高速變姿態(tài)接苗鴨嘴式栽植機構(gòu)優(yōu)化設(shè)計與試驗
2020-06-29 01:17:12尹大慶張諾一周脈樂楊禹超尹思澤王金武
農(nóng)業(yè)機械學報 2020年6期
關(guān)鍵詞:優(yōu)化
尹大慶 張諾一 周脈樂 楊禹超 尹思澤 王金武
(東北農(nóng)業(yè)大學工程學院, 哈爾濱 150030)
0 引言
中國是世界上最大的蔬菜生產(chǎn)國[1],缽苗移栽是蔬菜主要種植方式之一[2]。市場上使用的蔬菜移栽機以半自動機型為主,人工喂苗勞動強度大、效率低[3-5]。國外移栽機以歐美和日本、韓國的為代表,歐美國家多采用機、電、液、汽為一體的全自動移栽機,如意大利Ferrari公司的全自動移栽機,效率較高,但結(jié)構(gòu)復雜、價格昂貴,且僅適用于大型農(nóng)場[6]。日本、韓國多使用小型移栽機,如日本洋馬公司研制的自動蔬菜移栽機,栽植機構(gòu)采用滑道式,滑道易磨損,效率低[7]。近年來,國內(nèi)學者也進行了很多針對性的研究。胡建平等[8]提出一種等速齒輪行星輪系鴨嘴式栽植機構(gòu),將鴨嘴固定在行星輪上,能夠滿足多株距移栽要求。俞高紅等[9]對適用于大株距的不等速行星輪系鴨嘴式蔬菜缽苗栽植機構(gòu)進行了研究,通過對非圓齒輪行星輪系的優(yōu)化,解決了固定在行星輪上的鴨嘴工作姿態(tài)問題,使其適合大株距移栽作物。王英等[10]、陳建能等[11]基于非圓齒輪行星輪系提出了一系列鴨嘴式移栽裝置,對栽植回程軌跡、穴口形狀以及動力學等進行了優(yōu)化,使栽植效果良好,且作業(yè)平穩(wěn)。
喂苗速度是制約鴨嘴式栽植機構(gòu)效率的主要因素,當采用自動取苗機構(gòu)并快速取苗、投苗時,缽苗的快速向下與鴨嘴的較高水平速度產(chǎn)生矛盾。為確保接苗的準確性,本文采用非圓齒輪行星輪系結(jié)合鴨嘴式植苗器,提出一種配合自動取苗機構(gòu)的高速變姿態(tài)接苗鴨嘴式栽植機構(gòu),優(yōu)化后接苗點形成“水滴”形軌跡,以實現(xiàn)不等速傳動獲得更優(yōu)良的速度和加速度特性,縮短運苗時間。
1 設(shè)計要求與工作原理
1.1 設(shè)計要求
根據(jù)蔬菜移栽的農(nóng)藝要求,機構(gòu)在工作時形成的軌跡既要保證接苗時鴨嘴方向與缽苗方向一致和植苗時秧苗的直立度,又要滿足蔬菜缽苗的農(nóng)藝特性,并確保將秧苗植入土中,如圖1所示。要求軌跡形成穴口寬度w≤30 mm,深度u≥45 mm[10-13]。因此要求栽植機構(gòu)以特定的軌跡實現(xiàn)接苗、運苗、入土開穴、栽植4個階段的周期運動。
