基于k-目標跟蹤的節點部署優化算法
2020-07-15 07:23:16白秋產張昊倫
全球定位系統 2020年3期
白秋產,張昊倫
(1.淮陰工學院 自動化學院,江蘇 淮安 223003;2. 黑龍江大學 機電工程學院, 黑龍江 哈爾濱 150080)
0 引 言
無線傳感網絡(WSNs)已廣泛應用于機器人系統、病人看護、目標跟蹤[1-2].在目標跟蹤應用中,先將傳感節點部署于興趣區域[3-4],再通過這些傳感節點感測目標移動,進而實現對目標的跟蹤.WSNs中的目標跟蹤被認為是衡量跟蹤系統(TTS)[5-8]的跟蹤性能的重要指標.
若有k個定向節點同時跟蹤FoI的移動目標,則稱為k-目標跟蹤(kTT).圖1示出了一個TTS系統,傳感節點分布于長形區域,目標在FoI內移動.當靠近移動目標時,定向節點就將跟蹤信息傳輸至信宿.如果從定向節點至信宿有m條連通路徑,且m≥1,則稱為m-連通.
本文旨在通過優化節點部署方案,提高WSNs內的kTT的跟蹤質量.考慮三角形、矩形和六邊形節點部署模型,并針對這些模型解決問題:如何以最少的節點實現目標跟蹤.文獻[9]利用超寬帶傳感節點和Bernoulli濾波器解決目標跟蹤問題[10].通過Bernoulli濾除數據噪聲.類似地,文獻[11]針對1-覆蓋和m-連通的WSNs,研究了最優節點部署策略.此外,文獻[12]也研究了節點部署問題.依據不同的通信半徑和感測半徑,研究如何以最少的節點數實現4-連通和興趣區域的全覆蓋.
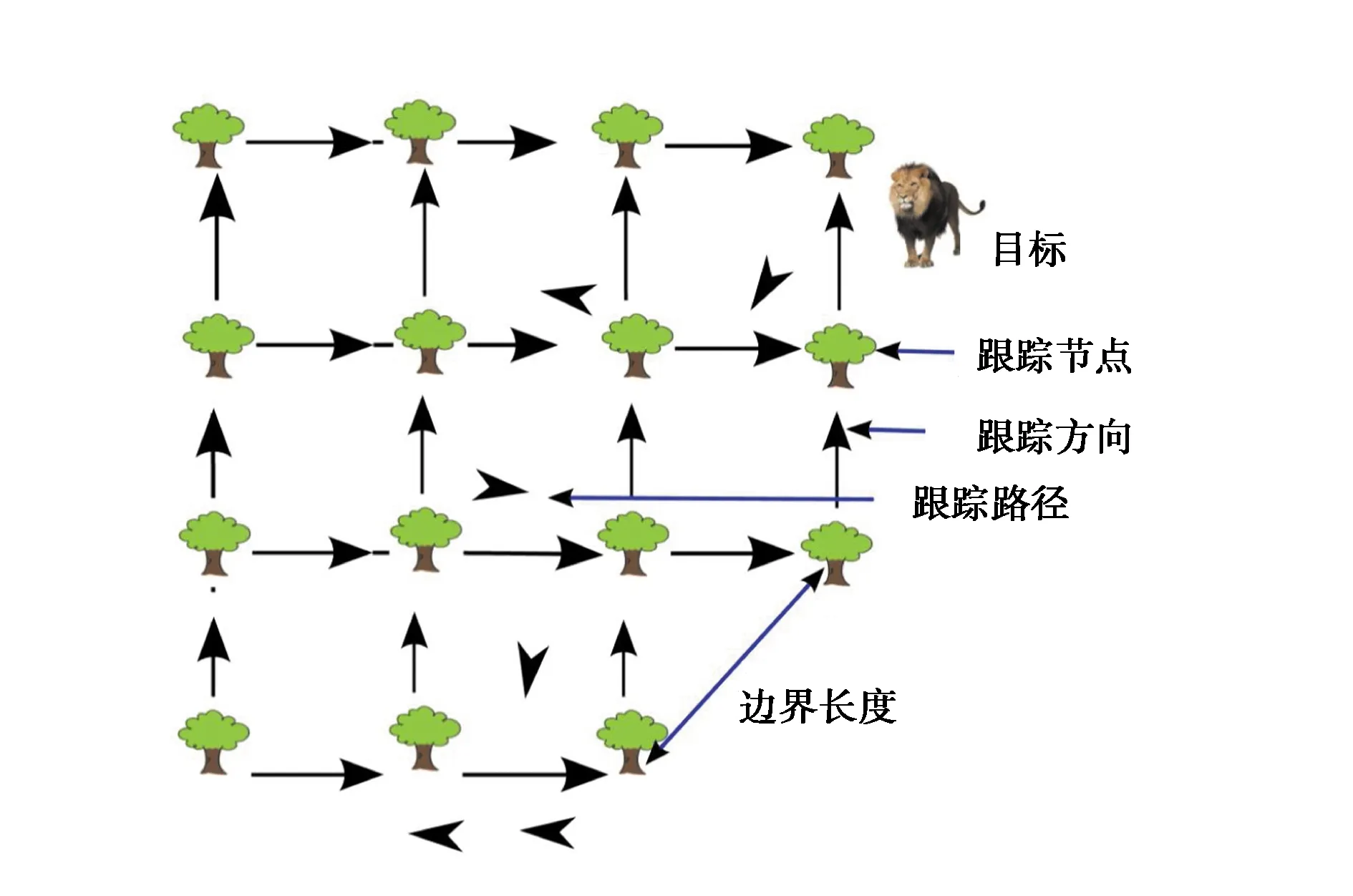
圖1 TTS的示例
然而,現在的解決目標跟蹤問題方案僅考慮一個目標跟蹤.并且,這些節點部署方案只是基于特定的區域.為此,針對目標跟蹤問題進行分析.考慮三種規則形狀(等邊三角形、矩形和六邊形),分析在這些規則形狀下實現k-目標跟蹤所需的節點數,并推導了最優邊長.
