胡蘿卜聯合收獲機高效減阻松土鏟設計與試驗
2020-06-29 01:17:16王金武高鵬翔那明君周文琪
農業機械學報 2020年6期
關鍵詞:作業
王金武 李 響 高鵬翔 那明君 王 奇 周文琪
(東北農業大學工程學院, 哈爾濱 150030)
0 引言
我國胡蘿卜種植面積和總產量均居世界第一位,但大多數地區的胡蘿卜收獲仍然采用人工與半機械化結合的收獲方式[1]。人工收獲勞動強度大、效率低,半機械化收獲經濟成本高,因此無法滿足胡蘿卜規模化收獲要求。松土是胡蘿卜機械化收獲的重要環節,松土質量直接影響前進阻力、漏拔率等技術指標。因此,提升胡蘿卜聯合收獲機松土鏟的作業性能是推進胡蘿卜機械化收獲的有效途徑。
目前,國內外學者對胡蘿卜聯合收獲機松土鏟鮮有研究。相關研究多對耕地部件深松鏟進行結構設計與優化[2-4],且主要針對深松鏟進行結構設計,并未結合胡蘿卜生產模式及收獲農藝要求研制專用松土鏟,常規深松鏟適應性較差,影響機具作業質量。
仿生學作為一門新興工程學科,已在工程領域得到了廣泛應用[5]。張金波等[6]對小家鼠爪趾曲線進行擬合,設計了刃口為指數函數曲線型的減阻深松鏟,試驗表明,仿生設計可以顯著降低深松鏟的耕作阻力,有效提升松土部件的作業性能。
本文基于仿生學原理與部件-土壤間力學模型分析,設計一種高效減阻松土鏟。利用離散元法建立部件-土壤-作物多元仿真模型,結合試驗優化和回歸分析等方法,探究松土鏟結構參數對胡蘿卜聯合收獲機松土鏟作業質量的影響,以期解決胡蘿卜聯合收獲機松土鏟土壤擾動小、前進阻力大和漏拔率高等問題。
1 結構與工作原理
胡蘿卜聯合收獲機松土鏟安裝位置位于帶輪正下方,由仿生鏟尖、松土鏟翼和破土鏟柄組成。破土鏟柄位于機具正下方與機架連接,松土鏟翼與仿生鏟尖位于帶輪正下方與鏟柄固接,如圖1所示。

圖1 高效減阻松土鏟結構圖Fig.1 Structure diagram of high efficiency drag reducing shovel1.仿生鏟尖 2.松土鏟翼 3.破土鏟柄 4.機架 5.清土輥 6.松土鏟 7.輸送梁 8.帶輪 9.扶禾器 10.土壤與胡蘿卜
工作時,整機由拖拉機牽引向前運動,松土鏟對胡蘿卜行間土壤進行擾動,降低胡蘿卜與土壤間的粘附作用。胡蘿卜通過扶禾器作用后旋轉處于直立狀態,并在輸送帶的作用下,向后方夾持輸送,完成胡蘿卜松土、挖掘和輸送作業。
2 關鍵部件設計
2.1 仿生鏟尖
通過對狗獾前爪趾結構進行研究[7-9],發現其爪趾尖部呈錐形,狗獾在挖掘土壤過程中,其爪趾的運動方式同松土鏟的工作過程極為相似。即以水平運動為主,通過爪趾的移動切碎土壤。因此,以狗獾爪趾作為研究對象,將爪趾相關曲線結構應用于松土鏟鏟尖的結構設計中。
為精準擬合狗獾爪趾特征,基于逆向工程理論[10],取狗獾前爪中指利用先臨三維公司生產的EinScan Pro 2x型非接觸式三維掃描儀進行掃描,如圖2所示。在掃描創建網格階段,對獲得的點云數據依次進行“采樣”、“平滑”和“雜點消除”處理,使得點云得到優化進而得到更高質量的點云數據[11]。在Geomagic Design X軟件中對優化后的點云模型進行封裝和填孔得到狗獾爪趾三維模型,如圖3所示。

