大型民用客機襟翼運動同步性計算分析
2020-07-30 14:03:27曾文斌
科技視界 2020年17期
曾文斌
摘 要
在飛機的起飛、降落、巡航飛行中,襟翼運動起著重要的作用。全機有多塊內、外襟翼,當分別繞各自不同的轉軸運動時,會產生不同的圓錐運動。為實現所有的內、外襟翼同步運動,需對每塊襟翼上的不同作動器進行設計、布局及對作動器運動參數進行計算。介紹主要現代客機襟翼作動器運動學計算方法及內、外襟翼同步運動中的誤差計算與分析。
關鍵詞
后緣襟翼;同步;運動學計算
中圖分類號: V224.5 ? ? ? ? ? ? ? ? ? 文獻標識碼: A
DOI:10.19694/j.cnki.issn2095-2457 . 2020 . 17 . 07
Abstract
The flap movement in the airplane plays an important role during the process of taking off, landing and cruising. The inner and outer flaps which whirl about their different sports respectively, produce different conical motion. In order to achieve the synchronized movement of all the inner and outer flaps, the design, layout, and motion of the actuator parameters should be calculated for different actuators on each flap. This paper describes the method of actuator kinematic calculation and the inner and outer flap synchronized movement of error calculation and analysis for the modern airplane.
Key words
Trailing edge flaps; The synchronized movement; Kinematic calculations