1 系統模型及約束條件
定向節點確定性地部署在興趣區域Ψ內.考慮三種規則多邊形:等邊三角形、矩形和六邊形,如圖2所示.圖2中的點a和點b表示一段路線的始點和終點.
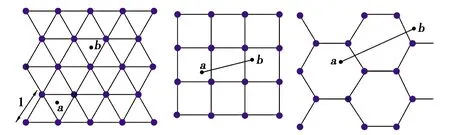
(a)等邊三角形 (b)矩形 (c)六邊形
令l表示多邊形的邊長,且l>0.并引用p表示多邊形,p=0、1、2分別表示等邊三角形、矩形、六邊形.同時,令(x,y)表示FoI內的節點位置,且(x,y)∈Ψ,x≥0,y≥0.
1.1 跟蹤模型
引用定向的跟蹤模型[13].圖3示出了一個定向節點模型.令φ表示節點的跟蹤角度,且1≤φ≤360°.此外,每個節點只有有限的跟蹤半徑.令Rs表示節點的跟蹤半徑,且Rs>0.

圖3 定向節點模型
引用跟蹤區域的定向(OTR)變量,其表示FoI內定向節點的方向.令θx,y表示將位于s(x,y)處的節點的定向矢量,且0≤θx,y≤2π.
1.2 通信模型
引用全向的通信模型.節點si能夠與其通信范圍Rc內的任何節點通信.令A(si,Rc)表示節點si的通信區域.假定網絡內所有節點具有相同的通信半徑Rc.
定義1:如果節點si離節點sj的距離小于Rc,則節點sj就是節點si的一個鄰居節點.在m-連通的WSNs,任意節點sx的鄰居節點數大于m,且m≥1.
定義2:令點a和點b是路徑一段的始點和終點.這兩點的歐式距離就是該段的長度,如圖2所示.令l表示規則多邊形的邊長.若滿足式(1),則表明目標穿越了至少一個跟蹤區域,即
Lsegment≥lp+1.
(1)
1.3 目標跟蹤問題
給定FoI區域Ψ的參數(Rs、Rc、k、m、Lsegment),目標跟蹤問題就是:決定區域Ψ內定向節點的位置和跟蹤區域OTR,致使移動目標至少被k個定向節點跟蹤,且所需的定向節點數最少.