圖2 狗獾爪趾取樣掃描Fig.2 Sampling and scanning of badger claw

圖3 狗獾爪趾點云與三維模型Fig.3 Point cloud and 3D model of badger claw
為確定狗獾爪趾內側結構參數,對狗獾爪趾內側曲線進行提取[12]。首先,將狗獾爪趾三維模型導入SolidWorks軟件中,采用手動取點的方式按順序依次取點,如圖4所示,對每個點進行測量,獲得其點坐標數據,將所取得的點的位置坐標導入函數繪圖軟件Origin Pro中進行曲線擬合,得到爪趾內側曲線的擬合方程

圖4 狗獾爪趾內側擬合曲線Fig.4 Fitting curve of inner side of badger claw
(1)
擬合曲線決定系數R2=0.958 15。
為進一步探究仿生鏟尖減阻機理,分別以仿生鏟尖(圖5a)與鑿式鏟尖(圖5b)為例,對土壤-鏟尖進行力學對比分析,如圖6所示。

圖5 鏟尖結構對比簡圖Fig.5 Comparison diagrams of shovel tip structure

圖6 土壤顆粒與松土鏟尖力學對比分析Fig.6 Comparative analysis of mechanics between soil particles and tip of shovel
以仿生鏟尖為例,當土壤顆粒接觸鏟尖表面時,存在相對速度v,其可以分解為切向速度v1與法向速度v2,法向速度v2全部轉化為阻力F1阻礙鏟尖向前運動,阻力F1又可分解為水平方向的水平阻力Fd1與豎直方向的垂直阻力Fv1,垂直阻力Fv1對鏟尖產生正壓力的同時也表現為鏟尖所受摩擦力,仿生鏟尖前進阻力Fj1由水平阻力Fd1和鏟尖所受摩擦力的水平分力Ff1組成。
(2)
(3)
Ff1=μ1Fv1sin2δ=μ1F1sin3δ
(4)
(5)
v2=vcosδ
(6)
其中m——顆粒質量,kg
a——加速度,m/s2
v0——前進末速度,m/s
t——作用時間,s
δ——仿生鏟尖速度v與法向方向夾角,(°)
μ1——鏟尖與土壤間摩擦因數
由式(5)可知,μ1sin3δ遠小于cosδ,則式(5)可簡化為
(7)
同理鑿式鏟尖所受前進阻力Fj2表達式為
(8)
式中η——鑿式鏟尖速度v與法向方向夾角,(°)
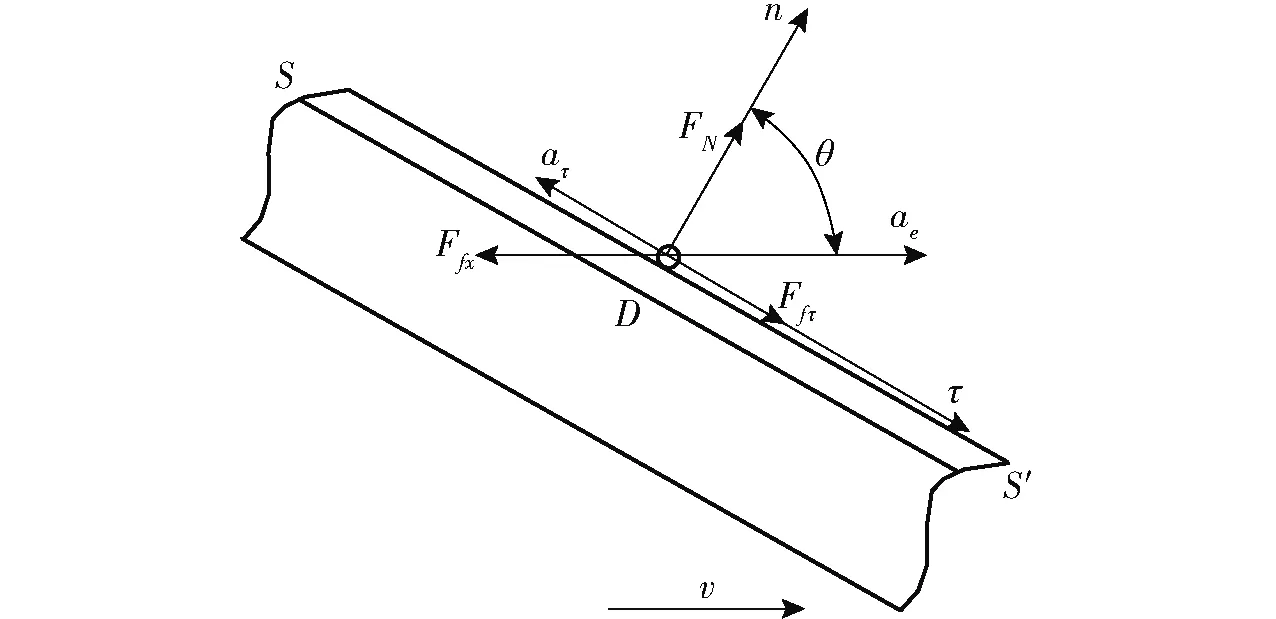
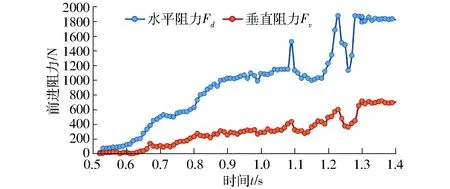
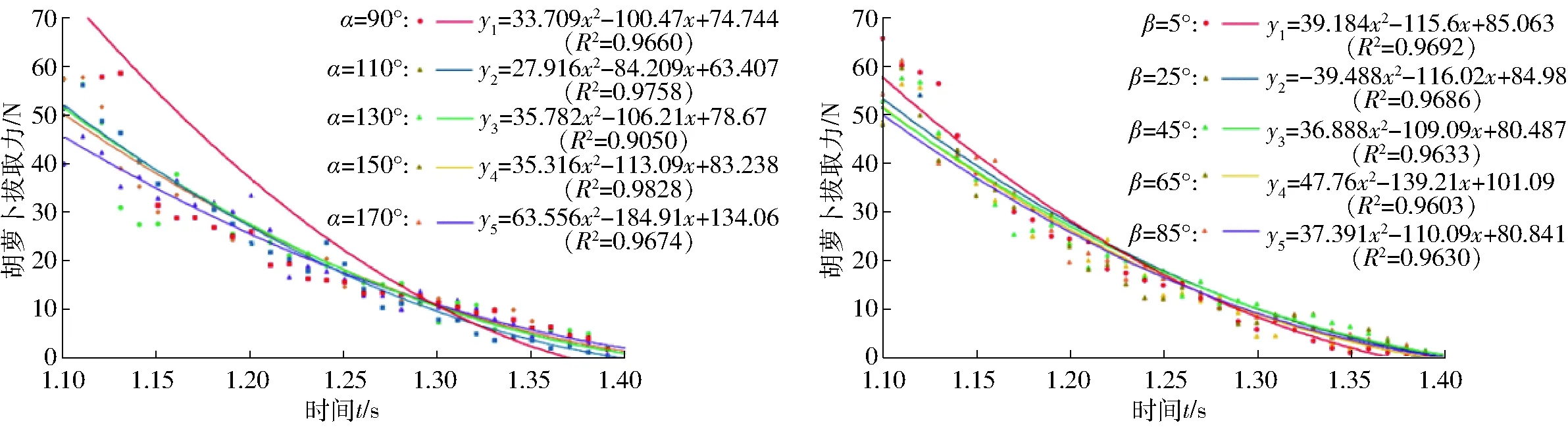
