氣體絕緣金屬封閉開關設備檢修機器人研究進展
2020-06-30 09:07:16李文勝劉剛峰麥曉明
科學技術與工程 2020年15期
李文勝, 劉剛峰, 聶 銘, 王 偉, 麥曉明, 吳 昊, 趙 杰
(1. 廣東電網有限責任公司電力科學研究院,廣州 510080;2.哈爾濱工業大學機器人研究所,哈爾濱 150040)
氣體絕緣金屬封閉開關設備(gas-insulated metal-enclosed switchgear,GIS)被廣泛應用于電網[1-3]。一旦GIS內部發生故障(如廣東電網東莞500 kV橫瀝站“4·11”事件[4]),輕則損失負荷、影響設備安全,重則導致大面積停電,對整個電網的安全穩定運行造成很大影響。由于GIS是多種復雜元器件組合的大型電網設備,導致其故障成因復雜,故障點難以發掘,故障難以排除[5-7]。GIS設備的故障主要有生產、運輸、安裝等不合格或溫度、壓力、震動頻率變化引起的機械故障[8-9]以及顆粒物、突起、接觸不良引起的絕緣故障等[10-11]。
除了對某些特定故障如局部放電等需要特定的檢測手段和設備以外[12-13],目前GIS內部故障點查找的普遍手段是人員入罐檢查,內窺鏡檢查[14]和X射線透視檢查[15-16]作為輔助手段。人員入罐檢查存在狹小空間活動受限,經驗判斷,工作效率低,易污染GIS內部,接觸有毒氣體或化合物,密閉空間作業人身風險大、勞動強度大,人力、設備、資金投入大等缺點。內窺鏡檢查難以縱深檢查,視場受限,成像效果有待改進。X射線透視檢查則存在獲取的結構信息不夠全面和直接,檢測部位受限,費時費力,輻射風險大等問題。