2 目標跟蹤問題的解
本節針對三個不同模型(等邊三角形、矩形和六邊形),求解目標跟蹤問題.求解過程可分為4個階段.第一步,估計定向節點坐標;第二步,估計跟蹤區域的OTR,隨后再針對給定模型,估計最優的邊長度(OSL),最后,再依據OSL和規則模型計算所需的最少節點數.
2.1 節點坐標
針對等邊三角形、矩形和六邊形模型,求解目標跟蹤問題.最初,將FoI劃分為規則形狀,然后再計算節點坐標.如圖4所示.
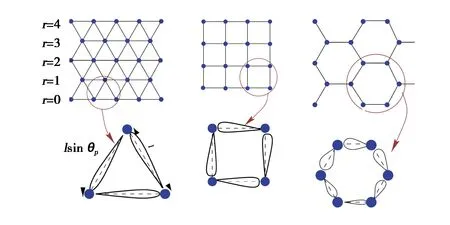
(a)等邊三角形 (b)矩形 (c)六邊形
令l表示邊長,lp表示高度,且lp=lsinθp,其中p=0,1,2.將FoI區域劃分偶數和奇數行,并令r表示行數.
在偶數行里,即r=(0,2,4,…),用行數r表示節點的橫坐標(x)和縱坐標(y),即x=rl、y=rlp.類似地,在奇數行,即r=(1,3,5,…)時,橫坐標x在rl的基礎上加l/2.因此,用式(2)表示節點坐標.
(x,y)∈{(rl,rlp),r=(0,2,4,…),
(rl+l/2,rlp),r=(1,3,5,…).
(2)
在矩形模型中,如圖4(b)所示, 橫坐標和縱坐標相等.因此,可用式(3)計算矩形模型的節點坐標:
(x,y)∈(rl,rlp).
(3)
三角形與六邊形模型的差別僅在于:節點是否位于六邊形的中心,如圖4(c)所示.為了估計六邊形模型中節點坐標,就依據式(2)判斷是否節點位于六邊形內,如滿足:mod(y/lp,2)=mod(x,3)+1,則表明六邊形內沒有節點.
2.2OTR
使用以下定理推導每個模型中節點的OTR.
定理1:將興趣區域Ψ劃分等邊長l的矩形.令θx,y表示位于(x,y)處節點的方向,其中{x,y}≥0.如果滿足式(4),則興趣區域就能被k-目標跟蹤.
Rs≥2klandθx,y=mod(x+y,2)×π2.
(4)
定理2:將興趣區域Ψ劃分等邊三角形,且邊長為l.令θx,y表示位于(x,y)處節點的方向,如果滿足式(5),則興趣區域就能被k-目標跟蹤:
Rs≥3klandθx,y=mod((x+y+
mod(y,2)),3)×π3.
(5)
定理3:將興趣區域Ψ劃分六邊形,且邊長為l.令θx,y表示位于(x,y)處節點的方向,如果滿足式(6),則興趣區域就能被k-目標跟跟蹤:
Rs≥4klandθx,y=mod((x+y+mod(y,2)),3)×π3.
(6)
結合式(4)、(5)和(6),將OTR綜述地表述如下:將興趣區域Ψ劃分模型p,且邊長為l,則興趣區域就能被k-目標跟跟蹤的條件:
Rs≥(3p2-5p+62)kl,
(7)
且
θx,y≥
{mod((x+y+mod(y,2)),3)×θ0,ifp=0,
mod((x+y),2)×θ0,ifp=1,
mod((x+y+mod(y,2)),3)×θ0,ifp=2.
(8)
2.3OSL
令s(x,y)表示節點s的位置.令離節點s最近的第m個鄰居節點位于υ.將節點s離此鄰居節點的距離表示為dp,m.
min(Lsegmentp+1,2Rs(3p2-5p+6)k,Rcdp,m).
(9)
2.4 節點的部署
利用OSL在興趣區域Ψ部署節點.假定在寬為L、長為B的規則區域內,所需的節點數Np.