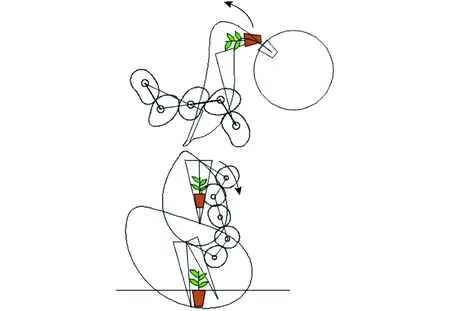
圖1 自動移栽機機構(gòu)示意圖Fig.1 Mechanism schematic of automatic transplanter
1.1.1軌跡與姿態(tài)
栽植機構(gòu)軌跡與姿態(tài)如圖2、3所示,接苗時,鴨嘴栽植器應盡量靠近投苗點,在最高點(AB段)附近接苗,且通過在最高點的擺動產(chǎn)生停頓,延長接苗時間以避免漏苗以及缽苗土缽損傷。植苗時為保證缽苗直立度,鴨嘴栽植器與土壤約呈90°角(CD段),入土角與出土角基本一致。綜上所述,針對高速非圓齒輪行星輪系取苗機構(gòu)設(shè)計出配套的栽植機構(gòu),得到滿足蔬菜缽苗移栽要求的運動軌跡——“水滴”形軌跡。
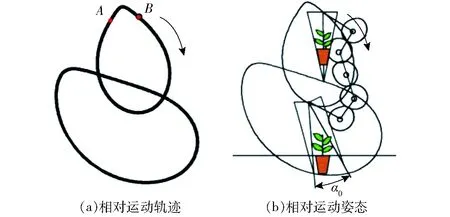
圖2 相對軌跡及姿態(tài)Fig.2 Relative trajectory and attitude
圖3 絕對軌跡及姿態(tài)Fig.3 Absolute trajectory and attitude
1.1.2工作速度
在栽植過程中,接苗段速度降低,保證秧苗輸送過程中無損傷;運苗段速度增加,提高植苗效率;植苗段速度減小且鴨嘴栽植器在最低點栽植速度趨于零速栽植[4]。
1.1.3鴨嘴栽植器開合狀態(tài)
鴨嘴栽植器在運苗、開穴、接苗前保持閉合狀態(tài),當鴨嘴栽植器處于最低點時,打開鴨嘴栽植器進行缽苗栽植,在下一次接苗前(鴨嘴栽植器最低點高于秧苗頂端一段距離時)鴨嘴栽植器閉合,避免發(fā)生帶苗現(xiàn)象。
鴨嘴栽植器開合大于秧苗缽體尺寸,且滿足凸輪加工工藝要求,保證鴨嘴栽植器開合運動穩(wěn)定,減少栽植部件開合振動,故要求鴨嘴栽植器張開角40°≥α0≥30°。
1.2 工作原理
栽植機構(gòu)包括傳動和栽植兩部分,如圖4所示。傳動部分由5個相互嚙合的非圓齒輪及行星軸、中間軸、太陽軸、齒輪箱、法蘭盤組成;栽植部分由凸輪、推桿、推板、支撐板、前鴨嘴支撐架、前鴨嘴、后鴨嘴支撐架、后鴨嘴、彈簧組成。動力輸出軸帶動齒輪箱勻速轉(zhuǎn)動,使其內(nèi)部的非圓齒輪相互嚙合,驅(qū)動支撐板做不等速運動。凸輪固接在齒輪箱上,隨著凸輪轉(zhuǎn)動,推動在滑道中的推桿平動,推桿的另一側(cè)與推板連接,并在推板的滑槽中進行往復運動,從而推動固接在推板上的前鴨嘴支撐架繞轉(zhuǎn)軸轉(zhuǎn)動,使前鴨嘴打開,后鴨嘴支撐架固接在支撐板上,從而達到打開鴨嘴栽植器的目的,待凸輪轉(zhuǎn)過一定角度,彈簧復位驅(qū)動鴨嘴栽植器閉合,實現(xiàn)鴨嘴栽植器開合動作。
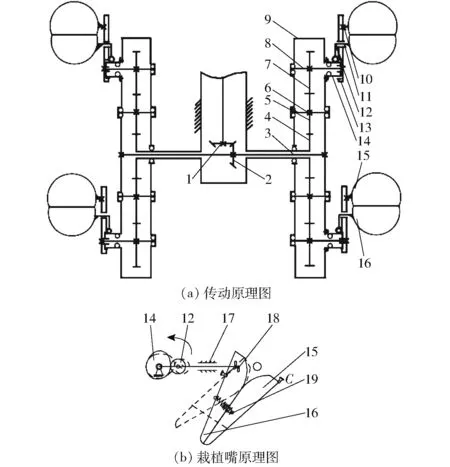