GIS設備內部的缺陷或事故處理以及計劃檢修均人為拆解設備[17],人員須進入GIS罐內,特別是母線設備[18],存在停電范圍大、作業風險高、流程項目多、持續時間長、資金費用高等缺點。研制GIS腔體微型機器人[19-20]代替人員入罐巡視檢查、快速查找故障點,避免人員接觸有毒氣體或化合物,并可進入狹小空間完成人員無法觸及的部位,減少作業時間[21],具有明顯的安全和經濟效益。
以廣東電網為例,截至2017年底,GIS掛網運行間隔數共4 999個,其中2017年新增GIS間隔379個。此外,廣東電網GIS間隔投運年限以6~15 a為主,40%開始進入10 a以上,需要加強維護。針對新增間隔安裝調試檢查和運行間隔開蓋檢修維護,廣東電網對GIS腔體機器人的年需求量可達一千次。因此,研制GIS腔體檢修機器人對電網安全生產作業十分必要。
1 中外相關技術研究現狀
近年來,電力系統機器人技術[22]發展較為迅速[23-24],特別是變電站巡檢機器人[25-27]、架空輸電線路[28-29]和高壓電纜巡檢機器人[30-31]以及電纜隧道巡檢機器人[32-33]已陸續研發出樣機,并取得一定程度的實際應用。然而,GIS設備腔體檢修機器人的研究少見報道。目前,機器人技術已經發展到較高的水平[34],具備應用到GIS腔體檢修的技術條件[35]。
文獻[36]重點介紹了管道機器人的研究應用情況。管道機器人是一種可沿細小管道或外部自動行走、攜帶一種或多種傳感器及操作機械,在工作人員的遙控操作或計算機自動控制下,進行一系列管道作業的機、電、儀一體化系統。經過多年的研究和發展,國內外在管道機器人領域取得了較多的成果,研制了一系列不同結構和驅動形式的管道機器人產品或樣機[37]。