當土壤顆粒開始接觸鏟尖時δ=η,隨著土壤顆粒沿鏟尖內側滑動可得δ>η,即Fj1 根據計算結果,當松土鏟尖以相同的速度沖擊土壤顆粒,由于仿生鏟尖內側曲線的特殊結構形式,使得土壤顆粒水平初速度v在垂直接觸點切線方向的分速度所產生的阻力明顯小于鑿式鏟尖,因此,仿生鏟尖的土壤阻力要小于其它類型鑿式鏟尖。 將狗獾爪趾三維模型導入SolidWorks軟件中,進行等比放大,為保證其工作適應性,根據胡蘿卜種植模式與生長特性,并參考現有松土鏟結構參數及入土角,放大倍數選取10倍,松土鏟入土角γ=25°。此時,入土高度d1=97.8 mm,入土寬度d2=68 mm。 鏟翼可以增加土壤擾動范圍[13-14],減小胡蘿卜拔取力,但增加鏟翼后松土鏟前進阻力明顯升高。為探究鏟翼結構最優參數,建立鏟翼與土壤間力學接觸模型,對鏟翼進行受力分析。在鏟翼表面任意一點建立空間直角坐標系Oxyz,y軸為松土作業時鏟翼前進方向,z軸為豎直方向,x軸為水平面內與y軸垂直方向。分析鏟翼與土壤顆粒接觸時的受力情況,包括鏟翼受到的土壤支持力N(與z軸夾角為90°-α/2)、鏟翼受到的土壤摩擦力f(在yz平面上)和其自身重力G。鏟翼受到的合力即為鏟翼前進阻力Fy,方向與其前進方向相反。如圖7所示,可得平衡方程 (9) f=μ2N (10) (11) 將式(9)和式(10)代入式(11)得 (12) 式中μ2——鏟翼與土壤間摩擦因數 α——鏟翼開角,(°) β——鏟翼傾角,(°) 圖7 鏟翼力學分析Fig.7 Mechanical analysis of shovel wing 由式(12)可知,松土鏟翼前進阻力Fy與鏟翼開角α、鏟翼傾角β有關,后文將通過EDEM仿真試驗探究其最優參數組合。 鏟柄刃口曲線上任意一點的法線與該點運動速度方向之間的夾角定義為滑切角,而滑切作用的大小主要取決于滑切角的選取[15-16],對鏟柄進行力學分析,如圖8所示。 圖8 鏟柄滑切力學分析Fig.8 Stress analysis of sliding cutting of shovel handle 鏟柄的設計滑切角需大于摩擦角。考慮到滑切角過小滑切效應不明顯,滑切角過大會引起鏟柄整體尺寸過大以及由此引發的強度不足和干涉等問題,結合黑龍江地區土壤特性與胡蘿卜種植模式,選取滑切角θ=44.5°。 運用離散元仿真軟件EDEM建立部件-土壤-作物多元仿真模型,以前進阻力和胡蘿卜拔取力為主要評價指標,在常規工況下對胡蘿卜聯合收獲機田間作業狀態進行模擬,分析影響機具作業性能的主要因素,為后續仿真優化及田間試驗驗證奠定基礎。 3.1.1松土鏟及胡蘿卜仿真模型 為合理有效地進行仿真模擬與計算,對整機模型簡化處理,去除其牽引機具及各級傳動箱體等部件[17]。應用三維制圖軟件SolidWorks對機具進行實體建模(比例1∶1),以.step文件格式導入EDEM軟件中,根據物理樣機試制特點,松土鏟材料屬性為65Mn鋼,泊松比為0.35,剪切模量為7.8×1010Pa,密度為7 850 kg/m3。 為精準模擬胡蘿卜與土壤間的接觸關系,取若干胡蘿卜利用先臨三維公司生產的EinScan Pro 2x型非接觸式三維掃描儀對胡蘿卜進行掃描,建立胡蘿卜三維模型,如圖9所示,并將其導入EDEM仿真土槽中。 