0 緒論
襟翼控制系統是大型民用飛機的關鍵分系統之一,主要是和襟翼后退偏轉改變機翼彎度和面積,以增加飛機起飛時的升力和著陸時的升力及阻力,從而縮短飛機起飛和滑跑距離,改善飛行性能[1]。
對襟翼控制系統來說,系統的最基本的設計要求是要保持襟翼運動線系的同步性。因為飛機襟翼的收放處在飛機起降的關鍵階段,一旦襟翼控制系統發生故障,特別是襟翼不同步時(行業內稱之為剪刀差),則將導致飛機產生滾轉運動,進而影響飛行安全[2]。民航飛機適航條例CCAR-25部中對此做了明確的要求[3]。
隨著飛機設計技術的發展,目前襟翼舵面的同步性設計都是采取一套驅動系統的方式。如果把整個運動線系都在一個坐標系內運動,那么舵面運動將會保持同步。但是實際設計中,基本上所有機型的襟翼轉軸都具有一定的空間角度,所以在動態運動過程是無法實現完全同步的。另外,對于大型客機而言,襟翼舵面沿翼展方向的尺寸長達十幾米,經常是兩個作動器驅動同一襟翼舵面運動,如果兩個作動器的運動不同步,則會形成力紛爭,扭轉襟翼翼面,造成結構的破損。
對于大型飛機而言,其襟翼的類型主要分為簡單式的和后退式兩種。本文中主要介紹簡單式襟翼的運動同步。對于簡單式襟翼而言,由于機翼內段和外段差異較大,從而導致內外襟翼的轉軸也不在同一直線上。內襟翼軸線一般與機身軸線基本垂直,而外襟翼可能既上翹又后掠,使得內外襟翼在同時運動時需順應差異大的機翼外形,這便大大增加了作動器設計與計算的難度。內外襟翼的轉軸存在一定的空間位置關系。內襟翼的轉軸線較“平”,而外襟翼轉軸線是一根上翹及后掠的空間直線,且轉軸線距機翼下方較遠。內外襟翼各自繞其轉軸旋轉,相對于各自轉軸偏轉的角度就是襟翼的運動角度。
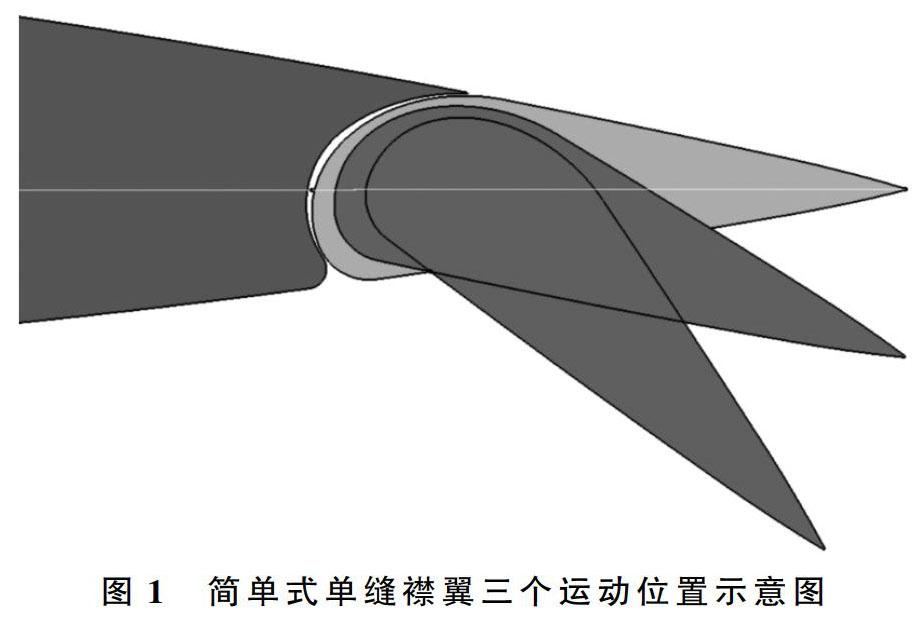
簡單式單縫襟翼其運動可以看成為一個圓錐運動(見圖1)。由于內外襟翼轉軸線與機翼的弦平面并非平行,而是形成一夾角。這樣,舵面繞轉軸的運動形成了一個圓錐運動(一部分)。然而,“平“的內襟翼轉軸線決定了內襟翼作錐角很小的圓錐運動,近似于圓柱運動,而外襟翼偏轉為錐度很大的圓錐運動。這種差異極大的圓錐在運動時要達到同步,勢必難度很大[4]。
