法向平面內(nèi)渦結(jié)構(gòu)隨時(shí)空演變過(guò)程,并基于骨架提取算法及Liutex理論對(duì)渦合并現(xiàn)象進(jìn)行了分析,得到如下結(jié)論:
1) MSFLE圖像測(cè)量方法具有測(cè)量裝置簡(jiǎn)單,對(duì)實(shí)驗(yàn)條件要求低的特點(diǎn),通過(guò)拉格朗日視角可以更加直觀地測(cè)量湍流邊界層渦結(jié)構(gòu)特征及周?chē)鲌?chǎng)的時(shí)空演變過(guò)程。
2) Liutex渦識(shí)別算法能準(zhǔn)確表征渦區(qū)域及渦旋轉(zhuǎn)強(qiáng)度,MSFLE測(cè)量方法結(jié)合Liutex渦識(shí)別算法可以很好地應(yīng)用于湍流邊界層中渦結(jié)構(gòu)時(shí)空演變過(guò)程的可視化與量化研究。
3) 矩形管道湍流邊界層中渦合并的條件是兩個(gè)渦相鄰、尺寸和強(qiáng)度基本相同且為同向旋轉(zhuǎn)渦,渦之間沒(méi)有流體流動(dòng)隔離。渦合并過(guò)程分為平移靠近、相互旋轉(zhuǎn)和最終合并三個(gè)階段。合并中兩個(gè)渦的Liutex強(qiáng)度R呈反向變化,最終生成的新渦強(qiáng)度和尺寸基本為初始合并時(shí)兩個(gè)渦之和,且旋轉(zhuǎn)方向與兩個(gè)渦同向。
猜你喜歡
小獼猴智力畫(huà)刊(2022年9期)2022-11-04 02:31:42
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