圖4 栽植機構(gòu)原理圖Fig.4 Principle diagrams of seedling planting mechanism1.上錐齒輪 2.下錐齒輪 3.動力輸出軸 4.太陽輪 5.中間輪 6.中間軸 7.行星輪 8.行星軸 9.齒輪箱 10.后鴨嘴支撐架 11.前鴨嘴支撐架 12.推桿 13.支撐板 14.凸輪 15.后鴨嘴 16.前鴨嘴 17.滑道 18.推板槽 19.彈簧
2 理論模型建立
2.1 傳動機構(gòu)理論模型

圖5 栽植機構(gòu)簡圖Fig.5 Schematic of seedling planting mechanism1.鴨嘴栽植器 2.行星輪 3.中間輪 4.太陽輪
以太陽輪轉(zhuǎn)動中心O1為原點,水平方向為X軸,垂直方向為Y軸建立坐標系,機構(gòu)簡圖如圖5所示。工作過程中,行星架順時針運動。針對傳動機構(gòu)一側(cè)進行研究,M為太陽輪與中間輪的嚙合點,N為中間輪與行星輪的嚙合點,R1為太陽輪的向徑,R2為中間輪的向徑,φ0為整體轉(zhuǎn)角,α為太陽輪初始安裝角,規(guī)定行星架順時針轉(zhuǎn)動為正,逆時針轉(zhuǎn)動為負。當行星架順時針轉(zhuǎn)動φ時,行星架的絕對轉(zhuǎn)角φh(φ)為
φh(φ)=φ0+φ+α
(1)
太陽輪的相對轉(zhuǎn)角φ1h(φ)和絕對轉(zhuǎn)角φ1(φ)分別為
(2)
中間輪的相對轉(zhuǎn)角φ2h(φ)和絕對轉(zhuǎn)角φ2(φ)分別為
(3)
式中a——齒輪中心距,mm
為便于機構(gòu)可調(diào),引入行星架拐角β0,則行星輪的相對轉(zhuǎn)角φ3h(φ)和絕對轉(zhuǎn)角φ3(φ)分別為
(4)
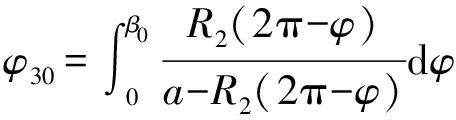
式中φ30——行星輪初始安裝角,rad
太陽輪轉(zhuǎn)動中心坐標為
x1(φ)=y1(φ)=0
(5)
中間輪轉(zhuǎn)動中心坐標為
(6)
行星輪轉(zhuǎn)動中心坐標為
(7)
由于機構(gòu)關(guān)于太陽輪中心呈180°對稱,另一側(cè)齒輪分析同理。
根據(jù)以上幾何關(guān)系及栽植點、接苗點軌跡方程,利用Visual Basic 6.0編程求解傳動機構(gòu)動態(tài)坐標值。
2.2 栽植嘴機構(gòu)理論模型