Np=(Lsegmentsinθp)
(Bsegment-Bpcosθp3segment-cosθp).
(10)
式中,p=0,1,2.
先計算三種形狀(等邊三角形、矩形、六邊形)下所需的節點數的最小值Nmin,并記錄Nmin值所對應的形狀(即p值).為了簡化描述,用p*表示能獲取最小Np值所對應的p值.
Nmin={Np*|minp=0,1,2Np}.
(11)
將p*也稱為最優模型.再將p*代入式(9),得到最優的OSL值*segment.將p*賦給p(p←p*)、*segment賦給l(l←*segment).然后,依據式(12)計算節點s(x,y)的位置:
(rl+lcos(θp2)cos(θp)mod(ylp,2),rlp).
(12)
如果(x,y)位于Ψ內,且將節點放置于s(x,y)處.若不屬于Ψ內,就將節點放置在Ψ邊界上交叉點上.對將x、y的進行更新:
x←x+l、y←y+lp,
(13)
如圖5顯示部署節點過程.
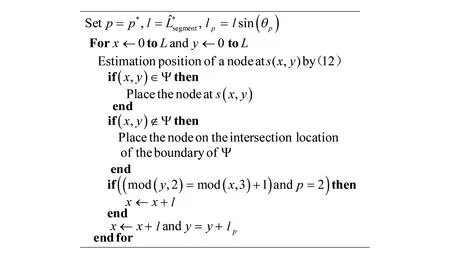
圖5 部署節點的過程
3 性能仿真
3.1 仿真參數
利用NS 2.34軟件建立仿真平臺.具體的仿真參數如表1所示.考慮兩個目標移動模型:1)隨機步行移動 (RKM)模型;2)隨機航點移動(RPM)模型.
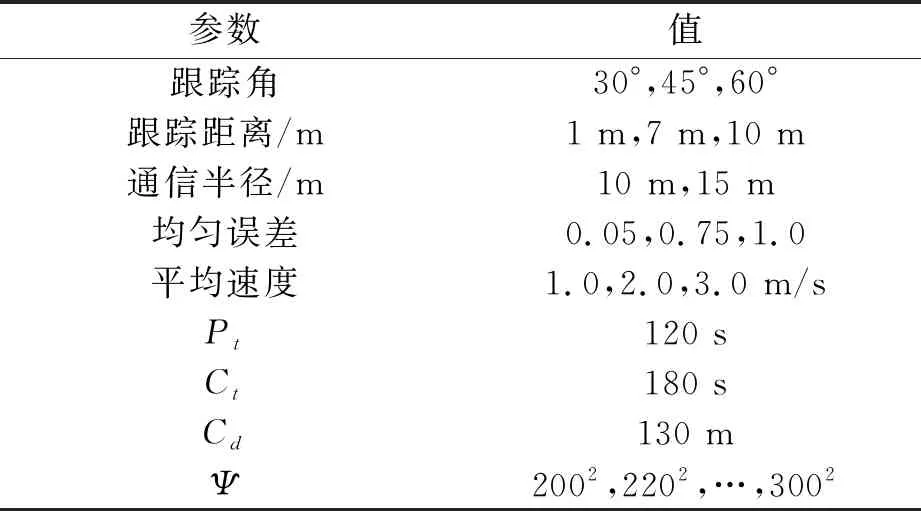
表1 仿真參數
在RKM模型中,目標隨機選擇移動方向和移動速度,從當前位置移動至另一個位置.速度范圍限定在[?min,?max],方向限定在[0,2π].令?avg表示目標的平均移動速度.在固定時間間隔Ct或者移動固定距離Cd后完成目標移動.而RPM模型中,目標每移動一段時間就暫停一段時間Pt.然后,再隨機選擇目的節點,以平均速度?avg進行移動.
3.2 跟蹤角的影響
首先分析跟蹤角對跟蹤誤差的影響.跟蹤誤差是指目標準確的位置與所跟蹤的位置間差值.表2~7示出了在等邊三角形、矩形和六邊形模型中的跟蹤誤差.