為使內外襟翼在作差異很大的圓錐運動時達到同步,較好的辦法是采用兩套襟翼驅動系統分別推動內外襟翼運動,只需在兩個驅動系統之間采用簡單的協調同步措施。這種辦法已廣泛應用在早期的大、中型客機上。然而,現代客機從減重和簡化系統復雜度角度出發,目前通用的設計方式均采用由一套驅動系統來同時推動內、外襟翼運動。這無疑對內外襟翼同步運動帶來了很大的挑戰。
為了保證氣動性能的穩定性,除了同一個襟翼一面的作動器所產生的舵面運動必須同步之外,內外兩塊襟翼的運動也應基本保持同步。因此,內、外襟翼作動器的合理配置及相關參數的比較計算非常重要。從理論上而言,由于兩舵面的轉軸線的差異,幾乎無法實現內、外襟翼的完全同步運動。唯一的辦法是使內、外襟翼在運動過程中,同一時刻,或相同偏轉角度時的誤差最小。要達到這一目的,需要對內、外襟翼作動器進行多次修改參數、漸進計算,最終達到允許的誤差范圍內。
對于大型民用飛機襟翼操縱系統的設計,主要采用同一套驅動系統通過硬式扭力管傳動運動,通過多個作動器分別推動襟翼運動。一般而言,扭力管等傳動線系都是可以實現同步的。但是由于內外襟翼存在空間位置關系,所以連接襟翼的作動器也會存在一定的空間位置關系。而如何對不同位置上的作動器進行設計來保證整體的同步,將成為整個襟翼操縱系統設計的重點和難點[5]。
1 設計方案
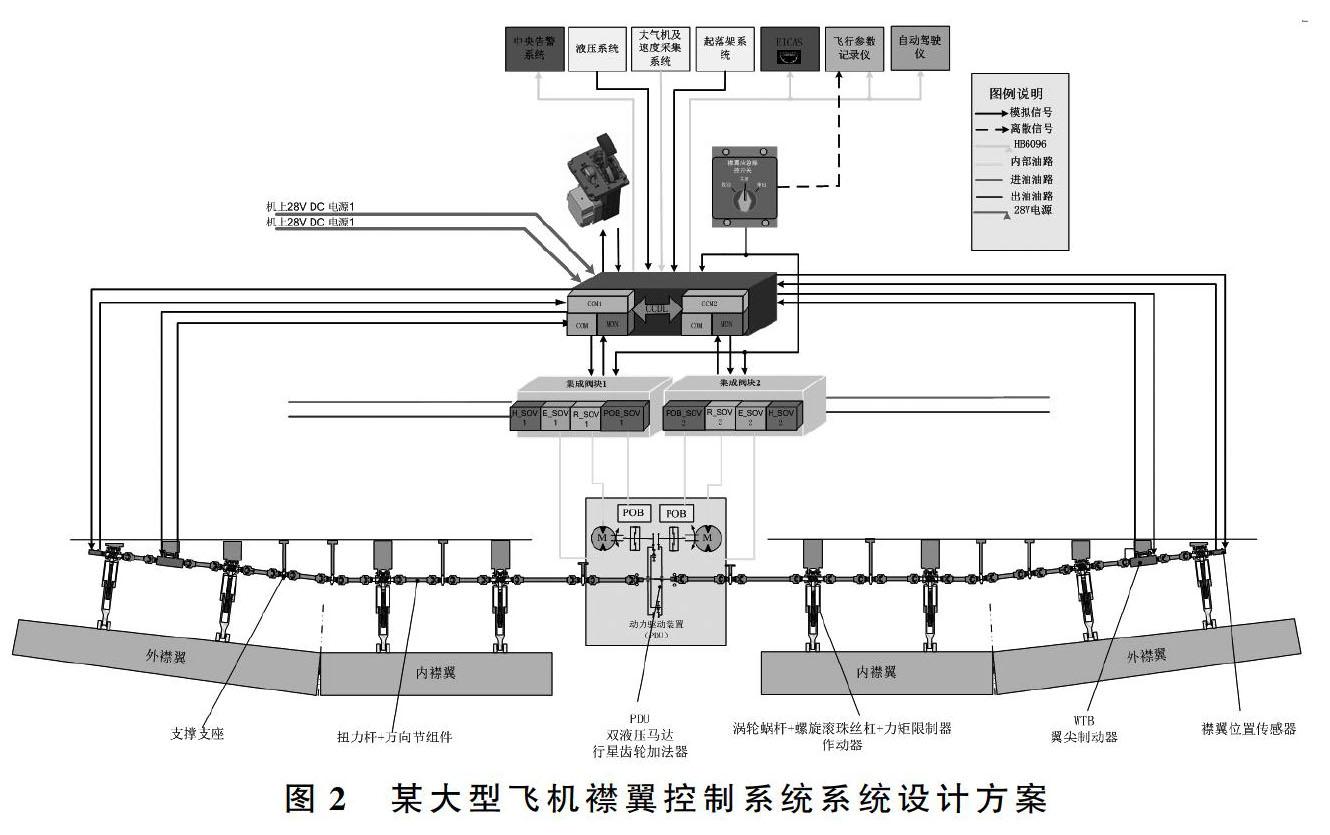
為確保內外側襟翼在運動全過程實現同步,該型飛機襟翼控制系統采用如圖2所示的設計方案。
襟翼控制系統工作原理如圖2所示:在正常工作模式下,將正常/備用切換開關切換至正常狀態,狀態切換繼電器切換切至正常狀態(線圈不供電斷開),操縱襟翼操縱手柄產生目標襟翼運動指令,襟翼控制計算機同時采集/處理襟翼操縱手柄襟翼運動指令和APPU位置輸出裝置反饋襟翼位置信號,并向高速電磁閥和伸出/收回電磁閥發出通斷信號,給液壓馬達供壓驅動傳動線系旋轉,并經滾珠螺旋作動器將傳動線系的旋轉運動轉化為絲桿的伸出/收回的直線運動,從而驅動襟翼的收上/放下運動。在正常工作模式下,當出現了高速電磁閥和伸出/收回電磁閥集成閥塊或液壓馬達故障,另一側高速電磁閥和伸出/收回電磁閥集成閥塊或液壓馬達功能完好,即在降級工作模式下,動力驅動裝置輸出轉速變為0.5倍額定輸出轉速,輸出扭矩恒定不變,襟翼收放時間相對增加約為正常工作模式的一倍。