栽植嘴機構(gòu)簡圖如圖6所示,以太陽輪中心為原點建立坐標系。太陽輪固連在機架上,隨底盤前進,因行星輪中心與凸輪中心原點相同。以凸輪中心為原點建立坐標系,整體繞O點旋轉(zhuǎn),移栽機前進方向與X軸正向相同。令x0、y0為參數(shù)在以O(shè)點為原點的坐標系下的坐標分量,x′0、y′0為參數(shù)在O′點為原點的坐標系下的坐標分量。行星架OO′為原動件,點F為前鴨嘴轉(zhuǎn)軸中心,點G為前鴨嘴與推板鉸接點,點A1為栽植點,OO′順時針轉(zhuǎn)動帶動鴨嘴開合機構(gòu)轉(zhuǎn)動。凸輪隨行星架OO′以角速度ω轉(zhuǎn)動角度φ,通過建立數(shù)學模型,判斷鴨嘴栽植器位置來優(yōu)化栽植機構(gòu)軌跡與姿態(tài)。
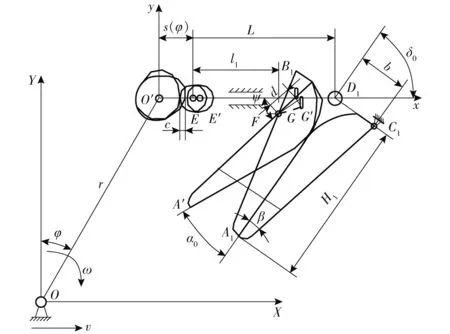
圖6 栽植嘴機構(gòu)簡圖Fig.6 Schematic of planting mechanism
通過行星輪轉(zhuǎn)動中心的位置坐標可求出栽植臂拐點坐標為
xD1(φ)=x3(φ)+s1cos(γ+φ-φ3h)
(8)
yD1(φ)=y3(φ)+s1sin(γ+φ-φ3h)
(9)
通過栽植臂拐點可以求出栽植點坐標
xA1(φ)=xD1(φ)+H1cos(φ-φ3h+γ-θ)
(10)
yA1(φ)=yD1(φ)+H1sin(φ+γ-φ3h-θ)
(11)
其中
γ=φ0+β0+δ0
式中s1——支撐板長度,mm
θ——鴨嘴栽植器相對支撐板轉(zhuǎn)角,rad
δ0——支撐板與行星架轉(zhuǎn)角,rad
當鴨嘴栽植器處于閉合位置時,各點坐標為
(12)
(13)
式中H1——鴨嘴栽植器高度,mm
b——鴨嘴栽植器半徑,mm
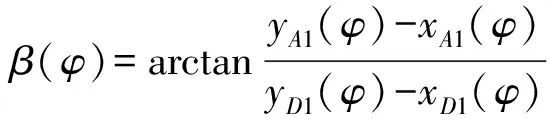
β——鴨嘴栽植器斜角,rad
當鴨嘴栽植器張開角α0時,各點坐標為
(14)
(15)
由于鴨嘴栽植器開合角度由凸輪控制,故根據(jù)鴨嘴栽植器張開角α0,可以推出凸輪推程
c=dα0/sin(180°-ψ-α0)
(16)
式中c——凸輪推程,mm
d——轉(zhuǎn)動中心與推桿間距離,mm
ψ——轉(zhuǎn)動中心與推桿間轉(zhuǎn)角,rad
根據(jù)以上幾何關(guān)系求解前后鴨嘴栽植點、接苗點的每時刻坐標值并擬合運動軌跡以圖形的形式輸出,便于進行栽植機構(gòu)軌跡及姿態(tài)優(yōu)化。
3 軟件開發(fā)
根據(jù)已經(jīng)建立的理論模型,開發(fā)栽植機構(gòu)優(yōu)化設(shè)計軟件,簡化設(shè)計過程,便于解決多目標、多參數(shù)、強耦合性的問題,縮短栽植機構(gòu)設(shè)計周期。
3.1 優(yōu)化目標