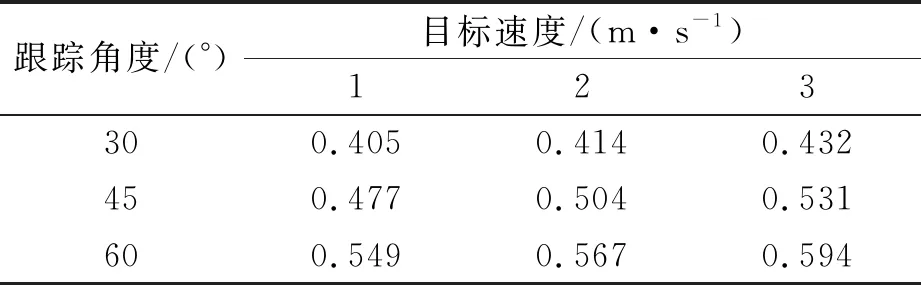
表2 RKM條件下跟蹤誤差(等邊三角形)
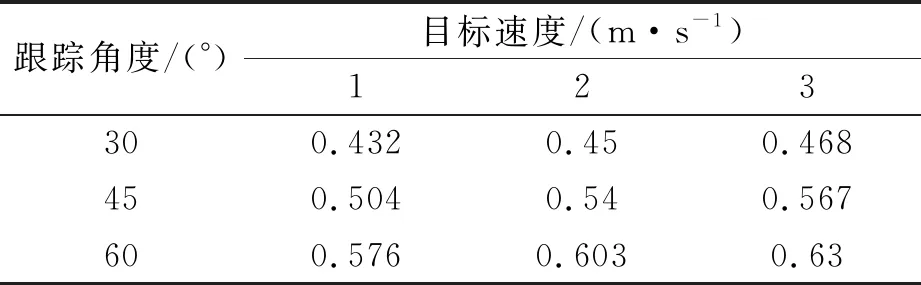
表3 RPM條件下跟蹤誤差(等邊三角形)
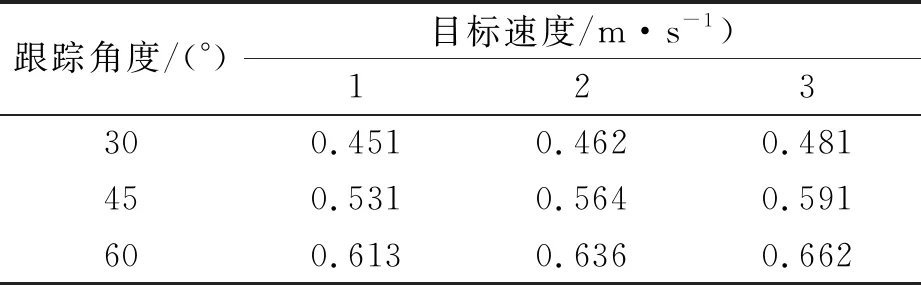
表4 RKM條件下跟蹤誤差(矩形)
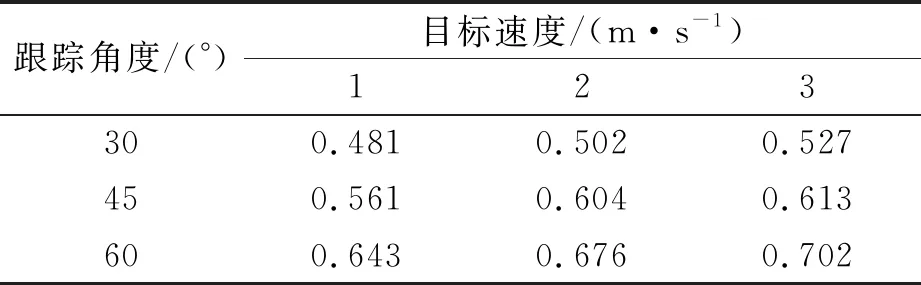
表5 RPM條件下跟蹤誤差(矩形)

表6 RKM條件下跟蹤誤差(六邊形)
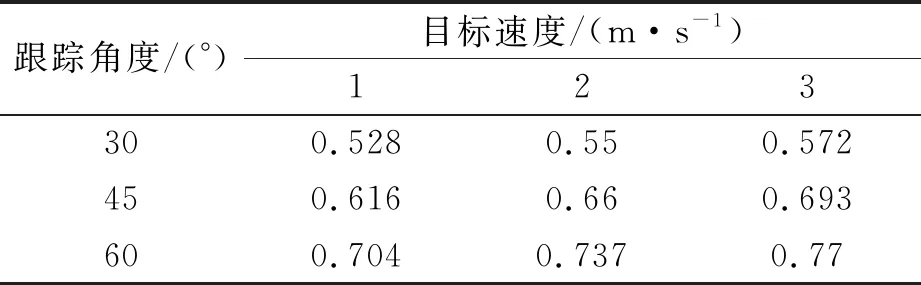
表7 RPM條件下跟蹤誤差(六邊形)
從表2~7可知,目標的角度和速度的增加,增加了跟蹤誤差.原因在于:速度的增加,降低了目標的穩定性.此外,相比于矩形和六邊形,等邊三角形具有最小的平均跟蹤誤差.