在備用工作模式下,將正常/備用切換開關切換至備用狀態,狀態切換繼電器切換切至備用狀態(線圈供電吸合),通過操縱備用操縱開關產生目標襟翼運動指令,直接向高速電磁閥和伸出/收回電磁閥發出通斷信號,給液壓馬達供壓驅動傳動線系旋轉,并經滾珠螺旋作動器將傳動線系的旋轉運動轉化為絲桿的伸出收回的直線運動,從而驅動襟翼的收上/放下運動,駕駛員通過觀察襟翼位置顯示,判斷襟翼收上/放下是否到位,從而判斷是否將備用操縱開關扳至 “停止”位,最終實現襟翼收上/放下。在備用工作模式下,當出現了高速電磁閥和伸出/收回電磁閥集成閥塊或液壓馬達故障,另一側高速電磁閥和伸出/收回電磁閥集成閥塊或液壓馬達功能完好,即在降級工作模式下,動力驅動裝置輸出轉速變為0.5倍額定輸出轉速,輸出扭矩恒定不變,襟翼收放時間相對增加約為正常工作模式的一倍。
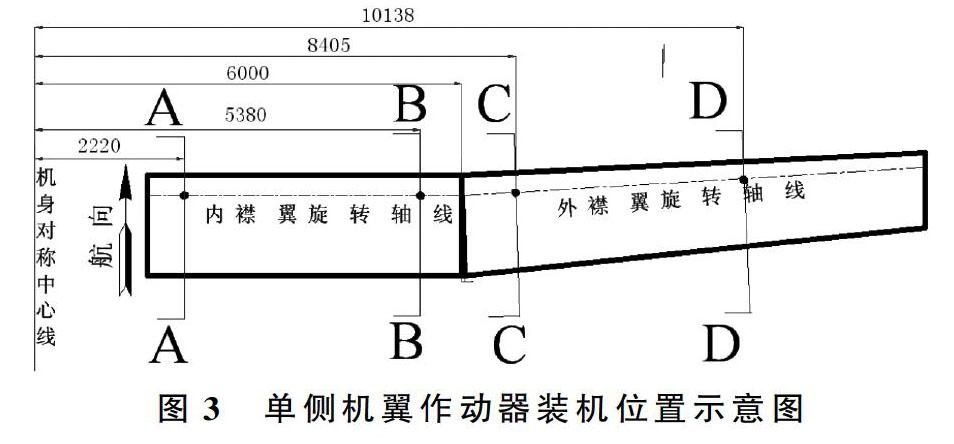
該在研大型飛機單側機翼各包括一片內襟翼和一片外襟翼,如圖3所示A-A、B-B、C-C和D-D剖面位置分別擬一根安裝滾珠絲杠作動器;內襟翼內側滾珠絲杠作動器(A-A)到機身對稱平面投影長度2220mm,擬采用2根扭力桿和1個支架;滾珠絲杠作動器(A-A)到滾珠絲杠作動器(B-B)見投影長度3160mm,擬采用2根扭力桿和1個支架;內側襟翼和外側襟翼存在前掠角度4°,在滾珠絲杠作動器(C-C)到滾珠絲杠作動器(B-B)投影長度3025mm,擬采用3個扭力桿和兩個支架;在滾珠絲杠作動器(C-C)到滾珠絲杠作動器(D-D)投影長度1733mm,在(C-C)和(D-D)之間安裝翼尖制動器),為此采用兩個扭力桿;襟稍位置安裝位置輸出裝置。左側襟翼布局情況與右側襟翼布局情況呈對稱關系。
2 作動器參數配置
該大型民用飛機襟翼操縱系統采用的同一套驅動系統通過硬式扭力管傳動運動,通過多個作動器分別推動襟翼運動。一般而言,扭力管等傳動線系都是可以實現同步的。但是由于內外襟翼存在空間位置關系,所以連接襟翼的作動器也會存在一定的空間位置關系。而如何對不同位置上的作動器進行設計來保證整體的同步,將成為整個襟翼操縱系統設計的重點和難點。運動線系的從動力驅動裝置、萬向節、傳達桿到作動器這段的運動都是由滾動轉換為滾動的模式,因此,需要對內、外襟翼作動器的位置及運動參數進行合理配置,確保在三個工作位置上內外襟翼的同步性最好。換言之,也就是要使內、外襟翼在運動過程中,同一時刻,或相同偏轉角度時的誤差最小。為了便于計算,首先要對襟翼運動線系進行數學建模,把復雜的物理運動學關系變成簡單的數學運動。