根據(jù)蔬菜缽苗移栽的農(nóng)藝要求及栽植機構(gòu)設(shè)計要求,選取羊角椒栽植株距400 mm進行優(yōu)化設(shè)計,并確立蔬菜栽植機構(gòu)需要滿足的目標要求,共設(shè)立7個優(yōu)化目標:入土與出土時鴨嘴栽植器相對于地面擺動角度差在0°~20°之間;齒輪箱與地面距離大于25 mm;軌跡高度大于200 mm;齒輪模數(shù)大于2.5 mm(由齒數(shù)及節(jié)曲線周長確定,節(jié)曲線周長通過優(yōu)化軟件優(yōu)化參數(shù)獲得);穴口寬在0~30 mm之間;穴口直立度(穴口中點與栽植最低點偏移量)小于等于15 mm;栽植臂不干涉[14-19]。
3.2 優(yōu)化軟件及參數(shù)確定
本軟件通過調(diào)節(jié)優(yōu)化設(shè)計變量(齒輪節(jié)曲線參數(shù)及鴨嘴栽植器結(jié)構(gòu)參數(shù)),達到設(shè)定的目標,實現(xiàn)對栽植機構(gòu)的結(jié)構(gòu)尺寸、運動狀態(tài)、軌跡的模擬,進而實現(xiàn)栽植機構(gòu)的優(yōu)化[20]。通過數(shù)學模型將圖形可視化,使栽植機構(gòu)更直觀且易于操作,優(yōu)化設(shè)計軟件界面如圖7 所示。
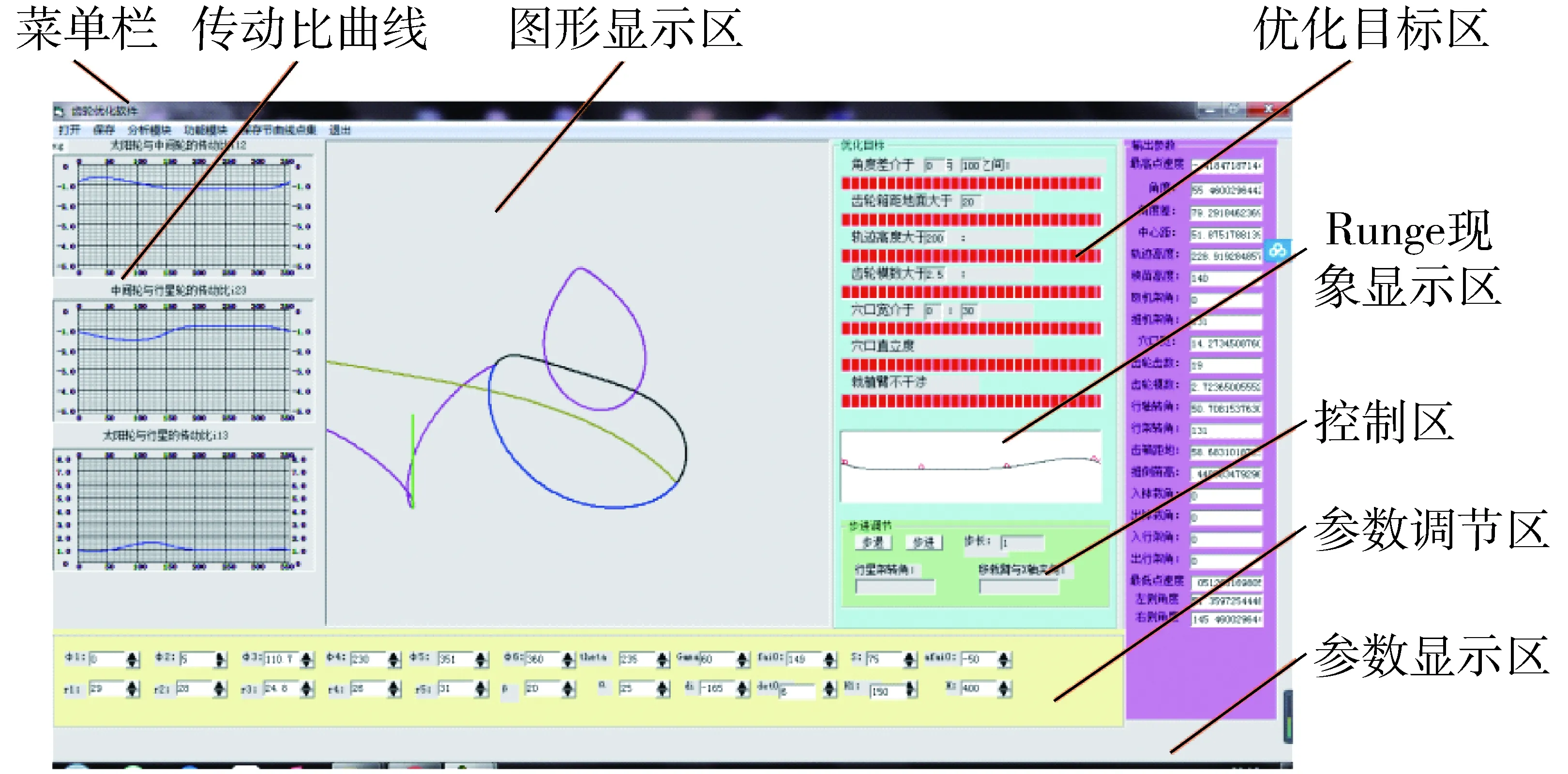
圖7 栽植機構(gòu)優(yōu)化設(shè)計軟件界面Fig.7 Software interface for optimal design of seedling mechanism
應用栽植機構(gòu)計算機優(yōu)化軟件得到一組較優(yōu)的滿足蔬菜栽植農(nóng)藝要求的參數(shù),齒輪節(jié)曲線參數(shù)包括(ri為齒輪節(jié)曲線的向徑,θi為齒輪節(jié)曲線的極角):r1=29 mm,r2=28 mm,r3=24.8 mm,r4=26 mm,r5=31 mm,θ1=0°,θ2=5°,θ3=110.7°,θ4=230°,θ5=351°,θ6=360°;結(jié)構(gòu)參數(shù)包括:鴨嘴栽植器相對支撐板轉(zhuǎn)角θ=235°,太陽輪初始安裝角α=25°,機構(gòu)及軌跡相對于坐標原點轉(zhuǎn)角φ0=149°,支撐板相對行星架轉(zhuǎn)角δ0=6°,支撐板長度s1=75 mm,行星架拐角β0=-50°,鴨嘴栽植器高度H1=150 mm。機構(gòu)優(yōu)化的目標值:入土與出土時鴨嘴栽植器相對于地面擺動角度差M1=18°,齒輪箱與地面距離M2=27 mm,軌跡高度M3=229 mm,齒輪模數(shù)M4=2.7 mm,穴口寬M5=14 mm,穴口直立度M6=12 mm,栽植臂最小距離M7=45 mm,皆滿足優(yōu)化目標要求。
4 三維模型建立與試驗驗證