圖9 胡蘿卜點云與三維模型Fig.9 Carrot point cloud and 3D model 3.1.2土壤顆粒模型 建立準確的土壤顆粒模型是保證仿真結果有效性的基礎。現有研究表明,土壤顆粒的基本結構主要包括粒狀顆粒、團粒狀顆粒、片狀顆粒和桿狀顆粒,如圖10所示。在EDEM中設置4種顆粒[18-20],并在土槽中添加顆粒工廠命令進行填充。為保證仿真與實際土壤的一致性,設置EDEM球形填充單元半徑為3 mm。 圖10 土壤顆粒離散元模型Fig.10 Discrete element simulation models of soil particles 為準確模擬機械部件-土壤-胡蘿卜狀態,土壤顆粒黏結力主要根據其內部黏聚特性設定,將其內部黏結、內聚、摩擦及破碎等關系簡化為Hertz-Mindlin with bonding接觸模型[21]來模擬土壤顆粒間、顆粒與邊界間的相互作用。 3.1.3其他仿真參數設定 將所建立的松土鏟、胡蘿卜三維模型和土壤顆粒模型導入EDEM軟件中,通過其前處理模塊(Creator)依次對接觸力學作用關系和顆粒工廠進行設置。其中接觸力學模型的選擇是分析部件-土壤-作物間黏結作用的重要基礎,直接影響部件與顆粒間作用關系,根據斜面法測量得到具體參數如表1所示。 表1 離散元模型基本參數Tab.1 Basic parameters of discrete element model 為模擬實際胡蘿卜聯合收獲作業狀態,運用EDEM軟件建立虛擬土槽,設置土槽基本尺寸(長×寬×高)為400 mm×400 mm×500 mm,將其設定為虛擬顆粒工廠,以10 000個/s的速率生成初速度為0 m/s的土壤顆粒模型,總量為100 000個,生成顆粒總時間為10 s,保證土槽內存有充足顆粒進行仿真。在生成顆粒過程中,使其僅在重力作用下自由沉降,且整體生成后在顆粒群上方加載校準土壤密度所需的垂直載荷,進行土壤模型壓實,使仿真與實際土壤保持一致。 3.2.1虛擬仿真過程 在虛擬作業過程中,設置松土鏟位于土槽一側進行初始作業,如圖11所示。根據黑龍江省胡蘿卜種植模式與農藝要求,胡蘿卜根部長度約為150 mm。為保證胡蘿卜順利拔取,設定松土鏟入土深度250 mm,鏟翼寬度125 mm,設置松土鏟前進速度0.7 m/s,胡蘿卜拔取速度0.4 m/s。為保證仿真的真實性,要求鏟尖運動到胡蘿卜下方時胡蘿卜開始向上運動。為保證仿真的連續性,設置其固定時間步長為5.76×10-5s(即Rayleigh時間步長的10%[22-25]),總時間為1.6 s,網格單元尺寸為5 mm,為顆粒平均半徑的3倍,以便對后續數據精準處理。通過仿真可得到松土鏟對土壤的擾動情況,從EDEM后處理工具中導出胡蘿卜拔取過程中胡蘿卜所受土壤顆粒阻力以及前進阻力的實時數據[26]。 圖11 EDEM虛擬仿真過程分析Fig.11 Analysis of virtual simulation process of EDEM 3.2.2虛擬仿真評價指標 由于目前國內外尚無評價胡蘿卜聯合收獲作業質量的統一標準,查閱相關資料并結合實際胡蘿卜種植農藝要求,選取松土鏟前進阻力及胡蘿卜拔取力為虛擬仿真分析的評價指標。 (1)松土鏟前進阻力 前進阻力是衡量機具綜合性能的主要技術參數,直接體現整機作業性能[27]。松土鏟前進阻力主要由前部土壤阻力與底部土壤摩擦阻力兩部分組成,通過EDEM軟件對不同時刻松土鏟前進阻力進行測定[28],并將數據導入Excel軟件中進行整理,計算機具各階段阻力變化趨勢,如圖12所示。本研究主要對虛擬仿真狀態下松土鏟作業前進阻力進行測定分析。 圖12 土壤顆粒速度變化分析Fig.12 Analysis of the change of soil particle velocity (2)胡蘿卜拔取力 胡蘿卜與土壤顆粒間也存在著粘結力,胡蘿卜拔取過程中,胡蘿卜與土壤間粘結力較大,造成胡蘿卜纓果結合部斷裂現象,從而導致胡蘿卜漏拔率增加[29-31]。因此,胡蘿卜拔取力是檢驗松土鏟性能的重要指標。當松土鏟運動至胡蘿卜下方時,土壤蓬松度達到峰值,胡蘿卜所需拔取力最小,此時胡蘿卜開始向上運動,運動過程中,由于胡蘿卜與土壤間的粘結力較大,土壤顆粒粘附在胡蘿卜表面,土壤顆粒間粘結鍵開始進一步斷裂。由EDEM后處理命令對不同時刻胡蘿卜拔取力進行數據輸出,拔取時土壤顆粒速度變化如圖13所示。 圖13 土壤顆粒速度流線圖Fig.13 Streamline diagram of soil particle velocity 4.1.1試驗設計 為探究影響胡蘿卜聯合收獲機松土鏟作業質量的主要因素取值范圍,以鏟翼開角α和鏟翼傾角β為試驗因素進行單因素試驗,對松土鏟前進阻力與胡蘿卜拔取力進行測定分析。由上述力學分析可知,胡蘿卜聯合收獲機松土鏟作業質量與鏟翼開角α、鏟翼傾角β等因素密切相關。根據黑龍江地區胡蘿卜種植農藝要求,選取不同鏟翼開角α(90°~170°)和鏟翼傾角β(5°~85°)研究對前進阻力與胡蘿卜拔取力的影響,為后續正交試驗提供理論基礎。 4.1.2單因素試驗結果與分析 將各組數據記錄到Excel軟件中,即可得到不同結構參數下,前進阻力與胡蘿卜拔取力變化規律。 (1)前進阻力變化規律 由圖14可知,松土鏟與土壤顆粒相互作用初期,其前進阻力隨時間增大而迅速增大。土壤顆粒沿鏟尖內側曲線做變加速運動,土壤沿鏟尖上端飛出。仿真作業0.5~0.8 s時,松土鏟前進阻力迅速上升,主要由于土壤整體受到擠壓變形至破碎需要消耗較大能量,松土鏟進行擠壓切削使土壤變形,因克服內部粘結與內聚作用,其變化速率較快。當仿真作業到1.23 s時,前進阻力急劇增加到峰值,主要由于鏟翼進入土壤顆粒中,土壤擾動性增強,造成大量的土壤顆粒粘結鍵斷裂。當仿真運行至1.3 s時,松土鏟完全進入土槽中,前進阻力趨于穩定狀態。 圖14 各階段虛擬作業阻力變化曲線Fig.4 Changing curves of resistance of virtual operation in simulation processes 鏟翼開角α對前進阻力影響如圖15a所示。