2.1 同一舵面上兩作動器位置選擇
舵面作動器的主要功能是克服舵面上的氣動外載(切向分力)推動舵面運動(放下和收上)。最理想的作動器的布置,應近似放在氣動外載(切向分力)合力點的兩側等距處。然而,實際上,受結構承力及力傳遞的限制,作動器很難布置在理想位置上。一般作動器布置在結構的襟翼支撐點位置附近。而且通常我們將作動器布置在與襟翼轉軸相垂直的平面內,四個剖面的作動器根據各個剖面的空間位置和載荷數據進行單獨設計,每個剖面處舵面搖臂的半徑也不相同。
2.2 作動器安裝位置參數計算
當作動器沿翼展方向位置確定之后,則作動器所在的翼剖面與轉軸的交點O(b、Y下)即可確定下來,如圖 4所示。設P為作動器在機翼結構(后梁)上的連接點,它對計算作動器運動影響很大。Q為作動器與襟翼的連接點,它既要考慮與襟翼(襟翼搖臂)連接的空間大小,又要考慮與作動器的上止動塊位置有關。同時,它還決定了襟翼的轉動半徑。
第一步,選取A-A剖面作動器剖面在結構限制范圍內進行P、Q參數預選,據已知的a、b、H、Y下則可以得到A-A剖面的f、C、L、r、β四個參數值如表1所示。
第二步,A-A剖面作動器參數確定的情況下,再根據A-A剖面的參數來求B-B、C-C、D-D剖面的參數。
為使舵面繞轉軸作圓錐運動,則兩作動器的運動面必須平行,參數必須成比例,設B-B剖面的OQ1為A-A剖面的OQ1的n倍,即兩個剖面處的舵面搖臂半徑之比為n。則即B-B剖面的PQ1為A-A剖面的PQ1的n倍,B-B剖面的PQ2為A-A剖面的PQ2的n倍,B-B剖面的PO為A-A剖面的PO的n倍。
根據兩個剖面的數學關系,可以用數學解析法求解B-B剖面的參數。這個過程列方程和求解都非常復雜,難度較大,可采用編程方式利用MATLAB軟件進行求解。用類似的方法,確定了適合的滿足外側襟翼同步性的C-C剖面和D-D剖面作動器的參數選取。
已建立了襟翼系統計算分析數學模型,通過此模型可計算出各剖面作動器的運動參數,如表2所示。
2.3 作動器參數計算
通過上述計算我們可以看出,對各個剖面的作動器而言,其運動行程雖基本相同,但舵面搖臂長度不一,因此,為了保證運動的同步性,那么對于各滾珠絲桿作動器的導程必須分別計算。