根據(jù)栽植機構(gòu)計算機優(yōu)化軟件所得的參數(shù)對栽植機構(gòu)進行結(jié)構(gòu)設(shè)計以及三維模型建立,包括非圓齒輪行星輪系以及鴨嘴式栽植機構(gòu),并按照初始安裝位置完成栽植機構(gòu)的整體裝配。高速變姿態(tài)接苗鴨嘴式栽植機構(gòu)三維模型如圖8所示,對鴨嘴栽植器相關(guān)參數(shù)根據(jù)蔬菜秧苗物理特性進行設(shè)計。
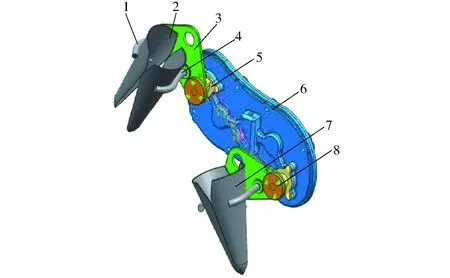
圖8 高速變姿態(tài)接苗鴨嘴式栽植機構(gòu)三維模型Fig.8 Three-dimensional model of high speed duckbill planting mechanism with variable catch-seedling attitude1.前鴨嘴支撐架 2.前鴨嘴 3.支撐板 4.后鴨嘴支撐架5.凸輪 6.齒輪箱 7.后鴨嘴 8.行星軸
4.1 基于ADAMS的仿真分析
將裝配好的模型導入ADAMS軟件中進行虛擬樣機的運動仿真,邊界條件設(shè)置:轉(zhuǎn)速40 r/min、前進速度0.53 m/s、重力加速度9.8 m/s2,可得栽植機構(gòu)的相對、絕對運動軌跡(圖9)與理論軌跡(圖10)基本一致。
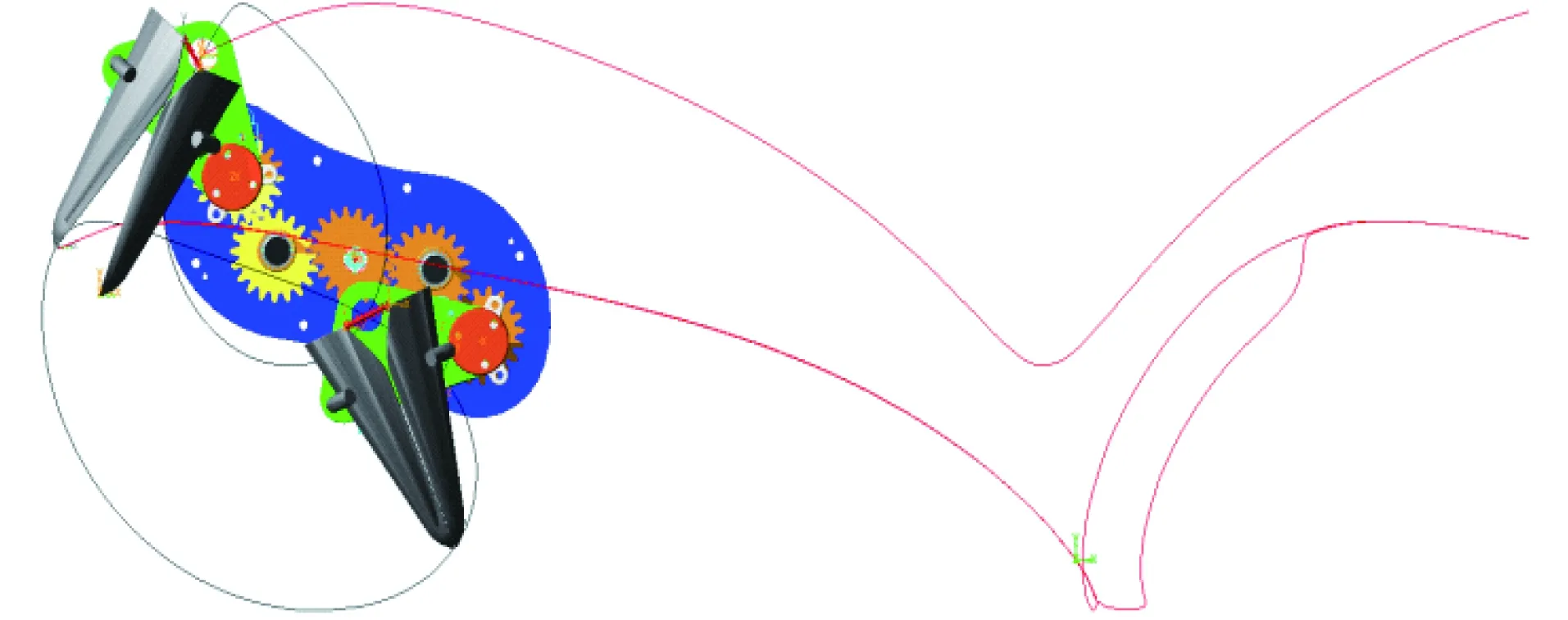
圖9 虛擬仿真軌跡Fig.9 Virtual simulation track

圖10 優(yōu)化軟件理論軌跡Fig.10 Theoretical trajectory of optimization software
4.1.1鴨嘴栽植器擺角
支撐板初始位置相對于Y軸正方向轉(zhuǎn)角為6°,鴨嘴栽植器相對于Y軸正方向擺動角度變化如圖11所示。支撐板轉(zhuǎn)角為19°~45°時鴨嘴栽植器擺角在11°~-10°之間變化,為鴨嘴栽植器入土栽植階段。當支撐板轉(zhuǎn)角為28° 時鴨嘴栽植器運動到最低點位置(A點)且鴨嘴栽植器擺角為0°,為最佳栽植點,保證栽植的起始直立度。當支撐板轉(zhuǎn)角為52°~15°時鴨嘴栽植器擺角在-20°~17°之間變化,為接苗階段。當支撐板轉(zhuǎn)角為28°時(B點)為最佳接苗點,此時鴨嘴栽植器擺角為0°,滿足設(shè)計要求。
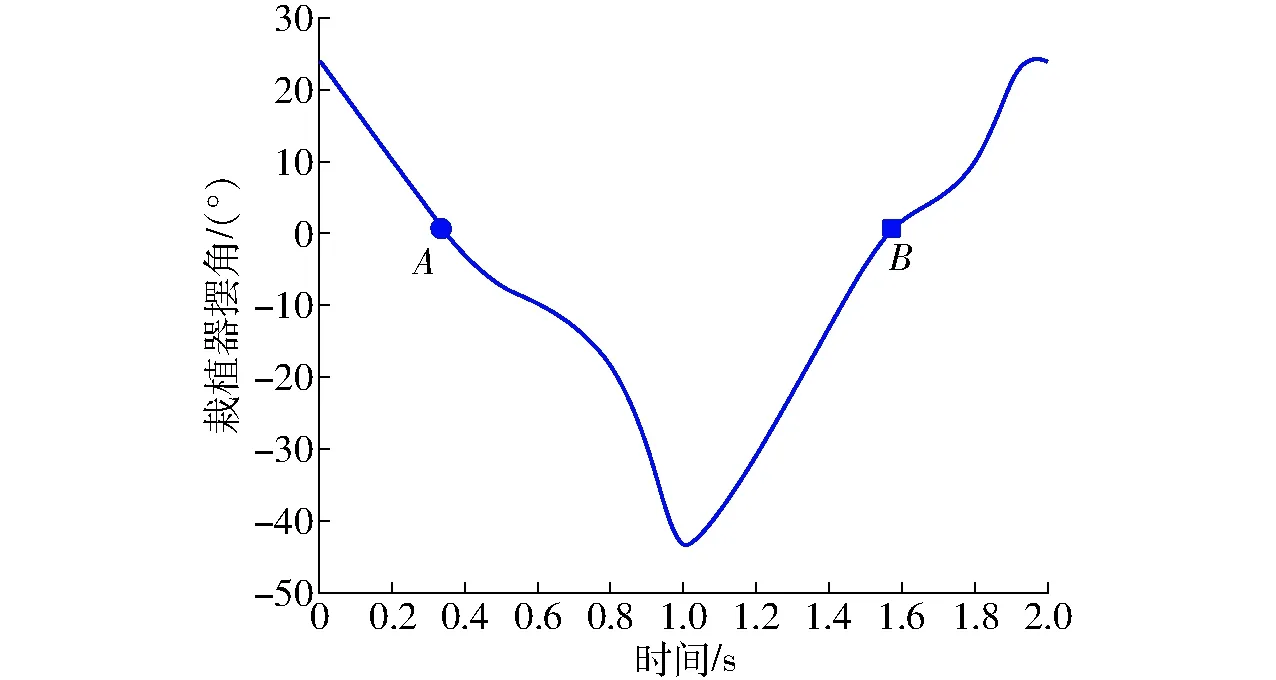
圖11 鴨嘴栽植器擺角變化曲線Fig.11 Variation curve of angle for duckbill planter
4.1.2速度曲線
在移栽效率為80株/min時,仿真后接苗點水平方向速度如圖12所示。栽植點水平方向速度如圖13所示。