日本東芝公司Suzumori等[38]于1999年研制了一種用于管道內徑φ25.4 mm的微型管道檢測機器人(圖1),機器人前端安裝有高分辨率的小型CCD攝像機和用于微小目標作業的微操作手。韓國成均館大學Kim等[39]研制了MRINSPECT系列(Ⅰ~Ⅶ)管道機器人(圖2),其中MRINSPECT Ⅶ可適應管徑φ150~200 mm。瑞士Fabien等[40]研制了具有高移動性能的磁力輪式機器人(圖3),可用于對結構復雜的鐵磁體管道進行無損檢測,可適應內徑φ200~700 mm的管道。日本九州工業大學Nassiraei等[41]研制了用于下水管道的智能檢測移動機器人KANTARO(圖4),采用無纜作業方式,可適應內徑φ200~300 mm的管道,攜帶魚眼攝像頭、激光掃描儀、紅外傳感器對管道進行檢測,可順利通過彎管和支叉管。韓國漢陽大學利用扭力彈簧設計了一種可以具有可折疊鏈輪機構的小型管道機器人[42]。加拿大多倫多大學設計了一種帶有自鎖機構以提高牽引能力的小型管道機器人并進行了測試[43]。美國紐約煤氣集團公司Vradis G C和卡內基梅隆大學Schempf H開發了用于地下煤氣管道檢測的管道機器人系統 EXPLORER[44](圖5),機器人自攜電池,采用無線通信方式,一次作業距離可達500 m,可通過90°彎管和T形管道,利用機器人前端“魚眼”攝像頭對管道內部狀態進行觀察。
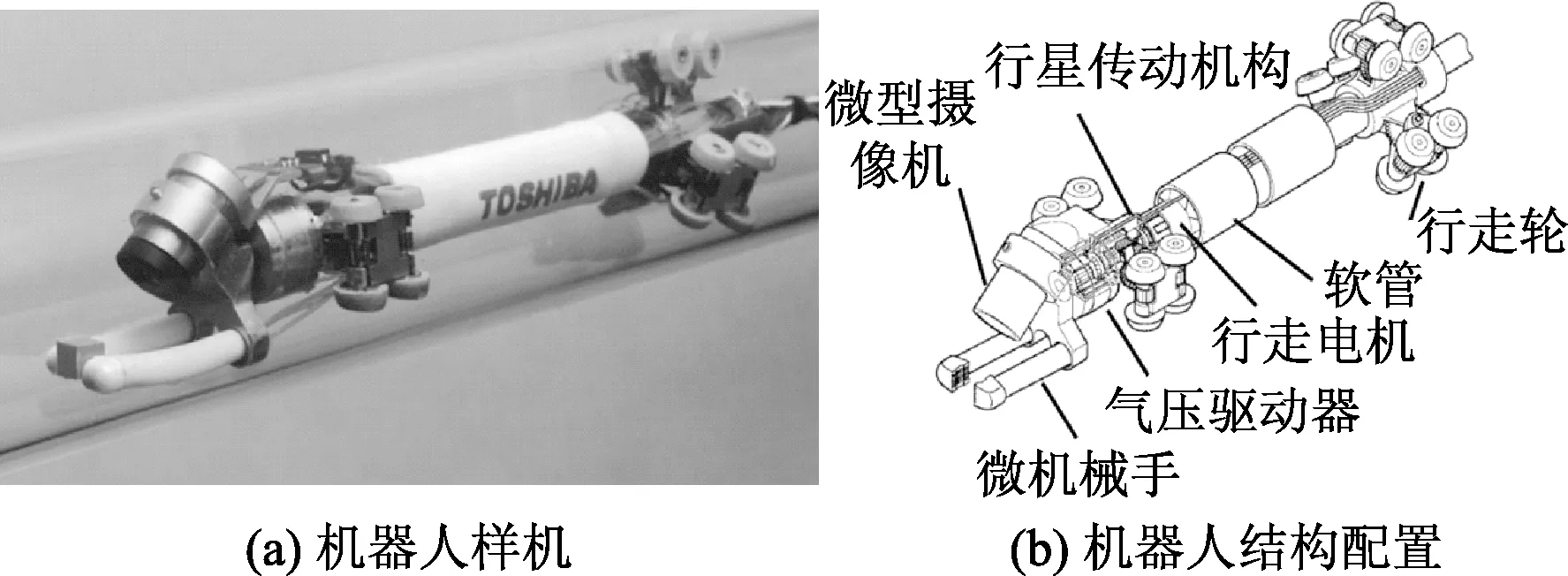