隨著α的增大,鏟翼擾動范圍增加,破壞土壤內部粘結鍵數量增多,水平阻力Fd也隨著增加,土壤對鏟翼的垂直分力增加,鏟翼開角增加到110°時,垂直阻力接近峰值,后隨著開角的增加,垂直阻力Fv漲幅不大。 圖15 鏟翼開角α和鏟翼傾角β對前進阻力的影響Fig.15 Influence of opening angle α and inclination angle β on forward resistance 鏟翼傾角β對松土鏟阻力影響如圖15b所示。隨著β的增加,鏟翼垂直截面積增大,對土壤的擾動性增強,大面積破壞土壤間粘結鍵,導致松土鏟水平阻力Fd急劇增加,鏟翼的水平截面積增加,土壤對鏟翼的垂直分力增加。當鏟翼傾角超過45°時,鏟翼的水平截面積減小,土壤對鏟翼的垂直分力減小,鏟翼垂直阻力Fv在45°時達到峰值;當鏟翼傾角超過65°時,垂直阻力趨于穩定,變化可忽略不計。 鏟翼開角α和鏟翼傾角β對胡蘿卜拔取力的影響如圖16所示,隨著α增大,鏟翼松土面積增加,胡蘿卜拔取力減小。當α大于150°時,鏟翼觸碰胡蘿卜表面,產生損傷。隨著β增大,鏟翼垂直截面積增加,土壤擾動性增加,胡蘿卜拔取力減小,便于減小漏拔率;當β大于25°時,胡蘿卜拔取力小于胡蘿卜纓果結合部拉斷力峰值,可滿足胡蘿卜聯合收獲要求。 圖16 鏟翼開角α和鏟翼傾角β對胡蘿卜拔取力的影響Fig.16 Influence of opening angle α and inclination angle β on extracting power of carrot 綜上所述,為得到試驗因素最佳工作參數組合,選取鏟翼開角α(110°~150°)和鏟翼傾角β(25°~65°)為試驗因素取值范圍,為后續多因素試驗提供理論基礎。 4.2.1多因素試驗設計 為研究松土鏟性能變化規律,分析影響作業穩定性的主要因素,得到理想參數組合,在前期虛擬模型建立及數值模擬分析基礎上,進行EDEM正交旋轉虛擬仿真試驗研究。結合前期理論分析和單因素預試驗及常規胡蘿卜收獲作業狀態,設定試驗因素編碼如表2所示。 表2 試驗因素編碼Tab.2 Coding of experimental factors 圖17 試驗因素對指標的影響曲面Fig.17 Influence surfaces of experiment factors on indexes 4.2.2多因素試驗結果與分析 采用二因素五水平二次正交旋轉組合設計多因素優化虛擬試驗方案,根據所得數據進行結果分析,并對影響指標的主要因素進行顯著性分析。連續記錄虛擬土槽上穩定工作狀態下松土鏟前進阻力與胡蘿卜拔取力,其他各項參數保持恒定,數據取平均值作為試驗結果。具體試驗方案與結果如表3所示,其中x1和x2為因素編碼值。 通過Design-Expert 8.0.6 軟件對試驗數據進行回歸分析和因素方差分析,篩選出影響顯著因素,得到前進阻力F3和胡蘿卜拔取力F4與因素編碼值間回歸方程 表3 試驗方案與結果Tab.3 Schemes and results of experiments (13) (14) 為直觀地分析指標與因素間關系,運用Design-Expert 8.0.6 軟件得到響應曲面,如圖17所示。 