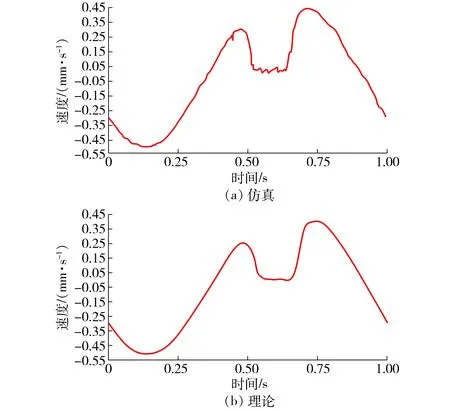
圖12 接苗點水平方向速度曲線Fig.12 Horizontal direction velocity curves of jointing point
由圖12、13可知,栽植機構(gòu)在ADAMS仿真中得到的速度曲線與計算機仿真優(yōu)化軟件中得到的曲線趨勢相同。鴨嘴栽植器在接苗的一段時間內(nèi)水平速度趨近于零,便于接苗平穩(wěn)準確,不損傷苗缽。在鴨嘴栽植器入土階段,栽植點的水平速度也接近于零,有利于實現(xiàn)零速栽植,從而保證秧苗的直立度,滿足設(shè)計要求。
4.2 高速攝影試驗驗證
為縮短研發(fā)周期,采用3D打印技術(shù)制造物理樣機。將裝配好的樣機安裝在試驗臺上進行高速攝影試驗,測量鴨嘴栽植器栽植端點及上端中心點形成的實際軌跡。對高速攝影得到的實際軌跡與計算機優(yōu)化軟件中得到的優(yōu)化軌跡進行比對,如圖14所示,理論軌跡與實際軌跡基本一致。

圖13 栽植點水平方向速度曲線Fig.13 Horizontal velocity curves of planting point

圖14 高速攝影與優(yōu)化軌跡對比Fig.14 Comparison of high-speed photography and optimized trajectory
4.3 物理樣機接苗與栽植試驗
為進一步驗證高速變姿態(tài)接苗鴨嘴式栽植機構(gòu)的性能,對栽植機構(gòu)進行接苗與栽植試驗,試驗選取的羊角椒缽苗如圖15所示,當缽苗6片子葉、缽苗苗齡為45 d時進行試驗,試驗選用特定軟質(zhì)秧盤進行育苗,穴數(shù)為72穴,上穴口尺寸為40 mm×40 mm,下穴口尺寸為20 mm×20 mm,穴口深度為45 mm[21]。隨機選取50株缽苗進行物理特性統(tǒng)計分析,缽體高度最大值為44.8 mm,缽苗高度最大值為137.2 mm,葉冠直徑最大值為88.2 mm,缽體上端尺寸最大值為39.3 mm,缽體下端尺寸最大值為18.8 mm。
試驗采用課題組研制的多功能缽苗移栽試驗臺[8,22-23],栽植試驗如圖16所示,安裝物理樣機,設(shè)置試驗臺工作轉(zhuǎn)速為30 r/min,并以0.4 m/s的速度移動土槽。取144株缽苗進行試驗,處理數(shù)據(jù)時去除前后5株缽苗取134株為一組進行試驗,并重復3次,栽植效果如圖17所示。

圖16 接苗-栽植試驗現(xiàn)場Fig.16 Seedling-planting test diagram1.栽植機構(gòu) 2.試驗臺架 3.傳動部件 4.秧苗 5.土槽