圖1 日本東芝公司開發的微型管道檢測機器人Fig.1 Micro pipe-inspection robot carrying a recovered object in a 1-in pipe developed by Toshiba
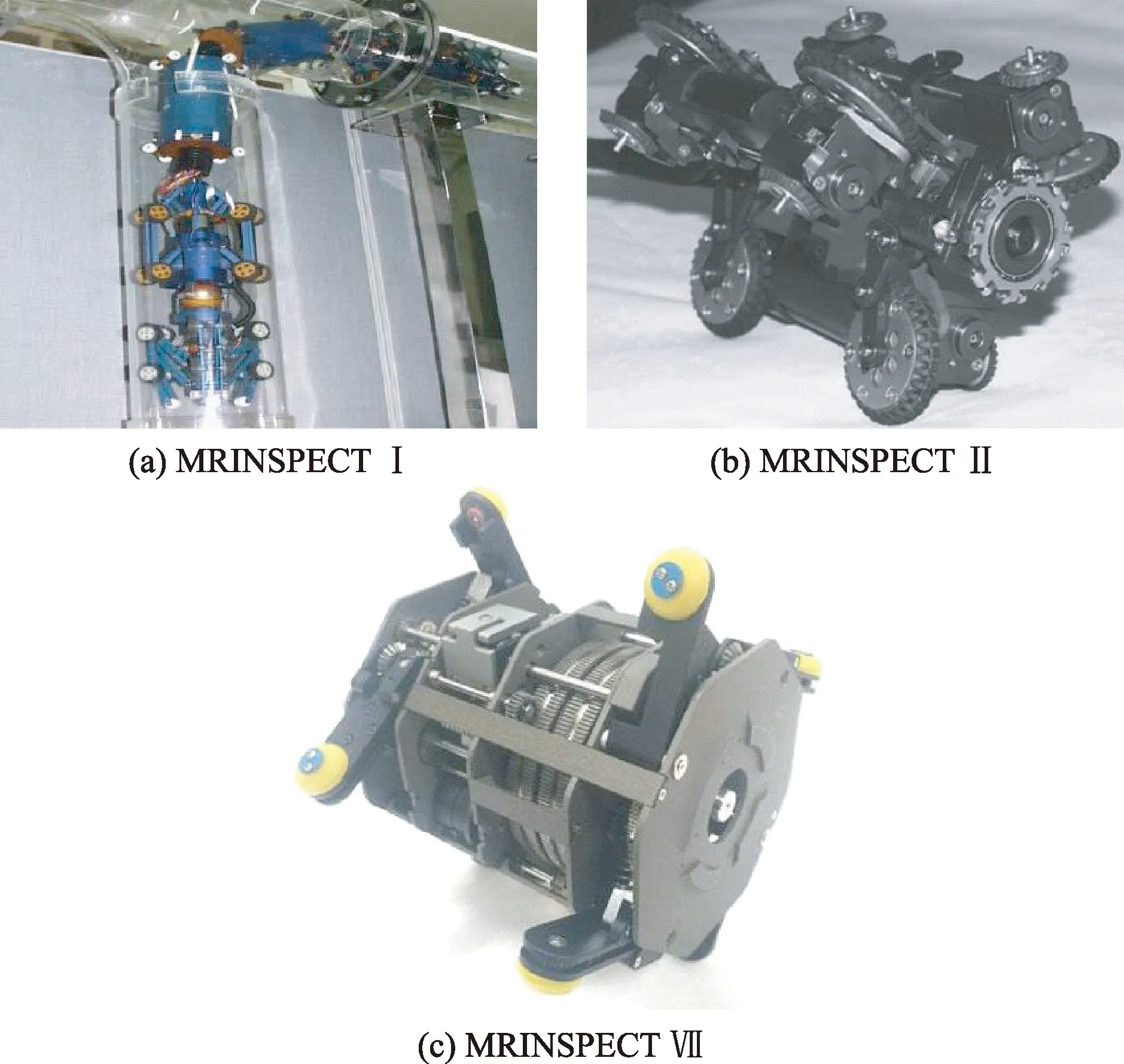
圖2 MRINSPECT系列管道機器人Fig.2 MRINSPECT series pipeline robot

圖3 磁力輪式管道機器人MagneBikeFig.3 Magnetic wheels pipe robot MagneBike
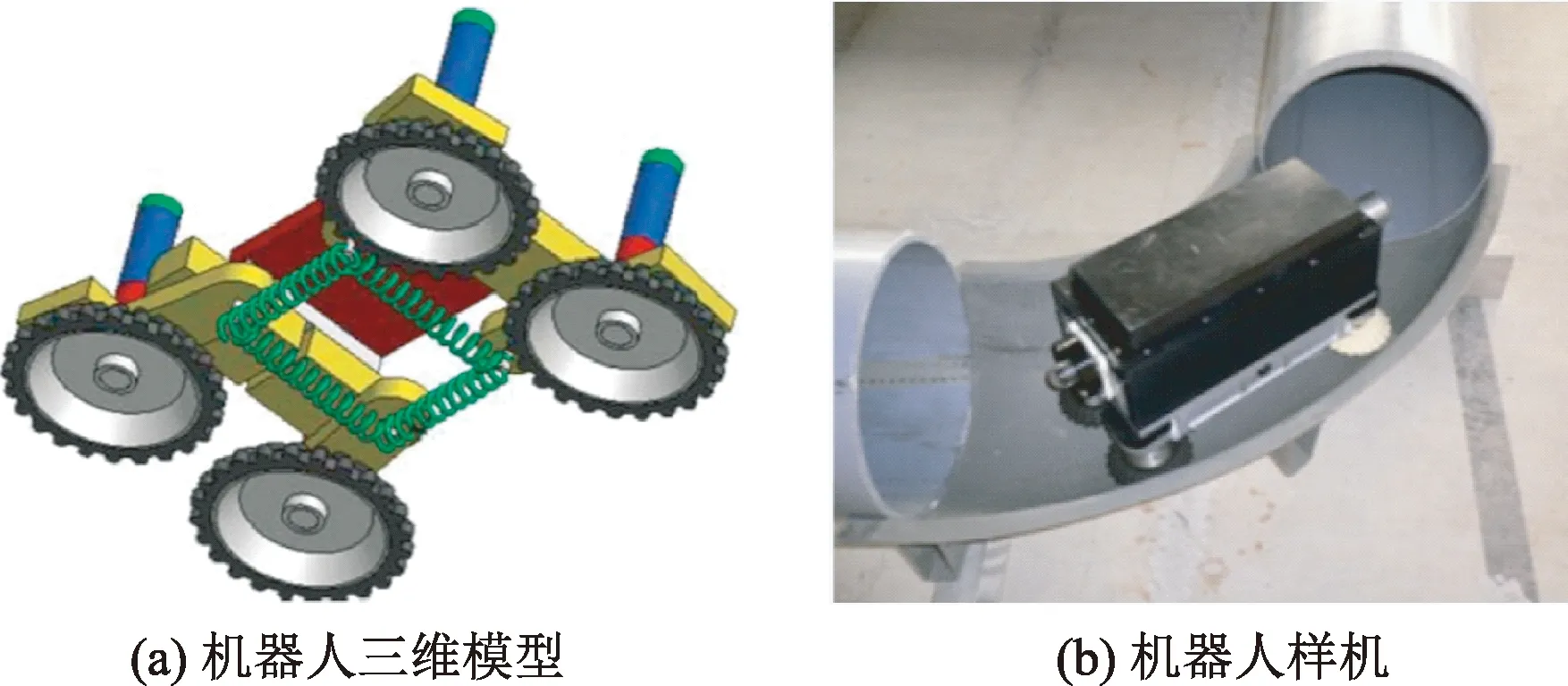
圖4 管道檢測機器人KANTAROFig.4 Pipe inspection mobile robot KANTARO

圖5 煤氣管道檢測機器人EXPLORERFig.5 Gas pipe detection robot EXPLORER
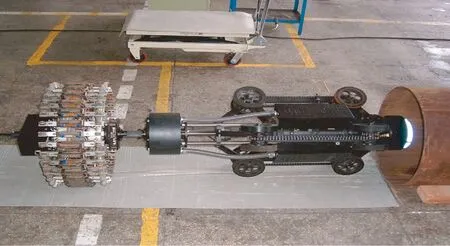
圖6 煤氣管道檢測機器人本體樣機Fig.6 Prototype of gas pipeline inspection robot
張云偉[45]于2007年研制了一種煤氣管道檢測機器人系統(圖6),利用攝像頭對管道內部信息進行采集,利用漏磁檢測對管壁進行無損檢測,采用視覺導航技術和差動控制使機器人通過彎管或T型管道,適應管徑φ400~600 mm,采用拖纜方式,單程運動距離可達1 000 m。李鵬等[46]于2009年研制了一種采用螺旋驅動具有管徑自適應和速度自適應功能的管內探測機器人(圖7),在內徑為190、180 mm的管道進行了行走與越障試驗。