在作業指標滿足胡蘿卜收獲農藝要求下,對各因素影響規律進行分析,根據相關回歸方程和響應曲面中的等高線分布密度可知,鏟翼開角α和鏟翼傾角β對松土鏟前進阻力和胡蘿卜拔取力存在交互作用。由圖17a可知,當鏟翼開角α一定時,隨著鏟翼傾角β的增加,前進阻力增加;當鏟翼傾角β一定時,隨著鏟翼開角α的增加,前進阻力增加;當鏟翼傾角β變化時,前進阻力變化區間較大,因此鏟翼傾角β是影響前進阻力的主要因素。 由圖17b可知,當鏟翼開角α一定時,隨著鏟翼傾角β的增加,鏟翼推土截面積增加,擾動增強,胡蘿卜拔取力降低;當鏟翼傾角β一定時,隨著鏟翼開角α的增加,鏟翼水平面積增加,胡蘿卜拔取力降低;當鏟翼傾角β變化時,胡蘿卜拔取力變化區間較大,因此鏟翼傾角β是影響胡蘿卜拔取力的主要因素。 為得到試驗因素最佳工作組合,對試驗進行優化設計。建立參數化數學模型,結合試驗因素的邊界條件,遵循減阻增擾(減小前進阻力與胡蘿卜拔取力)原則,對機具前進阻力和胡蘿卜拔取力回歸方程進行分析,建立非線性規劃參數模型 (15) 運用Design-Expert 8.0.6軟件中的多目標參數優化(Optimization)模塊對數學模型進行分析求解,可得多組優化參數組合。從優化結果中選取一組合理參數組合,即當鏟翼開角α為120.27°,鏟翼傾角β為47.37°時,機具綜合作業性能較理想,其前進阻力為2 026.35 N,胡蘿卜拔取力為58.53 N。根據所優化的結果進行虛擬仿真驗證,其前進阻力為1 908.76 N,胡蘿卜拔取力為55.37 N,與優化結果基本一致。 為檢驗設計的高效減阻松土鏟作業性能,結合理論分析與仿真模擬結果進行高效減阻松土鏟的試驗。于2018年10月6日在黑龍江省哈爾濱市慶豐村進行田間性能試驗和對比試驗。試驗區土壤質地為黑壤土,運用環刀測試法對不同深度土壤容重進行測量[32],由測量結果可知:0~100 mm范圍內土壤容重為1.236 g/cm3,100~200 mm范圍內土壤容重為1.433 g/cm3,200~300 mm范圍內土壤容重為1.308 g/cm3。高效減阻松土鏟與鑿式松土鏟分別安裝在4UZL-2型自走式胡蘿卜聯合收獲機上,田間試驗現場如圖18所示。 圖18 田間性能試驗Fig.18 Field performance experiment 試驗主要儀器設備:環刀組件、牽引力負荷傳感器、無線動態應變采集儀組件、土壤緊實度測定儀、拉力計、水平尺、卷尺、直尺等。 試驗中選取地勢平坦,長度為300 m的試驗地塊,設定前、后10 m為調試區,中間30 m為工作平穩區。機具作業速度設定為0.7 m/s,以松土后胡蘿卜拔取力與機具前進阻力作為評價指標,將電阻式應變片粘貼在松土鏟前后兩側。采用屏蔽線按照半橋連接方式將電阻應變片接入到東華DH5908無線動態應變采集儀中采集機具前進阻力,利用拉力計對不同區域松土后胡蘿卜進行拔取力試驗并觀察機具后方漏拔情況,計算漏拔率,試驗重復5次,機具田間試驗情況如圖19所示。 