圖17 接苗-栽植試驗效果Fig.17 Seedling-planting test effect diagram
栽植性能驗證標準如下:秧苗莖稈與地面的夾角α1≤45°為倒伏,45°<α1<70°為合格,α1≥70°為優(yōu)良,栽植深度h滿足32 mm≤h≤60 mm為合格[24-25]。
對所得數(shù)據(jù)進行整理得到試驗結(jié)果如表1所示,參考旱地栽植機械行業(yè)標準JB/T 10291—2013要求,栽植效果需達到傷苗率小于等于5%,栽植合格率大于等于90%,栽植深度合格率大于等于75%[19,25]。在試驗臺上進行的試驗結(jié)果如表1所示:平均栽植合格率為99.8%,平均栽植深度合格率為 99.2%,結(jié)果證明機構(gòu)能夠較好地滿足栽植要求。
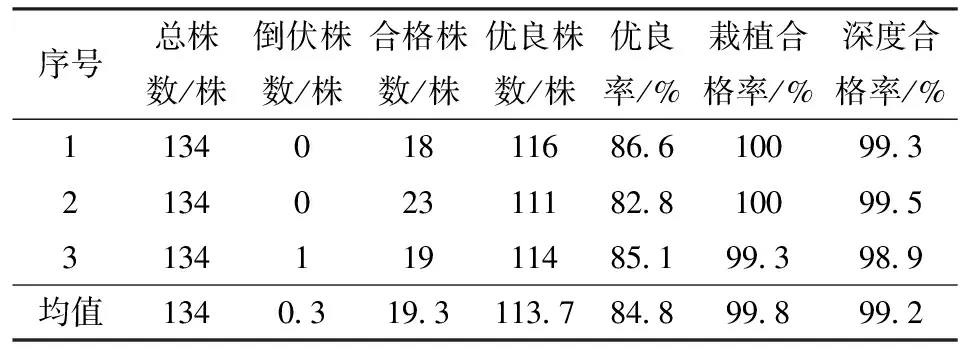
表1 栽植性能驗證試驗結(jié)果Tab.1 Test results for verification of seedling performance
5 結(jié)論
(1)根據(jù)蔬菜缽苗在移栽農(nóng)藝上對軌跡、姿態(tài)、接苗與栽植的要求,建立了目標函數(shù),優(yōu)化獲得“水滴”形接苗點的相對運動軌跡,通過鴨嘴栽植器在接苗點的停留和擺動延長接苗時間。
(2)提出了一種高速變姿態(tài)接苗鴨嘴式栽植機構(gòu),建立了栽植機構(gòu)的數(shù)學模型,根據(jù)數(shù)學模型開發(fā)了計算機優(yōu)化軟件,優(yōu)化得出滿足工作要求的設(shè)計參數(shù)。
(3)通過分析比較理論軌跡、ADAMS仿真軌跡和高速攝影軌跡,驗證了栽植機構(gòu)的理論模型與結(jié)構(gòu)設(shè)計的正確性與可行性。通過仿真分析得到接苗點以及栽植點的速度曲線,驗證了接苗與栽植時的速度滿足設(shè)計要求。
(4)臺架試驗結(jié)果表明,栽植機構(gòu)的平均栽植合格率為99.8%,平均栽植深度合格率為 99.2%,滿足直立度與移栽要求,驗證了該栽植機構(gòu)的實用性。
猜你喜歡
房地產(chǎn)導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導向(2021年7期)2021-07-16 07:07:52
中學生數(shù)理化(高中版.高二數(shù)學)(2021年12期)2021-04-26 07:43:48
中學生數(shù)理化(高中版.高考數(shù)學)(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45