哈爾濱工業大學[47- 48]針對海底管道系統于2011年研制了一種具有差動運動功能的環境自適應三軸差動式輪式管道機器人(圖8),具有良好的彎管通過性能,在φ310 mm的管徑進行了樣機試驗。西華大學與香港大學合作開發了一系列管道機器人[49],于2011年研制出被動螺旋式管道機器人實驗樣機,2012年研制出履帶式螺旋管道機器人,2013年開展了基于遺傳算法的錐彈簧連接蠕動式管道機器人行走控制研究,2014年研制出主動螺旋驅動式管道機器人[50](圖9)。天津大學、上海大學、國防科技大學等[51-53]也對管道機器人進行了代表性的相關研究。
國網寧夏電力公司和四川大學在2017年研制出一種GIS罐體內部異物顆粒清理機器人[54](圖10),實現了GIS設備內部可視化異物清理功能。該機器人采用輪式爬坡,在橫向移動方面存在嚴重限制,其躲避障礙和執行作業能力受到影響。此外機器人智能化程度有待提高。云南電網有限責任公司與華北電力大學在2017年研制出GIS管道檢測機器人試驗樣機,針對樣機的運動性能進行了仿真分析和實驗室測試[55]。
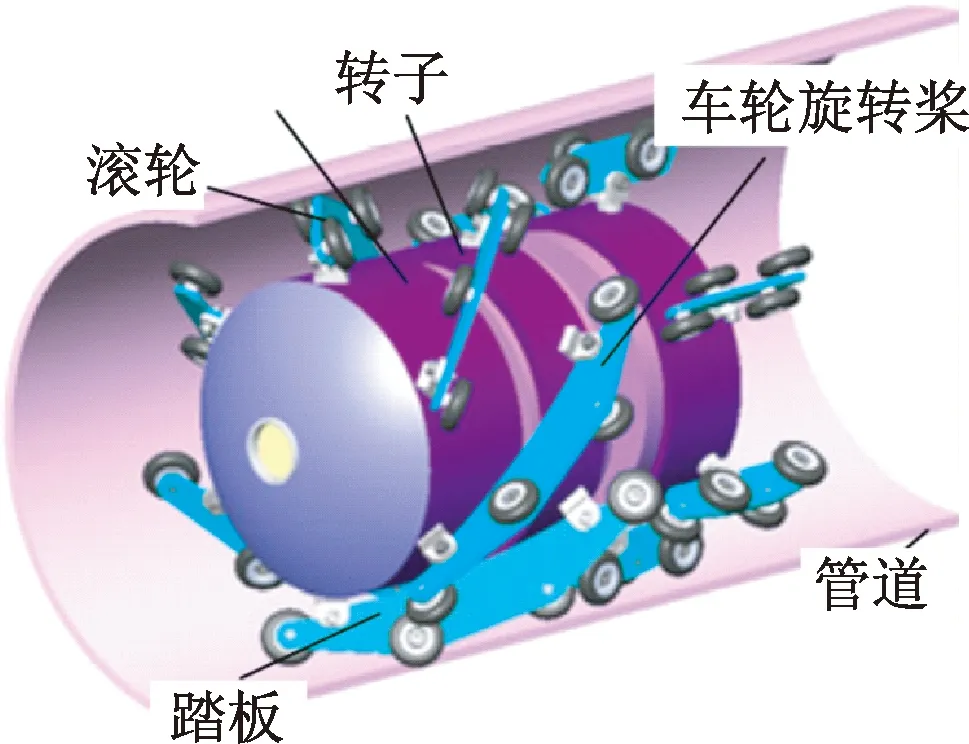
圖7 管道機器人MMU3Fig.7 In-pipe inspection robot MMU3
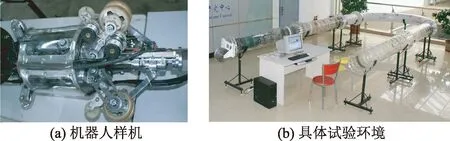
圖8 三軸差動式管道機器人Fig.8 Tri-axial differential pipeline robot