圖19 田間試驗現場Fig.19 Field experiment site 田間試驗的目的是驗證虛擬仿真試驗得出的高效減阻松土鏟最佳結構組合是否具有良好的作業效果,試驗結果如表4所示。 試驗結果表明,高效減阻松土鏟作業時,前進阻力最大為2 034.23 N,最小為1 886.16 N,平均1 945.30 N;胡蘿卜拔取力最大為66.5 N,最小為54.3 N,平均58.7 N;漏拔率最大為3.6%,最小為2.7%,平均3.1%。與鑿式松土鏟相比,仿生鏟尖在破開壟面土壤的同時,土壤沿鏟尖內側曲線做變加速運動,土壤沿鏟尖上端飛出,減小土壤能量損失以達到減阻目的;鏟翼在土壤中滑動,破壞土壤與胡蘿卜間的粘附作用,增大土壤擾動面積及蓬松度;鏟柄隨后破開胡蘿卜行間表面土壤,進一步減小胡蘿卜與土壤粘附面積,降低胡蘿卜拔取力與漏拔率。 表4 田間性能對比試驗結果Tab.4 Field performance comparison experiment results 由表4可知,在相同工況下實際松土鏟作業質量略低于仿真試驗優化結果,其前進阻力相對誤差為4.0%,胡蘿卜拔取力相對誤差為6.0%。產生誤差的原因可能是由于土壤外界條件狀態變化造成機具非規則振動,影響機具作業穩定性,但誤差在可接受范圍內。與鑿式松土鏟相比,高效減阻松土鏟前進阻力降低5.79%,胡蘿卜拔取力降低20.68%,漏拔率降低3.8個百分點,滿足胡蘿卜收獲農藝要求。 (1) 設計了一種高效減阻松土鏟,提高了土壤擾動性,降低了前進阻力、胡蘿卜拔取力和漏拔率,滿足胡蘿卜收獲農藝要求。 (2) 以狗獾爪趾為仿生原型設計了仿生減阻鏟尖,分析了其減阻機理。建立了鏟翼與土壤間的力學接觸模型,探究鏟翼與土壤間力學規律,確定了影響松土鏟作業質量的鏟翼結構參數為鏟翼開角和鏟翼傾角。 (3) 利用離散元法建立了部件-土壤-作物多元仿真模型,以鏟翼開角和鏟翼傾角為試驗因素,以前進阻力和胡蘿卜拔取力為試驗指標,采用虛擬正交試驗方法建立了因素與指標間數學模型,運用多目標變量優化方法建立了優化模型,得出松土鏟鏟翼最優參數組合為鏟翼開角120.27°、鏟翼傾角47.37°。 (4) 田間性能試驗表明,田間試驗結果與仿真優化結果基本一致,高效減阻松土鏟前進阻力均值為1 945.30 N,胡蘿卜拔取力均值58.7 N,整機漏拔率為3.1%,高效減阻松土鏟綜合作業性能優于鑿式松土鏟,可滿足胡蘿卜收獲農藝要求。2.2 松土鏟翼

2.3 破土鏟柄
3 離散元模型建立與仿真分析
3.1 離散元模型建立



3.2 虛擬仿真過程與評價指標



4 虛擬仿真試驗與結果分析
4.1 虛擬仿真單因素試驗

4.2 虛擬仿真多因素試驗





5 田間性能試驗
5.1 試驗方法


5.2 田間試驗結果與分析

6 結論
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08