3.3 跟蹤距離的影響
表8~13示出了跟蹤距離對跟蹤誤差的影響.從表中的數據可知,當跟蹤距離從5 m增加至10 m時,平均跟蹤誤差提高了近50%.原因在于:跟蹤距離越大,用于跟蹤的信號強度就越弱.這不利于跟蹤精度.

表8 RKM條件下跟蹤誤差(等邊三角形)
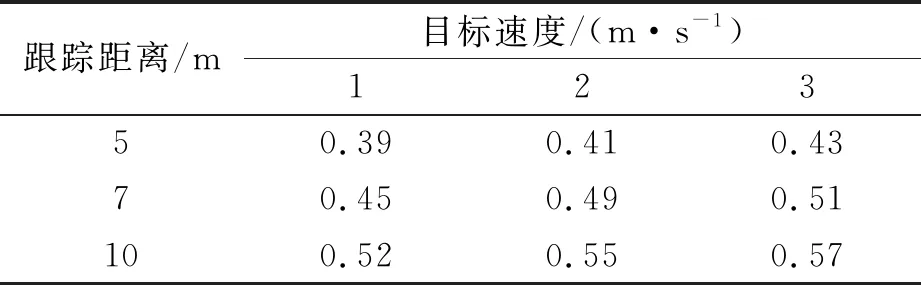
表9 RPM條件下跟蹤誤差(等邊三角形)
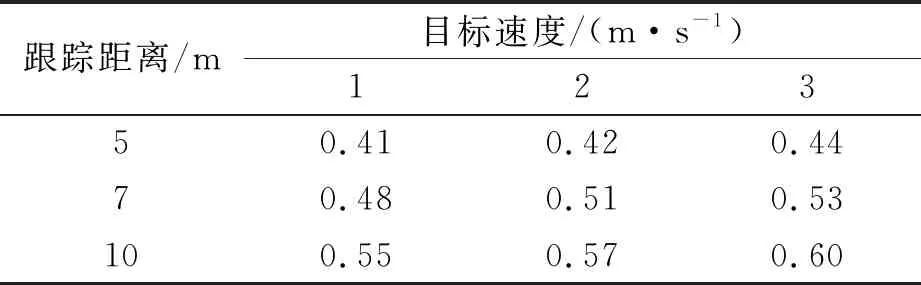
表10 RKM條件下跟蹤誤差(矩形)
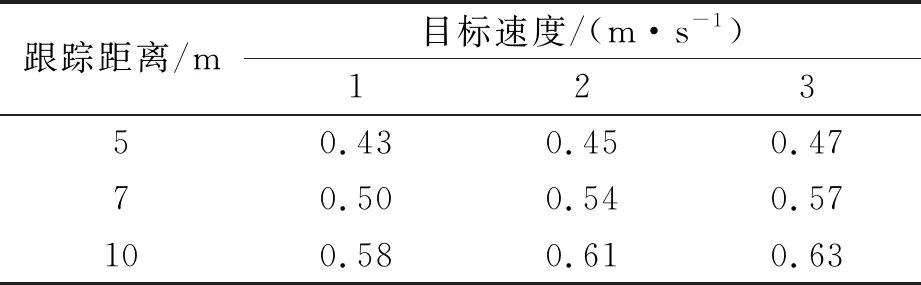
表11 RPM條件下跟蹤誤差(矩形)
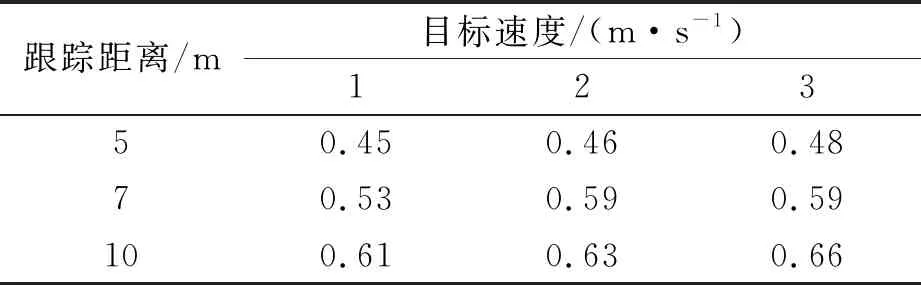
表12 RKM條件下跟蹤誤差(六邊形)
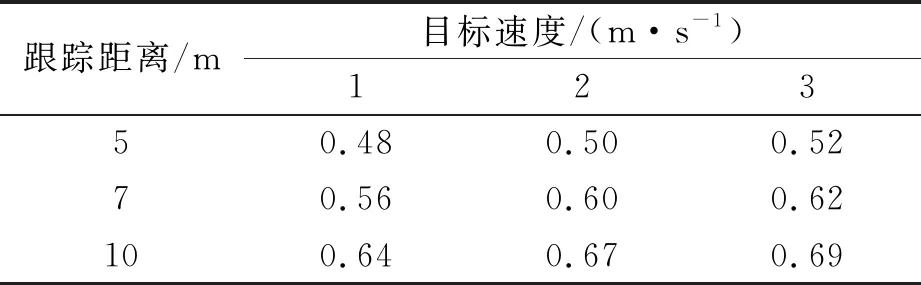
表13 RPM條件下跟蹤誤差(六邊形)
3.4 目標跟蹤k值的影響
本小節分析k值對目標跟蹤性能的影響.首先考慮k值對所需的節點數Np的影響.仿真參數:m=1、Rc=45 m、Rs=35 m、‖Ψ‖=200 m×200 m,l=8 m.仿真數據如圖6所示.