圖9 主動式管道機器人Fig.9 Active pipeline robot
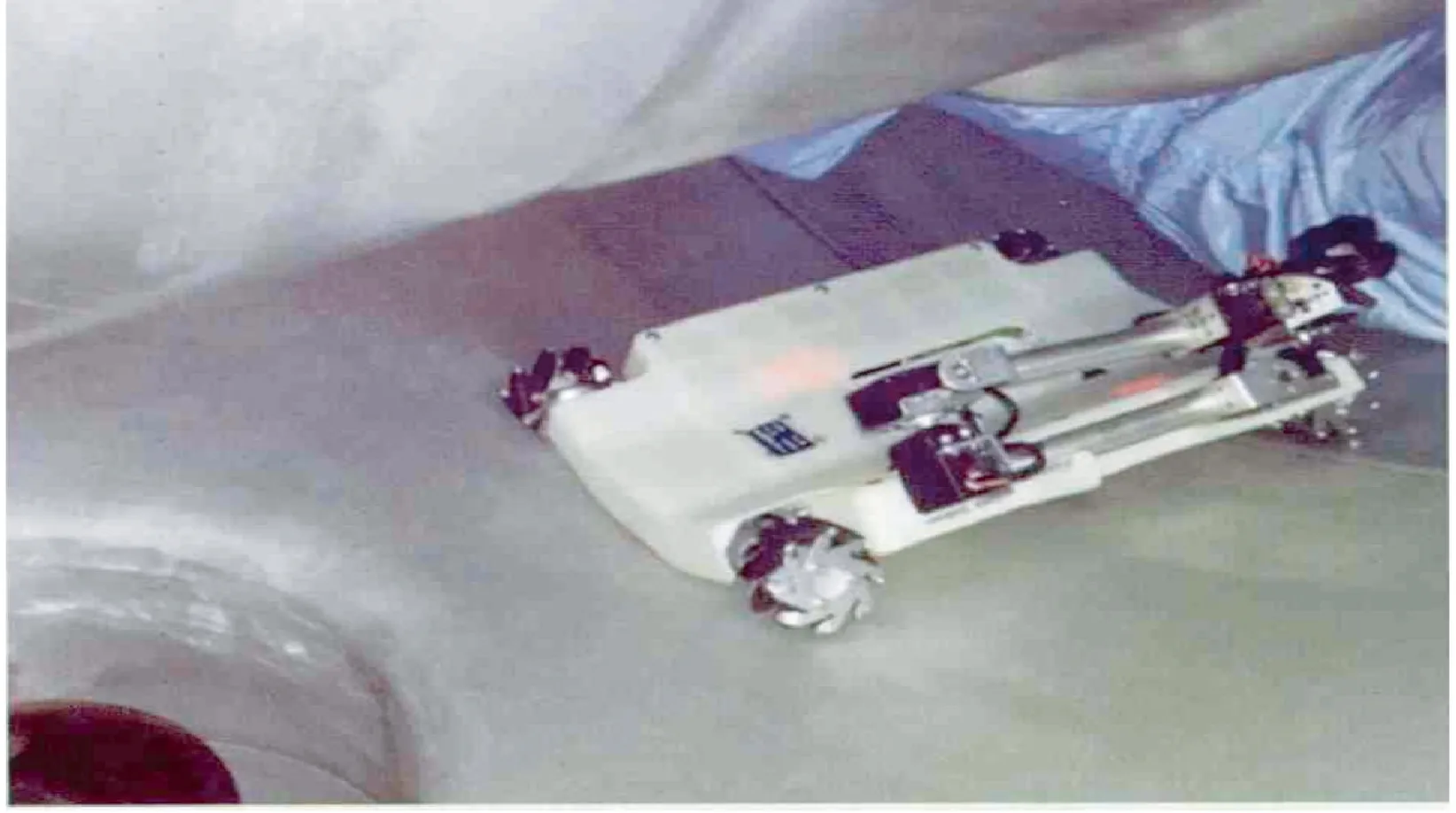
圖10 GIS罐體內部異物清理機器人Fig.10 Cleaning robot inside the GIS cavity
2 GIS管道檢修機器人關鍵技術
利用管道機器人最新技術[56],并且根據實際需求相應發展這些技術,使之適應電網GIS設備內部巡視檢修的需要。GIS腔體機器人研究的關鍵技術點如下。
2.1 機器人本體結構與驅動設計
根據GIS腔體內部結構特點和機器人功能需求,設計適用于GIS腔體的機器人本體結構[57-58],包括微型機器人本體、可視化檢測云臺;研究適用于GIS內部復雜環境的驅動方式[59],具備GIS設備水平管道自主行走能力,具備一定的水平偏移角度的適應能力[60],實現過彎、越障(筒體伸縮節、焊接接頭等行走障礙),研究適應于垂直管道運動的機器人吸附方式[61- 62]和材料設計。
2.2 機器人導航和定位設計
研究基于多傳感融合的復雜GIS管道環境下機器人定位[63]和自主避障[64- 65]及自適應導航[66],以及機器人運動狀態參數及管道環境的自主識別問題[67],最大程度減少機器人對GIS氣室的筒內壁、母線導體及支撐絕緣子等碰撞、刮傷和磨損,研究機械臂和云臺避障策略。
2.3 機器人能源供給和通信設計
針對目前限制管道機器人廣泛應用的能源供給問題,開展應用研究和設計,提高機器人能源供給系統的效率和可靠性,滿足GIS腔體機器人的實際需求[68]。針對GIS機器人因管道金屬壁的電磁屏蔽作用導致通常的高頻無線電信號難以穿過管壁,研究適用于機器人與GIS外部的通信方式[69]。
2.4 機器人巡視和故障點查找功能實現
硬件系統的實現:多傳感器的應用和融合,微傳感技術的應用。軟件系統的實現:管道內部復雜結構全視野圖像獲取[70],三維場景重構;內部異物、放電痕跡、觸頭燒損、絕緣子裂紋、螺栓松脫、導體錯位脫落等典型故障缺陷圖像庫建立,基于人工智能和深度學習的圖像智能識別、故障缺陷識別定位研究[71]。
2.5 機器人可靠性和環境適應性設計
基于復雜管道環境的機器人可靠性設計,基于罐體潔凈干燥要求的防護設計(防污染設計);避免機器人對管壁及部件造成刮碰磨損。機器人的引入應不破壞GIS內部氣室氣體的絕緣,不破壞GIS管壁和內部設備,機器人自身可靠。
2.6 GIS腔體機器人樣機實驗室功能驗證
針對GIS腔體巡視任務,建立機器人操作演示示范應用平臺,實現機器人可在GIS內部的自主運動、巡視和故障點查找基本功能。
目前,筆者團隊已研究設計GIS腔體檢修機器人初步樣機(圖11),其主要結構組成包括:①沿圓形管道吸附的真空吸盤;②沿管道縱向移動或沿圓弧移動的麥克納姆輪;③檢修機械臂及作業末端。
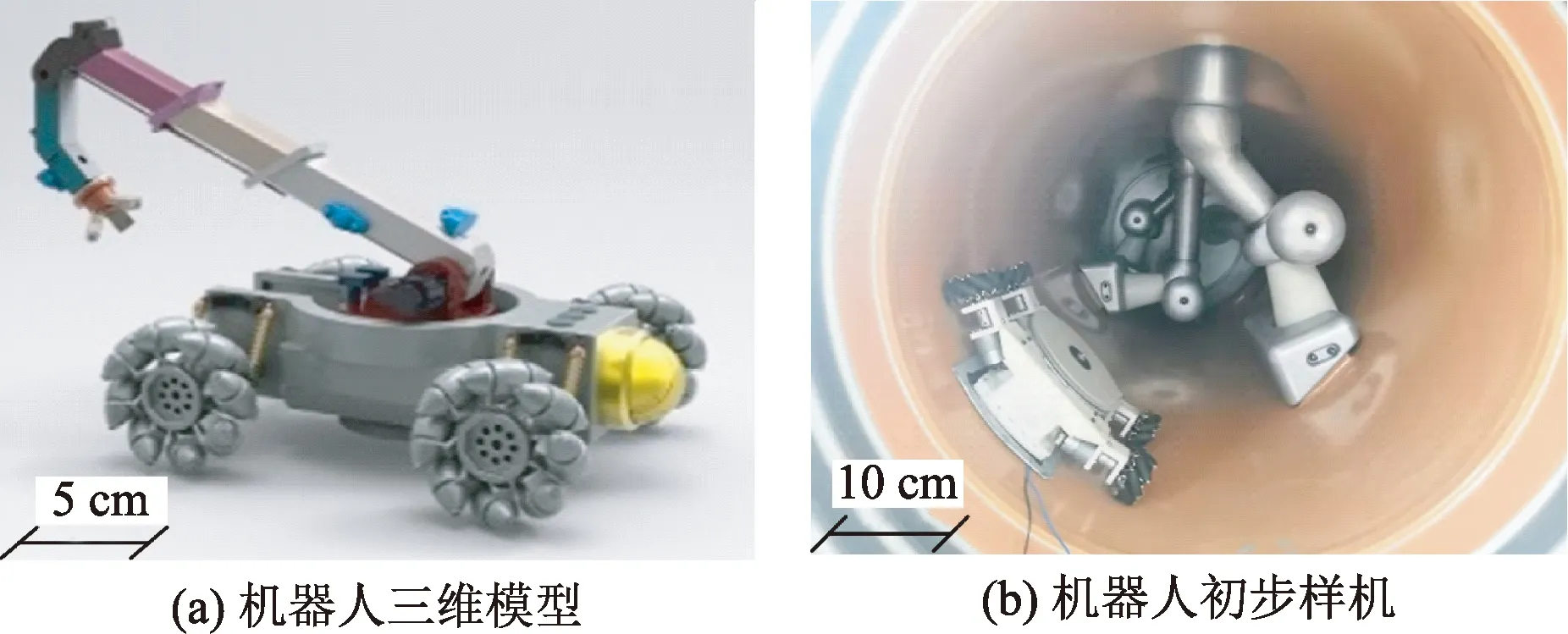
圖11 GIS腔體檢測機器人模型與樣機Fig.11 Prototype of GIS cavity inspection robot
該機器人可在遠程遙控或自主作業條件下,通過吸附管壁和輪式移動,實現沿管壁環向和軸向的復合運動,做到一邊吸附、一邊移動、一邊作業,從而為GIS腔體檢修提供了一種全方位的作業工具。
3 結論與展望