圖6 所需的節點數
由圖6可知,符合預期,k值的增加,增加了所需的節點數.此外,除了k=1外,矩形模型所需的節點數最少.原因在于:k值越高,跟蹤重疊區域越多,這就增加所需的節點數.
然后,考慮k值對節點的跟蹤距離范圍的影響.仿真參數:m=1、Rs=45 m、‖Ψ‖=200 m×200 m,l=8 m,Np=200.仿真數據如圖7所示.
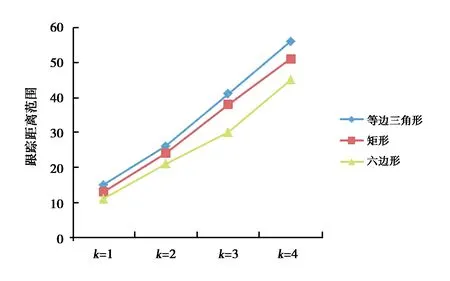
圖7 跟蹤距離范圍
由圖7可知,節點的跟蹤距離范圍隨k值增加而上升.原因在于:在固定的節點數和跟蹤角度前提下,k值越大,跟蹤的區域就越大.
4 總 結
針對WSNs中k-目標跟蹤問題,進行分析,并利用定向節點解決k-目標跟蹤問題.基于規則形狀,推導了最優邊長和所需的節點數,并優化部署節點,進而解決目標跟蹤問題.最終,通過數值證實分析的正確性.本文的分析給設計基于WSNs的目標跟蹤的節點部署提供參考.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
核科學與工程(2015年4期)2015-09-26 11:59:03
電測與儀表(2015年5期)2015-04-09 11:30:52