電網實際生產對GIS腔體機器人的應用需求日益增大。隨著GIS腔體機器人的研究工作的逐步深入,目前已研制GIS腔體機器人實驗室樣機,然而距離實際應用仍有較大距離。未來對于GIS腔體機器人的研究將集中在以下方面。
(1)構型及結構優化。探索新的構型和結構材料,進一步減輕體積和質量,提高負載-自重比,更好地適應GIS不同型號和結構尺寸、適應水平與垂直管道,具備良好的過彎和越障性能。機構設計向著模塊化、可重構的方向發展,機器人可集成多傳感檢測、可實現多傳感器信息融合。
(2)實時控制及能源供給。在復雜多變的腔體環境中實現實時可靠的控制、通信、定位和穩定可靠的能源供給。
(3)人工智能技術的融合應用。一方面具備必要的人機交互功能,檢修人員可通過機器人實時掌握GIS腔體內部的實時狀況;另一方面基于人工智能技術開發故障缺陷圖像的自主識別。
(4)技術標準和規范。形成GIS腔體機器人本體、運行與維護規范、能源供給系統和試驗與測試等技術標準和規范。形成基于機器人技術應用的GIS設備檢修作業技術標準和安全規程。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
汽車維修與保養(2019年7期)2020-01-06 03:30:42
故事大王(2016年7期)2016-09-22 17:30:08
汽車維護與修理(2016年10期)2016-07-10 08:17:41
海峽科技與產業(2016年3期)2016-05-17 04:32:12
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
